CAN总线多点温度采集节点硬件设计
- 格式:doc
- 大小:27.50 KB
- 文档页数:4
基于CAN总线多点温度检测系统的设计
赵亮
【期刊名称】《机械管理开发》
【年(卷),期】2013(000)001
【摘要】采用CAN总线技术,设计了对魔芋烘干线流化床内多点温度进行检测的硬件电路,利用Lab Windows/CVI软件开发平台,开发了友好交互界面,实现了对多点温度进行采集和实时显示等功能。
【总页数】2页(P128-129)
【作者】赵亮
【作者单位】陕西理工学院机械工程学院,陕西汉中 723003
【正文语种】中文
【中图分类】TP277.3
【相关文献】
1.基于Lab Windows/CVI多点温度检测系统的设计 [J], 赵亮
2.基于STM32的多点温度检测系统设计 [J], 徐宏宇;沈煌飞
3.基于CAN总线的粮库多点温度检测系统的设计 [J], 吕昌江;段晨旭;罗婷
4.基于单片机的多点温度检测系统设计 [J], 付秀伟
5.基于单片机的多点温度检测系统设计 [J], 付秀伟
因版权原因,仅展示原文概要,查看原文内容请购买。
【摘要】随着科学技术的发展,为提供农作物生长的最佳环境,大棚种植也成为现代农业种植中必要可行的一种方式。
在温室大棚中的温度实时监测与控制却成为为一个难题。
因此基于CAN总线的主要优点,再从CAN总线的可靠性,它的优越性以及低成本出发,采用基于CAN总线多点温度采集系统的设计,该系统采用非破坏性总线仲裁技术具有实时性高,精度高,灵活性强能够及时信息的测控。
本课题是采用一种基于CAN总线的多点温度采集系统。
论文根据系统的要求完成了整体的方案设计和系统选型。
该方案是利用温度传感器PT100将温室大棚内温度的变化,经放大电路送入含A/D转换器的单片机的采集模块完成A/D转换,在通过CAN收发器将信号传至住监视器。
再经过液晶显示器进行数据显示。
CAN总线通信模块是本次设计中的核心技术,它负责系统中主控器和执行器之间的数据通信。
经过试验验证表明该系统可靠性好、精度高、结果简单、成本低在使用范围可代替传统的测温系统的不足。
【关键词】CAN总线微控制器传感器Pt100 液晶显示器。
Design of multi-spot temperature gathering system based on CANbus【Abstract】With the development of science and technology, to provide the best environment for crop growth, greenhouse cultivation has become an essential of modern farming viable way. The temperature in greenhouse real-time monitoring and control has become a problem. Therefore, the main advantages based on CAN bus, CAN bus, and from the reliability, technological superiority of the system operation and low cost starting point based on CAN bus multi-temperature collection system design, system technology using non-destructive real-time bus arbitration high, high precision, flexibility and timely information to the monitoring and control.This issue is based on CAN bus using a multi-point temperature acquisition system. System requirements thesis completed under the overall program design and system selection. The program is the use of the greenhouse temperature sensor PT100 temperature changes, the amplifier circuit into with A / D converter module to complete the acquisition of SCM A / D converter, CAN transceiver through the signal transmitted live monitor. Data for another LCD display. CAN bus communication module is the core of this design technique, which is responsible for the system and implementation of master data communication between devices.Tested to verify that the system reliability, high accuracy, the results of simple, low cost alternative to the use of conventional temperature measurement system deficiencies.【Keywords】The can bus MCU sensor Pt100 LCD monitors。


CAN总线多点温度采集节点硬件设计作者:俞洪来源:《科技视界》2013年第25期【摘要】随着科学技术的发展,温度监控系统的应用越来越广泛,本文阐述了一种基于CAN总线的多点温度采集系统,可以实现温度实时监测,该系统能应用于工农业生产的诸多场合。
系统以AT89C52单片机为微处理器,外接数字式温度传感器DS18B20获得现场环境的温度信号。
通过CAN总线控制器SJA1000和CAN总线驱动器PCA82C250将数据发送到CAN总线上,从而实现对温度的采集。
【关键词】CAN总线;节点;温度采集0 概述现场总线是安装在生产制造过程中的装置与控制室内的控制装置之间的一种数字式、串行、多点通信的数据线。
应用现场总线技术不仅可以降低系统的布线成本,还具有设计简单、调试方便等优点。
同时,由于现场总线本身还提供了灵活且功能强大的协议,这就使得用户对系统配置,设备选型具有强大的自主权,可以任意的将多种功能模块组合起来扩充系统的功能。
在众多的现场工业总线中。
随着温度控制技术在各个领域得到广泛地推广和应用,相关行业对温度控制技术的要求与日俱增。
目前市场上也有一些温度控制系统,但是这些系统在传送数据时实时性能实现的不是很好,而CAN总线的实时性强、成本低,而且还具备可靠性高、抗干扰强等特点。
综合多方面因素考虑,我们能够利用CAN总线的特点和优势设计温度控制系统。
1 设计方案1.1 系统功能要求系统能够接受数字式温度传感器DS18B20的温度信号,将温度信号传给单片机,完成单片机最小系统设计,并把此系统作为CAN的节点,节点的硬件包括AT89C52单片机、CAN 总线驱动器PCA82C250、CAN总线控制器SJA1000、单片机的时钟和复位电路。
主要研究基于AT89C52单片机与DS18B20数字温度传感器的多点温度测量系统。
完成数字式温度传感器与CAN总线节点的接口设计及电路设计,实现具有数字式串行温度采集功能的CAN总线节点的硬件设计。
基于CAN总线的多路温度采集系统的设计学生姓名:朱广东指导教师:黄震梁浙江树人大学信息科技学院电子信息工程114班摘要以嵌入式处理器为核心,总结CAN总线通信技术,设计一套由一个主机,两个从机组成了温度采集的系统,两个从机使用Pt100温度传感器来采集各自部分的温度值,通过CAN 总线将两个从机的温度数据传输给主机,主机接收到从机数据,并将各个从机的温度值显示在LCD液晶屏上。
关键词:温度采集;ARM7;CAN总线;1引言1.1CAN总线研究背景与意义在现代化的工业生产中,温度是极为普遍又极为重要的热工参数之一。
例如:在冶金工业、化工生产、电力工程、造纸行业、机械制造和食品加工等诸多领域中,人们都需要对各类加热炉、热处理炉、反应炉和锅炉中的温度进行检测和控制。
温度控制不好就可能引起生产安全,产品质量和产量等一系列问题。
尽管温度控制很重要,但是要控制好温度常常会遇到意想不到的困难.采用CAN总线对温度迸行控制,不仅具有控制方便、组态简单和灵活性大等优点,而且可以大幅度提高被控温度的技术指标,从而能够大大提高产品的质量和数量。
控制器局部网(CAN—CONTROLLER AREA NETWORK)是BOSCH公司为现代汽车应用领先推出的一种多主机局部网,由于其卓越性能,现己广泛应用于工业自动化、多种控制设备、交通工具、医疗仪器以及建筑、环境控制等众多部门。
CAN总线从形成并应用于汽车工业至今,其突出的特点和优异的性能使它的应用范围不断的扩大。
目前在机械工业、纺织工业、机器人、医疗器械、传感器、智能小区管理和家用电器等领域都得到了应用和发展。
而且CAN也是目前为止唯一具有国际标准的现场总线,因此CAN具有广阔的前景。
CAN总线与一般的通信总线相比,它的数据通信具有突出的可靠性、实时性和灵活性。
概括起来有下列一些突出的特点:1.CAN总线为多主工作方式,网络上任一节点均可在任意时刻主动地向网络上其它节点发送信息,而不是传统的主从方式。


基于CAN总线的多点温度监测及报警系统设计毕业设计论文基于CAN总线的多点温度监测及报警系统设计摘要本文设计的是一套基于CAN总线的多点温度检测及报警系统,主要是对粮仓的温度监控,以确保储粮的安全。
系统设计分为主控模块和监控模块。
主控监控两模块的微处理器都采用AT89S52单片机。
为了实现主控模块对监控模块的实时监测,在主控端和监控端处都设计有CAN 通信电路,由控制器SJA1000和收发器82C250组成CAN通信接口。
另外,主控端的外围电路部分包括时钟电路功能模块、EEPROM存储电路模块、串口通信电路模块、译码电路功能模块、液晶显示屏模块;监控端的外围电路部分为温度传感器。
主控端的时钟芯片选用DS12887,EEPROM存储芯片选用户AT24C16,显示屏采用FM12232B 液晶模块。
监控端的温度传感器采用数字传感器DS18B20,系统设置温度传感器的阐值为50℃。
本文给出了系统的结构和软硬件设计方案,可实现实时温度测量、越限报警等功能。
该系统具有可靠性好、通信速率高、抗干扰能力强等特点。
本系统还适用于在粮仓、北方暖气和热水供应中心、大面积水泥铺建等多种场合。
关键词:CAN总线;DS18B20;AT89S52BASED ON CAN BUS MULTIPOINT TEMPERATUREMONITORING AND ALARMING SYSTEM DESIGNABSTRACTThis paper designs a multi-point temperature detection and alarm system based on CAN bus , this system is mainly used to monitor the temperature of granary, to ensure the safety of the stored grain.This system is divided into the main control module and the surveillance module. The microprocessor of the main control module and the surveillance module both use DSP AT89S52microcontroller. In order to achieve real-time monitoring and measuring of the surveillance module,CAN communications circuits are designed at the port of the main control module and the surveillance module,which is composed by the controller SJA1000 and the 82C250 communications interface. In addition, the external circuit section of the main control module includes the clock circuit modules, EEPROM memory circuit module, serial communication circuit module, decoding circuit modules, LCD modules; the main portion of the external circuit section of the surveillance module is the temperature sensor. The clock chip of the main control module uses DS12887, the EEPROM memory chip can select AT24C16, the LCD display module can select FM12232B. The temperature sensor of the surveillance module use the digital sensor DS18B20, the lininal value of the temperature sensor is setted at 50 ℃ by the system.This paper presents the architecture of the system and the hardware and software design proposal , enabling the function of real-time temperature measurement and the off-limited alarm .The system has good reliability, high transmission rate, strong anti-interference and so on. This system can also be applied to the granary, the north central heating and hot water supply center, the cement paving of a large area and other occasions.Keywords: CAN-bus;DS18B20;AT89S52目录1 绪论 (5)1.1 背景介绍 (5)1.2 国内外相关技术发展概况 (5)1.2.1 温度传感器的发展概况 (5)1.2.2 现场总线概况 (6)1.3 温度监测及报警系统的应用前景 (7)2 现场总线CAN原理介绍 (7)2.1 现场总线简介 (7)2.2 CAN总线简介 (8)2.2.1 CAN-bus的产生与发展 (9)2.2.2 CAN-bus的基本工作原理 (9)2.2.3 CAN-bus的特征 (10)2.2.4 CAN协议简介 (11)3 基于CAN多点温度检测系统的总体设计 (15) 3.1 系统总体方案设计 (15)3.2 系统设计的主要器件选择 (16)3.2.1 微处理器 (16)3.2.2 SJA1000控制器 (17)3.2.3 PCA82C250总线收发器 (19)3.2.4 温度传感器的选择 (21)3.2.5 显示器的选择 (24)3.3 系统硬件结构组成 (26)4 系统的硬件设计 (28)4.1 单片机最小系统设计 (28)4.2 串口电路设计 (29)4.3 EEPROM (30)4.4 CAN通信电路设计 (30)4.4.1 CAN通信结构框图 (31)4.4.2 CAN通信电路电源模块 (32)4.4.3 CAN通信接口电路 (32)4.5 时钟电路设计 (33)4.6 译码电路 (34)4.7 液晶显示屏 (35)4.8 温度传感器 (36)4.9 键盘电路 (37)4.10 报警电路 (38)5 系统的软件设计 (40)5.1 系统整体软件设计 (40)5.2 主控模块软件设计 (40)5.2.1 CAN控制器的初始化 (40)5.2.2 主控端巡检监控端 (43)5.2.3 外围电路软件设计 (43)5.3 监控模块软件设计 (50)5.3.1 CAN通信模块软件设计 (50)5.3.2 温度传感器的软件设计 (50)6 结论 (51)参考文献 (52)致谢 (52)附录 (52)附录A 程序清单 (52)附录B 主控系统电路原理图 (53)附录C 监控系统电路原理图 (53)1 绪论1.1 背景介绍我国是一个农业大国,每年都有大量的新粮收获也有部分陈粮积压,由于储存不当会造成大量的粮食浪费,科学储粮是粮食生产的一个重要环节,若管理不当,粮食发霉或生虫会造成极大浪费,给国家和人民造成了巨大的经济损失,粮仓的性能成为粮食质量的决定因素。
基于CAN总线的多点测温系统陈猛豪北京邮电大学自动化学院,北京 (100876)E-mail:chen_menghao@摘要:本文结合实际使用经验提出一种基于CAN 总线的多点测温系统,介绍了CAN总线和DS18B20 的工作原理以及整个系统的硬件结构和软件编程。
并提出一种新的DS18B20的定位方法。
该系统能够实时检测环境中多点温度的变化, 准确反映温度信息,在粮仓、楼寓等系统中具有广泛的应用前景。
关键词:CAN 总线,DS18B20,多点测温中图分类号:TP2161.引言在工、农业生产和日常生活中,对温度的测量及控制占据着极其重要地位。
首先让我们了解一下多点温度检测系统在各个方面的应用领域:消防电气的非破坏性温度检测,电力、电讯设备之过热故障预知检测,空调系统的温度检测,各类运输工具之组件的过热检测,保全与监视系统之应用,医疗与健诊的温度测试,化工、机械…等设备温度过热检测。
温度检测系统应用十分广阔。
本设计运用主从分布式思想,由一台上位机(PC微型计算机),下位机(单片机)多点温度数据采集,组成两级分布式多点温度测量的巡回检测系统[1]。
该系统采CAN总线通讯,通过上位机(PC)控制下位机(单片机)进行现场温度采集。
温度值既可以送回主控PC进行数据处理,由显示器显示。
同时单片机也实时显示当前各点的温度值。
下位机采用的是单片机AT89S52[2],数字温度传感器是DS18B20。
DS18B20利用单总线的特点可以方便的实现多点温度的测量,轻松的组建传感器网络,系统的抗干扰性好、设计灵活、方便,而且适合于在恶劣的环境下进行现场温度测量。
本系统可以应用在大型工业及民用常温多点监测场合。
如粮食仓储系统、楼宇自动化系统、温控制程生产线之温度影像检测、医疗与健诊的温度测试、空调系统的温度检测、石化、机械…等。
2.系统工作原理介绍CAN总线和数字温度传感器是DS18B20工作原理和优点。
2.1 CAN总线的特点和工作原理CAN总线是一种先进的串行通信协议,其主要特点是: CAN为多主方式工作,网络上任一节点均可在任意时刻主动地向网络上其他节点发送信息,而不分主从,通信方式灵活,且无需站地址等节点信息[3]。
基于CAN总线的多点红外测温系统设计Design of multi-point infrared temperature measurement system based on CAN bus赵 旭 (鹤壁职业技术学院,河南鹤壁 458030)摘 要:在工业控制领域,温度测量是不可或缺的工作。
随着工业控制精细化、多点化要求,多点测温系统的需求空间越来越大。
本文基于CAN总线设计了一个多点测温系统,硬件电路由微处理器、CAN控制器与驱动器、数字测温芯片DS18B20、LCD、复位电路等几部分组成,单片机STC89C52RC是硬件电路的核心,承担CAN控制器的初始化、数据收发控制等任务。
实验证明,该系统精度高,可靠性好,结构简单,成本低,适用范围内可取代传统测温系统。
关键词:CAN总线;多点测温系统;DS18B20温度传感器1 引言在工业控制领域,温度测量是不可或缺的工作。
随着工业控制精细化、多点化要求,多点测温系统的需求空间越来越大。
CAN(控制器域网,Controller Area Network)总线在组网和通信功能上的优点以及它的高价比决定了它在众多领域具有广阔的发展前景,尤其是在分布在多点测温应用方面。
本文基于CAN总线设计了一个多点红外测温系统,能够实时对多点进行测温,具有测温范围广、精度高、环境适应能力强等特点。
2 硬件设计CAN总线多点测温系统主要由现场设备,主控设备和计算机组成,系统总体结构图如图1。
图1 系统结构图2.1 温度测量电路设计DS18B20传感器可以把温度直接转换成串行数字信号供微控制器进行处理。
由于每个传感器含有唯一的硅串行数,故一条总线上可以有任意多个DS18B20芯片。
本设计中的DS18B20是在模拟的现场节点上的,采用不同材质的通信电缆,其最大测温范围不一样。
因此,使用DS18B20设计长距离测温系统时,电容与阻抗匹配问题是不可忽略的一个因素。
DS18B20的寄生电源模式有两项基本功能,一是保证微处理器和DS18B20之间的正常通讯,二是为DS18B20提供电源。
can温度采集课程设计一、课程目标知识目标:1. 学生能理解温度采集的基本原理,掌握温度传感器的工作方式及其在智能控制系统中的应用。
2. 学生能够描述温度数据的读取、处理和传输过程,并运用相关公式进行简单的温度转换计算。
3. 学生能够了解温度采集系统的设计要求,包括硬件选择和软件编程的基本原则。
技能目标:1. 学生能够独立操作温度传感器,进行温度数据采集,并通过编程实现数据的实时显示。
2. 学生能够运用所学知识,结合实际需求设计简单的温度控制程序,培养解决问题的能力。
3. 学生能够通过小组合作,共同完成温度采集系统的搭建与调试,提高团队协作能力。
情感态度价值观目标:1. 学生在探索温度采集的过程中,培养对物理和信息技术学科的兴趣,激发学习热情。
2. 学生在动手实践中,体验创新与挑战的乐趣,增强自信心和成就感。
3. 学生能够认识到温度采集技术在现实生活中的应用,提高对智能科技的关注度,培养社会责任感和时代使命感。
课程性质:本课程为实践性较强的信息技术课程,旨在帮助学生将理论知识与实际操作相结合,提高学生的动手能力和创新能力。
学生特点:考虑到学生所在年级的特点,课程内容以基础知识为主,注重引导学生从实际操作中掌握原理,培养学生主动探究、解决问题的能力。
教学要求:课程应注重理论与实践相结合,强调学生的主体地位,教师需提供适当的指导与支持,确保学生在课程中能够达到预期的学习成果。
通过课程学习,为学生今后的深入学习奠定基础。
二、教学内容1. 温度传感器原理:介绍温度传感器的工作原理,包括热敏电阻、热电偶等类型,分析不同传感器的优缺点及适用场景。
教学内容关联教材章节:第三章第二节“温度传感器及其应用”2. 数据采集与处理:讲解温度数据的读取、转换和传输过程,涉及模数转换器(ADC)的使用,以及数据在微控制器中的处理方法。
教学内容关联教材章节:第四章“数据采集与处理”3. 硬件设备连接:指导学生如何将温度传感器与微控制器(如Arduino)相连接,了解必要的电路知识,掌握硬件搭建方法。
基于CAN总线的温度检测节点设计
在对电子点火模块的测试中,为了模拟电子点火系统的真实工况,电子点火模块往往被置于高于常温的环境下进行电子点火实验,以获得最接近真实汽车运行工况的点火参数数据。
由于电子点火模块自身的发热,其核心元件的温度成为影响电子模块性能的重要因素;另外,还要考虑环境温度是否达到模拟真实工况的要求等。
本文介绍了一种应用LM35 温度传感器和PICMicro 的温度检测节点的设计方案,用于检测在模拟汽车电子点火的过程中,电子点火模块的核心模块温度和环境温度,将阐明模块结构、工作原理及采样值量化的方法。
节点原理与结构
该温度检测节点由传感器电路、信号调理电路、单片机应用系统、CAN 总线接口等构成。
电路基本工作原理是:传感器电路将感应到的温度信号以电压的形式输出到信号调理电路,信号经过调理后输入到A/D 采样电路,由ADC 将数字量值送给单片机系统。
单片机系统将监控实时温度,当温度超过警戒值和危险值时,单片机将主动发送警告信息到上位机,提醒操作人员检查。
模块逻辑结构如图1 所示。
图1 温度检测节点逻辑结构
传感器电路采用温度传感器LM35,供电电压为15V 直流,工作电流为120mA ,功耗极低,在全温度范围工作时,电流变化很小,电压输出采用差动信号方式,由2、3 引脚直接输出。
LM35 输出信号经过一个由RC 组成的LP 滤波器,滤除高频的噪声干扰。
本节点的核心MCU 是PIC16F87x,是Microchip 公司推出的低功耗8 位单。
CAN总线多点温度采集节点硬件设计
【摘要】随着科学技术的发展,温度监控系统的应用越来越广泛,本文阐述了一种基于CAN总线的多点温度采集系统,可以实现温度实时监测,该系统能应用于工农业生产的诸多场合。
系统以AT89C52单片机为微处理器,外接数字式温度传感器DS18B20获得现场环境的温度信号。
通过CAN总线控制器SJA1000和CAN总线驱动器PCA82C250将数据发送到CAN总线上,从而实现对温度的采集。
【关键词】CAN总线;节点;温度采集
0 概述
现场总线是安装在生产制造过程中的装置与控制室内的控制装置之间的一种数字式、串行、多点通信的数据线。
应用现场总线技术不仅可以降低系统的布线成本,还具有设计简单、调试方便等优点。
同时,由于现场总线本身还提供了灵活且功能强大的协议,这就使得用户对系统配置,设备选型具有强大的自主权,可以任意的将多种功能模块组合起来扩充系统的功能。
在众多的现场工业总线中。
随着温度控制技术在各个领域得到广泛地推广和应用,相关行业对温度控制技术的要求与日俱增。
目前市场上也有一些温度控制系统,但是这些系统在传送数据时实时性能实现的不是很好,而CAN总线的实时性强、成本低,而且还具备可靠性高、抗干扰强等特点。
综合多方面因素考虑,我们能够利用CAN总线的特点和优势设计温度控制系统。
1 设计方案
1.1 系统功能要求
系统能够接受数字式温度传感器DS18B20的温度信号,将温度信号传给单片机,完成单片机最小系统设计,并把此系统作为CAN的节点,节点的硬件包括AT89C52单片机、CAN总线驱动器PCA82C250、CAN总线控制器SJA1000、单片机的时钟和复位电路。
主要研究基于AT89C52单片机与DS18B20数字温度传感器的多点温度测量系统。
完成数字式温度传感器与CAN总线节点的接口设计及电路设计,实现具有数字式串行温度采集功能的CAN总线节点的硬件设计。
应用CAN总线控制器SJA1000及其总线收发器的工作原理,完成数字式温度传感器与CAN总线节点的接口设计。
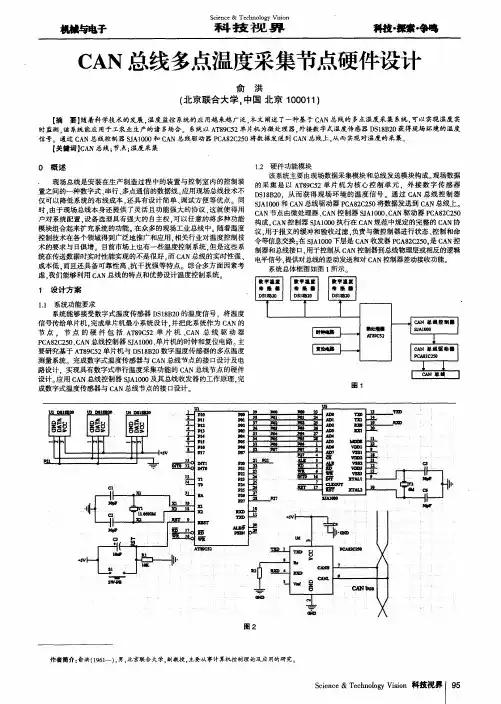
1.2 硬件功能模块
该系统主要由现场数据采集模块和总线发送模块构成。
现场数据的采集是以AT89C52单片机为核心控制单元,外接数字传感器DS18B20,从而获得现场环境的温度信号。
通过CAN总线控制器SJA1000和CAN总线驱动器PCA82C250将数据发送到CAN总线上。
CAN节点由微处理器、CAN控制器SJA1000、CAN
驱动器PCA82C250构成。
CAN控制器SJA1000执行在CAN规范中规定的完整的CAN协议,用于报文的缓冲和验收过滤,负责与微控制器进行状态、控制和命令等信息交换;在SJA1000下层是CAN收发器PCA82C250,是CAN控制器和总线接口,用于控制从CAN控制器到总线物理层或相反的逻辑电平信号,提供对总线的差动发送和对CAN控制器差动接收功能。
系统总体框图如图1所示。
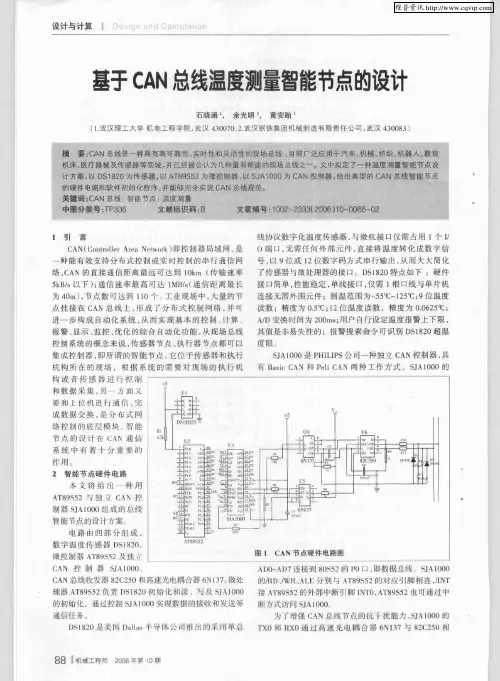
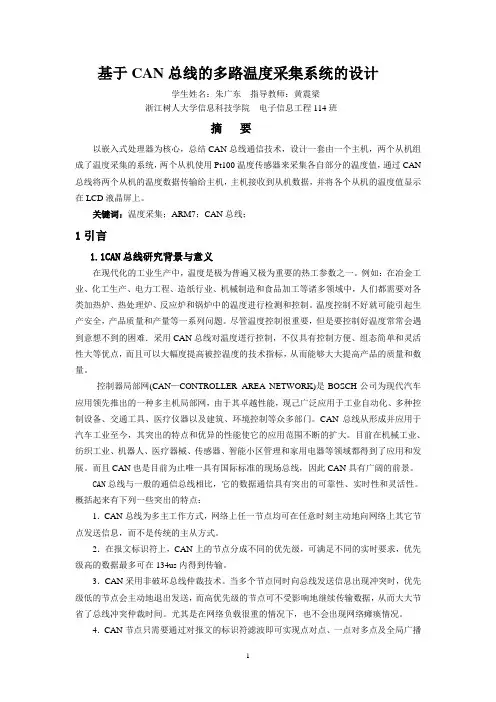
2 硬件电路设计
硬件电路的设计主要是对CAN总线控制器SJA1000和微处理器AT89C52之间以及CAN总线驱动器PCA82C250和物理总线之间接口的电路设计。
CAN 控制器SJA1000是CAN总线接口电路的核心,它主要用来完成CAN的通信协议,而CAN总线驱动器PCA82C250的主要功能是增加通信距离、提高系统瞬间抗干扰能力、保护总线、实现差分电压输出等。
温度采集电路运用的是数字式温度传感器DS18B20,它将接收到温度信号以数字量形式传送至单片机。
系统主要包括微处理器AT89C52、CAN总线控制器SJA1000、CAN总线驱动器PCA82C250和数字式温度传感器DS18B20。
电路原理图如图2所示。
3 温度传感器DS18B20工作原理
数字式温度传感器DS18B20中低温度系数晶振的振荡频率受温度影响起伏不大,它将产生的固定频率的脉冲信号传送给计数器1。
而高温度系数晶振的振荡频率受温度变化而明显改变,它将产生的固定频率的脉冲信号作为计数器2的脉冲输入。
计数器1和温度寄存器被预置在-55℃所对应的一个基数值。
计数器的作用是对低温度系数晶振产生的脉冲信号进行减法计数,当计数器1的预置值减到0时,温度寄存器的值将加1,计数器1的预置将重新被装入,计数器1重新开始对低温度系数晶振产生的脉冲信号进行计数,如此循环直到计数器2计数到0时,才停止温度寄存器值的累加,此时温度寄存器中的数值就是被测温度。
数字式温度传感器DS18B20可完成对温度的测量,以12位转化为例:用16位符号扩展的二进制补码读数形式提供,以0.0625℃/LSB形式表达,其中S 为符号位。
这是将测量的12位信号转化后得到的12位数据,存储在DS18B20的两个8比特的片内随机存取数据中。
二进制中的前面5位是符号位,如果测得的温度大于0,这5位符号位为0,将测量的数值乘以0.0625就可以得到实际温度;如果温度小于0,这5位符号位为1,将测量的数值取反加1后再乘以0.0625就可以得到实际温度。
如+125℃的数字输出07D0H,+25.0625℃的数字输出为0191H,-25.0625℃的数字输出为FF6FH,-55℃的数字输出为FC90H……最后CPU向传感器读取温度并加以处理。
4 系统调试
4.1 单片机AT89C52的调试
在硬件进行上电调试之前,应先检查电源与地之间是否存在短路或断路的现象,如果检查结果正常才可以上电。
硬件的调试应该逐个模块地进行,因为单片机是整个系统的核心,检测其是否正常工作也比较容易,所以可以先从此入手,再对其他外围器件进行调试。
判断单片机AT89C52是否工作正常很容易,我们可以不先对其相关电路进行检测,而是直接运行一些简单的测试程序,如:点亮和熄灭一个发光二极管,再让其闪烁,如果结果正常,则说明该单片机可以正常运行,如果运行不正常,则对单片机的电源、复位、时钟等各个电路的连线和相关工作模式的输入脚设置进行检查,直到单片机能正常工作为止。
通过上述的简单方法可以充分的对单片机进行调试并证明本系统使用的AT89C52单片机能正常工作。
4.2 CAN总线控制器和驱动器的调试
本系统的重点和难点是CAN总线控制器SJA1000和驱动器PCA82C250的设计,所以对这两部分的调试要分多个步骤进行。
第一,确定AT89C52单片机可以对CAN控制器SJA1000中RAM和寄存器进行正常地读写操作。
先编写一个简单的测试程序,给CAN总线控制器SJA1000的RAM或一个可读写的寄存器进行写操作,然后去读RAM或寄存器中的内容,如果读出来的数据与写入数据一致,再反复对不同的地址进行此操作,读写数据仍一致,就说明AT89C52单片机可以对CAN总线控制器SJA1000进行正常地读写操作。
第二,测试CAN 总线控制器SJA1000和驱动器PCA82C250硬件电路的设计与实现并不是太难,基本按照它们的典型接法绘制就可以了。
CAN控制器SJA1000有一种自测模式,即在数据发送时,即使没有应答也可以发送成功,所以我现用CAN总线自测模式进行调试,来检测CAN总线控制器SJA1000和驱动器PCA82C250的连线是否正确和其能否正常工作。
以这个方法为根据,若系统能发送数据,并且CAN 控制器SJA1000的状态寄存器可以接受到相应的数据,故能进行下一步的调试。
第三,当CAN总线控制器SJA1000和驱动器PCA82C250都通过自测模式调试后,就可对它们之间的通信进行调试,这里的调试程序要采用系统软件程序,并且将逐步的调试看成是整个系统程序的调试,如果它们之间的调试通过。
那么整个系统的功能基本完成。
4.3 CAN总线控制器和驱动器的调试
由于数字式传感器DS18B20的通信方式比较独特,所以本系统采用该传感器测温。
用它构建的系统具有很多优点:硬件连线较为简单,省去了使用模拟传感器要进行放大、A/D转换等工作。
因为它的级联功能,一条总线在不同位置可挂接多个传感器进行测温,每个数字式温度传感器DS18B20都有唯一的序号,以此来识别不同传感器在各自位置上的温度。
要特别注意的是,在系统安装及工作之前,要将主机依次与DS1820进行挂接,从而读出其序列号。
另外现场温度直接以“一线总线”的数字方式进行传输,每一个自带地址都大大减少了系统的电缆数并且提高了系统的稳定性和抗干扰性。
【参考文献】
[1]姜开.基于CAN总线的测试系统研究与设计[D].南京航天航空大学,2004..
[2]饶运涛,邹继军,郑勇芸.现场总线CAN原理与应用技术[M].北京:北京航空航天大学出版社,2003.
[3]张伟.基于SJA1000的CAN总线通信模块设计[J].自动化技术与应用,2007:12.
[4]谢兵.CAN总线控制器接口电路的设计[J].科技信息,2010:23.。