系统科学概论(课件整理)
- 格式:doc
- 大小:428.53 KB
- 文档页数:10
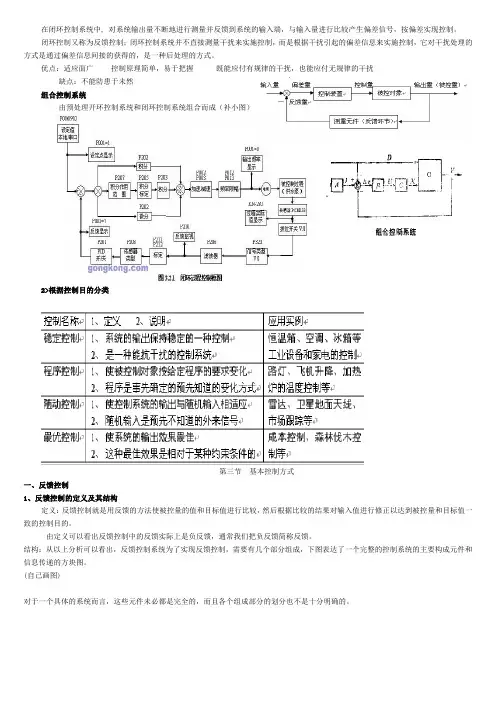
在闭环控制系统中, 对系统输出量不断地进行测量并反馈到系统的输入端,与输入量进行比较产生偏差信号,按偏差实现控制。
闭环控制又称为反馈控制;闭环控制系统并不直接测量干扰来实施控制,而是根据干扰引起的偏差信息来实施控制,它对干扰处理的方式是通过偏差信息间接的获得的,是一种后处理的方式。
优点:适应面广控制原理简单,易于把握既能应付有规律的干扰,也能应付无规律的干扰缺点:不能防患于未然组合控制系统由预处理开环控制系统和闭环控制系统组合而成(补小图)2>根据控制目的分类第三节基本控制方式一、反馈控制1、反馈控制的定义及其结构定义:反馈控制就是用反馈的方法使被控量的值和目标值进行比较,然后根据比较的结果对输入值进行修正以达到被控量和目标值一致的控制目的。
由定义可以看出反馈控制中的反馈实际上是负反馈,通常我们把负反馈简称反馈。
结构:从以上分析可以看出,反馈控制系统为了实现反馈控制,需要有几个部分组成,下图表达了一个完整的控制系统的主要构成元件和信息传递的方块图。
(自己画图)对于一个具体的系统而言,这些元件未必都是完全的,而且各个组成部分的划分也不是十分明确的。
2、反馈控制的局限性反馈控制的优点:只依据施控结果与给定目标的偏差信息来进行调节和控制,而不必事先考察可能出现的干扰因素和测量干扰的大小、强弱,从而给控制带来了很大的方便。
局限性:1>反馈过时一方面是指检测装置没有及时的检测出被控量值的变化信息并及时传递造成调节和控制过时;另一方面是控制器没有及时地依据偏差信息来实施调节和控制,从而造成的系统沿其偏差方向运行一段时间,增大偏差,降低系统稳定性。
反馈过时所造成的后果——积重难返。
与其相对应的是反馈及时,就是一旦被控量偏离目标被反馈装置及时检测出来并及时传递给控制器,控制器则及时地处理此信息并利用它及时地加以调节和控制。
2〉正反馈效应负反馈效应的获得取决于施控主体对偏差的性质和方向的判断的准确与否,调节措施得当与否。

系统科学概论一、引言系统科学是一门综合性学科,其研究范围涉及自然、社会和人类行为等多个领域。
该学科的发展历史可以追溯到20世纪初期,随着信息技术、网络技术和智能技术的不断进步,系统科学在现代社会中的应用越来越广泛。
二、系统科学的定义系统科学是一门研究复杂系统及其演化规律的综合性学科。
复杂系统指由多个相互作用且具有内部结构和功能的元素组成的系统。
系统科学主要包括以下几个方面:1. 系统理论:研究复杂系统的结构和功能,探讨各种复杂现象背后的规律和机制。
2. 系统方法:包括模型建立、仿真实验、数据分析等方法,用于对复杂系统进行分析和预测。
3. 系统工程:将系统理论和方法应用于实际工程中,设计和开发各种复杂系统,并对其进行优化。
三、系统思维1. 定义:指通过整体性思考来认识事物本质,并从整体上把握事物之间的关系。
2. 特点:系统思维具有综合性、整体性、动态性和开放性等特点。
3. 应用:系统思维被广泛应用于各个领域,如管理、决策、创新等。
四、系统分析1. 定义:指通过对系统进行分析和研究,找出其内部结构和功能,并探讨其演化规律。
2. 方法:系统分析主要包括模型建立、仿真实验和数据分析等方法。
3. 应用:系统分析可以应用于各种领域,如经济学、社会学、物理学等。
五、系统工程1. 定义:指将系统理论和方法应用于实际工程中,设计和开发各种复杂系统,并对其进行优化。
2. 过程:系统工程主要包括需求分析、设计方案确定、实施和测试等过程。
3. 应用:系统工程可以应用于各种领域,如航空航天、电子信息等。
六、信息科学与技术1. 定义:信息科学是研究信息的产生、传输和处理的一门综合性学科;信息技术是指利用计算机技术和通信技术对信息进行处理的一种手段。
2. 发展历史:信息科学与技术的发展可以追溯到20世纪50年代,随着计算机技术和通信技术的不断发展,信息科学与技术在现代社会中的应用越来越广泛。
3. 应用:信息科学与技术可以应用于各种领域,如互联网、智能家居等。

For personal use only in study and research; not for commercial use系统论、控制论和信息论是本世纪四十年代先后创立并获得迅猛发展的三门系统理论的分支学科。
虽然它们仅有半个世纪,但在系统科学领域中已是资深望重的元老,合称“老三论”。
人们摘取了这三论的英文名字的第一个字母,把它们称之为SCI论。
耗散结构论、协同论、突变论是本世纪七十年代以来陆续确立并获得极快进展的三门系统理论的分支学科。
它们虽然时间不长,却已是系统科学领域中年少有为的成员,故合称“新三论”,也称为DSC论。
“老三论”、“新三论”理论概述1、系统论、控制论和信息论系统论的创始人是美籍奥地利生物学家贝塔朗菲。
系统论要求把事物当作一个整体或系统来研究,并用数学模型去描述和确定系统的结构和行为。
所谓系统,即由相互作用和相互依赖的若干组成部分结合成的、具有特定功能的有机整体;而系统本身又是它所从属的一个更大系统的组成部分。
贝塔朗菲旗帜鲜明地提出了系统观点、动态观点和等级观点。
指出复杂事物功能远大于某组成因果链中各环节的简单总和,认为一切生命都处于积极运动状态,有机体作为一个系统能够保持动态稳定是系统向环境充分开放,获得物质、信息、能量交换的结果。
系统论强调整体与局部、局部与局部、系统本身与外部环境之间互为依存、相互影响和制约的关系,具有目的性、动态性、有序性三大基本特征。
控制论是著名数学家维纳(Wiener N)同他的合作者自觉地适应近代科学技术中不同门类相互渗透与相互融合的发展趋势而创始的。
它摆脱了牛顿经典力学和拉普拉斯机械决定论的束缚,使用新的统计理论研究系统运动状态、行为方式和变化趋势的各种可能性。
控制论是研究系统的状态、功能、行为方式及变动趋势,控制系统的稳定,揭示不同系统的共同的控制规律,使系统按预定目标运行的技术科学。
信息论是由美国数学家香农创立的,它是用概率论和数理统计方法,从量的方面来研究系统的信息如何获取、加工、处理、传输和控制的一门科学。
在闭环控制系统中, 对系统输出量不断地进行测量并反馈到系统的输入端,与输入量进行比较产生偏差信号,按偏差实现控制。
闭环控制又称为反馈控制;闭环控制系统并不直接测量干扰来实施控制,而是根据干扰引起的偏差信息来实施控制,它对干扰处理的方式是通过偏差信息间接的获得的,是一种后处理的方式。
优点:适应面广控制原理简单,易于把握既能应付有规律的干扰,也能应付无规律的干扰缺点:不能防患于未然组合控制系统由预处理开环控制系统和闭环控制系统组合而成(补小图)2>根据控制目的分类第三节基本控制方式一、反馈控制1、反馈控制的定义及其结构定义:反馈控制就是用反馈的方法使被控量的值和目标值进行比较,然后根据比较的结果对输入值进行修正以达到被控量和目标值一致的控制目的。
由定义可以看出反馈控制中的反馈实际上是负反馈,通常我们把负反馈简称反馈。
结构:从以上分析可以看出,反馈控制系统为了实现反馈控制,需要有几个部分组成,下图表达了一个完整的控制系统的主要构成元件和信息传递的方块图。
(自己画图)对于一个具体的系统而言,这些元件未必都是完全的,而且各个组成部分的划分也不是十分明确的。
2、反馈控制的局限性反馈控制的优点:只依据施控结果与给定目标的偏差信息来进行调节和控制,而不必事先考察可能出现的干扰因素和测量干扰的大小、强弱,从而给控制带来了很大的方便。
局限性:1>反馈过时一方面是指检测装置没有及时的检测出被控量值的变化信息并及时传递造成调节和控制过时;另一方面是控制器没有及时地依据偏差信息来实施调节和控制,从而造成的系统沿其偏差方向运行一段时间,增大偏差,降低系统稳定性。
反馈过时所造成的后果——积重难返。
与其相对应的是反馈及时,就是一旦被控量偏离目标被反馈装置及时检测出来并及时传递给控制器,控制器则及时地处理此信息并利用它及时地加以调节和控制。
2〉正反馈效应负反馈效应的获得取决于施控主体对偏差的性质和方向的判断的准确与否,调节措施得当与否。
如果对偏差的性质及方向判断方误,把正向偏差判断为负向的;或把负向偏差判断为正向的;或者虽则对偏差的判断准确,但采取了不得当的调节措施,反其道而行之,都会强化或扩大偏差,加剧系统的不稳定,这就是正反馈效应。
造成正反馈效应的原因有三个:第一,反馈信息失真;第三,比较器不可靠;第三,调节装置变质。
3〉反馈过度或反馈不足所谓反馈过度就是调节装置获得偏差信息后每次都做出了过头的调节,这样虽然消除了原来的偏差,却又在另一个方向上偏离了目标值产生了新的偏差。
在实际工作中,这就是矫枉过正。
反馈不足则是调节装置获得偏差信息后,每次做出的调节都太弱了,虽然对偏差有所克服,但不足以完全消除偏差4〉偏差运行惯性指施控系统及时地实施适度的反馈调节措施后,被控系统具有沿偏差方向继续运行一段时间和距离而并不马上恢复给定状态的性质。
5〉反馈滞后性任何偏差都有一个发展过程,都会经过一个潜行阶段。
在偏差运行的潜行阶段,偏差并没有明显地使被控系统的运行状态偏离目标值,这样就检测不到偏差,所以也就不能及时地依据偏差实施反馈控制,从而引起控制的滞后性,也就是说反馈控制不能防患于未然,把偏差消除在萌芽状态。
2、实施反馈控制的原则及时性原则反馈过时适度性原则反馈过度或不足准确性原则正反馈效应随机性原则随机应变能力前馈-反馈互补原则反馈滞后性二、稳定控制1、稳定控制的定义及类型稳定控制是指系统的输出保持稳定的一类控制。
说明:系统的输出实际上是指的被控量;保持稳定就是指被控量与目标值保持—致,使被控量稳定在某一稳定状态所允许的偏差范围内;稳定控制的目标值为恒值,不随时间的变化而变化。
由以上说明可以看出,稳定控制实际上就是定值控制,同时稳定控制的控制机制是反馈,通过反馈来实现其输出值得稳定,所以它是反馈控制的一种类型。
对于一个稳定控制系统,当外界环境对它没有输入时,它处于平衡稳定状态,而一旦外界环境给以输入(包括干扰),它就失去平衡,处于不稳定状态,为了再次达到稳定状态需要经过一个过度过程,称为动态过程,如图1所示:(补图)在实际稳定控制中,很难达到如图1所示的理想控制状态,大量的稳定控制尤其是那些实施动态稳定控制的过度过程其输出量变化一般表现为一个动荡过程,只不过这种动荡是减幅震荡,其振幅随时间的推移逐渐减弱并最终趋近或达到目标 值,进入稳定状态,如图2所示。
(画图)分类:一次逼近型 减幅震荡型 临界稳定型2、稳定控制的质量指标上升时间tr :指输出量第一次达到目标值的时间,表示消除偏差的速度。
它是反应调节过程快速性的一个指标,对稳定控制系统来说,tr 越短越好。
过渡过程时间ts :指系统从振荡状态进入稳定状态所需的时间,用来描述稳定控制系统的稳定速度。
对稳定控制系统来说,ts 越短越好。
超调量σp :表明系统因惯性造成的过冲现象的严重程度。
若在过渡过程中有|y (t )| 〉|J|,则:σp =(ymaxJ )/J ,其中ymax 件为y (t )的最大值,一般为第一次达到极值时地数值。
对于稳定控制系统来说,超调量越小越好。
衰减度ψ:用来描述过渡过程振荡衰减的速度,定义为ψ =(ymax - y1 ) / ymax ,其中, y1 表示ymax 出现 一个周期后y (t )的值。
对于稳定系统来说,衰减度越大越好。
稳态误差:也叫静差,指过渡过程结束后,系统进入稳定状态,但输出量仍然不能完全达到目标值所剩余的偏差,它反应了稳定控制系统稳定的精度。
稳定准确度:是指人们为了达到某一控制目的,要求稳定控制系统达到的最低稳定精度,即实现某一控制目的所允许的最大偏差范围。
对稳定控制系统来说,准确度要求高,那么系统的过渡过程就相应延长,系统也就越难稳定,若系统的准确度要求低,则系统越容易进入稳定状态。
3.应用实例稳定控制的应用相当广泛,前面我们所举的反馈控制的例子就是这方面的应用。
总之,无论是机器系统、生命有机体系统,还是社会系统,凡是涉及到需要稳定的地方,都可以使用稳定控制。
例如:液体稳压器 热机内部温度调节 部分家用电器的控制 三、程序控制和随动控制 1、程序控制的定义及类型定义:所谓程序控制就是使被控量按预先给定的方式变化。
稳定控制的目的是使被控系统的状态(被控量J)稳定在一个预先给定的不变的状态J 的周围。
J 这种状态是一种平衡态.它不随时间的变化而变化,因而在数值上J 表示一恒定的常数。
程序控制虽然也是使被控系统的状态保持在预先给定的状态y0(t )的周围,但y0(t ) 是时间的函数,随时间的变化而变化,也就是说, yy0(t )是一条预定的随时间变化的规律函数。
构成:由程序控制的定义可知,支配给定状态的规律是预先知道的,所以关于它的程序可以安置在某种存储器里,并把它连接到控制系统上就构成了程序控制系统,如图所示:(补图)分类:程序控制系统可以分为两大类:开环程序控制系统和闭环程序控制系统。
利用程序控制系统解决问题的步骤:(重要)(补图) 1〉明确所要解决的问题是否属于程序控制问题 2〉选定程序控制方式,是开环还是闭环程序控制3〉把所要解决的程序控制过程分解为前后相继的若干阶段,计算各个阶段的相关参数,编制程序 4〉设计程序控制的系统模型5〉通过模型试运行检验模型,修改模型6〉依照模型的组成元件选定构成程序控制系统的各个元件 7〉组装程序控制系统,并在实际控制中调试 8〉实施实际控制 2、程序控制应用实例开环程序控制系统存储器被控对象施控装置 y (t )ty0(t ) x 0(t ) 闭环程序控制系统存储器被控对象施控装置 y (t )ty0(t ) x 0(t ) y (t )程序控制的应用十分广泛,现代工业的流水线生产离不开程序控制;在生命系统中,程序控制也到处可见:如候鸟的迁徙,植物的生长循环等。
配钥匙矿井升降车的控制仿形车床的控制讲课3、随动控制定义:所谓随动控制,就是使被控量y(t)复制外来信号产生的状态y0(t)的变化规律,并按这个领先不能确定的、外来信号所表示的规律y0(t)来改变被控系统的状态y(t)。
通俗的说,随动控制是某种跟踪,即使系统的输出y(t)跟踪其输入y0(t),而这个输入y0(t)是事先不能确定的,是以随机方式发生的。
例如老鹰抓兔子。
与稳定控制、程序控制的区别:从定义可以看出随动控制系统要达到跟踪的目的的,必须建立反馈机制,这一点和闭环程序控制、稳定控制是没有什么区别的。
所不同的是:稳定控制的给定状态是一个恒值;程序控制的给定状态是一个事先确定的随时问变化的规律函数;而随动控制的给定状态则是一条事先不能确定的随时间变化的规律函数。
4、随动控制实例路灯开关的随动控制:路灯的开关可采用程序控制,但在季节变换对需要改变程序。
否则就会出现开灯或关灯太早或太迟的现象。
依据随动控制设计的路灯开关使得路灯能依据光照度变化来开或关,可以节省能源。
市场跟踪:根据市场需要来安排生产。
四、最优控制1、定义(重要)在控制系统中,施控主体能根据各种不同的具体情况,在可供选择的各种不同输入值的集合中,选择一个合适的输入值,以得到符合目的的输出值,也就是说,施控主体能根据预定的目的,对被控对象主动施加影响改变其输出。
一个输入值选定后,就会有一个确定的输出值和它对应,如果在所有可能的输出值中存在一个相对于某种尺度来说是最好的,那么获得这个最好输出值所实施的控制就是最优控制。
2、最优控制的应用最优控制常用来实现某种最优过程,寻求某种最优策略或对策,通常用数学方法中的动态规划技术来实现。
所谓动态规划就是把一个给定的动态过程划分成许多阶段,从而有序的加以解决的方法,其核心理论是贝尔曼最优化原理,又称多段决策最优化理论,它把动态过程归结为一个基本的递推关系式,从整个过程的终点出发由后向前推移,一步一步地推到过程的始点,从而找到最优解。
1〉寻求最短邮路(补图)如图所示,邮递员要从S点把信送到E点,途经A、B、C各点,其路线及相应两点间的距离如图中所示。
求S到E的最短邮路。
按照动态规划方法,可把此过程分为置S到A、A到B、B到C、C到E四个阶段,我们从终点E开始向始点S推移求最优解。
(1)第四阶段,从C点到E点:(补图)(2)第三阶段,从B点到E点:(补图)(3)第二阶段,从A点到E点:(补图)(4)第一阶段,以S为起点:(补图)于是求得最短邮路为S—A2—B2—C1—E,总距离为14时邮寄员最省时。
2〉寻求最优策略多用于资源限制的养殖问题,牲畜存栏,森林伐木的有效计算,其主要思想就是尽可能使系统满负荷的运转。
3〉实现最优过程与最优策略的区别是最优策略是满负荷运转到系统的结束,而最优过程还要回到系统的原状态,所以从某种意义上来说,它是双向的最优策略。
例如矿井升降车,设井深S=30米,升降机的最大运动速度为V=1M/s,最大加速度为a1=0.2m/s2,最大减速度为a2=0.4m/s2。