机械设计基础[1]
- 格式:ppt
- 大小:866.00 KB
- 文档页数:25
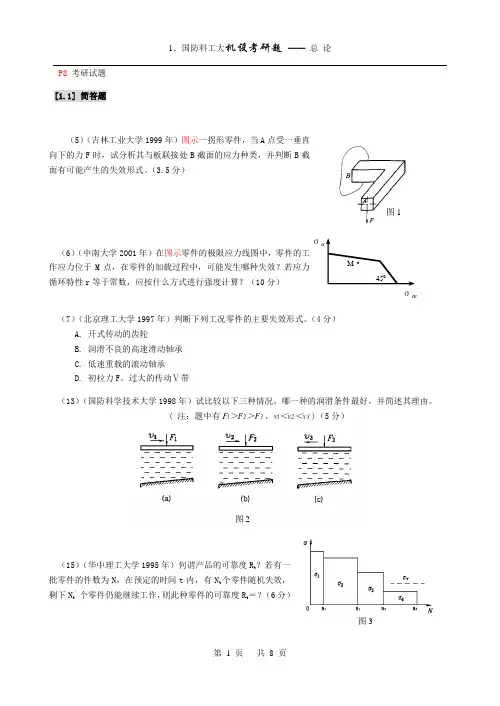
P8 考研试题[1.1] 简答题(5)(吉林工业大学1999年)图示一拐形零件,当A 点受一垂直向下的力F 时,试分析其与板联接处B 截面的应力种类,并判断B 截面有可能产生的失效形式。
(3.5分)图1(6)(中南大学2001年)在图示零件的极限应力线图中,零件的工作应力位于M 点,在零件的加载过程中,可能发生哪种失效?若应力循环特性r 等于常数,应按什么方式进行强度计算?(10分)(7)(北京理工大学1997年)判断下列工况零件的主要失效形式。
(4分)A. 开式传动的齿轮B. 润滑不良的高速滑动轴承C. 低速重载的滚动轴承D. 初拉力F 。
过大的传动Ⅴ带(13)(国防科学技术大学1998年)试比较以下三种情况,哪一种的润滑条件最好,并简述其理由。
( 注:题中有F l >F 2>F 3 ,v l <v 2<v 3 )(5分)图2(15)(华中理工大学1995年)何谓产品的可靠度R t ?若有一批零件的件数为N ,在预定的时间t 内,有N t 个零件随机失效,剩下N t ’个零件仍能继续工作,则此种零件的可靠度R t =?(6分)图3σσm(20)(模拟)机械零件设计计算准则与失效形式有什么关系?有哪些常用的计算准则?它们是针对什么失效形式建立的?(22)(模拟)什么是静载荷、变载荷,静应力和变应力?试举出两个机械零、部件在工作时受静载荷作用而产生变应力的例子。
(23)(模拟)作用在机械零件上的变应力有哪几种类型?如何区分它们?(25)(模拟)怎样区分表面挤压应力和表面接触应力?试说明两圆柱体接触应力计算公式2111ρρπσ±⋅=L F Z n E H 中各符号的意义。
(27)(模拟)试根据材料的疲劳曲线(σ-N 曲线),说明什么叫循环基数N 0、条件疲劳极限σrN 和疲劳极限σr ,并根据疲劳曲线方程导出σrN 的计算式。
(28)(模拟)试述金属材料的疲劳断裂过程。
*(29)(摸拟)影响机械零件疲劳强度的主要因素有哪些?原因是什么?为什么影响因素中的K σ、εσ、β只对变应力的应力幅部分有影响?*(30)(模拟)零件设计中常见的有哪些应力集中源?若零件危险剖面上有几个应力集中源,在疲劳强度计算中应如何考虑K σ(K τ)对零件疲劳强度的影响?试比较形状、尺寸一致,工作条件相同,分别用铸铁、低碳钢、高强度钢制造的三个零件,哪一个的K σ(K τ)数值最大?哪一个的K σ(K τ)数值最小?在设计零件选用材料时如何考虑这些问题?(31)(模拟)如何绘制考虑K σ、εσ、和β影响的极限应力图?它有何用途?(34)(模拟)何谓摩擦?常见的摩擦(润滑)状态有哪几种?各有何特点?试画出各种摩擦(润滑)状态的几何形貌图。
《机械设计基础1》期末复习填空题1.机械是机器和机构的统称。
2.从制造的角度看,机器是由若干个零件装配而成;从运动的角度看,机器是由若干个运动的单元所组成,这种运动单元称为构件。
3.平面任意力系向一点简化可得到一个与简化中心无关的力偶和一个与简化中心有关的力。
4.在平面力系中各力的作用线全部汇交于一点,那么称此力系为平面汇交力系。
5.在平面力系中各力的作用线既不汇交于一点,相互间也不全部平行,那么称此力系为空间力系。
6.零件产生剪切变形时,一般都伴随着挤压变形,即联接件的接触面发生压陷现象。
7.梁的三种基本形式为简支梁、外伸梁、悬臂梁。
8.利用材料的强度条件,可以解决三大类工程实际问题:校核强度、求最小截面尺寸(截面尺寸设计)、确定许用载荷。
9.平面高副是两构件以点或线接触构成的运动副,它给构件的相对运动引入一个约束条件;平面低副是两构件以面接触构成的运动副,它给构件的相对运动引入两个约束条件。
10.若平面四杆机构中的运动副都是转动副时,称为铰链四杆机构,根据其两两连架杆运动形式的不同有三种基本形式,分别是曲柄摇杆机构、双曲柄机构和双摇杆机构。
11.轴向拉伸和压缩时,内力垂直于横截面并通过其形心,所以内力称为轴力。
12. 单位长度上的绝对变形称之为 相对变形或线应变 。
13. 塑性金属材料的极限应力是σs ,称为 许用应力 。
14. 剪力是剪切面上 分布内力 的合力。
15. 扭转变形的受力特点是:垂直于轴线的平面受到 大小相等 、 方向相反 的两个力偶作用。
16. 杆件各横截面绕轴线发生相对转动,这种变形称之为 扭转变形 。
17. 由轴传递的功率和转速,通过公式计算作用于轴上的外力偶矩。
18. 作用在轴上的外力是力偶,横截面上内力偶与之平衡,内力偶之矩称为 扭矩 。
19. 杆件的基本变形有:拉压变形,剪切变形、和 扭转变形 。
单选题1. 圆轴扭转剪应力 C 。
A. 与扭矩和极惯性矩都成正比;B. 与扭矩成反比,与极惯性矩成正比C. 与扭矩成正比,与极惯性矩成反比;D. 与扭矩和极惯性矩都成反比2. 插销穿过水平放置的平板上的圆孔(如右图),在其下端受有拉力P 。
![(整理)机械设计基础试题[1]](https://uimg.taocdn.com/691a0eb980eb6294dd886c77.webp)
试题一一 .填空1.一平面铰链四杆机构的各杆长度分别为a=350,b=600,c=200,d=700; (1) 当取c 杆为机架时,它为何种具体类型?____双曲柄机构_______;(2)当取d杆为机架时,则为_____曲柄摇杆机构______。
2.曲柄摇杆机构中,摇杆为主动件时,____曲柄与连杆共线时为_____死点位置。
(A)不存在(B)曲柄与连杆共线时为(C)摇杆与连杆共线时为3.为保证四杆机构良好的机械性能,______传动角_____不应小于最小许用值。
(A)压力角(B)传动角(C)极位夹角4.____ 凸轮轮廓曲线_______决定了从动杆的运动规律。
(A)凸轮转速(B)凸轮轮廓曲线(C)凸轮形状5.凸轮机构中,凸轮基圆半径愈_____大______,压力角愈_____小___ ,机构传动性能愈好。
6.紧键联接与松键连联接的主要区别在于:前者安装后,键与键槽之间就存在有____摩擦力_______。
(A) 压紧力 (B) 轴向力 (C) 摩擦力7.链“B18X80”的含义是___B型键宽度b=18mm,长度L=80mm _______。
8.螺纹联接是指利用螺纹零件把需要固定在一起的零件固连起来___。
螺旋传动是指__利用螺纹零件实现回转运动转换成直线运动________。
9.螺纹的公称直径是指它的____外径___,螺纹“M12X1.5”的含义为_细牙螺纹外径12mm,螺距1.5____。
10.采用螺纹联接时,若被联接件总厚度较大,切材料较软,在需要经常装卸的情况下,宜采用_________双头螺栓联接______________。
用于薄壁零件联接的螺纹,宜采用_________三角形细牙螺纹______________。
(A) 螺栓联接 (B) 双头螺栓联接 (C) 螺钉联接 (D) 三角形细牙螺纹(E) 三角形粗牙螺纹 (F) 矩形螺纹11.某调整螺纹,采用双头粗牙螺纹,螺距为3mm,为使螺母相对螺杆沿轴向移动12mm,则螺杆应转____2_____圈。
机械设计基础课后答案1练习题答案第⼀章平⾯连杆机构1-1 什么叫曲柄?在铰链四杆机构中,曲柄的存在条件是什么?曲柄是否⼀定是最短杆?答:⑴能绕固定铰链中⼼作整周转动的连架杆称为曲柄。
⑵曲柄存在的条件:①、最短杆和最长杆的长度之和⼩于或等于其它两杆长度之和;②、最短杆或其临杆做机架。
⑶曲柄不⼀定是最短杆。
(当满⾜条件1时并最短杆作机架时,曲柄为最短杆的两个临杆) 1-2 铰链四杆机构⽤不同的杆长组合并通过构件位置的倒置会得到哪些类型的机构?试填在下表中。
1-3 什么叫摆⾓?什么叫极位夹⾓?什么叫⾏程速⽐系数?前两者之间有怎样的关系?后两者之间⼜有怎样的关系?答:⑴在曲柄摇杆机构中,取曲柄为主动件,在曲柄转动⼀周的过程中,有两次与连杆共线,这时的摇杆分别摆⾄左、右两极限位置。
摇杆两极限位置间的夹⾓称作摇杆的摆⾓。
⑵对应于摇杆处于两极限位置时,曲柄两位置直线间所夹的锐⾓,称为极位夹⾓。
⑶ ()()θ-180θ+180/ωθ+180C C /ωθ-180C C /t C C /t C C V V 0002101212121212====线速度从动件⼯作⾏程的平均线速度从动件返回⾏程的平均⾏程速⽐系数⑷极位夹⾓和摆⾓的⼤⼩取决于机构中的杆长关系。
摆⾓越⼤,极位夹⾓越⼤。
⑸极位夹⾓极位夹⾓⾏程速⽐系数-180+18000== 1-4 曲柄滑块机构是怎样演化为偏⼼轮机构的?这种演化机构有何优点?答:当曲柄的实际尺⼨很⼩但传递动⼒较⼤时,通常将曲柄做⼀圆盘,圆盘的⼏何中⼼为B (亦即圆盘与连杆2的铰接中⼼),B 与圆盘⾃⾝的回转中⼼A 的距离就是曲柄AB 的长度,这时的机构称为偏⼼轮机构。
这种演化机构的优点:既减少了加⼯程序,⼜提⾼了曲柄的强度和刚度。
1-5 何谓机构的急回特性?机构具有急回特性的特征是什么?并分析K值⼤⼩对机构⼯作的影响。
答:当曲柄等速转动时,摇杆往返摆动的速度其值不相同,返回时速度较⼤。
从动件这种返回⾏程的速度⼤于⼯作⾏程速度的性质,称为机构的急回特性。
机械设计基础课程形成性考核作业(一)第1章静力分析基础1.取分离体画受力图时,_CEF_力的指向可以假定,_ABDG_力的指向不能假定。
A.光滑面约束力B.柔体约束力C.铰链约束力D.活动铰链反力E.固定端约束力F.固定端约束力偶矩G.正压力2.列平衡方程求解平面任意力系时,坐标轴选在_B_的方向上,使投影方程简便;矩心应选在_FG_点上,使力矩方程简便。
A.与已知力垂直B.与未知力垂直C.与未知力平行D.任意E.已知力作用点F.未知力作用点G.两未知力交点H.任意点3.画出图示各结构中AB构件的受力图。
4.如图所示吊杆中A、B、C均为铰链连接,已知主动力F=40kN,AB=BC=2m,α=30︒.求两吊杆的受力的大小。
解:列力平衡方程:又因为 AB=BC第2章常用机构概述1.机构具有确定运动的条件是什么?答:当机构的原动件数等于自由度数时,机构具有确定的运动。
2.什么是运动副?什么是高副?什么是低副?答:使两个构件直接接触并产生一定相对运动的联接,称为运动副。
以点接触或线接触的运动副称为高副,以面接触的运动副称为低副。
3.计算下列机构的自由度,并指出复合铰链、局部自由度和虚约束。
(1)n=7,P L=10, P H=0F=3n-2 P L–P H=3×7-2×10=1C处为复合铰链(2)n=5,P L=7, P H=0F=3n-2 P L–P H=3×5-2×7=1(3)n=7,P L=10, P H=0F=3n-2 P L–P H=3×7-2×10=1(4)n=7,P L=9, P H=1F=3n-2 P L–P H=3×7-2×9-1=2E、E´有一处为虚约束F为局部自由度C处为复合铰链第3章平面连杆机构1.对于铰链四杆机构,当满足杆长之和的条件时,若取_C为机架,将得到双曲柄机构。
A.最长杆B.与最短杆相邻的构件C.最短杆D.与最短杆相对的构件2.根据尺寸和机架判断铰链四杆机构的类型。