CDT规约介绍
- 格式:ppt
- 大小:937.00 KB
- 文档页数:20

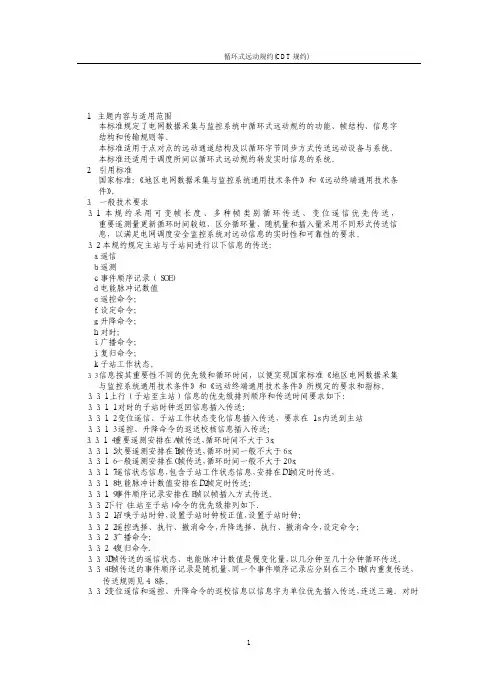
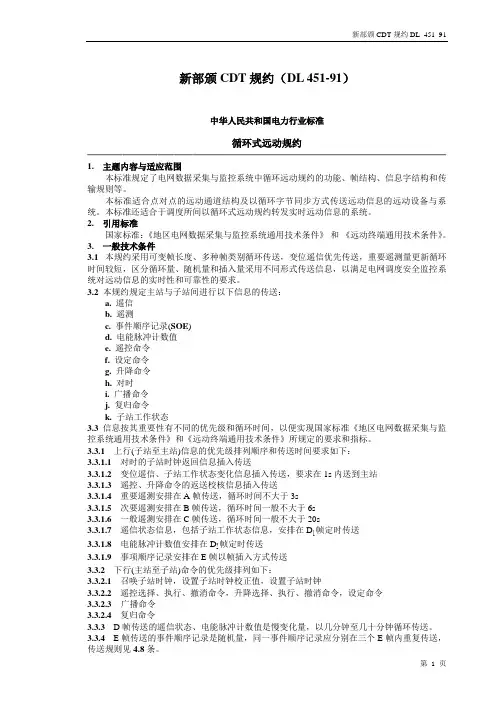
新部颁CDT规约(DL 451-91)中华人民共和国电力行业标准循环式远动规约─────────────────────────────────────────1. 主题内容与适应范围本标准规定了电网数据采集与监控系统中循环远动规约的功能、帧结构、信息字结构和传输规则等。
本标准适合点对点的远动通道结构及以循环字节同步方式传送远动信息的远动设备与系统。
本标准还适合于调度所间以循环式远动规约转发实时远动信息的系统。
2. 引用标准国家标准:《地区电网数据采集与监控系统通用技术条件》和《远动终端通用技术条件》。
3. 一般技术条件3.1 本规约采用可变帧长度、多种帧类别循环传送,变位遥信优先传送,重要遥测量更新循环时间较短,区分循环量、随机量和插入量采用不同形式传送信息,以满足电网调度安全监控系统对远动信息的实时性和可靠性的要求。
3.2 本规约规定主站与子站间进行以下信息的传送:a. 遥信b. 遥测c. 事件顺序记录(SOE)d. 电能脉冲计数值e. 遥控命令f. 设定命令g. 升降命令h. 对时i. 广播命令j. 复归命令k. 子站工作状态3.3 信息按其重要性有不同的优先级和循环时间,以便实现国家标准《地区电网数据采集与监控系统通用技术条件》和《远动终端通用技术条件》所规定的要求和指标。
3.3.1 上行(子站至主站)信息的优先级排列顺序和传送时间要求如下:3.3.1.1对时的子站时钟返回信息插入传送3.3.1.2 变位遥信、子站工作状态变化信息插入传送,要求在1s内送到主站3.3.1.3遥控、升降命令的返送校核信息插入传送3.3.1.4重要遥测安排在A帧传送,循环时间不大于3s3.3.1.5 次要遥测安排在B帧传送,循环时间一般不大于6s3.3.1.6 一般遥测安排在C帧传送,循环时间一般不大于20s3.3.1.7遥信状态信息,包括子站工作状态信息,安排在D1帧定时传送3.3.1.8电能脉冲计数值安排在D2帧定时传送3.3.1.9事项顺序记录安排在E帧以帧插入方式传送3.3.2 下行(主站至子站)命令的优先级排列如下:3.3.2.1 召唤子站时钟,设置子站时钟校正值,设置子站时钟3.3.2.2遥控选择、执行、撤消命令,升降选择、执行、撤消命令,设定命令3.3.2.3广播命令3.3.2.4 复归命令3.3.3D帧传送的遥信状态、电能脉冲计数值是慢变化量,以几分钟至几十分钟循环传送。
cdt规约解析-回复CDT(Contract Design Tool)规约解析是指对CDT规约进行详细解读和解析的过程。
CDT是一种基于区块链技术的智能合约规约,它允许开发者使用一套高级编程语言及开发工具创建和部署智能合约。
CDT规约解析的目的是帮助开发者理解CDT规约的各个方面,提供清晰的指南和示例,并解答可能遇到的问题。
第一步:理解CDT规约的基本概念和架构CDT规约是一个包含一组规则和规范的文件,用于定义智能合约的结构、属性和行为。
它可以被看作是一种“合约编程语言”,具有自己的语法和语义。
CDT规约是建立在区块链技术上的,它通过智能合约的方式实现了不需要第三方中介的可信交易。
CDT规约的架构通常由以下几个部分组成:1. 数据类型:CDT规约可以定义各种不同的数据类型,包括整型、字符串、数组等。
这些数据类型可以在智能合约中进行定义和使用。
2. 变量和函数:CDT规约允许开发者声明和使用变量,以及定义和调用函数。
变量可以用来存储智能合约中的状态信息,函数可以用来执行各种操作。
3. 条件逻辑和循环:CDT规约支持条件语句和循环语句,开发者可以使用它们来编写更复杂的智能合约逻辑。
4. 事件和触发器:CDT规约允许开发者定义和触发事件,这些事件可以在智能合约执行过程中被捕捉和处理。
触发器可以是外部事件(如用户输入)或内部事件(如合约状态改变)。
5. 安全性和权限:CDT规约提供了一些机制来确保智能合约的安全性和权限管理。
开发者可以定义权限控制规则,限制对合约的访问和操作。
第二步:详细解析CDT规约的语法和语义在第一步之后,我们需要仔细解析CDT规约的语法和语义。
这包括了对CDT规约中各个关键词、操作符和语句的解释和说明。
我们需要理解每个关键词、操作符和语句的作用和用法,并且了解它们之间的关系和限制。
在语法解析的过程中,我们需要注意以下几个方面:1. 语法结构:CDT规约是由多个语句构成的,每个语句由一行或多行组成。
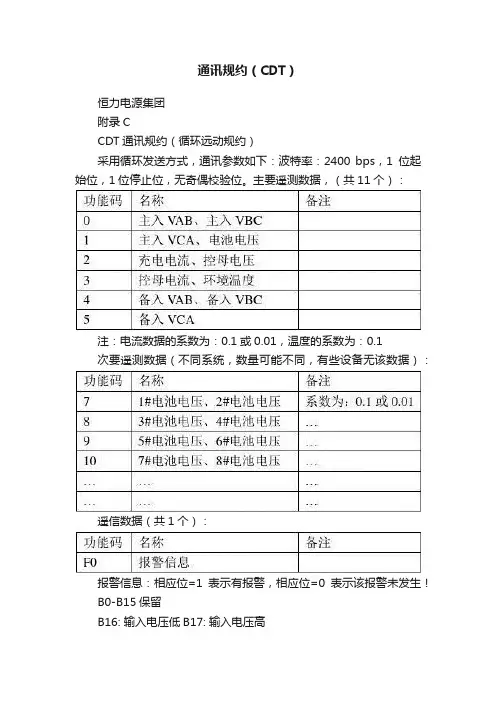
通讯规约(CDT)
恒力电源集团
附录C
CDT通讯规约(循环远动规约)
采用循环发送方式,通讯参数如下:波特率:2400 bps,1位起始位,1位停止位,无奇偶校验位。
主要遥测数据,(共11个):
注:电流数据的系数为:0.1或0.01,温度的系数为:0.1
次要遥测数据(不同系统,数量可能不同,有些设备无该数据):
遥信数据(共1个):
报警信息:相应位=1表示有报警,相应位=0表示该报警未发生!
B0-B15保留
B16: 输入电压低B17: 输入电压高
B18: 电池电压低B19: 电池电压高
B20: 电池充电过流B21: 控制母线电压低B22: 控制母线电压高B23: 控制母线过流B24: 控制母线绝缘不良B25: 模块温度高B26: 旁路电压低B27: 旁路电压高
B28: 主入缺相B29: 备入缺相
B30: 单只电池电压低B31: 单只电池电压高具体信息格式如下:
次要遥测量发送信息为:(共计66个字节),共9信息桢,每桢包含两只单只电池电压。
低位在前,高位在后。
数据需要除10。
同步字控制字
遥信状态:(共计24个字节)。
cdt规约概念
CDT(Common Development and Distribution License)是一种开源软件许可协议,它是从Sun公司的CDDL(Common Development and Distribution License)发展而来。
CDT协议主要用于保护开源软件的作者和使用者的权益,同时也鼓励开发者共享和改进代码。
CDT规约包括以下几个主要概念:
1. 授权:CDT允许开发者自由地使用、复制、分发和修改受许可的软件。
这意味着任何人都可以使用CDT许可的软件进行商业和非商业用途。
2. 源代码发布:根据CDT规约,如果你对软件进行了修改或扩展,则必须发布修改后的源代码。
这样其他人就能够查看和改进你的代码。
3. 派生作品授权:CDT规约还要求在派生作品中使用相同的CDT 许可证,并且要保留原始软件的版权声明和许可声明。
4. 分发条款:CDT规约要求在分发软件时提供软件的完整版权声明和许可声明,并且明确标明哪些部分是修改过的。
5. 免责条款:CDT规约明确声明作者不对软件的适用性或特定用途的错误承担责任。
总之,CDT规约是一种开源软件许可协议,旨在促进开发者之间的合作和共享,同时保护软件作者和使用者的权益。
它要求开发者在修改或分发软件时遵守一定的规定,以确保开源软件的自由传播和持
续改进。
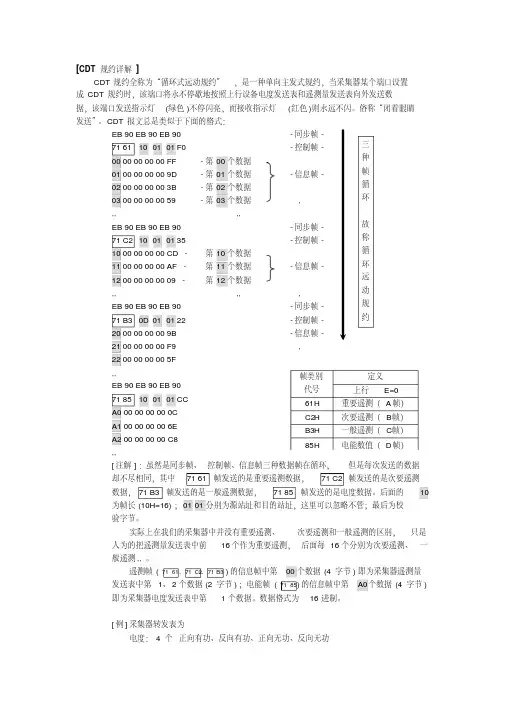
CDT规约报文解释CDT是电力系统部颁远动通讯规约的一种,此外还有Polling规约(包括U4f,1841等)。
CDT是循环发送方式,即从站始终按一定的组帧格式将遥测、遥信、电度、SOE等信息循环发送到主站端。
Polling规约则采用问答式通讯方式。
FIX好像没有CDT的驱动,在工程中需要用CDT规约与主站或从站通讯时,是采用自己开发的一个后台运行的CDT程序,利用EDA读写FIX的实时数据点实现。
CDT规约报文解释(例)有如下报文:eb 90 eb 90 eb 9071 61 14 02 01 6400 00 00 00 00 ff01 00 00 00 00 9d02 00 00 00 00 3b03 00 00 00 00 5904 00 00 6e 00 5305 6f 00 0a 00 17eb90为同步字3遍71 61 14 02 01 64为控制字:71为控制字节,61为帧类别,这里指遥测14为信息字数00~14,02为源站址(厂站),01为目的站址(主站),64为校验码。
**********************遥测*********************00 00 00 00 00 ff01 00 00 00 00 9d02 00 00 00 00 3b03 00 00 00 00 5904 00 00 6e 00 5305 6f 00 0a 00 17以上列出的是前5个信息字,每个信息字中第1字节代表功能码(00~7F为遥测,共128个),第2、3字节、4、5字节分别表示一路遥测,第6字节为校验码,00~7F共可传256个遥测,以上报文,遥测号0~8 遥测值为0,如果每路遥测两个字节,低字节在前,高字节在后,那么第9个遥测原码为00 00 也就是十进制的0第10个遥测原码为00 6e也就是十进制的110第12个遥测原码为00 0a 也就是十进制的10用每个遥测十进制原码,乘以遥测系数,就可以得到一次值了。
CDT规约报文介绍远动规约的目的就是把子站的信息提供给远方的调度中心,目前常用的规约有:部颁CDT、IEC101、DNP、SC1801,104等.下面主要介绍CDT规约与大家交流. CDT 规约是以子站数据循环上送,同时重要的数据采用插桢的方式上送,其主动权在子站端.CDT的桢结构为:同步字+控制字+信息体同步字为: eb 90 eb 90 eb 90控制字为: XX XX(表示桢的类别如遥测,遥信等), XX(信息字数),源地址(子站地址),目的地址(主站地址),CRC信息体为:功能码, 数据码4个字节, 校验码CRC1:全YX控制字的桢类别为: 71 f4信息体的功能码为: f0—ff 每个功能码上送 32 个 YX 量,则部颁 CDT 的上送YX 容量为:32*16=512,f0上送组态里的1-32个遥信的状态,f1上送33-64个遥信的状态,以此类推.报文:eb 90 eb 90 eb 9071 f4 10 01 64 d4 (全YX)f0 00 00 00 00 f6 f1 00 60 38 1c 54 f2 00 00 00 02 3c f3 64 00 0000 5d f4 02 84 a5 c1 e5 f5 02 00 05 05 6d f6 05 05 00 01 34 f7 0505 05 05 0b f8 05 05 04 41 f5 f9 38 d0 00 20 5b fa 00 00 00 00 2b fb00 00 00 00 49 fc 00 00 00 00 60 fd 00 58 02 90 a4 fe 40 05 00 04 e3 ff 00 02 00 12 6e以f1 00 60 38 1c 54为例,f1上送33-64个遥信的状态.00表示33-40个遥信 0 (yx40)0 0 0 0 0 0 0 (yx33) 低位在前高在后!! (16进制转4位2进制)60表示41-48个遥信 0(yx48)110 0000(yx41) 则表示46和47个遥信的状态是合的2:全YC控制字的桢类别为: 71 61(我们在组态一般用的是重要遥测)信息体的功能码为: 00—7f 每个功能码上送二个遥测量,则部颁 CDT 的上送遥测容量为: 128*2=256, 00上送组态里的1-2个遥测量,以次类推.一路遥测由二个字节组成,根据规约定义: b15为数据有无效位 b14为数据有无溢出位,b13-b12未定义, b11为符号位, b10- b0为传输的量,则最大值为 0000 0111 1111 1111 为7ff即2047.报文:eb 90 eb 90 eb 9071 61 20 01 64 2d (上送重要遥测,功能码个数为32个,则上送了64个遥测量) 00 e5 03 e7 03 49 01 e7 03 00 00 26 02 c1 06 00 00 fa 03 00 00 00 0059 04 00 00 00 00 70 05 a9 06 00 00 36 06 97 00 98 00 c9 07 95 00 0000 ce 08 6f 0f cd 0f 0f 09 b7 09 87 00 99 0a 84 00 85 00 bc 0b 0000 d2 0f fd 0c f8 0f 6c 09 ab 0d 00 00 00 00 0b 0e 00 00 00 00 ad 0f 00 00 cb 06 a7 10 fe 0f 5d 03 a1 11 53 03 4b 03 11 12 4a 03 e4 00a4 13 cb 06 6e 06 07 14 d9 03 da 03 a5 15 dc 03 ab 06 25 16 0000 03 00 b9 17 00 00 ff 0f 1e 18 00 00 56 09 99 19 db 03 dc 03 03 1a dd 03 af 06 57 1b ab 03 15 00 ac 1c a9 03 69 02 f9 1d 74 00 8b06 60 1e 83 04 82 04 bf 1f 85 04 0e 00 ff以00 e5 03 e7 03 49为例,表示上送组态里的遥测1和2,其中e5 03表示遥测1, e7 03表示遥测2.上送的是源码值,要转换成实际值则要主站乘上相应的系数即可.设遥测1为400/5的IA,则系数为1.2*400/2047= 0.23448则IA=( hex 03 e5)* 0.23448=233.77656A03 e5=0000 0011 1110 0101=512+256+128+64+32+4+1=997997*0.23448=233.776563:上送SOE控制字的桢类别为: 71 26功能码为: 80 81报文:eb 90 eb 90 eb 9071 26 02 01 64 4180 85 02 23 38 f881 0a 15 ca 01 9c其中 80: 85 02 表示 02 85 即285ms 23 表示 23秒 38表示38分81: 0a 表示10点 15表示21号 ca 01 解释为 01 ca 转为二进制为: 0(状态位) 000 0001 1100 1010 (在组态的点号=458)则可以解释为: 组态里458点遥信在21号10点38分23秒285毫秒时状态变“分”4:YK过程YK过程为: 主站YK预选------收到YK返校后--------YK执行或YK撤销YK预选格式为:eb 90 eb 90 eb 9071 61 03 01 0b d9 (YK预选)e0 cc 1f cc 1f 2f (cc表示遥控合 1f表示遥控序号第31个遥控)e0 cc 1f cc 1f 2fe0 cc 1f cc 1f 2fYK返校格式为:e1 cc 1f cc 1f 4de1 cc 1f cc 1f 4de1 cc 1f cc 1f 4d遥控和升降命令的返校信息连续插送三遍, 且遥控和升降命令的返校信息连续插送三遍必须在同一帧内.。
DL451-91(CDT)通讯规约采用RS232通讯接口;波特率支持1200、2400、4800、9600,字符格式10位(1位起始位、8位数据、1位停止位)。
1.帧定义1.1.帧结构1.2.同步字发送:EBH 90H EBH 90H EBH 90H,共6个字节。
控制字控制字共有B7 – B12 共6个字节,定义如下:1.2.1.控制字节E:扩展位,E=0 表示使用本协议已定义帧类别码,E=1帧类别码可自定义,本协议中总为0L:帧长定义位,E=0 表示本帧无信息字,E=1 表示本帧有信息字,本协议中总为1 S:源站地址有效D:目的站地址有效(上行信息中,S=1,D=1,源站地址为直流设备设置地址,目的站地址为上位机地址,固定为01H。
)(下行信息中,D=1, 目的站地址为直流设备设置地址)1.2.2.帧类别码1.2.3.信息字数n表示该帧中所含信息字数量;n=0表示本帧无信息。
1.2.4.校验码本协议采用CRC校验,校验多项式为107H,为信息字前5字节构成码流,后面加8个0,得到48位码流,用校验多项式作为除数除以码流,相除时做异或;最后得到8位余数取反后既为校验码。
例如:信息字为;43h E8h 7DH 33H 56H 计算余数为2FH,取反后为D0H,发送序列为:43h E8h 7DH 33H 56H D0H。
校验程序实例:unsigned char CRC(unsigned char *buff,int len)•{•int q=0,r=0;•int crc=0;•int i;•while(q<len)•{•if(buff[q]&(0x80>>r))•crc|=0x01;•if(crc>=0x100)•crc^=0x107;•crc<<=1;•r++;• if(r==8)• {•r=0;•q++;• }•}•for(i=0;i<8;i++)•{• if(crc>=0x100)• crc^=0x107;• crc<<=1;•}• crc>>=1;• crc=(~crc);•return (unsigned char)crc;•}1.3.信息字1.3.1.信息字结构每个信息字由6个字节构成:功能码1字节,信息4字节,校验码1字节。
cdt规约解析?
答:CDT规约,全称为“循环式远动规约”,是一种在电网数据采集与监控系统中使用的通信规约。
它规定了循环式远动规约的功能、帧结构、信息字结构和传输规则等内容。
CDT规约主要适用于点对点的远动通道结构,以及采用循环字节同步方式传送远动信息的远动设备与系统。
这种规约也可以用于调度所间以循环式远动规约转发实时远动信息的系统。
CDT规约的特点包括:
1.可变帧长度:CDT规约允许帧长度可变,这使得它能够适应不同长度的数据传输需求。
2. 多种帧类别循环传送:CDT规约定义了多种帧类别,这些帧类别会按照一定的顺序循环传送,确保数据的实时性和准确性。
3.变位遥信优先传送:在CDT规约中,当发生变位遥信时,会优先传送这些变位信息,以确保重要信息的及时传递。
4.重要遥测量更新循环时间较短:CDT规约对于重要遥测量的更新循环时间较短,这有助于及时反映电网的实时状态。
5.区分循环量、随机量和插入量:CDT规约采用不同的形式传送循环量、随机量和插入量,以确保数据的正确性和可靠性。
在解析CDT规约时,需要了解其基本格式和传输规则。
通常,CDT报文由同步字、控制字、信息字等部分组成。
同步字用于标识报文的开始和结束,控制字则包含了报文的控制信息,如源站址、目的站址等。
信息字则包含了实际的数据内容。
在解析过程中,需要根据同步字和控制字的信息来正确解析出数据内容,并进行相应的处理。
一、CDT规约1.CDT规约的传送内容a.遥信b.遥测c.事件顺序记录(SOE)d.电能脉冲记数值e.遥控命令;f.设定命令;g.升降命令;h.对时;i.广播命令;j.复归命令;k.子站工作状态。
2.CDT规约帧结构同步字目前有两种,分别是:a.EB 90 EB 90 EB 90b.D7 09 D7 09 D7 09控制字因传送内容、传送方向不同而意义有所不同。
在我们调试过程中,一般是通过我公司的通信管理器向对方调度发送遥信、遥测、SOE、电度报文等。
这里就我们称调度侧为主站,变电站侧为子站。
当子站向主站发送信息时称为上行,当主站向子站发送信息称为下行。
71 61 05 01 01 92(重要遥测报文帧的控制字)其中:71 是控制字节61 是帧类别,表示该帧传送的是重要遥测帧05 是信息字数,表示一共发送了5组重要遥测,每组两个遥测量。
01 是源站地址,在实际使用中一般是发送的一方,如通信管理器向调度发送报文01 是目的地址,在实际使用中一般是接收的一方,如通信管理器接收直流屏的报文92 是校验码信息字用来表示传送的相关量的状态和数值。
CDT报文的具体格式请参加附件。
3.实际报文举例EB 90 EB 90 EB 90 ------------同步字71 61 05 01 01 92 ------------控制字,5组重要遥测,低位在前,高位在后00 00 00 74 00 09 ------------信息字1,第一组遥测,码值为0000,007401 6F 28 01 28 C5 -----------信息字2,第二组遥测,码值为286F,280102 56 28 DC 00 E7 -----------信息字3,第三组遥测,码值为2856,00DC03 60 00 00 00 0C ------------信息字4,第四组遥测,码值为0060,000004 00 00 00 00 70 -------------信息字5,第五组遥测,码值为0000,0000同理:EB 90 EB 90 EB 90 ------------同步字,低位在前,高位在后71 F4 01 01 01 21 ------------控制字,一组遥信,32个遥信量71 C2 04 01 01 35 ---------------次要遥测00 00 00 00 00 37 ---------------第一组遥测01 00 00 00 00 55 ---------------第二组遥测02 00 00 00 00 F3 ---------------第三组遥测03 00 00 00 00 91 ----------------第四组遥测EB 90 EB 90 EB 90---------------同步字71 B3 04 01 01 35 ---------------一般遥测00 00 00 00 00 37 ---------------第一组遥测01 00 00 00 00 55 ---------------第二组遥测02 00 00 00 00 F3 ---------------第三组遥测03 00 00 00 00 91 ----------------第四组遥测EB 90 EB 90 EB 90 ----------------同步字71 85 04 01 01 C5 ---------------电能脉冲A0 00 00 00 00 0C ----------------第一路脉冲A1 00 00 00 00 6E ----------------第二路脉冲A2 00 00 00 00 C8 ----------------第三路脉冲A3 00 00 00 00 AA ----------------第四路脉冲以下为下行报文,请注意比较其与上行报文的不同之处:EB 90 EB 90 EB 90 ----------------同步字71 61 03 01 01 EF -----------------遥控选择E0 33 00 33 00 91 ----------------对0号开关进行遥控分操作,连发3遍E0 33 00 33 00 91 ----------------33表示是遥控分E0 33 00 33 00 91 ----------------00表示是0号开关EB 90 EB 90 EB 90 -----------------同步字71 B3 03 01 01 0E -----------------遥控撤消E3 55 00 55 00 9d -----------------对0号开关的遥控分操作撤消,连发3遍E3 55 00 55 00 9d -----------------55表示遥控撤消E3 55 00 55 00 9dEB 90 EB 90 EB 90 ------------------同步字71 61 03 01 01 EF ------------------遥控选择E0 CC 00 CC 00 97 -------------------对0号开关进行遥控合操作,连发3遍E0 CC 00 CC 00 97 -------------------CC表示遥控合E0 CC 00 CC 00 97EB 90 EB 90 EB 90 -------------------同步字71 F4 03 01 01 F7 -------------------遥调升选择E4 CC 00 CC 00 18 -------------------对0号设备进行遥调升操作,连发3遍E4 CC 00 CC 00 18 -------------------CC表示遥调升E4 CC 00 CC 00 18EB 90 EB 90 EB 90 -------------------同步字71 26 03 01 01 16 -------------------遥调升撤消E7 55 00 55 00 12 -------------------对0号设备的遥调升操作撤消,连发3遍E7 55 00 55 00 12 -------------------55表示遥调升E7 55 00 55 00 12EB 90 EB 90 EB 90 ------------------同步字71 7A 02 01 01 69 ------------------对时报文EE 03 00 12 22 3F -----------------34分18秒0003毫秒EF 13 19 09 06 9E -----------------2006年09月25日19时EB 90 EB 90 EB 90 ------------------同步字71 57 03 01 01 32 ------------------设置某个数值E8 C3 00 17 00 71 ------------------将0号数据设定为23,连发3遍E8 C3 00 17 00 71 ------------------00表示选择的数据,17为设定后的数值E8 C3 00 17 00 71EB 90 EB 90 EB 90 ------------------广播命令21 9E 00 01 01 79将上述报文中的同步字更换为D7 09 D7 09 D7 09,效果是一样的。