平面度误差的测量及数据处理
- 格式:doc
- 大小:226.00 KB
- 文档页数:17
![[最新]平面度的测量](https://img.taocdn.com/s1/m/1723eaf1846a561252d380eb6294dd88d0d23d4d.png)
平面度测量工作单位:广东技术师范学院机电学院机械精度检测实验室作者:刘涵章关键词:平面度平面度误差三远点法三角形准则对角线准则对角线法目录一、什么是平面度二、平面度误差值的各种评定方法三、误差值评定的步骤:四、实验教学中的实验仪器和实验步骤:五、平面度误差值的各种评定方法应用举例六、总结一、什么是平面度首先谈一谈什么是平面度,平面度就是实际平面相对理想平面的变动量。
换句话说,就是被测平面具有的宏观凹凸高度相对理想平面的偏差。
也可以说成是平整程度。
平面度公差是实际表面对平面所允许的最大变动量。
也就是用以限制实际表面加工误差所允许的变动范围。
这个变动范围可以在图样上给出。
(可以插入一个图)二、平面度误差值的各种评定方法1. 最小区域判别准则:由两个平行平面包容实际被测平面S时,S上至少有四个极点分别与这两个平行平面接触,且满足下列条件之一:(1)至少有三个高(低)极点与一个平面接触,有一个低(高)极点与另一个平面接触,并且这一个极点的投影落在上述三个极点连成的三角形内(三角形准则);(2)至少有两个高极点和两个低级点分别与这两个平行平面接触,并且高极点连线和低极点连线在空间呈交叉状态(交叉准则);这两个平行平面之间的区域即为最小区域,该区域的宽度即为符合定义的平面度误差值。
就是最高点与最低点的差值。
如下图所示:2.三远点平面法和对角线平面法:平面度误差值还可以用对角线平面法和三远点法评定。
对角线平面法是指以通过实际被测平面一条对角线(两个角点的连线)且平行另一条对角线(其余两个角点的连线)的平面作为评定基准,取各测点相对于它的偏离值中最大偏离值(正值或零)与最小偏离值(零或负值)之差作为平面误差值。
三远点平面法是指以通过被测平面上相距最远的三个点构成的平面作为评定基准,取各测点相对于它的偏离值中最大偏离值(正值或零)与最小偏离值(零或负值)之值差作为平面度误差值。
应当指出,由于从实际被测平面上选取相距最远的三个点有多种可能,因此按三远点平面法评定的平面度误差值不是唯一的,有时候差别颇大。

平面度误差测量数据处理.在大中专黉舍机械类各专业中,《交换性与测量技巧基本》是一门重要的技巧基本课,该课程内容十分丰硕,而教授教养课时相对较少,很多重点和难点内容难以作具体讲授.个中形位公役与技巧测量的内容学生懂得控制更为艰苦,在四项形位公役中,直线度与平面度误差的测量是一般机械制作行业重要的检测项目,故要肄业生重点进修和控制.直线度误差的测量相对较为简略,而平面度误差的测量及数据处理比较庞杂,且懂得艰苦.本文仅对平面度误差的测量和数据处理作较为具体的介绍,希冀初学者能尽快控制这一重点和难点内容.一.平面度误差的测量平面度误差是指被测现实概况对其幻想平面的变动量.平面度误差是将被测现实概况与幻想平面进行比较,两者之间的线值距离即为平面度误差值;或经由过程测量现实概况上若干点的相对高度差,再换算以线值暗示的平面度误差值.平面度误差测量的经常应用办法有如下几种:1.平晶干预法:用光学平晶的工作面表现幻想平面,直接以干预条纹的曲折程度肯定被测概况的平面度误差值.重要用于测量小平面,如量规的工作面和千分尺测头测量面的平面度误差.2.打表测量法:打表测量法是将被测零件和测微计放在尺度平板上,以尺度平板作为测量基准面,用测微计沿现实概况逐点或沿几条直线偏向进行测量.打表测量法按评定基准面分为三点法和对角线法:三点法是用被测现实概况上相距最远的三点所决议的幻想平面作为评定基准面,实测时先将被测现实概况上相距最远的三点调剂到与尺度平板等高;对角线法实测时先将现实概况上的四个角点按对角线调剂到两两等高.然后用测微计进行测量,测微计在全部现实概况上测得的最大变动量即为该现实概况的平面度误差.3.液平面法:液平面法是用液平面作为测量基准面,液平面由“连通罐”内的液面构成,然后用传感器进行测量.此法重要用于测量大平面的平面度误差.4.光束平面法:光束平面法是采取准值千里镜和对准靶镜进行测量,选择现实概况上相距最远的三个点形成的光束平面作为平面度误差的测量基准面.除上述办法可测量平面度误差外,还有采取平面干预仪.程度仪.自准直仪等用于测量大型平面的平面度误差.二.平面度误差的评定办法平面度误差的评定办法有:三远点法.对角线法.最小二乘法和最小区域法等四种.1.三远点法:是以经由过程现实被测概况上相距最远的三点所构成的平面作为评定基准面,以平行于此基准面,且具有最小距离的两包涵平面间的距离作为平面度误差值.2.对角线法:是以经由过程现实被测概况上的一条对角线,且平行于另一条对角线所作的评定基准面,以平行于此基准面且具有最小距离的两包涵平面间的距离作为平面度误差值.3.最小二乘法:是以现实被测概况的最小二乘平面作为评定基准面,以平行于最小二乘平面,且具有最小距离的两包涵平面间的距离作为平面度误差值.最小二乘平面是使现实被测概况上各点与该平面的距离的平方和为最小的平面.此法盘算较为庞杂,一般均需盘算机处理.4.最小区域法:是以包涵现实被测概况的最小包涵区域的宽度作为平面度误差值,是相符平面度误差界说的评定办法.三.平面度误差的数据处理由上述平面度误差的测量办法和评定办法阐述可知,测量办法和评定办法不合,数据处理的办法也不雷同.选定某一测量办法和评定办法,可能直接得到现实概况的平面度误差值,如采取打表法进行测量,再用对角线法评定其平面度误差,则可不必进行数据处理,可直接得到测量成果;采取程度仪进行测量,则不管采取何种评定办法,均需进行数据处理;而对于任何一种测量办法,假如按最小区域法来评定其平面度误差,都必须进行数据处理才干得到平面度误差值.别的,还应留意到,测量基准面和评定基准面一般是不重合的(或说不服行的).尤其是相符最小前提的评定基准面的地位是按现实概况的外形肯定的,不成能在测量之前预先肯定,如图一所示.且测量所得到的原始数据中的最大值与最小值其实不一定是现实概况上的最高点和最低点,故在数据处理之前,一般应依据所测数据对现实概况的外形特点进行大致剖析,初步断定现实概况是凸形.凹形.鞍形或其它庞杂形态,以免过多反复盘算消费时光,须要时还可画出其数据空间散布示意图,进而肯定其评定基准面.数据处理办法有:解析法.坐标变换法和投影作图法等.个中坐标变换法对数据处理带有一般性,应当闇练控制.坐标变换法是将被测现实概况上各点对测量基准面的坐标值,转换为与评定办法相对应的评定基准面的坐标值.因为评定基准面的扭转可使各测得值产生不合的变更,从而获得不合的评定成果.坐标变换法又称为扭转法,其本质是在测得数据上加上一对应的等差数列.各测点的扭转量如图二所示.当采取最小区域法评定现实概况的平面度误差时,最小区域法判别准则亦应闇练控制,才干在数据处理之前做到胸有成竹,防止过多反复盘算而少走弯路.平面度最小区域的判别准则是:由两平行平面包涵现实被测要素时,实现至少三点或四点接触,且具有下列情势之一者,即为最小区域,如图三所示.图一图二最大值与最小值可直接得到被测概况的平面度误差值为:f1= 90-(-50)=140μm.2.三远点法肯定平面度误差选择a3.b1.c 2三点构成的三角形作为评定基准面,采取旋转法将此三点扭转至等高,盘算扭转量,并将各点扭转量与原始数据各对应点相加,可得评定命据如图五所示.树立方程组:解之得:由评定命据可知,过最高点b2 =115和最低点a1=0,可作两包涵平面且平行 a 3=b1=c3=5 构成的三角形评定基准面,则被测现实概况的平面度误差值为:f 2 =115 - 0 =115μm.3.最小包涵区域法肯定平面度误差由原始数据剖析,现实概况为凸型,可实现三角形准则,今选择a1.a3.c2三点构成的三角形平面作为一个包涵平面,采取扭转法将此三点扭转至等高,盘算扭转量,并将各点扭转量与原始数据各对应点相加,可得评定命据如图六所示.树立方程组:解之得:由评定命据可知,最高点b2 =111.75,最低点a1=a3=c2 =0,其余各点的坐标值均在最高点与最低点之间,过最高点和最低点作两包涵平行平面,相符最小包涵区域的准则,故被测现实概况的平面度误差值为:f3=111.75 - 0=111.75μm..例二.用程度仪测量某现实概况的平面度误差,所测数据按测量次序累积后,各测点坐标值(单位:μm),如图七所示,试肯定其平面度误差值.解:采取程度仪测量,不成能直接得到测量成果,现采取坐标变换法进行数据处理,以实用不合评定办法获得现实概况的平面度误差值.1. 对角线法肯定平面度误差将两对角线的测得值扭转至等高,盘算扭转量,并将各点扭转量与最大值与最小值可直接得到被测概况的平面度误差值为:f1= 90-(-50)=140μm.2.三远点法肯定平面度误差选择a3.b1.c 2三点构成的三角形作为评定基准面,采取旋转法将此三点扭转至等高,盘算扭转量,并将各点扭转量与原始数据各对应点相加,可得评定命据如图五所示.树立方程组:解之得:由评定命据可知,过最高点b2 =115和最低点a1=0,可作两包涵平面且平行 a 3=b1=c3=5 构成的三角形评定基准面,则被测现实概况的平面度误差值为:f 2 =115 - 0 =115μm.3.最小包涵区域法肯定平面度误差由原始数据剖析,现实概况为凸型,可实现三角形准则,今选择a1.a3.c2三点构成的三角形平面作为一个包涵平面,采取扭转法将此三点扭转至等高,盘算扭转量,并将各点扭转量与原始数据各对应点相加,可得评定命据如图六所示.树立方程组:解之得:1.一个最高(低)点在另一包涵平面上的投影位于三个最低(高)点所形成的三角形区域内,称为三角形的准则,如图三(a).(b)所示.2.两个最高点的连线与两个最低点的连线在包涵平面上的投影订交,称为交叉准则,如图三(c)所示.3.一个最高(低)点在另一个包涵平面上的投影位于两个最低(高)点的连线上,称为直线准则.如图三(d)所示,直线准则是三角形准则和交叉准则的特别情形四.举例例一.用打表法测量某现实概况的平面度误差数据(单位μm),如图四所示,试肯定其平面度误差值.解:1.对角线法肯定平面度误差因实测数据两对角线已等高,不必再进行数据处理,依据实测数据的由评定命据可知,最高点b2 =111.75,最低点a1=a3=c2 =0,其余各点的坐标值均在最高点与最低点之间,过最高点和最低点作两包涵平行平面,相符最小包涵区域的准则,故被测现实概况的平面度误差值为:f3=111.75 - 0=111.75μm..例二.用程度仪测量某现实概况的平面度误差,所测数据按测量次序累积后,各测点坐标值(单位:μm),如图七所示,试肯定其平面度误差值.解:采取程度仪测量,不成能直接得到测量成果,现采取坐标变换法进行数据处理,以实用不合评定办法获得现实概况的平面度误差值.1. 对角线法肯定平面度误差将两对角线的测得值扭转至等高,盘算扭转量,并将各点扭转量与原始数据各对应点相加,可得评定命据如图八所示.树立方程组:解之得:依据评定命据可得被测现实概况的平面度误差值为:f 1=37-(-7.5)=44.5μm.2.三远点法肯定平面度误差选择a2.b1.c 3三点构成的三角形作为评定基准面,采取扭转法将此三点扭转至等高,盘算扭转量,并将各点扭转量与原始数据各对应点相加,可得评定命据如图九所示.树立方程组:解之得:小包涵区域准则,不在交叉线上的其余点均可落在此包涵区域内,故现实被测概况的平面度误差值为:f3=32-(-10)=42μm.例三.某被测现实概况的平面度误差数据(单位:μm),如图十一所示,数据处理采取投影作图法,试按最小包涵区域法评定其平面度误差值.解:投影作图法本质是画法几何基本理论中的投影变换法,个中有换面法和扭转法.将实测数据置于投影系统中,对选定的评定基准面变换成某投影面的垂直面,即可依据响应的评定办法肯定被测现实概况的平面度误差值.依据被测现实概况的原始数据断定为凸形概况,可实现三角形准则.画出各测点的空间散布示意图,如图十二所示.选择a 3.b1.c2三点构成一个三角形包涵平面,若过最高点 b 2作另一包涵平面,则可实现最小包涵区域准则. 今采取换面法肯定其平面度误差,将各测点向V/H投影系统中进行投影,并将a3.b1.c2 三点构成的三角形平面变换成V1/H新投影系统中的垂直面,其余测点都向V1面投影,过最高点b 2作平行线与垂直面平行,可见其余测点均在两平行线之间,如图十三所示.则被测现实概况的平面度误差为两平行线之间的坐标值:f=54μm. 若采取投影变换法中的扭转法亦可肯定其平面度误差值,在此不再赘述.。

课程设计说明书题目:平面度误差的测量及数据处理学生姓名:学院:班级:指导教师:摘要平面度误差是将被测实际表面与理想平面进行比较,两者之间的线值距离即为平面度误差值;或通过测量实际表面上若干点的相对高度差,再换算以线值表示的平面度误差值。
本文就平面度误差的数学模型与按最小二乘法建立理想平面(评定基准)的数学模型展开分析讨论;并结合案列分析,得出比较客观地评定平面度误差或者测量较大平面的平面度误差,最小二乘法是最佳方法[1]关键词:最小二乘法;平面度误差;最佳方法AbstractFlatness error is measured by actual surface with an ideal plane are compared, the line between the two values of distance, which is the flatness error values, or by measuring the actual surface on several points of relative height difference, conversion to line value representation of flatness error value .This paper studies the mathenatical model of flatness error and ideal plane made by least square method .With illust ration of practical cases, the author reaches the conclusion that least sauare method is the best one in judging and measuring larger plane’s flatness error.Keywords: Leastaquare method ; Flatness error;Best method目录第一章平面度的测量方法 (1)1.1引言 (1)1.2平面度误差的测量 (1)第二章平面度的评定 (3)2.1最小区域法 (3)2.2最小二乘法测量平面度误差的原理 (4)2.2.1建立被测实际表面的数学模型 (4)第三章用MATLA实现的过程 (6)3.1软件编程 (6)3.2平面度误差的最小二乘法评定及其评定结果的不确定度 (10)3.3小结 (13)第一章平面度的测量方法1.1 引言平面度误差是指被测实际表面对其理想平面的变动量。

几种评定平面度误差的计算方法
平面度误差是指工件表面与一个参考平面之间的最大高度差,它是衡量工件表面平整程度的重要指标之一、在实际生产中,可以采用以下几种方法来评定平面度误差:
1.平板法:这是最常用的一种方法。
平板法是通过先选取一块平整度较高的平板,将待测工件与平板接触,观察其接触面与平板间的间隙情况来评定平面度。
一般情况下,采用滑动块、千分尺等仪器来测量间隙,进而计算平面度误差。
2.运动测量法:该方法利用光、电等传感器对工件表面进行扫描,实时测量得到工件各点的高度,从而分析工件表面的平整程度。
这种方法能够实现对整个工件表面的测量,但需要专用的测量设备和数据分析软件。
3.几何测量法:该方法通过利用激光干涉仪、投影仪等设备,将工件表面的几何形状投影到幕布或传感器上,再通过图像处理和数据分析来评定工件的平面度。
这种方法操作简单、实时性好,适用于工件边缘和曲面的平面度测量。
4.反射测量法:该方法利用反射光的原理,通过测量光线发生反射后的角度变化来评定工件表面的平面度。
通常通过使用光幕、棱镜等设备来测量反射光线,然后通过计算反射光线的角度变化来推算出平面度误差。
5.数字化测量法:近年来,随着计算机技术的快速发展,数字化测量方法得到了广泛应用。
该方法使用数字化测量设备,如三坐标测量机、光学扫描仪等,可以将工件表面的拓扑信息转化为数字化数据,通过数据分析和处理来评定工件的平面度误差。
数字化测量法具有高精度、高效率的特点,尤其适用于复杂形状的工件。
综上所述,以上是几种常见的评定平面度误差的计算方法。
不同的方法适用于不同的测量对象和实际生产环境,在具体应用中需要根据需要选择合适的方法来进行测量和评定。

圆度、直线度、平面度误差测量及数据处理1 圆度误差测量及数据处理 (1)1.1 圆度误差概述 (1)1.2 平面圆公差带和圆度误差的定义 (1)1.3 圆度误差的评定方法 (2)1.4 最小二乘法评定圆度误差 (4)①基本原理 (4)②数学模型 (4)③算法设计 (5)2 直线度误差测量及数据处理 (6)2.1 直线度误差概述 (6)2.2 给定平面直线度 (7)2.3 最小二乘法评定给定平面的直线度误差 (9)2.4 最小包容区域法评定给定平面的直线度误差 (11)2.5 任意方向的直线度 (13)2.6 最小二乘法评定的任意方向的直线度误差 (14)3 平面度误差测量及数据处理 (18)3.1 平面度误差概述 (18)3.2 平面度公差带和平面度误差的定义 (18)3.2 平面度误差的评定方法 (19)3.3 最小二乘法评定平面度误差 (20)1 圆度误差测量及数据处理1.1 圆度误差概述机械零件回转表面正截面轮廓的圆度误差对机器和仪器的功能有直接的影响,因此在设计机器和仪器时根据零件的功能要求须给定适宜的公差。
而完工零件的圆度误差是否在控制的公差之内,则要通过测量加以判定。
对回转体零件的典型截面进行圆度误差测量是检验该类零件加工质量的重要指标之一。
1.2 平面圆公差带和圆度误差的定义根据相关标准,圆的公差带是在同一正截面上,半径为公差值t的两同心圆之间的区域。
被测柱面、锥面、环面等回转体任一正截面圆周必须位于半径差为公差值t的两同心圆之间[2]。
如图1所示。
圆度误差是指回转体在同一正截面上实际被测轮廓相对其理想圆的变动量。
误差值等于包容所有被测点的两同心圆半径之差,差值应符合最小条件。
图1圆的公差带1.3 圆度误差的评定方法在GB7234—87《圆度测量术语、定义及参数》中,圆度误差的评定方法有:最小外接圆法(RGC)、最大内切圆法(PGC)、最小二乘圆法(LSC)和最小区域圆法(MZC)。
实验7:合像水平仪测量平板平面度一 实验目的1.掌握用合像水平仪测量平面度误差的基本原理和方法。
2.使用两种不同的测量方法测量并计算平面度误差。
二 测量仪器说明1.仪器说明:合像水平仪广泛的应用于测量平面和圆柱面对倾斜方向的倾斜度,以及机床与光学机械仪器的导轨或机座等的平面度、直线度和设备安装位置的正确度。
2.实验原理:合像水平仪是利用棱镜将水准器中的气泡像符合放大,来提高读数的精确度,利用杠杆、微动螺杆这一套传动机构来提高读书的灵敏度。
所以被测量件倾斜m mm /1.0时,就可以精确的在合像仪中读出。
3.仪器规格:刻度分划值0.01m mm /;最大测量范围0~10m mm /,示值误差m mm /1±范围内m mm /01.0±,全部测量范围内m mm /02.0±。
工作面片面性偏差0.003mm 。
水准器格值m mm /1.0。
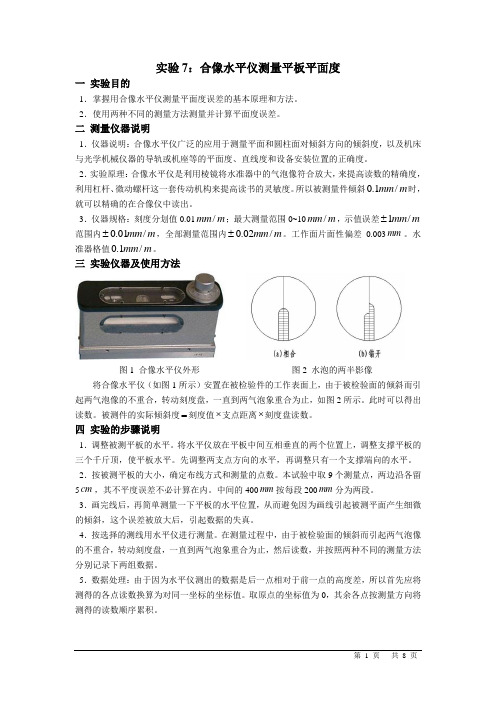
三 实验仪器及使用方法图1 合像水平仪外形 图2 水泡的两半影像 将合像水平仪(如图1所示)安置在被检验件的工作表面上,由于被检验面的倾斜而引起两气泡像的不重合,转动刻度盘,一直到两气泡象重合为止,如图2所示。
此时可以得出读数。
被测件的实际倾斜度=刻度值⨯支点距离⨯刻度盘读数。
四 实验的步骤说明1.调整被测平板的水平。
将水平仪放在平板中间互相垂直的两个位置上,调整支撑平板的三个千斤顶,使平板水平。
先调整两支点方向的水平,再调整只有一个支撑端向的水平。
2.按被测平板的大小,确定布线方式和测量的点数。
本试验中取9个测量点,两边沿各留5cm ,其不平度误差不必计算在内。
中间的400mm 按每段200mm 分为两段。
3.画完线后,再简单测量一下平板的水平位置,从而避免因为画线引起被测平面产生细微的倾斜,这个误差被放大后,引起数据的失真。
4.按选择的测线用水平仪进行测量。
在测量过程中,由于被检验面的倾斜而引起两气泡像的不重合,转动刻度盘,一直到两气泡象重合为止,然后读数,并按照两种不同的测量方法分别记录下两组数据。
平面度误差测量数据处理。
在大中专学校机械类各专业中,《互换性与测量技术基础》是一门重要的技术基础课,该课程内容十分丰富,而教学课时相对较少,许多重点和难点内容难以作详细讲解。
其中形位公差与技术测量的内容学生理解掌握更为困难,在四项形位公差中,直线度与平面度误差的测量是一般机械制造行业主要的检测项目,故要求学生重点学习和掌握。
直线度误差的测量相对较为简单,而平面度误差的测量及数据处理比较复杂,且理解困难。
本文仅对平面度误差的测量和数据处理作较为详细的介绍,希冀初学者能尽快掌握这一重点和难点内容。
一、平面度误差的测量平面度误差是指被测实际表面对其理想平面的变动量。
平面度误差是将被测实际表面与理想平面进行比较,两者之间的线值距离即为平面度误差值;或通过测量实际表面上若干点的相对高度差,再换算以线值表示的平面度误差值。
平面度误差测量的常用方法有如下几种:1、平晶干涉法:用光学平晶的工作面体现理想平面,直接以干涉条纹的弯曲程度确定被测表面的平面度误差值。
主要用于测量小平面,如量规的工作面和千分尺测头测量面的平面度误差。
2、打表测量法:打表测量法是将被测零件和测微计放在标准平板上,以标准平板作为测量基准面,用测微计沿实际表面逐点或沿几条直线方向进行测量。
打表测量法按评定基准面分为三点法和对角线法:三点法是用被测实际表面上相距最远的三点所决定的理想平面作为评定基准面,实测时先将被测实际表面上相距最远的三点调整到与标准平板等高;对角线法实测时先将实际表面上的四个角点按对角线调整到两两等高。
然后用测微计进行测量,测微计在整个实际表面上测得的最大变动量即为该实际表面的平面度误差。
3、液平面法:液平面法是用液平面作为测量基准面,液平面由“连通罐”内的液面构成,然后用传感器进行测量。
此法主要用于测量大平面的平面度误差。
4、光束平面法:光束平面法是采用准值望远镜和瞄准靶镜进行测量,选择实际表面上相距最远的三个点形成的光束平面作为平面度误差的测量基准面。
课程设计说明书题目:平面度误差的测量及数据处理学生:学院:班级:指导教师:摘要平面度误差是将被测实际表面与理想平面进行比较,两者之间的线值距离即为平面度误差值;或通过测量实际表面上若干点的相对高度差,再换算以线值表示的平面度误差值。
本文就平面度误差的数学模型与按最小二乘法建立理想平面(评定基准)的数学模型展开分析讨论;并结合案列分析,得出比较客观地评定平面度误差或者测量较大平面的平面度误差,最小二乘法是最佳方法[1]关键词:最小二乘法;平面度误差;最佳方法AbstractFlatness error is measured by actual surface with an ideal plane are compared, the line between the two values of distance, which is the flatness error values, or by measuring the actual surface on several points of relative height difference, conversion to line value representation of flatness error value .This paper studies the mathenatical model of flatness error and ideal plane made by least square method .With illust ration of practical cases, the author reaches the conclusion that least sauare method is the best one in judging and measuring larger plane’s flatness error.Keywords: Leastaquare method ; Flatness error;Best method目录第一章平面度的测量方法 (1)1.1引言 (1)1.2平面度误差的测量 (1)第二章平面度的评定 (3)2.1最小区域法 (3)2.2最小二乘法测量平面度误差的原理 (3)2.2.1建立被测实际表面的数学模型 (4)第三章用MATLA实现的过程 (6)3.1软件编程 (6)3.2平面度误差的最小二乘法评定及其评定结果的不确定度 (9)3.3小结 (12)第一章平面度的测量方法1.1 引言平面度误差是指被测实际表面对其理想平面的变动量。
理想平面是评定平面度误差的评定基准,而评定基准的方位不同求得的平面度误差值也不同。
若用水平仪、自准直仪按节距法测量实际表面上各点相对于测量基准的平面度误差时,确定评定基准的方法可用:简便法、最小二乘法、和最小包容区域法[2]。
本文着重分析介绍最小二乘法来确定评定基准,从而求得平面度误差值。
最小二乘法能准确而充分地利用全部的原始观测数据提供的信息,比较客观地评定出不需要经过多次试算的平面度误差,而且可直接运用于电子计算机运算,列入MATLAB软件,是的平面度误差的计算达到迅速、准确、可靠[7]。
1.2 平面度误差的测量平面度误差的测量方法很多,常用的有如下所列的方法:①光隙法:将被测直线和测量基线间形成的光隙,与标准光隙比较,测量不同方向的若干个截面上的直线度误差,取其中最大值,作为平面度误差近似值的方法。
该方法适用于磨削或研磨加工的小平面的平面度误差测量。
②指示器法:将被测零件支撑在平板上,平板工作面为测量基准,按一定的方式布点,如图3所示,用指示器对被测面上各点进行测量并记录所测数据,然后,按一定的方法评定其误差值。
该方法适用于中、小平面的平面度误差测量。
③光轴法:以几何光轴建立测量基面,测出被测面相对测量基面的偏离量,进而评定平面度误差值的方法,该方法适用于一般精度大平面的平面度误差测量。
④干涉法:利用光波干涉原理,根据干涉条纹形状、条数,来确定平面度误差值的方法,该方法适用于精研表面的平面度误差测量。
⑤三坐标测量机:三坐标测量机是综合利用精密机械、微电子、光栅和激光干涉仪等先进技术的测量仪器,其原理是在三个相互垂直的方向上,有导向机构、测长元件、数显装置,有一个能够放置工件的工作台,测头可以以手动或机动方式,轻快地移动到被测点上,由读数设备和数显装置,把被测点的坐标值显示出来的一种测量设备[4]。
除上面介绍的几种方法外,还有液面法、自准直仪法等,工贸职业中专学校实验室在教学中,常采用光学合像水平仪测定平板的平面度误差。
第二章平面度的评定平面度误差是被测实际表面相对理想平面的变动量。
根据GB/T1 1337-2004{平面度误差检测》对形状误差的定义,理想平面的位置应符合最小条件,平面度误差大小,等于包容实际表面且距离为两平行平面之间的宽度。
平面度误差的评定方法有:最小包容区域法,对角线法,三远点法和最小二乘法[5]。
2.1 最小区域法它是两平行包容平面与实际被测要素的接触状态符合平面度误差判别法中某一准则时,此时两平行平面之问的距离,为平面度误差。
用最小条件评定平面度误差有3种判断准则:三角形准则,交叉准则,直线准则。
平面度误差的最小区域判别方法是:由两个平行平面包容被测实际表面时,至少有3点或4点相接触,接触点的高低分布,有下列3种形式之一者,即符合最小区域。
①三角形准则:如果被测实际表面上有3个最高(低)点及一个最低(高)点分别与两个包容平面相接触,并且最高(低)点能投影到3个最低(高)点之间,形成最小包容,称为三角形准则。
②交叉准则:两个高点与两个低点某些实际表面具有鞍形的形状特征,其与上下包容面各有两个接触点,若两高点的投影位于两低点连线之两侧,形成最小包容,称为交叉准则。
③直线准则:如果被测表面上的同一截面有两个最高(低)点与一个低(高)点分别和两个平行的包容面相接触,并且有一个最低(高)点的投影要落在两高(或两低)点连线之上,此时也形成最小包容,称为直线准则。
④对角线法:评定基准平面是通过实际平面的一条对角线和平行于另一条对角线的平面,各测点对此平面的偏差中最大正值与最大负值的绝对值之和为被测实际平面的平面度误差值。
⑤三点法:评定基准平面是通过被测实际平面上相距较远且不在一条直线上的三点建立的平面。
偏离此平面的最大值和最小值的绝对值之和为平面度误差这三种方法虽然都是针对同一被测平面,但由于评定基准平面选取不同,得到的误差值也不同[6]。
2.2 最小二乘法测量平面度误差的原理最小二乘平面是个理想的平面,它使从实际被测轮廓上各点到该平面的距离的平方和为最小。
因此,最小二乘法的目标函数,即各测点到最小二乘基准平面的距离的平方和F (A,B,C )=∑=ni ijd12 (2-1)其满足最小化时,F (A,B,C )的(A,B,C )即最小二乘基准平面的法向量,=f minmaxijijd d - (2-2)即为最小二乘法平面度误差值[3]。
2.2.1 建立被测实际表面的数学模型平面度误差是指被测实际表面不平的程度,而平面在空间直角坐标系中,它的一般方程为;AX+BY+CZ+D=0; 假设测得的点的坐标是(i i i z y x ,,)(i =1,2,…,n ),其中A,B,C 为待定参数。
根据最小二乘法原理得到最小二乘平面的待定系数A,B,C 为A=222/∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑iii ii i iiii iii ii i i i iiiyy x y y x x x yx n y z y yy x z x x y z n(2-3)B=222/∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑iii ii iiiii ii ii iii iiii i yy x y yx x x yx n z y y x y z x x x y x z (2-4)C=2222/∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑∑iii ii i iiii iii ii i i iii ii iyy x y yx x x y x n y y x z y y x x z x y x z (2-5)由于现在知道A,B,C 的系数,即确定了最小二乘平面。
接下来就是就能知道改平面的上方的点和下方的点到该平面的距离,由于在该平面上下方都有点,所以点的本身就带有矢量性。
点到平面的距离公式为)1(y 22B AC B Ax z d i i i i ++---=(2-6)根据最小二乘法的原理有:min 2=∑niid(2-7)由于观测到的数据位于最小二乘平面(基准平面)的上下两侧,所以有点到平面的距离有最大值和最小值的两个点!即平面度为=f minmaxijijd d - (2-8)第三章用MATLA实现的过程3.1 软件编程本文是通过MATLAB软件求得最小二乘平面(基准平面)的系数A,B,C,将最小二乘平面(基准平面)拟合在三维坐标中和求出基准平面的平面度误差。
根据观测到的数据如下:x(mm) y(mm) z(mm)1 10.132 43.982 -0.0032 19.641 44.092 -0.0013 30.444 44.217 -0.0024 30.618 29.359 -0.0025 17.741 29.210 -0.0016 5.450 29.068 -0.0077 4.912 46.453 -0.0128 15.887 46.580 -0.0049 29.745 46.740 -0.00210 30.104 15.746 0.00311 18.721 15.614 -0.00412 5.738 15.464 -0.01013 17.630 47.032 -0.01014 29.966 47.174 -0.00715 5.989 44.945 -0.01116 16.808 45.071 -0.00517 28.761 45.209 -0.00218 28.901 33.125 0.00019 17.108 32.988 -0.00720 3.975 32.836 -0.00821 4.188 14.508 -0.008现在将MATLAB 代码输入软件中:function testlsqnonlin111 clc; clear all; close all; % 读入数据data = xlsread('数据.xls'); % 3列对应x,y ,z xdata = data(:,2); ydata = data(:,3); zdata = data(:,4); % 画出原始数据点,红色 figure;plot3(xdata,ydata,zdata,'r*');hold on; % 初始值 a b c 都为0 x0 = [0 0 0]';% 调用最小二乘法非线性拟合函数x =lsqnonlin((x) myfun(x,xdata,ydata,zdata),x0) % 求平面度误差 % 平面方程的系数 a = x(1); b = x(2);22 17.690 14.664 0.003 23 30.909 14.8170.00424 30.140 32.118 -0.003 25 18.378 31.981 -0.007 26 4.371 31.820 -0.004 27 18.421 31.982 -0.008 28 30.889 32.127 -0.004 29 31.111 13.1760.0013017.422 13.018 -0.005注解:将数据放入到excel 表格中如下图所示注解:将保存好的数据文件与MATLAB 的代码文件放到同一个文件夹下。