最小二乘法算法程序
- 格式:docx
- 大小:12.87 KB
- 文档页数:1
最小二乘法计算方法最小二乘法(Least Squares Method)是一种用于拟合数据和求解最优参数的数学方法。
它被广泛应用于各个领域,如物理学、工程学、经济学等。
本文将介绍最小二乘法的基本原理、应用领域以及计算步骤。
最小二乘法的基本原理是通过最小化数据与拟合函数之间的误差平方和来确定最优参数。
对于一个给定的数据集,我们希望找到一个函数,使得该函数与数据之间的误差最小。
最小二乘法的核心思想是,通过调整函数的参数,使得误差平方和达到最小值。
最小二乘法可以应用于各种函数形式的拟合,包括线性函数、多项式函数、指数函数等。
在实际应用中,我们常常使用线性函数进行拟合,因为线性函数的计算较为简单,且可以用来拟合各种数据。
最小二乘法的应用领域非常广泛。
在物理学中,最小二乘法可以用来拟合实验数据,从而获得物理模型的参数。
在工程学中,最小二乘法可以用来优化控制系统的参数,提高系统的性能。
在经济学中,最小二乘法可以用来分析经济数据,预测经济趋势。
下面我们将介绍最小二乘法的计算步骤。
首先,我们需要确定拟合函数的形式。
对于线性函数拟合,拟合函数的形式可以表示为:y = a + bx,其中a和b是待确定的参数。
然后,我们需要收集实验数据,并将数据表示为坐标系中的点。
接下来,我们需要计算每个数据点到拟合函数的垂直距离,并将这些距离的平方求和,得到误差平方和。
最后,我们使用数学方法(如求导)来确定误差平方和的最小值,并得到最优参数a和b。
最小二乘法的计算步骤可以总结为以下几步:1. 确定拟合函数的形式;2. 收集实验数据,并将数据表示为坐标系中的点;3. 计算每个数据点到拟合函数的垂直距离,并求和得到误差平方和;4. 使用数学方法求解误差平方和的最小值,并得到最优参数。
需要注意的是,最小二乘法并不一定能得到唯一的最优解。
在实际应用中,我们需要综合考虑其他因素,如数据的可靠性、拟合函数的合理性等。
最小二乘法作为一种常用的数据拟合和参数求解方法,具有广泛的应用前景。
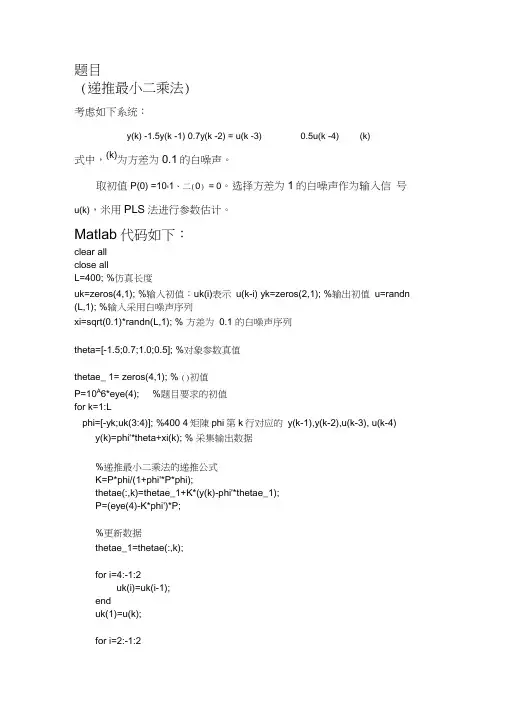
题目(递推最小二乘法)考虑如下系统:y(k) -1.5y(k -1) 0.7y(k -2) = u(k -3) 0.5u(k -4) (k)式中,(k)为方差为0.1的白噪声。
取初值P(0) =1061、二(0) = 0。
选择方差为1的白噪声作为输入信号u(k),米用PLS法进行参数估计。
Matlab代码如下:clear allclose allL=400; %仿真长度uk=zeros(4,1); %输入初值:uk(i)表示u(k-i) yk=zeros(2,1); %输出初值u=randn (L,1); %输入采用白噪声序列xi=sqrt(0.1)*randn(L,1); % 方差为0.1 的白噪声序列theta=[-1.5;0.7;1.0;0.5]; %对象参数真值thetae_ 1= zeros(4,1); % ()初值P=10A6*eye(4); %题目要求的初值for k=1:Lphi=[-yk;uk(3:4)]; %400 4矩陳phi第k行对应的y(k-1),y(k-2),u(k-3), u(k-4) y(k)=phi'*theta+xi(k); % 采集输出数据%递推最小二乘法的递推公式K=P*phi/(1+phi'*P*phi);thetae(:,k)=thetae_1+K*(y(k)-phi'*thetae_1);P=(eye(4)-K*phi')*P;%更新数据thetae_1=thetae(:,k);for i=4:-1:2uk(i)=uk(i-1);enduk(1)=u(k);for i=2:-1:2火i)=yk(i-1);end yk(1)=y(k);endplot([1:L],thetae); %line([1,L],[theta,theta]); xlabel('k'); ylabel('参数估计a、b'); lege nd('a_1','a_2','b_0','b_1');%axis([0 L -2 2]);结果分析如下系统方程为y(k) -1.5y(k -1) 0.7y(k -2) = u(k -3) 0.5u(k -4) (k)由CAR模型:y(k) =1.5y(k _1) _0.7y(k _2) u(k _3) 0.5u(k _4) (k)可以得到:-1-1 -2A(z ) =1 1.5z -0.7zB(z 斗)=z,(1 0.5z4)我们可以知道纯迟延为3T,na=2,nb=1,d=3,phi(k,:)=[-yk;uk(3:4)]'; 400 4矩阵phi第k行对应的y(k-1),y(k-2),u(k-3), u(k-4)y(k)=phi*theta+xi(k);输出等于矩阵phi与真值矩阵相乘加上白噪声。
最小二乘法分类最小二乘法(Least Squares Method)是一种常用的参数估计方法,用于寻找一个函数模型的最佳拟合参数,使得模型的预测值与观测值的残差平方和最小化。
这种方法最早由高斯提出,并被广泛应用于统计学和计算机科学等领域。
本文将介绍最小二乘法的基本原理、应用场景以及相关的算法和评估指标。
一、基本原理:最小二乘法用于求解形如y = f(x;θ) 的函数模型的参数θ,其中y是观测值,x是自变量,f是函数模型。
最小二乘法的目标是找到最佳的参数θ,使得模型的预测值与实际观测值之间的残差平方和最小化。
具体步骤如下:1. 定义函数模型:根据具体问题,选择适当的函数模型,如线性模型、多项式模型、指数模型等。
2. 表达目标函数:根据函数模型和参数θ,将目标函数表达为关于θ的函数形式。
3. 定义损失函数:通常采用残差的平方和作为损失函数,即Loss = Σ(y_i - f(x_i;θ))^2 。
4. 求解参数θ:通过最小化损失函数,即求解使得∂Loss/∂θ = 0 的参数θ。
5. 参数估计:根据求解得到的参数θ,即可获得最佳的函数模型。
二、应用场景:最小二乘法在各个领域都有广泛的应用,以下是一些常见的应用场景:1. 线性回归:最小二乘法用于拟合线性回归模型,求解自变量与因变量之间的关系。
2. 特征选择:最小二乘法可用于特征选择,筛选对目标变量影响最大的特征。
3. 数据压缩:通过最小二乘法可以估计出一个低维子空间,将高维数据进行压缩。
4. 图像处理:最小二乘法可用于图像去噪、图像恢复等问题,如使用低秩矩阵模型对图像进行恢复。
5. 信号处理:最小二乘法可用于信号滤波、信号恢复等问题,如基于 DCT 的音频和图像压缩。
三、算法与评估指标:1. 最小二乘法的数值解:在实际应用中,最小二乘法的数值解可以通过各种数值优化算法来求解,包括梯度下降法、牛顿法、共轭梯度法等。
2. 算法评估指标:常用的评估指标包括残差平方和(Residual Sum of Squares, RSS)、均方误差(Mean Square Error, MSE)以及决定系数(Coefficient of Determination, R^2)等。
递推最小二乘法的一般步骤:1. 根据输入输出序列列出最小二乘法估计的观测矩阵ϕ:] )(u ... )1( )( ... )1([)(T b q n k k u n k y k y k ------=ϕ没有给出输出序列的还要先算出输出序列。
本例中, 2)]-u(k 1),-u(k 2),-1),-y(k -[-y(k )(T =k ϕ。
2. 给辨识参数θ和协方差阵P 赋初值。
一般取0θ=0或者极小的数,取σσ,20I P =特别大,本例中取σ=100。
3. 按照下式计算增益矩阵G :)()1()(1)()1()(k k P k k k P k G T ϕϕϕ-+-= 4. 按照下式计算要辨识的参数θ:)]1(ˆ)()()[()1(ˆ)(ˆ--+-=k k k y k G k k T θϕθθ5. 按照下式计算新的协方差阵P :)1()()()1()(---=k P k k G k P k P T ϕ6. 计算辨识参数的相对变化量,看是否满足停机准则。
如满足,则不再递推;如不满足,则从第三步开始进行下一次地推,直至满足要求为止。
停机准则:εϑϑϑ<--)(ˆ)1(ˆ)(ˆmax k k k i i i i 本例中由于递推次数只有三十次,故不需要停机准则。
7. 分离参数:将a 1….a na b 1….b nb 从辨识参数θ中分离出来。
8. 画出被辨识参数θ的各次递推估计值图形。
为了说明噪声对递推最小二乘法结果的影响,程序5-7-2在计算模拟观测值时不加噪声, 辨识结果为a1 =1.6417,a2 = 0.7148,b1 = 0.3900,b2 =0.3499,与真实值a1 =1.642, a2 = 0.715, b1 = 0.3900,b2 =0.35相差无几。
程序5-7-2-1在计算模拟观测值时加入了均值为0,方差为0.1的白噪声序列,由于噪声的影响,此时的结果为变值,但变化范围较小,现任取一组结果作为辨识结果。

三、最小二乘法之多项式拟合算法和源程序:f unction p=naf it(x,y,m)A=zeros(m+1,m+1);f or i=0:mf or j=0:mA(i+1,j+1)=sum(x.^(i+j));endb(i+1)=sum(x.^i.*y);enda=A\b';p=f liplr(a');四、实验用例:假定某天的气温变化记录如下表,试用最小二乘法找出这一天的气温变化规律.t/h 0 1 2 3 4 5 6 7 8 9 10 11 1215 14 14 14 14 15 16 18 20 22 23 25 28T/ Ct/h 13 14 15 16 17 18 19 20 21 22 23 2431 32 31 29 27 25 24 22 20 18 17 16T/ C考虑下列类型函数,计算误差平方和,并作图比较结果:(1)二次函数;(2)三次函数;(3)四次函数;(4)函数.五、实验结果:输入:x=0:24;y=[15 14 14 14 14 15 16 18 20 22 23 25 28 31 32 31 29 27 25 24 22 20 18 17 16];结果:(1):p=naf it(x,y,2)p =-0.09362.59438.4157xi=0:0.1:24;y i=polyv al(p,xi);subplot(2,2,1);plot(x,y,'o',xi,y i,'k');title('polyfit');(2):p=naf it(x,y,3)p =-0.00800.1931-0.102213.2513y i=polyv al(p,xi);subplot(2,2,2);plot(x,y,'o',xi,y i,'k');title('poly interp');(3):p=naf it(x,y,4)p =0.0009-0.05210.8658-3.525716.6041 y i=polyv al(p,xi);subplot(2,2,3);plot(x,y,'o',xi,y i,'k');title('linear');(4):p=naf it(x,log(y),2)p =-0.00450.12532.3866y i=exp(polyv al(p,xi));subplot(2,2,4); plot(x,y,'o',xi,y i,'k');title('linear');title('spline');计算误差平方和:(1):p=naf it(x,y,2)p =-0.09362.59438.4157y1=polyv al(p,x);e1=sum((y-y1).^2)e1=241.2443(2):p=naf it(x,y,3)p =-0.00800.1931-0.102213.2513y2=polyv al(p,x);e2=sum((y-y1).^2)e2 =241.2443(3):p=naf it(x,y,4)p =0.0009-0.05210.8658-3.525716.6041 y3=polyv al(p,x);e3=sum((y-y3).^2)e3=36.2837(4):p=naf it(x,log(y),2)p =-0.00450.12532.3866y1=exp(polyval(p,x));e4=sum((y-y1).^2)e4=178.6060。
%基本ESPRIT算法,第二种方法最小二乘法clear all;close all;clc;c=3*10^8;f=3*10^9;%% 求得信号的波长lamda=c/f;%%阵元的间距d=lamda/2;%% (n-1)为子阵列的个数即阵元数n=10;%% 信号的数目signal_number=3;%% 三个信号的角度值thita1=-25;thita2=30;thita3=65;%% 三个信号的中心频率f1=40;f2=20;f3=70;%% 在时域来说,是快拍数(一段时间内对阵列数据采样的个数);在频域来说,是DFT的时间子段的个数。
snapshot=1:2000;%% S是信号空间,有三个信号组成S1=2.72*exp(j*2*pi*f1*snapshot/length(snapshot));S2=4.48*exp(j*2*pi*f2*snapshot/length(snapshot));S3=7.37*exp(j*2*pi*f3*snapshot/length(snapshot));S=[S1;S2;S3];%% 子阵1A1=exp(-j*2*pi*d*[0:n-1]*sin(thita1*pi/180)/lamda).';A2=exp(-j*2*pi*d*[0:n-1]*sin(thita2*pi/180)/lamda).';A3=exp(-j*2*pi*d*[0:n-1]*sin(thita3*pi/180)/lamda).';A=[A1,A2,A3];%% 噪声假设为高斯白噪声,均值为零的N= wgn(10,2000,3);%% 求信噪比的S1,S2,S3信噪比依次是10 20 30s_power1=10*log(2.72^2/2);s_power2=10*log(4.48^2/2);s_power3=10*log(7.37^2/2);snr1=s_power1-3;snr2=s_power2-3;snr3=s_power3-3;%% 整个阵列接收到的数据0-n-1为阵列1;1-n为阵列2的X=A*S+N;%% 协方差矩阵Rxx=X*X'/length(snapshot);%% 对整个数据的协方差矩阵进行特征分解,从而得到特征值向量D和特征向量V[V,D]=eig(Rxx);%[Y,I]=sort(diag(D));Us=V(:,n-signal_number+1:n);%% 两个方阵张成的两个子空间U1=Us(1:n-1,:);U2=Us(2:n,:);%% 利用最小二乘法求得旋转不变关系矩阵,然后进行特征分解[p,q]=eig(inv(U1'*U1)*U1'*U2); %张贤达《矩阵分析与应用》第528页%% 利用上面求得的矩阵来获得角度for i=1:signal_number;alpha(i)=real(asin(-j*(log(q(i,i)))*lamda/(-2*pi*d))*180/pi);end;%% 作图stem(alpha,ones(1,signal_number),'r--');grid;axis([-90 90 0 2]);text(alpha(1)-4,1.1,num2str(alpha(1)));text(alpha(1)-15,1.4,'信号1,信噪比为10'); text(alpha(2)-4,1.1,num2str(alpha(2)));text(alpha(2)-15,1.4,'信号2,信噪比为20'); text(alpha(3)-4,1.1,num2str(alpha(3)));text(alpha(3)-15,1.4,'信号3,信噪比为30'); ylabel('DOA估计的角度值');xlabel('角度');title('ESPRIT算法DOA估计');。
eigen 最小二乘法滤波解释说明1. 引言1.1 概述在数据处理和信号处理领域,我们经常需要对数据进行优化和滤波处理以提高数据的质量和可靠性。
其中,eigen最小二乘法是一种常用的数据优化方法之一,而滤波则是一种常用的数据处理技术。
本文将重点介绍eigen最小二乘法和滤波的原理、方法及其在实际中的应用。
1.2 文章结构本文主要分为五个部分进行阐述。
首先进入引言部分,概述本文涉及到的主要内容,并且给出文章结构。
接下来会详细介绍eigen算法的原理、特点以及使用示例;然后解释最小二乘法的原理介绍、求解方法以及实际应用场景;之后会对滤波方法进行概述,包括常见滤波器的介绍和滤波器性能评估指标;最后通过对eigen算法、最小二乘法和滤波方法进行总结与说明,讨论它们之间的关系、作用,并给出具体应用实例分析。
最后我们对未来发展进行了展望。
1.3 目的本文旨在全面掌握eigen最小二乘法和滤波方法相关的理论知识,并深入了解它们在实际应用中的作用和效果。
通过文章内容的阐述,读者能够理解eigen 最小二乘法的原理、特点和使用方法;掌握最小二乘法的基本原理、求解方法以及实际应用场景;了解滤波方法的概念、常见滤波器和性能评估指标。
同时,通过具体的应用实例分析,读者能够将所学知识运用到实际工程中,并对未来发展趋势有所预见。
2. eigen算法2.1 算法原理eigen算法是一种用于解决特征值和特征向量的数值计算方法。
它使用了矩阵的特殊性质,如对称性和正交性来加快计算速度并减少计算误差。
该算法通过迭代过程不断逼近最终结果,在每一次迭代中,利用特征向量的线性组合和特征值的更新来逼近原始矩阵。
这样,通过多次迭代,可以得到准确的特征值和对应的特征向量。
2.2 特点与优势eigen算法具有以下几个特点与优势:- 高效:由于采用了迭代方法,可以有效地加快计算速度并节省计算资源。
- 精确:eigen算法能够在较短时间内给出准确的特征值和特征向量的估计结果。
最小二乘法求解参数
最小二乘法求解参数是数学分析中使用最广泛的一种方法,它可以将某种未知参数变量和它们之间的数据进行关联。
本文将介绍最小二乘法的原理、算法实现方法以及其优点等内容。
一、最小二乘法原理
最小二乘法是一种通过求解最小二乘函数来求解参数的方法。
最小二乘函数定义为:
y = f(x, b)
其中,y 为拟合函数,f 为未知的参数的函数,x 为自变量,b 为参数变量。
因此,最小二乘法的目标就是最小化 y 与 f(x,b)之间的误差,以求得准确的参数变量 b。
求解的过程中,要求解的函数f(x,b)必须可导,以便求解极值问题。
二、最小二乘法算法实现
最小二乘法的算法实现主要包括四步:
(1)将原始数据进行处理,提取出可用的参数变量和自变量;
(2)确定迭代函数,将输入数据与特定的函数f(x,b)定义关系;
(3)利用最小二乘法求解出函数f(x,b)的参数变量b;
(4)对拟合曲线进行验证,确定最小二乘法求解的参数变量b 的准确性。
三、最小二乘法的优点
最小二乘法求解参数的优点如下:
(1)能够实现复杂的参数变量拟合,可以有效的拟合散乱点;
(2)可以将多个未知参数变量放入拟合曲线中,可以较好的拟合多元数据;
(3)不会受到采样点分布的影响,可以较为准确的拟合数据;
(4)能够求出拟合曲线的最小值,使得容差最小。
四、结论
最小二乘法是一种比较简单有效的求解参数的方法,它可以提供一种准确的拟合散乱点的方法,可以有效的解决参数估计问题。
不仅可以拟合多元函数,同时还可以很好的拟合非线性数据。
最小二乘法能够求出最小值,使得容差最小,因此应用十分广泛。
常用算法分析——最小二乘法目录1.引言2.普通最小二乘法(OLS)3.OLS实现4.广义最小二乘法(GLS)简介1、引言最小二乘法应该是我们最早接触的一种数值估计算法。
它的特殊形式,一元线性回归,被广泛地应用于多种数值统计分析场合。
例如,在验证欧姆定律(U = IR)时,通常的实验方法是分别测量出多个不同电压Ui下,通过电阻的电流值Ii,然后将这些(Ui, Ii)观测点,代入到一元最小二乘公式(1-1)中,便可计算出\hat{R}。
\begin{cases}a&=&\frac{\sum{xy}-\frac{1}{N}\sum{x}\sum{y}}{\sum{x^2}-\frac{1}{N}(\sum{x})^2}\\b&=&\frac{1}{N}\sum{y}-\frac{a}{N}\sum{x}\end{cases} (1-1)由此可得出线性拟合式(1-2)\hat{y}=a\hat{x}+b (1-2)其中,\hat{y}=\hat{U},\ \hat{x}=\hat{I},\ a=\hat{R},\ b 是残差。
通过此方法将观测点及拟合曲线绘制在同一个直角坐标系中,正常情况下可以直观地看到,观测点会均匀分布在直线附近,且每个点的残差平方和(即方差)最小。
“最小二乘法”由此得名。
2、普通最小二乘法(OLS)最小二乘法显然不只是一元线性回归那么简单,它还可以应用于多元参数的拟合。
本节将对普通最小二乘法(Ordinary Least Squares)的原理进行简单的推导和证明。
2.1、高斯—马尔可夫定理高斯—马尔可夫定理(the Gauss–Markov theorem,简称G-M定理)在给定经典线性回归的假定下,最小二乘估计量是具有最小方差的线性无偏估计量(即Best Linear Unbiased Estimator,简称BLUE)。
G-M定理共对OLS普通线性方程提出5个假设:假设1(线性关系):要求所有的母集团参数(population parameters)为常数,用来保证模型为线性关系。
最小二乘法曲线拟合算法
最小二乘法是一种常见的曲线拟合算法,其原理是通过计算样本点与拟合曲线的误差平方和最小化,得到最佳的曲线拟合结果。
以下是最小二乘法曲线拟合算法的步骤:
步骤一:选择合适的拟合函数。
通常情况下,拟合函数的选择取决于数据集的特性和需要得到的拟合效果。
例如,对于线性拟合,拟合函数可采用一次多项式函数y=kx+b;对于非线性拟合,拟合函数可能需要采用高次多项式函数或指数函数等。
步骤二:确定误差函数。
误差函数的目的是衡量样本点与拟合曲线的偏差程度。
最常用的误差函数是均方误差,即将每个样本点的实际值与相应拟合函数的输出值之间的平方误差求和,得到样本点的一般均方误差。
公式为:E = Σ(yi-f(xi))^2。
步骤三:最小化误差函数。
最小二乘法的核心就是通过求解误差函数的最小值来得到最佳的拟合曲线。
最小化误差函数可以采用梯度下降法或牛顿法等优化算法进行求解。
步骤四:得到最佳的拟合曲线。
在得到最小化误差函数的解后,即可获得最佳的拟合曲线,该曲线可用于对数据集进行预测、分类或回归等任务。
步骤五:评估拟合效果。
为了验证最佳拟合曲线的精度和泛化能力,需要将新的数据样本输入到该曲线中进行预测,并通过各种评估指标(例如均方根误差、相关系数等)来评估拟合效果。
最小二乘法曲线拟合算法是数据分析领域中的重要算法之一,可用于各种领域中的数据拟合和模型预测任务,例如气象科学、金融投资、信号处理等。
在应用过程中,需要根据实际情况灵活选择拟合函数和误差函数,同时对拟合结果进行合理的评估和优化,以获得更好的预测效果。
最小二乘法参数辨识1 引言系统辨识是根据系统的输入输出时间函数来确定描述系统行为的数学模型。
现代控制理论中的一个分支。
通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。
而系统辨识所研究的问题恰好是这些问题的逆问题。
通常,预先给定一个模型类μ={M}(即给定一类已知结构的模型),一类输入信号u和等价准则J=L(y,yM)(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择使误差函数J达到最小的模型,作为辨识所要求的结果。
系统辨识包括两个方面:结构辨识和参数估计。
在实际的辨识过程中,随着使用的方法不同,结构辨识和参数估计这两个方面并不是截然分开的,而是可以交织在一起进行的。
2 系统辨识的目的在提出和解决一个辨识问题时,明确最终使用模型的目的是至关重要的。
它对模型类(模型结构)、输入信号和等价准则的选择都有很大的影响。
通过辨识建立数学模型通常有四个目的。
①估计具有特定物理意义的参数有些表征系统行为的重要参数是难以直接测量的,例如在生理、生态、环境、经济等系统中就常有这种情况。
这就需要通过能观测到的输入输出数据,用辨识的方法去估计那些参数。
②仿真仿真的核心是要建立一个能模仿真实系统行为的模型。
用于系统分析的仿真模型要求能真实反映系统的特性。
用于系统设计的仿真,则强调设计参数能正确地符合它本身的物理意义。
③预测这是辨识的一个重要应用方面,其目的是用迄今为止系统的可测量的输入和输出去预测系统输出的未来的演变。
例如最常见的气象预报,洪水预报,其他如太阳黑子预报,市场价格的预测,河流污染物含量的预测等。
预测模型辨识的等价准则主要是使预测误差平方和最小。
非负最小二乘法计算nnls程序概述说明以及解释1. 引言1.1 概述本文将对非负最小二乘法(Nonnegative Least Squares,简称NNLS)计算程序进行概述说明和解释。
NNLS是一种常用的优化算法,广泛应用于各个领域的问题求解中。
通过最小化误差的平方和,同时约束参数为非负值,NNLS能够有效地拟合数据并提供可靠的结果。
1.2 文章结构本文分为四个部分:引言、非负最小二乘法计算NNLS程序概述、解释非负最小二乘法计算NNLS程序的要点以及结论与讨论。
在引言部分,我们会对文章主题进行简要介绍,并梳理整篇文章的结构。
在第二部分,我们将介绍非负最小二乘法的基本原理以及具体的NNLS计算程序。
第三部分将详细解释NNLS程序中关键步骤,包括输入数据处理、线性约束条件设置和迭代优化过程说明。
第四部分则会对结果进行分析与解读,并评估程序的性能,并探讨其局限性与改进方向。
1.3 目的本文旨在提供一个全面且易于理解的介绍非负最小二乘法计算NNLS程序的指南。
通过对NNLS的原理和程序细节的解释,读者能够更好地理解该方法在实际问题中的运用,并了解如何合理使用该程序以得到准确可靠的结果。
同时,本文也希望通过对程序性能和局限性的评估与讨论,为进一步改进NNLS算法提供参考意见。
2. 非负最小二乘法计算nnls程序概述2.1 非负最小二乘法简介非负最小二乘法(Non-negative Least Squares, NNLS)是一种常用的优化算法,用于解决线性方程组中的非负最小二乘问题。
它可以有效地处理具有非负约束条件的线性回归问题,并且在信号处理、图像处理、统计建模等领域得到广泛应用。
2.2 nnls程序介绍nnls程序是一种实现了非负最小二乘法算法的计算工具。
该程序能够通过迭代优化的方式,寻找一个非负的解向量,使得该解向量与观测数据之间的残差平方和达到最小。
它提供了一种快速高效的方法来求解非负线性回归问题。
最小二乘法算法最小二乘法算法最小二乘法算法是一种常用的拟合曲线方法,被广泛应用于各个领域。
它的主要思想是通过最小化误差平方和来找出数据点与构建的曲线之间的最佳匹配。
在本文中,我们将从数学原理、应用场景和优缺点等方面对最小二乘法算法进行介绍。
数学原理上,最小二乘法算法是通过最小化数据点到拟合曲线的垂直距离(又称残差)的平方和来进行拟合。
假设我们有一组数据点{(x1,y1), (x2, y2), ... (xn, yn)},我们想要找到一个函数f(x)来拟合这些数据。
最小二乘法算法通过求解下面的优化问题来找到最佳的拟合曲线:argmin Σ(yi - f(xi))^2其中,f(xi)表示在给定的x值处函数的取值,yi是对应的实际观测值。
通过求解这个优化问题,我们可以得到最佳的函数f(x),使得误差平方和达到最小。
最小二乘法算法的应用场景非常广泛。
在统计学中,它被用于回归分析,以拟合数据并估计变量之间的关系。
在金融学中,最小二乘法常用于计算资产收益率的参数估计和风险度量。
在信号处理中,最小二乘法可以用于信号去噪和参数估计。
此外,最小二乘法还在计算机视觉、机器学习和优化问题等领域得到广泛应用。
最小二乘法算法有很多优点。
首先,它具备数学原理明确、计算简单高效的特点。
其次,最小二乘法算法能够充分考虑数据点的权重,从而对观测误差进行合理的处理。
此外,最小二乘法算法还具备良好的数学性质,例如解的存在性和唯一性。
这些优点使得最小二乘法算法成为了一个被广泛接受和使用的方法。
当然,最小二乘法算法也存在一些缺点。
首先,它对异常值和离群点非常敏感。
如果数据中存在不符合模型假设的点,最小二乘法算法的拟合结果可能会受到很大影响。
此外,最小二乘法算法也存在过拟合的问题,即过度拟合训练数据而失去了对未知数据的泛化能力。
因此,在应用最小二乘法算法时,我们需要对数据进行预处理和模型选择来减少这些问题的影响。
综上所述,最小二乘法算法是一种重要的数学工具,用于数据拟合和参数估计。