矩阵位移法的计算步骤及示例
- 格式:pdf
- 大小:613.78 KB
- 文档页数:75
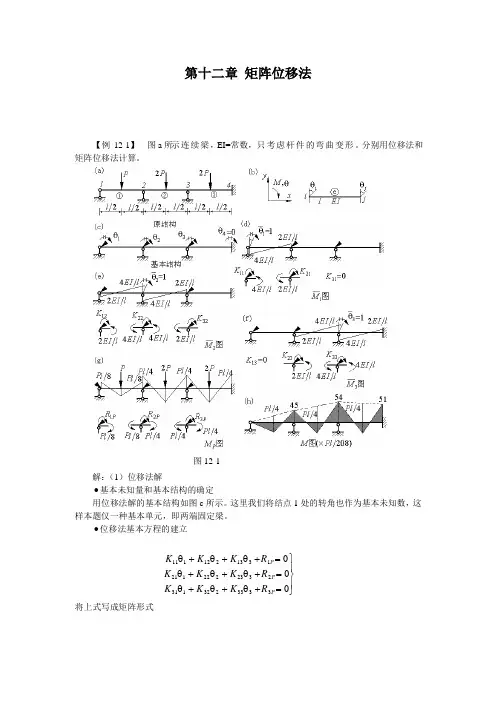
第十二章 矩阵位移法【例12-1】 图 a 所示 连 续 梁 ,EI=常数,只 考 虑 杆 件 的 弯 曲 变 形 。
分别用位移法和矩阵位移法计算。
图12-1解:(1)位移法解•基本未知量和基本结构的确定用位移法解的基本结构如图c 所示。
这里我们将结点1处的转角也作为基本未知数,这样本题仅一种基本单元,即两端固定梁。
•位移法基本方程的建立⎪⎭⎪⎬⎫=+θ+θ+θ=+θ+θ+θ=+θ+θ+θ000333323213123232221211313212111P P P R K K K R K K K R K K K 将上式写成矩阵形式⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧+⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡000321321333231232221131211P P P R R R K K K K K K K K K•系数项和自由项 计算(须绘出单位弯矩图和荷载弯矩图)由图d ,结点力矩平衡条件∑=0M ,得 EI K 411=,l EI K 221=,031=K由图e ,结点力矩平衡条件∑=0M ,得l EI K 212=,l EI l EI l EI K 84422=+=,l EI K 232=由图f ,结点力矩平衡条件∑=0M ,得 013=K ,l EI K 223=,l EI EI EI K 84433=+=由图g ,结点力矩平衡条件∑=0M ,得81Pl R p -=,2Pl R P -=,03=P R将系数项和自由项代入位移法基本方程,得⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧--+⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡0000118820282024321Pl l EI •解方程,得⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ14114162321EI Pl •由叠加法绘弯矩图,如图h 所示。
(2)矩阵位移法解•对单元和结点编号(图a ) 本题只考虑弯曲变形的影响,故连续梁每个结点只有一个角位移未知数。
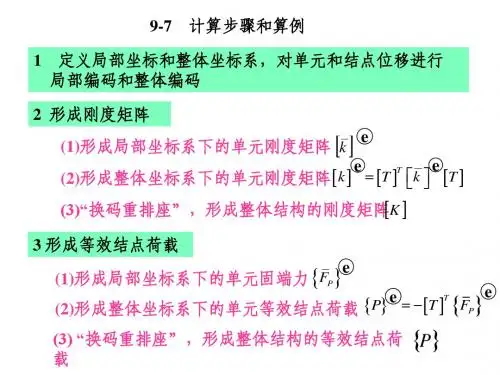

矩阵位移法解法步骤解:1)、单元及结点位移分量统一编码单元及结点位移分量编码、整体坐标系如图所示,局部坐标系横轴正向在各单元上标出。
注:编结点位移分量总码时,后处理法和先处理法有区别:采用后处理法编码时暂不考虑边界条件对支座处位移分量的限制,皆视为一般情形处理;采用先处理法时,对已知为零的位移分量总是以零编码。
对于连接于铰结点的杆端编码时,线位移采用同码,而角位移异码。
2)、形成局部坐标中单元刚度矩阵 k e:首先,计算各单元杆件的几何特征:⋯ ⋯各单元的单元刚度矩阵如下:单元①: ⋯ ⋯3)、形成整体坐标中单元刚度矩阵:(计算公式: k e = T T ke T ) 整体坐标系中的各单元刚度矩阵转换如下:单元①: ⋯ ⋯4)、集成整体刚度矩阵 K (单元集成法或直接刚度法):首先,由各单元的局部码与总码的对应关系写出各单元的定位向量如下:λ e = ⋯ ⋯ T其次,将各单元刚度矩阵 k e 按其定位向量 λ e 在整体刚度矩阵 K 中定位并累加 得整体刚度矩阵如下:K =(⋯ ⋯)5)、计算综合等效结点荷载向量 F P :①、计算局部坐标系中各杆件单元的固端力向量:F P e =(F N1F ,F Q1F ,M 1F ,F N2F ,F Q2F ,M 2F )T ②、转换整体坐标系中各杆件单元的固端力向量:{F P }e =(F x1F ,F y1F ,M 1F ,F x2F ,F y2F ,M 2F )T ③、将各杆件单元的固端力反其指向,并按其定位向量 λ e 在综合等效结点荷载向量 F P 定位并累加,得综合等效结点荷载向量如下:F P = ⋯ ⋯ T6)、计入边界条件条件,写出刚度方程并解之:刚度方程: K Δ = F P采用后处理法时,对已知为零的结点位移,在整体刚度矩阵 K 中将其所对应行列的主元素记为1,其余都变为零,然后写出刚度方程,解之。
采用先处理法时,由于在进行位移分量编码时已考虑边界条件,因而无须再计入,只写出刚度方程求解即可。
矩阵位移法
矩阵位移法是一种用于解决多项式方程组的数学方法。
它利用行和列变化将原系数矩阵转换成一个三角矩阵。
然后,从底端开始一行行解对角线的方程,最终求出未知数的值,解决多项式方程组。
矩阵位移法的基本步骤如下:
1.将系数矩阵进行行变换和列变换,转换成三角矩阵。
2.从最下面的方程开始,先求解最后一个未知数。
3.从次下面的方程开始,根据前面的结果一行行解出剩余未知数。
矩阵位移法比较容易理解和应用,可以有效地解决多项式方程组,但也存在一些缺点,比如容易出现几何错误,计算精度较低。