2.2 2.2.3 反射变换
- 格式:ppt
- 大小:853.50 KB
- 文档页数:27

反射变换-人教A版选修4-2 矩阵与变换教案一、知识点1. 反射变换的定义反射变换是将一个点关于直线对称成一个新的点,直线称为对称轴,被对称的点称为对称点。
一个点对于两条相交的直线的对称变换,可以看作是两个方向相反的反射变换。
2. 反射变换的矩阵表示以直线 y = ax + b 为对称轴,其矩阵表示为:| 1 - 2a^2 2ab |R = 1/ (| 2ab 1 - 2b^2 |)| 0 0 |3. 反射变换的性质(1)反射变换是不改变距离大小的变换,即对于直线 AB 和A’B’,点 A 到直线 AB 的距离和点A’ 到直线A’B’ 的距离是相等的。
(2)反射变换满足线性运算,即 R(x1 + x2) = R(x1) + R(x2) 以及 R(kx) =kR(x),其中 k 为常数。
(3)反射变换还具有反向性,即进行两次反射变换后还原原来的点。
二、教学设计1. 教学目标通过本节课的学习,学生将掌握反射变换的定义,矩阵表示以及性质等知识;同时,能够运用所学知识解决反射变换的相关问题。
2. 教学重点和难点(1)教学重点:反射变换的定义、矩阵表示和性质。
(2)教学难点:如何运用所学知识解决反射变换的相关问题,如求解经过反射变换后的坐标等。
3. 教学过程(1)引入通过讲解实际场景中的反射现象,如水面反射、镜面反射等,激发学生对反射变换的兴趣和认识。
(2)讲授首先,通过图示等方式,介绍反射变换的定义,以及反射变换的示例;然后,讲解反射变换的矩阵表示,帮助学生理解并掌握相应的公式;最后,讲解反射变换的性质,并结合具体的例子进行说明。
(3)例题练习针对反射变换中的相关问题,设计一系列例题,在课堂上由教师讲解,并且组织学生进行练习和答题,加深对所学知识的理解和掌握,同时锻炼学生的运用能力。
4. 课堂小结教师对学生进行带头小结,帮助学生回顾本节课所学内容,并进行归纳总结,以便学生更好地掌握知识点。
三、课堂反思针对本节课教学情况,我认为还需加强与学生的互动交流,尤其是在例题练习中,应该适当地引导学生思考和讨论,增强他们的自主思考和解决问题的能力,同时通过每节课的反思总结,不断优化和改进教学方式,提高教学质量。

傅里叶变换的例子介绍傅里叶变换是一种数学工具,用于将一个函数或信号表示为一组正弦和余弦函数的和。
它在信号处理、图像处理、物理学等领域中被广泛应用。
本文将通过几个例子来说明傅里叶变换的应用。
例子1:音频信号处理1.1 音频信号的频谱分析音频信号可以表示为一个时间域的波形,但傅里叶变换可以将其转换为频域的表示。
通过傅里叶变换,我们可以获得音频信号的频谱信息,即不同频率成分的强度。
1.2 使用傅里叶变换进行降噪处理傅里叶变换可以将信号分解为不同频率成分,因此可以通过滤除不需要的频率成分来对信号进行降噪处理。
这在音频处理中非常有用,可以去除环境噪音或其他干扰。
1.3 声音合成傅里叶变换还可以用于声音合成。
通过合成不同频率的正弦波,可以生成具有不同音高和音色的声音。
例子2:图像处理2.1 图像压缩傅里叶变换在图像压缩中起着重要的作用。
通过将图像转换到频域,可以去除高频成分,从而减小图像的大小。
这在JPEG图像压缩算法中被广泛使用。
2.2 边缘检测傅里叶变换也可以用于边缘检测。
边缘通常表示为图像中灰度变化较大的区域,而傅里叶变换可以提取出这些频域上的高频成分,从而定位图像的边缘。
2.3 图像滤波傅里叶变换还可以用于图像滤波。
通过在频域对图像进行滤波操作,可以实现对图像的模糊、锐化、增强等效果。
2.4 图像恢复当图像受到噪声或其他损坏时,傅里叶变换可以帮助我们恢复原始图像。
通过滤波和反变换操作,可以去除噪声或修复损坏的部分。
例子3:物理学应用3.1 信号分析傅里叶变换在物理学中常用于信号分析。
例如,通过对光谱信号进行傅里叶变换,可以分析出不同频率的光型,从而研究物质的光学特性。
3.2 波动方程求解傅里叶变换还可以用于求解波动方程。
通过将波动方程转换为频域,可以简化求解过程,从而得到波动方程的解析解。
3.3 反射和折射傅里叶变换也可以分析光线在不同介质中的反射和折射行为。
通过将光线的波动特性表示为频域上的分布,可以研究光在界面上的反射和透射规律。

初中数学二次反射点的概念1.引言1.1 概述引言部分是文章的开头,主要用来引出文章的主题,并简要介绍文章要探讨的内容。
对于本文《初中数学二次反射点的概念》,概述部分应该涵盖以下内容:初中数学涉及到许多几何概念和性质的学习,在其中一个重要的概念之中,我们接触到了反射点这一内容。
反射点是在数学中一个重要的概念,可应用于许多实际问题的求解,特别在几何图形以及光学等领域具有广泛的应用。
在初中数学中,我们首先会了解到反射点的定义和性质,而这篇文章将详细讨论其中一个重要的概念——二次反射点。
二次反射点是指在一个平面上的图形经过第一次反射后再次反射所得的点,它是一个关于反射在几何中的重要现象。
我们知道,光线在平面镜面上发生反射时会形成一个入射角和一个反射角,而二次反射点就是光线经过第一次反射后再次反射,所得到的点。
二次反射点的概念非常有趣,不仅可以帮助我们更好地理解光线的传播规律,还可以解决一些与光学相关的问题。
在本文的正文部分,我们将会详细探讨反射点的定义和性质,并深入研究二次反射点的概念和特点。
通过对这些内容的学习,我们可以更好地了解和应用反射点的知识,进而在实际问题中灵活运用。
通过本文的研究,我们希望能够对初中数学中的二次反射点有一个全面的认识,理解其在几何图形和光学中的应用,进一步提高数学解决问题的能力,并为将来的学习打下坚实的基础。
在接下来的正文部分,将详细介绍反射点的定义和性质以及二次反射点的概念和特点。
最后,在结论部分进行总结,并探讨二次反射点的应用和意义。
1.2文章结构文章结构部分的内容可以写为:文章结构部分旨在向读者介绍本文的组织结构和各个部分的主要内容,以帮助读者更好地理解文章的组织和思路。
本文主要分为引言、正文和结论三个部分。
引言部分首先对文章的主题进行了概述,介绍了初中数学中二次反射点的概念。
其次,引言部分阐明了文章的组织结构,明确了各部分的主要内容和目标。
最后,引言部分指出了本文的目的,即通过对二次反射点的概念的探讨,帮助读者理解和应用相关知识。


镜面反射坐标系变换1.引言1.1 概述镜面反射是物体表面光线遇到平滑表面时发生的一种光的现象。
在镜面反射中,光线遇到平滑的表面时,会沿着入射角等于反射角的方向发生反射。
这意味着光线在镜面反射中并不改变入射角的大小,可以形成清晰、明亮的反射图像。
镜面反射在日常生活中具有广泛的应用。
例如,当我们看到镜子中的自己时,就是通过镜面反射的现象实现的。
此外,镜面反射还被广泛应用于光学领域,例如激光器中的反射镜、光学显微镜中的镜面反射等。
此外,镜面反射也在光线传播和成像的研究中具有重要的意义。
坐标系变换是一种数学上的操作,用于改变物体或点的坐标表示方式。
在三维空间中,我们常常需要进行坐标系的转换,以便更好地理解和描述物体在不同坐标系下的运动和变换。
常见的坐标系变换包括平移、旋转和缩放等。
坐标系变换具有广泛的应用领域。
在计算机图形学中,坐标系变换被广泛用于三维模型的建模和渲染,可以实现物体在三维空间中的平移、旋转和缩放等变换效果。
在机器人学中,坐标系变换也起着重要的作用,可以实现机器人在不同坐标系下的运动和控制。
此外,坐标系变换还在地图制作、追踪和导航等领域中得到了广泛应用。
综上所述,镜面反射和坐标系变换是两个在光学和数学领域中非常重要的概念。
对于理解光的传播和物体运动变换等问题具有重要意义,并在实际应用中发挥着不可替代的作用。
在接下来的文章中,我们将详细介绍镜面反射和坐标系变换的定义、原理、特点和应用,希望能够帮助读者更深入地理解和应用这两个概念。
1.2 文章结构本篇长文主要包括引言、正文和结论三个部分。
在引言部分,我们将对镜面反射和坐标系变换进行概述,并明确文章的目的。
首先,我们会简要介绍镜面反射的定义、原理、特点和应用,以及坐标系变换的概述、方法和原理。
接下来,我们将说明本文的目的,即探讨镜面反射和坐标系变换的意义、影响、重要性和应用。
在正文部分,我们将详细阐述镜面反射和坐标系变换的相关内容。
首先,在镜面反射部分,我们将深入探讨镜面反射的定义和原理,通过实例和实验结果展示镜面反射的特点和应用。

反射变换的名词解释反射变换是数学中非常重要的一个概念,它在几何学、物理学和计算机图形学等领域中被广泛应用。
反射变换(Reflective transformation)指的是一个物体或图形关于某个轴或面对称的变换过程。
在这篇文章中,我将对反射变换进行详细的解释与探讨。
1. 反射变换的定义与特点反射变换是一种保持角度不变但改变方向的变换方式。
通过沿着某一轴线或平面对称,使得图形的每一个点与其对称点关于对称轴或对称面上线对称,即实现了图形的镜像效果。
反射变换通常使用一个轴或平面来进行对称操作,被称为对称轴或对称面。
2. 反射变换的应用领域2.1 几何学中的反射变换在几何学中,反射变换是重要的基础变换之一。
它常常用于解决镜像对称问题、推导几何定理、证明几何性质等。
例如,在解决关于镜子的问题时,反射变换可以帮助我们确定光线的反射方向,从而实现几何光学中的计算和分析。
2.2 物理学中的反射变换物理学中,反射变换是对光线、声波等传播方式的描述。
根据反射定律,入射光线与反射光线之间的角度相等,但方向相反。
通过对反射变换的研究,科学家可以预测和解释反射现象,如镜面反射、声波的反射等。
2.3 计算机图形学中的反射变换在计算机图形学中,反射变换是一种常用的图形变换方式。
通过反射变换,可以实现图像的对称显示,从而呈现出多种非常有趣的视觉效果。
计算机游戏、虚拟现实和动画制作等领域都广泛应用了反射变换,使得图像更加真实、逼真和美观。
3. 反射变换的数学表示数学上,反射变换可以通过矩阵乘法来表示。
对于二维空间中的点(x, y),关于对称轴y=0的反射变换可以通过以下矩阵表示实现:[1, 0][0, -1]其中,矩阵的第一行表示x坐标保持不变,第二行表示y坐标取相反数。
类似地,关于对称面x=0的反射变换可以通过以下矩阵表示实现:[-1, 0][0, 1]这样,我们可以通过矩阵运算来实现反射变换,从而对图形进行镜像处理。
4. 反射变换的意义与启示反射变换作为一种重要的数学概念,不仅在学术研究中发挥着重要作用,也广泛应用于各个领域。
高中数学中的三角函数的基本变换规律在高中数学的学习过程中,三角函数是一个重要的内容。
它们在解决几何问题、物理问题以及工程问题中发挥着重要的作用。
而要理解三角函数的性质和应用,我们首先需要掌握它们的基本变换规律。
一、平移变换规律平移是指将函数图像沿着横坐标或纵坐标方向进行平移。
对于三角函数而言,平移变换规律可以用以下形式表示:1. 正弦函数的平移变换规律:y = a*sin(b(x-c)) + d其中,a表示振幅的变化,b表示周期的变化,c表示横坐标方向的平移量,d表示纵坐标方向的平移量。
2. 余弦函数的平移变换规律:y = a*cos(b(x-c)) + d同样地,a、b、c、d分别表示振幅、周期、横坐标方向平移量和纵坐标方向平移量。
通过平移变换规律,我们可以将函数图像在平面上进行移动,从而观察到函数图像的变化。
二、伸缩变换规律伸缩是指将函数图像沿着横坐标或纵坐标方向进行拉伸或压缩。
对于三角函数而言,伸缩变换规律可以用以下形式表示:1. 正弦函数的伸缩变换规律:y = a*sin(b(x-c)) + d其中,a表示纵坐标方向的伸缩倍数,b表示横坐标方向的伸缩倍数,c表示横坐标方向的平移量,d表示纵坐标方向的平移量。
2. 余弦函数的伸缩变换规律:y = a*cos(b(x-c)) + d同样地,a、b、c、d分别表示纵坐标方向的伸缩倍数、横坐标方向的伸缩倍数、横坐标方向平移量和纵坐标方向平移量。
通过伸缩变换规律,我们可以观察到函数图像在平面上的形状发生变化,从而更好地理解函数的性质。
三、反射变换规律反射是指将函数图像沿着横坐标或纵坐标方向进行镜像。
对于三角函数而言,反射变换规律可以用以下形式表示:1. 正弦函数的反射变换规律:y = -a*sin(b(x-c)) + d其中,a表示振幅的变化,b表示周期的变化,c表示横坐标方向的平移量,d表示纵坐标方向的平移量。
2. 余弦函数的反射变换规律:y = -a*cos(b(x-c)) + d同样地,a、b、c、d分别表示振幅、周期、横坐标方向平移量和纵坐标方向平移量。

Halcon反射变换变形一、引言Halcon是一款强大的机器视觉库,提供了丰富的图像处理和分析功能。
其中,反射变换是Halcon中的一个重要功能,可以对图像进行形变操作。
本文将详细介绍Halcon中的反射变换功能,包括原理、应用场景和实现方法。
二、原理2.1 反射变换概述反射变换是指通过将图像按照某个轴进行反转,从而实现图像的形变。
在Halcon 中,可以通过指定反射变换的轴和变换类型来实现不同的图像形变效果。
2.2 反射变换的数学原理反射变换可以通过矩阵运算来表示。
假设图像的坐标为(x, y),进行水平反射变换时,可以通过以下公式计算新坐标(x’, y’):x' = -xy' = y同样地,进行垂直反射变换时,可以通过以下公式计算新坐标(x’, y’):x' = xy' = -y2.3 反射变换的实现方法在Halcon中,可以通过调用相应的函数来实现反射变换。
具体而言,可以使用flip_image函数来实现图像的反射变换。
该函数需要指定反射变换的轴和变换类型作为输入参数,并返回变换后的图像。
三、应用场景反射变换在机器视觉中有广泛的应用场景,下面列举了几个常见的应用场景。
3.1 图像翻转图像翻转是反射变换的一种简单应用,可以将图像沿水平或垂直方向进行翻转。
通过图像翻转可以实现镜像效果,常用于图像处理和设计中。
3.2 物体识别在物体识别中,反射变换可以用于对图像进行形变,从而提高物体识别的准确性。
通过反射变换,可以将物体在不同角度下的图像进行对齐,减少干扰因素,提高识别率。
3.3 视觉导航在视觉导航中,反射变换可以用于对图像进行形变,从而实现对目标物体的跟踪和定位。
通过反射变换,可以将目标物体在不同视角下的图像进行对齐,减少干扰因素,提高导航的准确性。
3.4 图像拼接在图像拼接中,反射变换可以用于对图像进行形变,从而实现不同图像的无缝拼接。
通过反射变换,可以将不同图像的边缘进行对齐,减少拼接的瑕疵,提高拼接的质量。

三角函数的基本变换平移伸缩和反射三角函数的基本变换:平移、伸缩和反射三角函数是数学中非常重要且广泛应用的概念之一。
它们在几何、物理、工程学等领域中起着关键作用。
在学习三角函数时,我们经常会遇到一些基本的函数变换,比如平移、伸缩和反射。
本文将介绍三角函数的这些基本变换,帮助读者更好地理解和应用这些概念。
一、平移变换平移是指图形在平面内沿着某个方向移动一段距离。
在三角函数中,平移变换是指将函数图像沿着横轴或纵轴方向移动,改变函数的位置。
对于正弦函数sin(x)来说,平移变换可以表示为sin(x-a),其中a为平移的距离和方向。
当a为正数时,函数图像向右平移 |a| 个单位;当a为负数时,函数图像向左平移 |a| 个单位。
对于余弦函数cos(x)来说,平移变换可以表示为cos(x-a),同样地,当a为正数时,函数图像向右平移 |a| 个单位;当a为负数时,函数图像向左平移 |a| 个单位。
二、伸缩变换伸缩是指图形的尺寸在某个方向上改变。
在三角函数中,伸缩变换是指将函数图像在横轴或纵轴方向上进行拉伸或压缩,改变函数的振幅和周期。
对于正弦函数sin(x)来说,伸缩变换可以表示为a*sin(x),其中a为正实数。
当a大于1时,函数图像在纵轴方向上被拉伸;当0 < a < 1时,函数图像在纵轴方向上被压缩。
对于余弦函数cos(x)来说,伸缩变换可以表示为a*cos(x),同样地,当a大于1时,函数图像在纵轴方向上被拉伸;当0 < a < 1时,函数图像在纵轴方向上被压缩。
伸缩变换还可以改变函数的周期。
对于正弦函数和余弦函数来说,原本的周期是2π。
通过伸缩变换,可以改变函数的周期为2π/a,其中a为正实数。
三、反射变换反射变换是指图形关于某个轴线对称。
在三角函数中,反射变换是指将函数图像关于横轴或纵轴进行翻转,改变函数的正负号。
对于正弦函数sin(x)来说,反射变换可以表示为-sin(x)。
反射变换
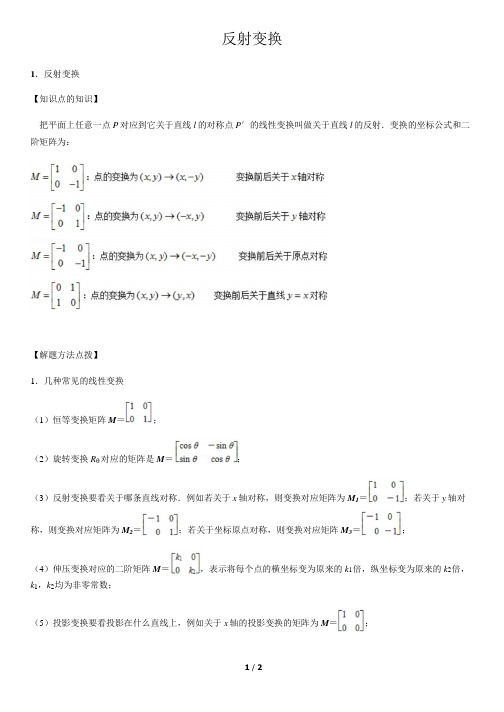
1.反射变换
【知识点的知识】
把平面上任意一点P 对应到它关于直线l 的对称点P′的线性变换叫做关于直线l 的反射.变换的坐标公式和二阶矩阵为:
【解题方法点拨】
1.几种常见的线性变换
(1)恒等变换矩阵M=;
(2)旋转变换Rθ对应的矩阵是M=;
(3)反射变换要看关于哪条直线对称.例如若关于x 轴对称,则变换对应矩阵为M1=;若关于y 轴对称,则变换对应矩阵为M2=;若关于坐标原点对称,则变换对应矩阵M3=;
(4)伸压变换对应的二阶矩阵M=,表示将每个点的横坐标变为原来的k1 倍,纵坐标变为原来的k2 倍,k1,k2 均为非零常数;
(5)投影变换要看投影在什么直线上,例如关于x 轴的投影变换的矩阵为M=;
1/ 2
(6)切变变换要看沿什么方向平移,若沿x 轴平移|ky|个单位,则对应矩阵M=,若沿y 轴平移|kx|个单位,则对应矩阵M=.(其中k 为非零常数).
2.线性变换的基本性质
设向量α=,规定实数λ与向量α的乘积λα=;设向量α=,β=,规定向量α与β的和α+β=.
(1)设M是一个二阶矩阵,α、β是平面上的任意两个向量,λ是一个任意实数,则①M(λα)=λMα,②M
(α+β)=Mα+Mβ.
(2)二阶矩阵对应的变换(线性变换)把平面上的直线变成直线(或一点).
2/ 2。

312.1.1矩阵的概念三维目标 1.知识与技能⑴了解矩阵产生的背景,并会用矩阵表示一些实际问题.⑵了解矩阵的相关知识,如行、列、元素,零矩阵的意义及表示. 2.过程与方法在大量举例的基础上引出矩阵的概念和表示方法,使学生认识到矩阵的实际背景,并让学生举出一些可以用矩阵形式表示的实际例子,深化对矩阵概念的认识.3.情感、态度与价值观以已有知识为平台,结合实例,创设良好情境,调动学生学习的积极性,发挥学生的主动性.让学生体会到矩阵从实际产生,并在实际的问题中有着广泛的应用,使得他们感悟到数学的抽象更有助于人们对问题的思考与解决.重点与难点 矩阵的概念 教学过程 一、设置情境情境一、向量如图所示,已知点O (0,0), P (1,3)向量),3,1(= 如果 把的坐标排成一排,那么 可以用右边的表来表示,并简记为⎥⎦⎤⎢⎣⎡31.如果把表中的说明舍弃,将表中的数据按原来的位置排成一张矩形数表,简记为⎥⎦⎤⎢⎣⎡112145130109142125 情境三、运动会的成绩4-23m32如果把表中的说明舍弃,将表中的数据按原来的位置排成一张矩形数表,简记为⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡142323214232325541143113 情境四、将方程组中未知数x ,y ,z 的系数按原来的次序排列就下表,简记为⎥⎦⎤⎢⎣⎡-42332m ⎩⎨⎧=+-=++2423132z y x mz y x 二、建构数学 1.矩阵的概念 我们把形如⎥⎦⎤⎢⎣⎡31,⎥⎦⎤⎢⎣⎡-42332m ,⎥⎦⎤⎢⎣⎡112145130109142125这样的矩形数表(或字母)阵列称做矩阵,一般地用大写黑体拉丁字母A ,B ,…或者(a ij )来表示矩阵,其中i,j 分别表示元素a ij 所在的行与列.同一横排中按原来顺序排列的一行数(或字母)叫做矩阵的行,同一竖排中按原来顺序排列的一行数(或字母)叫做矩阵的列,而组成矩阵的每一个数(或字母)称为矩阵的元素.2.矩阵的分类(按照行与列来分)⎥⎦⎤⎢⎣⎡31记为2×1矩阵,⎥⎦⎤⎢⎣⎡-42332m 记为2×3矩阵. 3.几个特殊矩阵所有元素都为零的矩阵叫做零矩阵. 我们把像[]131211a a a 这样只有一行的矩阵称为行矩阵,而把像⎥⎦⎤⎢⎣⎡1211a a 这样只有一列的矩阵称为列矩阵,并用希腊字母α,β,γ,来表示列矩阵.4.矩阵的相等对于两个矩阵A ,B 只有当A ,B 的行数与列数分别相等,并且对应位置的元素也分别相等时,A 和B 才相等,此时记为A =B .5.行向量与列向量平面上的向量a =(x,y)的坐标和平面上的点P(x,y)都可以看做是行矩阵[]y x ,也可以看成列矩阵⎥⎦⎤⎢⎣⎡yx .因此,我们将[]y x称为行向量,⎥⎦⎤⎢⎣⎡y x 称为列向量.习惯上,我们把平面向量(x,y)的坐标写成列向量⎥⎦⎤⎢⎣⎡yx 的形式.三、数学应用例1 用矩阵表示下图中的ΔABC ,其中A(-1,0),B(0,2),C(2,0). 解:因为ΔABC 由点A ,B ,C 唯一确定,点A ,B ,C 可以分别由列向量 ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-=02,20,01来表示,所以ΔABC 可表示为⎥⎦⎤⎢⎣⎡-=02201思考:如果像例1中那样用矩阵⎥⎦⎤⎢⎣⎡0224310表示平面中的图形,那么该图形有什么几何特征?等腰梯形(数形结合)例2 已知A =⎥⎦⎤⎢⎣⎡-243x ,B =⎥⎦⎤⎢⎣⎡-21z y ,若A =B ,试求x,y,z. 分析:抓住相等的条件即可4,3,1===z y x四、课堂练习1.设矩阵A 为二阶矩阵,且规定其元素2,1,2;1,2ij a i j i j =+==,则A= 2 35 6⎡⎤⎢⎥⎣⎦2.由矩阵1 1 21 2 2⎡⎤⎢⎥⎣⎦所表示的三角形的面积是12 3.已知32 x-3y 1 7,x+y x-y a b x y A B +-⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦,若A=B ,则x y a b +++= 1 五、回顾总结1. 矩阵的概念2.几个特殊矩阵3.矩阵的相等4.行向量与列向量 六、课外作业1.已知A(3,1),B(5,2),则表示AB 的列向量为21⎡⎤⎢⎥⎣⎦2.方程组32426x y x y +=⎧⎨-=⎩中,x y 的系数按原有次序排列,可得到矩阵是 3 22 -1⎡⎤⎢⎥⎣⎦3.某东西方向十字路口的红绿灯时间设置如下:绿灯30S ,黄灯3S ,红灯20S ,如果分别用1,0,—1表示绿灯、黄灯、红灯,试用23⨯矩阵表示该路口的时间设置为1 0 -130 3 20⎡⎤⎢⎥⎣⎦4.设矩阵A 为33⨯矩阵,且规定其元素,,ij ij i ja i j i j=⎧=⎨+≠⎩,其中,1,2,3i j =,那么A 中所有元素之和为 385.已知 1 4 1 4x+3 y 2y+7 y x y -+⎡⎤⎡⎤=⎢⎥⎢⎥⎣⎦⎣⎦,则x y += -26.由矩阵1 3 3 11 2 3 4⎡⎤⎢⎥⎣⎦表示平面中的图形的面积为 4 。

五种傅里叶变换方法标题:探究五种傅里叶变换方法摘要:傅里叶变换在信号处理、图像处理和通信等领域中发挥着重要的作用。
本文将深入探讨五种常见的傅里叶变换方法,包括离散傅里叶变换(DFT)、快速傅里叶变换(FFT)、连续傅里叶变换(CFT)、反射谱傅里叶变换(RFT)和多维傅里叶变换(MDFT)。
通过分析每种方法的原理、特点和应用领域,我们将能够更好地理解傅里叶变换的概念和实际应用。
第一节:离散傅里叶变换(DFT)1.1 原理和定义1.2 算法与实现1.3 应用场景和优缺点第二节:快速傅里叶变换(FFT)2.1 原理和特点2.2 快速傅里叶变换算法2.3 应用领域和性能分析第三节:连续傅里叶变换(CFT)3.1 连续傅里叶变换的数学定义3.2 傅里叶级数和傅里叶变换的关系3.3 应用场景和限制第四节:反射谱傅里叶变换(RFT)4.1 RFT的概念和目的4.2 数学定义和算法4.3 在信号处理中的应用案例第五节:多维傅里叶变换(MDFT)5.1 MDFT的概念和性质5.2 空间和频率域的转换5.3 在图像处理和通信中的应用总结和回顾性内容:本文深入探讨了五种傅里叶变换方法,从离散傅里叶变换(DFT)开始,通过介绍快速傅里叶变换(FFT)、连续傅里叶变换(CFT)、反射谱傅里叶变换(RFT)和多维傅里叶变换(MDFT),我们在深度和广度上对傅里叶变换有了更全面、深入的理解。
每种方法都有自己的原理、特点和应用领域,我们可以根据具体需求选择适合的方法。
傅里叶变换在信号处理、图像处理、通信和其他领域中起着关键作用,通过学习这些方法,我们可以更好地应用傅里叶变换来分析和处理实际问题。
个人观点和理解:傅里叶变换是一种重要的数学工具,能够将一个信号分解为一系列不同频率的正弦和余弦函数。
离散傅里叶变换(DFT)是傅里叶变换在数字信号处理中的离散形式,它通过将信号离散化来实现,适用于离散信号的频域分析。
快速傅里叶变换(FFT)是一种高效计算DFT的算法,它通过利用对称性和重叠子问题来减少计算量,广泛应用于信号处理和频谱分析中。

第2章 仿射变换2.1 平行射影 知识点解析平行射影:对应点之间的连线互相平行.平行射影与方向有关,方向变了,就得出了另外的透视仿射. 仿射对应:有限次平行射影的复合就是一个仿射对应. 仿射变换:平面π到自身的仿射对应,称为仿射变换.平行射影把点映成点,把直线映成直线,这叫做平行射影的保持同素性. 点与线的结合性质在平行射影下保持不变.仿射对应也保持同素性与结合性.即,仿射对应把点映成点,把直线映成直线.若A 在a 上,则A '在a '上.注意:仿射对应不一定是平行射影,即,原象点与象点之间的连线不一定平行,反过来,平行射影一定是仿射对应.解题指导 练习2-11. 试举例说明在一般仿射对应下,二直线上的对应点的连线不一定是平行的. 解 设1T 为1a 到2a 的平行射影,2T 为2a 到3a 的平行射影,取3a 为1A 到2A 的延长线,取2A 与3A 重合,显 然,在1a 到3a 的仿射对应3112:a a T T →下,直线1a 和3a 上 的对应点的连线31A A 和31B B 不平行.2.在仿射对应下,若对应点之间连线相互平行,试问仿射对应是不是平行射影? 解 由平行射影定义,对应点之间的连线平行于已知直线l ,即与方向l 平行,又因为对应点之间的连线平行,所以,对应点之间的连线都平行于方向l ,因此,是平行射影.3.在仿射对应下,圆的象是什么? 解 椭圆.2.2 仿射不变性与不变量1A 2A 3A 1a 2a 3a 1B2B 3B 题图第1经过平行射影不改变的性质和数,叫做仿射不变性质和仿射不变量. 经过仿射对应,它们也是不变的. 同素性和结合性都是仿射不变性质. 仿射对应把共点的线变成共点的线. 仿射对应把共线的点变成共线的点.定理2.1 二直线间的平行性是仿射不变性质.即,两条平行直线经过仿射对应后仍然是平行直线.推论2.2 平行四边形在仿射对应下还是平行四边形.即,平行四边形经过仿射对应后仍然是平行四边形.定义2.1 简比(单比).BCACABC =)( 有向线段的数量之比. (1) 当C 在A ,B 之间时,0)(<ABC ; (2) 当C 在A ,B 之外时,0)(>ABC ; (3) 当A C =时,0)(=ABC ; (4) 当B C =时,∞=)(ABC .定理2.3 共线三点的简比是仿射不变量.即,共线三点的简比在仿射对应下不变.定理2.4 两条平行线段的比是仿射不变量.即,两条平行线段的比在仿射对应下不变.定理2.5 直线上两条线段的比是仿射不变量.即直线上两条线段的比在仿射对应下不变.注意:一般地,任意两条线段的比,不是仿射不变量.即,如果两条线段不平行,则它们的比在仿射对应下会改变.定理2.7 在仿射对应下,任何一对对应三角形面积之比等于常数.即,任意两个三角形面积之比是仿射不变量.推论2.8 任意两个多边形面积之比是仿射不变量.因此,任意两个图形面积之比是仿射不变量.A B C图定义1.2补充题 证明定理2.5 直线上两条线段的比是仿射不变量.证明 如图,DC D A CD AD ''''=, 其中 CD CD BC AB CD AD ++=11+''''+=++=D C C B CD AB CD BC CD AB 1+''''+''''=''''+''+''=''''D C C B D C B A D C D C C B B A D C D A所以D C B A CD AB ''''=. 练习2-21.证明:三角形的重心具有仿射不变性.解 因为共线三点的简比具有仿射不变性,所以,仿射对应把三角形中点变成中点;同素性和结合性都是仿射不变性质,仿射对应把共点的线变成共点的线,仿射对应把共线的点变成共线的点,所以,仿射对应把三角形的重心变成三角形重心.2.证明:平行四边形的重心具有仿射不变性. 解 同第1题.3.证明:梯形在仿射对应下仍为梯形.解 因为二直线的平行性是仿射不变性,所以,仿射对应把梯形的上下底变成梯形的上下底,因此,梯形在仿射变换下仍然变成梯形.4.证明:任意两个多边形面积之比是仿射不变量.解 将多边形划分成n 个三角形1S ,Λ,2S ,n S ,对应的划分得到对应的三角形1S ',Λ,2S ',n S ',由定理2.7,在仿射对应下,任何一对对应三角形面积之比等于常数.即,任意两个三角形面积之比是仿射不变量,所以有k S S S S S S nn ='=='='Λ2211,于是)(212121n n n S S S k S k S k S k S S S '++'+'='++'+'=+++ΛΛΛ 即k S S S S S S n n='++'+'+++ΛΛ2121A B C DA 'B 'C 'D '补充题图所以,任意两个多边形面积之比是仿射不变量.5.已知平面上的一条定直线l ,P 为平面上的任意一点,P 点的对应点P '是点P 关于直线l 的对称点,这种变换称为反射变换,定直线叫做它的轴.试证明:反射变换是仿射变换.解 因为平面上关于反射轴的对称点是唯一确定的,反射变换是平面到自身内的一一对应,所以,由仿射变换的定义,反射变换是仿射变换.2.3 仿射变换的代数表达式知识点解析定理2.9 在仿射坐标系下,设共线三点A ,B ,C 的坐标为),(11y x ,),(22y x ,),(33y x ,则三点的交比为23132313)(y y y y x x x x BC AC ABC --=--==定理2.10 不共线的三对对应点决定唯一一个仿射变换.(见习题2-3第4题). 解题指导 练习2-31.在仿射坐标系下,证明直线的方程是一次方程. 证明 [关键] 利用仿射变换的式 ⎩⎨⎧++='++='ya x ab y ya x a a x 22211211[技巧]设直线方程b x k y '+'=',将仿射变换代入. 这时,得b y a x a a k y a x a b '+++=++)(12112221 整理得122212222111ka a b b ka x ka a a ka y -'+-+--=可见,仍为直线方程,即一次方程.2.求使三点)0,0(,)1,1(,)1,1(-的对应点分别为)3,2(,)5,2(,)7,3(-的仿射变换式.解 [关键] 将每对对应点分别代入仿射变换公式⎩⎨⎧++='++='y a x a b y ya x a a x 22211211 [注意] 仿射变换把点),(y x 变成),(y x ''时,有⎩⎨⎧++='++='ya x ab y ya x a a x 22211211 将每对对应点分别代入仿射变换公式⎩⎨⎧++='++='y a x a b y ya x a a x 22211211 得⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧-+=--+=++=++===2221121122211211735232a a b a a a a a b a a a b a解得⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧=-=-====6214213222122111a a a a b a代入仿射变换式,得所求的仿射变换式⎪⎩⎪⎨⎧+-='-+='yx y yx x 643212123.利用仿射变换的表达式证明:直线上三点的简比是仿射不变量. 证明 [关键] 利用仿射变换的式⎩⎨⎧++='++='ya x ab y ya x a a x 22211211设三点),(11y x A ,),(22y x B ,),(33y x C 在仿射变换下分别变成),(11y x A ''',),(22y x B ''',),(33y x C ''',代入仿射变换式 ⎩⎨⎧++='++='ya x ab y ya x a a x 22211211 得322321322222121221211312311321221121121111y a x a b y y a x a b y y a x a b y y a x a a x y a x a a x y a x a a x ++='++='++='++='++='++='于是)()()()(23122311131213112313y y a x x a y y a x x a x x x x -+--+-='-''-' (*) 由定理2.9,k x x x x y y y y =--=--23132313即,)(2313y y k y y -=-,)(2313x x k x x -=-,代入(*)式得k y y a x x a y y k a x x k a x x x x =-+--+-='-''-')()()()(23122311231223112313同理k y y a x x a y y k a x x k a y y y y =-+--+-='-''-')()()()(23222321232223212313所以23132313x x x x y y y y '-''-'='-''-'即,直线上三点的简比是仿射不变量.4.利用解析方法证明:不共线的三对对应点决定一个仿射变换.证明 [关键] 利用仿射变换的式⎩⎨⎧++='++='ya x ab y ya x a a x 22211211设不共线的三点),(11y x A ,),(22y x B ,),(33y x C 在仿射变换下分别变成),(11y x A ''',),(22y x B ''',),(33y x C ''',代入仿射变换式 ⎩⎨⎧++='++='ya x ab y y a x a a x 22211211 得⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧++='++='++='++='++='++='322321331231132222212212211212212111121111y a x a b y y a x a a x y a x a b y y a x a a x ya x ab y y a x a a x 注意:三对对应点的坐标为已知数,a ,b ,11a ,12a ,21a ,22a 为未知数,写成矩阵形式为⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡''''''2221121133332222111133221110000011000000110000001a a b a a a y x y x y x y x y x y x y x y x y x 记作AX b =计算得212131312)])(())([(y y x x y y x x A ------= 这里0≠A ,因为如果0=A ,则0))(())((12131312=-----y y x x y y x x即12131213x x x x y y y y --=--这时),(11y x A ,),(22y x B ,),(33y x C 三点共线,与已知这三点不共线矛盾. 所以0≠A .于是,方程组AX b =有唯一解.即,不共线三对对应点决定一个仿射变换.5.利用仿射变换导出椭圆12222=+by a x 的面积公式. 解 仿射变换把圆变成椭圆. 如图.由推论2.8,任意两个 图形面积的比是仿射不变量,有C B A ABCS S S S '''∆∆=椭圆圆b a rr S r ⋅⋅⋅⋅=2212212椭圆π于是ab S π=椭圆.2.4 仿射变换的特例知识点解析 1. 平移变换把点),(y x P 平移到点),(y x Q '',坐标关系式为⎩⎨⎧+='+='b y y ax x 平移变换保持线段的长度不变. 2.旋转变换以原点)0,0(O 为旋转中心,旋转角为θ,点),(y x P 旋转后变成),(y x P ''',坐标关系题图第5式为⎩⎨⎧+='-='θθθθcos sin sin cos y x y y x x其中⎥⎦⎤⎢⎣⎡-=θθθθcos sin sin cos A满足I A A A A ='=',即,A 为正交矩阵. 3. 反射变换在平面上取一定直线l ,使平面上的点P 对应到它关于直线l 的对称点P ',这样的变换叫做反射变换.直线l 上的点都是自对称点,称为反射变换的不动点. 直线l 称为反射对称轴. 坐标关系式为⎩⎨⎧-='='yy xx4.位似变换在平面上取一定点O 和一个非0常数k ,使O 对应自己,其它的点P 对应P ',三点O ,P ,P '在一条直线上,简比为k P OP =')(,⎩⎨⎧='='kyy kxx位似变换把直线变成与之平行的直线,把图形变成相似形. 解题指导 练习2-41.求把点)3,0(变为点)4,2(-的平移变换,并将平移变换作用于曲线06432=--+y x x .解 [关键] 将)3,0(P 和)4,2(-'P 代入平移变换公式⎩⎨⎧+='+='by y ax x .得⎩⎨⎧+=+=-ba3402解得⎩⎨⎧=-=12b a于是,所求的平移变换为⎩⎨⎧+='-='12y y x x将平移变换作用于曲线06432=--+y x x ,就是将变换⎩⎨⎧+='-='12y y x x 的x ,y 解出来代入06432=--+y x x ,代入得08472=+'-'+'y x x2.求把点)3,2(-变为点)3,2(-的旋转变换,并将旋转变换作用于曲线06432=--+y x x .解 把)3,2(-P 和)3,2(-'P 代入旋转变换公式⎩⎨⎧+='-='θθθθcos sin sin cos y x y y x x得⎩⎨⎧+-=---=θθθθcos 3sin 23sin 3cos 22解得0sin =θ, 1cos -=θ 再代入旋转变换公式得⎩⎨⎧-='-='y y xx将这个变换作用于曲线06432=--+y x x ,就是将变换⎩⎨⎧-='-='yy xx 的x ,y 解出来代入06432=--+y x x ,代入得06432=-'+'-'y x x3.求中心在原点,半轴分别为1和2并以直线025=-y x 为对称轴的椭圆方程. 解 1=a ,2=b ,中心在原点的椭圆方程为1422=+y x对称轴为025=-y x ,即x y 52=,这时,25tan ==θk于是292tan 11cos 2=+=θθ,295cos 1sin 2=-=θθ,所以,旋转方程为⎪⎪⎩⎪⎪⎨⎧+='-='292295295292y x y y x x于是⎪⎪⎩⎪⎪⎨⎧'+'='+'=292295295292y x y y x x 代入1422=+y x ,得0116601044122=-''+'+'y x y x .4.证明:位似变换把直线变成直线.证明 [关键]设直线b ax y +=,从位似变换⎩⎨⎧='='ky y kx x 中解出x ,y 代入直线b ax y +=内.代入得kb x a y +'='显然仍为一条直线.5.证明:位似变换把直线变成与自己平行的直线.证明 由第4题结果可知,位似变换把直线b ax y +=变成直线kb x a y +'=',因为斜率都为a ,所以二者平行.。


22. 如何进行坐标系的反射变换?关键信息项:1、反射变换的定义和类型名称:____________________________描述:____________________________2、反射变换的数学表达式公式:____________________________变量含义:____________________________3、反射变换在不同坐标轴上的应用X 轴反射:____________________________Y 轴反射:____________________________Z 轴反射:____________________________4、反射变换的矩阵表示矩阵形式:____________________________元素计算方法:____________________________5、反射变换的几何意义图形变化特点:____________________________对图形性质的影响:____________________________6、反射变换的实际应用场景例子:____________________________应用领域:____________________________11 反射变换的定义反射变换是一种几何变换,它将一个点或图形关于某一轴线或平面进行对称翻转。
这种变换可以在二维坐标系和三维坐标系中进行。
111 二维坐标系中的反射变换在二维平面中,常见的反射变换有关于 x 轴和 y 轴的反射。
112 三维坐标系中的反射变换在三维空间中,除了关于x、y、z 轴的反射,还有关于平面的反射,如 xy 平面、yz 平面、zx 平面等。
12 反射变换的类型反射变换可以分为轴反射和平面反射。
轴反射是关于直线的反射,平面反射是关于平面的反射。
21 反射变换的数学表达式对于二维坐标系中的点(x, y),关于 x 轴的反射变换为(x, y),关于 y 轴的反射变换为(x, y)。

线性代数中的正交变换及其应用在数学领域中,线性代数是一个重要的分支,它被广泛应用于计算机科学、计算机图形学、信号处理等领域。
而正交变换是线性代数的一个重要概念,也是许多应用中必不可少的一部分。
正交变换是指一个变换把一个向量变换为另一个向量,使得它们保持正交关系和长度不变。
也就是说,正交变换不会改变向量之间的夹角和长度大小,而只是改变它们在空间中的位置。
正交变换包括旋转、镜像和反射等操作。
它们常被用在三维计算机图形学中,用于让物体沿着不同的方向旋转或翻转,从而达到展示不同视角的效果。
同时,正交变换还被用于方程组求解、信号处理以及图像压缩等领域中。
下面我们以三维计算机图形学中的应用为例,来展示正交变换的一些操作和应用:1. 旋转变换在三维计算机图形学中,旋转变换是应用最为广泛的正交变换之一。
它可以通过对向量进行正交旋转来改变物体在空间中的位置和方向,并呈现不同的视角效果。
例如,我们将一个位于空间中的球体进行旋转变换,可以让它沿着不同的方向自转,并呈现不同的视角。
这在电影制作、游戏开发等领域中被广泛应用。
2. 镜像变换镜像变换是指将物体沿着平面进行对称操作,从而得到物体的反射形态。
这个操作在计算机图形学中非常常见,例如,我们可以将一个物体进行左右翻转、上下翻转等操作,从而得到不同的视角和形态。
在实际应用中,镜像变换还被用于图像压缩和数据压缩领域。
例如,我们可以将一个图像进行左右翻转,并保证它的质量不会受到影响,从而达到减小图像体积的效果。
3. 反射变换反射变换是指将向量沿着平面进行对称操作,成为另外一个向量。
这个操作在计算机图形学中也是比较常见的,例如,我们可以将一个物体进行镜像反射,从而得到其在空间中的另一个位置。
同时,反射变换还被用于线性方程组的求解、信号处理等领域。
综上所述,正交变换是线性代数中非常重要的一个概念,它在计算机图形学、信号处理、方程组求解等领域中都得到了广泛的应用。
通过使用正交变换,我们可以轻松地改变物体在空间中的位置和方向,从而达到不同的视角效果。

41. 坐标系中的反射变换如何应用?关键信息项1、反射变换的定义和类型平面反射变换空间反射变换2、反射变换的数学表达式平面直角坐标系中的表达式空间直角坐标系中的表达式3、反射变换的几何意义图形的对称性质对称轴的确定4、应用领域物理学中的应用计算机图形学中的应用工程设计中的应用5、实例分析具体物理问题的解决图形设计中的案例工程结构的优化11 反射变换的定义和类型反射变换是一种几何变换,它将一个图形沿着某条直线或平面进行翻转,使得图形在直线或平面的另一侧形成镜像。
在坐标系中,反射变换可以分为平面反射变换和空间反射变换。
111 平面反射变换在平面直角坐标系中,平面反射变换通常是关于 x 轴、y 轴或某条直线的反射。
例如,关于 x 轴的反射,点(x, y) 经过反射后变为(x, y);关于 y 轴的反射,点(x, y) 变为(x, y)。
112 空间反射变换在空间直角坐标系中,空间反射变换可以是关于平面的反射,如关于 xoy 平面、yoz 平面或 xoz 平面的反射。
此外,还可以是关于任意给定平面的反射。
12 反射变换的数学表达式反射变换可以用数学表达式来精确描述。
121 平面直角坐标系中的表达式对于关于 x 轴的反射,其变换矩阵为 1 0; 0 -1;关于 y 轴的反射,变换矩阵为-1 0; 0 1。
对于关于直线 y = x 的反射,变换矩阵为 0 1;1 0。
122 空间直角坐标系中的表达式在空间直角坐标系中,关于 xoy 平面的反射变换矩阵为 1 0 0; 0 1 0; 0 0 -1,关于 yoz 平面的反射变换矩阵为-1 0 0; 0 1 0; 0 0 1,关于 xoz 平面的反射变换矩阵为 1 0 0; 0 -1 0; 0 0 1。
13 反射变换的几何意义反射变换具有重要的几何意义。
131 图形的对称性质通过反射变换,可以揭示图形的对称性质。
例如,一个图形如果在某条直线或平面的反射下与自身重合,那么它具有相应的轴对称或面对称性质。