ANSYS-球轴承-接触力学(转载)
- 格式:pdf
- 大小:328.61 KB
- 文档页数:6


ANSYS接触问题的计算方法及参数设置接触问题的关键在于接触体间的相互关系(废话,),此关系又可分为在接触前后的法向关系与切向关系法向关系:在法向,必须实现两点:1)接触力的传递。
2)两接触面间没有穿透。
ANSYS通过两种算法来实现此法向接触关系:罚函数法和拉格朗日乘子法。
1.罚函数法是通过接触刚度在接触力与接触面间的穿透值(接触位移)间建立力与位移的线性关系:接触刚度*接触位移=法向接触力对面面接触单元17*,接触刚度由实常数FKN来定义。
穿透值在程序中通过分离的接触体上节点间的距离来计算。
接触刚度越大,则穿透就越小,理论上在接触刚度为无穷大时,可以实现完全的接触状态,使穿透值等于零。
但是显而易见,在程序计算中,接触刚度不可能为无穷大(否则病态),穿透也就不可能真实达到零,而只能是个接近于零的有限值。
以上力与位移的接触关系可以很容易地合并入整个结构的平衡方程组K*X=F 中去。
并不改变总刚K的大小。
这种罚函数法有以下几个问题必须解决:1)接触刚度FKN应该取多大?2)接触刚度FKN取大些可以减少虚假穿透,但是会使刚度矩阵成为病态。
3)既然与实际情况不符合的虚假穿透既然是不可避免的,那么可以允许有多大为合适?因此,在ANSYS程序里,通常输入FKN实常数不是直接定义接触刚度的数值,而是接触体下单元刚度的一个因子,这使得用户可以方便地定义接触刚度了,一般FKN 取0.1到1中间的值。
当然,在需要时,也可以把接触刚度直接定义,FKN输入为负数,则程序将其值理解为直接输入的接触刚度值。
对于接近病态的刚度阵,不要使用迭代求解器,例如PCG等。
它们会需要更多的迭代次数,并有可能不收敛。
可以使用直接法求解器,例如稀疏求解器等。
这些求解器可以有效求解病态问题。
穿透的大小影响结果的精度。
用户可以用PLESOL,CONT,PENE来在后处理中查看穿透的数值大小。
如果使用的是罚函数法求解接触问题,用户一般需要试用多个FKN值进行计算,可以先用一个较小的FKN值开始计算,例如0.1。
13 深沟球轴承接触分析13.1 实践任务和目的滚动轴承的刚度、接触应力及寿命是工程应用中关心的热点问题。
滚动轴承接触分析的困难在于滚动体与圈体的接触,滚动体在载荷为0的情况下与圈体接触为一点,随着载荷的增大,点接触变为面接触。
接触区域的位置、大小、形状、接触面压力及摩擦力分布等接触参数在分析前未知,它们随外载荷变,是典型的边界非线性问题。
深沟球轴承结构简单、使用方便,是生产批量最大、应用范围最广的一类轴承。
本实验以618/5深沟球轴承为代表,利用ansys软件的建立深沟球轴承的三维有限元模型。
通过加载边界条件,进行面-面接触分析,得出轴承的接触应力分布。
轴承弹性模量E=210GPa,泊松比0.3,作用在轴承上的力P=3.472Mpa。
13.2 实验环境Ansys14.0及其以上版本软件,win7以上版本操作系统13.3 实践准备接触问题是一种高度非线性行为,需要较大的计算资源,为了进行有效的计算,理解问题的特性和建立合理的模型是很重要的。
接触问题分为两种基本类型:刚体─柔体的接触,柔体─柔体的接触,在刚体─柔体的接触问题中,接触面的一个或多个被当作刚体,(与它接触的变形体相比,有大得多的刚度),一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体─柔体的接触,许多金属成形问题归为此类接触;另一类,柔体─柔体的接触,是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
1)接触分析的基本概念①接触协调因为实际接触体相互不穿透,Ansys在这两个接触面间建立一种关系,防止它们在有限元分析中相互穿过。
将程序防止接触面间相互穿透作用称为强制接触协调。
如果没有强制接触协调,接触面间会发生穿透。
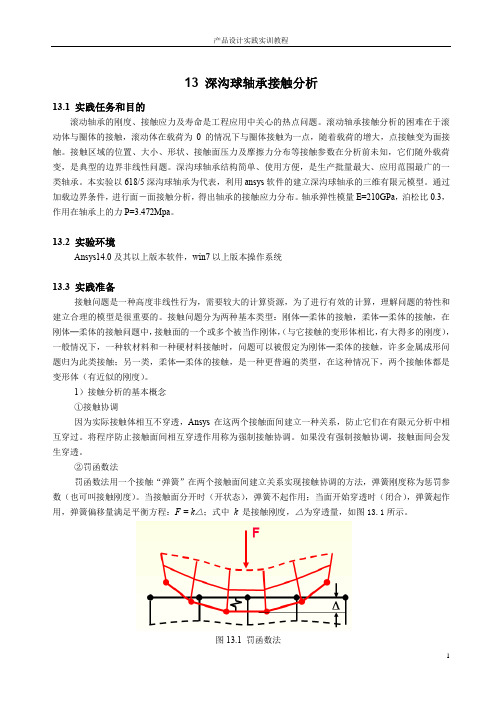
②罚函数法罚函数法用一个接触“弹簧”在两个接触面间建立关系实现接触协调的方法,弹簧刚度称为惩罚参数(也可叫接触刚度)。
当接触面分开时(开状态),弹簧不起作用;当面开始穿透时(闭合),弹簧起作用,弹簧偏移量满足平衡方程:F = k△;式中k是接触刚度,△为穿透量,如图13.1所示。

本文介绍了ANSYS APDL命令和轴承接触分析相关实例。
finish/clear/filename,ex5-3 !设定工作名/title,the contact analysis of Bearing !设定工作标题!************************************!进入前处理模块!************************************/prep7*set,roll_r,5.7 !定义变量参数*set,inside_r1,15*set,inside_r2,18.5*set,outside_r1,29.8*set,outside_r2,33.3*set,deep,8*set,axes_r3,15.5*set,fillet_r4,1*set,axes_deep,20*set,fillet_r5,1!定义单元类型和属性et,1,solid45 !定义单元类型solid45MP,EX,1,2.06e5 !定义弹性模量MP,PRXY,1,0.3 !定义泊松比MP,MU,1,0.3 !定义摩擦系数!建立模型sph4,,-inside_r2-roll_r,roll_r+0.9 !生成轴承滚珠cyl4,,,inside_r1,-120,inside_r2,-60,deep !生成+z向的轴承内圈cyl4,,,outside_r1,-120,outside_r2,-60,deep !生成+z向的轴承外圈cyl4,,,inside_r1,-120,inside_r2,-60,-deep !生成-z向的轴承内圈cyl4,,,outside_r1,-120,outside_r2,-60,-deep !生成-z向的轴承外圈wpoff,0,0,-deep !偏移工作平面cyl4,,,0,-120,axes_r3,-60,-axes_deep !生成装配轴lfillt,57,59,fillet_r4,, !生成倒角线al,57,62,59,54,61 !由线生成面vrotat,32,,,,,,42,37,60,1, !旋转面生成体vdele,6,,,1 !删除编号为6的体!lfillt,31,39,fillet_r5,, !生成倒角线al,34,39,53,31,37 !由线生成面vdrag,27,,,,,,35 !拖拉面生成体vdele,4,,,1 !删除编号为4的体!vgen,,7,,,,,0.27,,,1 !平移编号为7的体!wpoff,0,0,deep !偏移工作平面csys,1 !激活柱坐标系asel,s,loc,x,inside_r2 !选择x=inside_r2的面asel,a,loc,x,outside_r1 !选择x=ouside_r1的面vsba,1,all !体被面分割vdele,4,,,1 !删除编号为4的体vdele,8,,,1 !删除编号为8的体allsel,all !选择全部图元vsel,u,volu,,7 !不选编号为7的体vglue,all !粘接全部的体!以下通过一些布尔操作以方便网格划分wpoff,0,-inside_r2-roll_r,0 !偏移工作平面vsbw,1 !用工作平面分割体1wpro,,-90, !旋转工作平面vsbw,2 !用工作平面分割体2vsbw,3 !用工作平面分割体3wpro,,,-90 !旋转工作平面vsbw,1 !用工作平面分割体1vsbw,2 !用工作平面分割体2vsbw,5 !用工作平面分割体5vsbw,6 !用工作平面分割体6!voffst,2,-4 !沿面的法向平移面2生成体voffst,9,-4 !沿面的法向平移面9生成体voffst,23,-4 !沿面的法向平移面23生成体voffst,53,-4 !沿面的法向平移面53生成体!voffst,3,4 !沿面的法向平移面3生成体voffst,25,4 !沿面的法向平移面25生成体voffst,38,4 !沿面的法向平移面38生成体voffst,58,4 !沿面的法向平移面58生成体!vovlap,all !对体进行搭接操作vdele,25,,,1 !删除编号为25的体及其所属的低阶图元vdele,32,,,1 !删除编号为32的体及其所属的低阶图元vdele,33,,,1 !删除编号为33的体及其所属的低阶图元vdele,34,,,1 !删除编号为34的体及其所属的低阶图元!vdele,31,,,1 !删除编号为31的体及其所属的低阶图元vdele,35,,,1 !删除编号为35的体及其所属的低阶图元vdele,36,,,1 !删除编号为36的体及其所属的低阶图元vdele,37,,,1 !删除编号为37的体及其所属的低阶图元vglue,all !对体进行粘接操作!划分网格esize,2 !设定网格单元尺寸mshape,0,3d !设定网格形状为六面体单元mshkey,1 !设定为映射网格划分方式vsel,s,volu,,1,3,2 !选择编号为1、3 的体vsel,a,volu,,4,5 !同时选择编号为4,5的体vsel,a,volu,,9 !同时选择编号为9的体vsel,a,volu,,12,14 !同时选择编号为12、13、14的体cm,sphere,volu !生成体的组件spherevmesh,all !对体进行网格划分!esize,1 !设定网格单元尺寸!vsel,inve,volu !对当前体选择集进行反选vsel,s,volu,,6vsel,a,volu,,22,23vsel,a,volu,,26,30vsel,a,volu,,38,40vsweep,all !对体sweep网格划分esize,1.5 !设定网格单元尺寸allsel,allvsweep,8,50,49 !设定源面和目标面并进行sweep网格划分vsweep,7,32,37 !设定源面和目标面并进行sweep网格划分!!生成耦合设置cmsel,s,sphere,volu !选择名称为sphere的组件vgen,2,all,,,,,,,0 !复制该组件cmsel,s,sphere,volu !选择名称为sphere的组件vclear,all !清除该组件包含图元的网格vdele,all,,,1 !删除该组件包含的图元!csys,1 !激活柱坐标系asel,s,loc,x,inside_r2 !选择x=inside_r2的面asel,a,loc,x,outside_r1 !同时选中x=outside_r1的面asel,u,loc,y,-90 !从当前选择集中不选y=-90的面nsla,s,1 !选择面所属的节点nrotat,all !旋转节点坐标系与当前激活坐标系平齐cpintf,ux !在重合节点生成自由度ux的耦合设置cpintf,uy !在重合节点生成自由度uy的耦合设置cpintf,uz !在重合节点生成自由度uz的耦合设置!!设定接触参数/PREP7ALLSEL,ALL !选择全部图元/COM, CONTACT PAIR CREATION - START !接触对设置开始/GSA V,cwz,gsav,,temp !将当前的图形设置保存在cwz.gsav文件中!MP,MU,1,0.3 !定义摩擦系数MAT,1 !激活材料属性1R,3 !定义实常数3REAL,3 !激活实常数3ET,2,170 !定义单元类型2ET,3,174 !定义单元类型3KEYOPT,3,9,0 !设定单元类型3的关键项9KEYOPT,3,10,1 !设定单元类型3的关键向10R,3,,,0.1, !设定法向接触刚度为0.1!生成目标面ASEL,S,,,30 !选择编号为30的面ASEL,A,,,90 !同时选中编号为90的面ASEL,A,,,98 !同时选中编号为98的面ASEL,A,,,104 !同时选中编号为104的面ASEL,A,,,113 !同时选中编号为113的面ASEL,A,,,138 !同时选中编号为138的面ASEL,A,,,143 !同时选中编号为143的面CM,AREA_TARGET,AREA !生成目标面组件target TYPE,2 !激活单元类型2NSLA,S,1 !选择面所属的节点ESLN,S,0 !选择节点依附的单元ESURF !在当前选择的单元上覆盖生成单元ESEL,ALL !选择所有的单元!生成接触面ASEL,S,,,35 !选择编号为35的面ASEL,A,,,36 !同时选中编号为36的面CM,AREA_CONTACT,AREA !生成接触面组件contact TYPE,3 !激活单元类型3NSLA,S,1 !选择面所属的节点ESLN,S,0 !选择节点依附的单元ESURF !在当前选择的单元上覆盖生成单元ALLSEL !选择全部图元ESEL,ALL !选择全部单元ESEL,S,TYPE,,2 !选择单元类型为2的单元ESEL,A,TYPE,,3 !同时选中单元类型为3的单元ESEL,R,REAL,,3 !在当前选择集中选出实常数为3的单元/PSYMB,ESYS,1 !打开单元坐标系显示/PNUM,TYPE,1 !打开单元类型编号/NUM,1 !打开颜色显示EPLOT !图形显示单元ALLSEL,ALL !选择全部图元/GRES,cwz,gsav !从cwz.gsav文件中恢复图形设置/COM, CONTACT PAIR CREATION - END !接触对结束!**********************************!进入求解模块!**********************************/solu !进入求解模块csys,1 !激活柱坐标系nsel,s,loc,x,outside_r2 !选择x=outside_r2的节点d,all,all !在节点上施加全部自由度约束asel,s,loc,y,-60 !选择y=-60的面asel,a,loc,y,-120 !同时选中y=-120的面da,all,symm !施加对称边界条件!施加装配轴的移动位移da,33,uz,2*deep !在编号为33的面上施加位移约束!非线性求解设置lnsrch,on !打开线性搜索pred,on !打开预测矫正autot,on !打开自动时间步nsubst,40,100,10 !设定子步数outres,all,all !输出所有子步上的全部数据allsel,all !选择所有图元solve !开始求解!**********************************!进入后处理模块!**********************************/POST1 !进入通用后处理器PLDISP,2 !图形显示结构变形图/DSCALE,1,1.0 !设定显示比例为1.0/EXPAND,6,POLAR,FULL,0,60,0,, !将结果扩展到360度/REPLOT !重绘当前图形PLNSOL,S,Z !图形显示z方向的应力PLNSOL,S,EQV !图形显示平均等效应力PLNSOL, CONT,PRES, 0,1.0 !接触应力等值线图PLNSOL, CONT,STA T, 0,1.0 !接触状态等值线图PLDI,2,ANMODE,10,0.5, ,0 !变形前后动画效果FINISH !后处理模块结束/EXIT,ALL !退出并保存全部数据。

接触力学实训基于ANSYS深沟球轴承有限元分析设计深沟球轴承实物图如图所示,以6300为例进行分析:材料选择GCr15制造,该型号的几何参数为:外径D 为?60,内径d为?10,宽度B为11,钢球直径Dw为?6.4,接触角a为零,钢球的数量z 为7个,材料参数弹性模量E=30700MPa,泊松比u=0.3。
接触面的应力为3472N.观察深沟球轴承接触面的应力。
1.建立模型(1)定义文件名:utility Menu==File==zhoucheng,弹出如图1-3所示的choucheng 对话框,在Enter new jobname 文本框中输入Bearing ,并将New log and error files 复选框选为yes ,点击OK按键。
图1-1 ANSYS开始界面图1-2 命名命令图1-3 命名对话框(2):定义单元类型:Main Menu==Preprocessor==Element Type==Add/Edit/Delete,弹出Element Types 对话框,如图1-4展现的,点击Add 按钮,出现1-5所示的Library of Element Types 对话框,点击选择Structural Solid 和Brick 8node 185 ,点击OK按键,然后点击Element Types 对话框出现的close按键,退出。
图1-4 Element Types 对话框图1-5 Library of Element Types 对话框(3):定义材料性质:Main Menu==Preprocessoe==Material Props==Material Models,出现如图1-7所示的Define Material Model Behavior 对话框,在Material Models Available 出现的选项中依次点击Structural==Linear==Elastic==Isotropic ,出现如图1-8所示Linear Isotropic Propertities for Material 对话框,在EX 框中输入3E006,在PRXY框中输入0.3,点击OK 按键。

基于ANSYS的球轴承接触应力分析及准确性评价方法
李满昌
【期刊名称】《哈尔滨轴承》
【年(卷),期】2024(45)1
【摘要】球轴承接触应力是表征球轴承承载能力的重要参数,也决定了球轴承次表面疲劳剥落状态,对疲劳寿命分析具有重要意义。
本文使用ANSYS对球轴承的最大接触应力及应力分布状态进行分析,并通过实例进行验证,总结完善了其评价准则,可对工程应用拓展提供可靠方法及数据。
【总页数】3页(P29-31)
【作者】李满昌
【作者单位】哈尔滨轴承集团有限公司
【正文语种】中文
【中图分类】TH133.33
【相关文献】
1.基于ANSYS的大型负游隙四点接触球轴承的接触应力分析
2.基于ANSYS的深沟球轴承接触应力有限元分析
3.基于ANSYS Workbench的深沟球轴承接触应力有限元分析
4.基于摩擦生热和接触应力的角接触球轴承结构参数分析
5.基于ABAQUS的深沟球轴承接触应力有限元分析
因版权原因,仅展示原文概要,查看原文内容请购买。
轴承座实体建模及静力学分析姓名:张健,学号:200901042033,班级:机设09-3班一:主要参数:图2中镗孔上的推力Pa和座孔向下的作用力Ps为Pa=1000+33=1033pa,Ps=5000+033=5033pa图1 轴承座实体结构图2 轴承座受载及约束情况二:关键操作步骤:1.实体建模:(1)建立长方体Main Menu>Preprocessor>Create>Block>By Dimensions输入x1=0,x2=3,y1=0,y2=1,z1=0,z2=3(2)平移旋转工作平面Utility Menu>WorkPlane>Offset WP by IncrementsX,Y,Z Offsets 输入2.25,1.25,.75 >ApplyXY,YZ,ZX Angles输入0,-90 >OK。
(3)创建圆柱体Main Menu>Preprocessor>Create>Cylinder> Solid Cylinder在Radius里输入0.375, Depth输入-1.5>OK。
然后生成另一个圆柱体Main Menu>Preprocessor>Copy>Volume拾取圆柱体>Apply, DZ输入1.5>OK (4)从长方体减去这两个圆柱体Main Menu >Preprocessor>Operate>Subtract Volumes先拾取被减的长方体,单击Apply,然后拾取减去的两个圆柱体>OK,再将工作平面与笛卡尔坐标系保持一致,Utility Menu>WorkPlane>Align WP with> Global Cartesian(5)创建支撑部分Main Menu>Preprocessor >Modeling>Create>Volumes-Block> By 2 corners & Z>输入数值:WP X = 0,WP Y = 1,Width = 1.5,Height = 1.75,Depth = 0.75>OK (6)再偏移工作平面Utility Menu> WorkPlane > Offset WP to > Keypoints + >拾取实体块的左上角作为关键点>OK(7)创建支架的上部Main Menu> Preprocessor > Modeling-Create > Volumes>Cylinder > Partial Cylinder+>输入参数:WP X = 0,WP Y = 0,Rad-1 = 0,Theta-1 = 0,Rad-2 = 1.5,Theta-2 = 90,Depth = -0.75>OK(8)在轴口位置建立圆柱体Main Menu:Preprocessor >Modeling>Create>Volume>Cylinder>Solid Cylinder +>输入参数:WP X = 0,WP Y = 0,Radius = 1,Depth = -0.1875>Apply再输入参数:WP X = 0,WP Y = 0,Radius = 0.85,Depth = -2>OK(9)去掉圆柱体形成轴孔.Main Menu: Preprocessor -> Modeling-Operate ->Subtract -> Volumes +>拾取构成支架的两个体>Apply>拾取大圆柱>Apply>拾取(8)中的两个体>Apply>拾取小圆柱体>OK>合并重合的关键点>Main Menu > Preprocessor > Numbering Ctrls > Merge Items >将Label 设置为Keypoints>OK(10)在底座的上部边缘线的中点建立关键点:Main Menu>Preprocessor > Modeling>Create > Keypoints > KP between KPs +>拾取两个关键点>OK>RATI = 0.5>OKMain Menu > Preprocessor > Modeling>Create >Areas>Arbitrary>Through KPs +>拾取孔座和基座的交点,拾取轴承孔上下两个体的交点,拾取基座中间的关键点>OK完成了三角形侧面,沿面的法向拖拉三角面形成一个三棱柱。
ANSYS-球轴承-接触力学
伍黎 2016年12月5日1213
一、前言
本案例使用ANSYS建立轴与轴承的过盈装配模型,对轴与轴承的过盈装配接触问题进行有限元分析,得出内圈与轴过盈配合时应力的分布情况和内圈与滚子之间接触应力的分布情况,以校验轴承设计参数是否合理,并得到合适的装配力。
滚动轴承是一种通用性很强、标准化的机械基础零件,它是影响旋转机械动力学特性的重要因素。
由于滚动轴承使用维护方便,工作可靠,起动性能好,在中等速度下承载能力较高,广泛应用于各种场合。
滚动轴承通常由内圈、外圈、滚动体组成。
内圈紧套在轴颈上并与轴一起旋转,外圈装在轴承座孔中。
在内圈的外周和外圈的内周上均制有滚道。
当内外圈相对转动时,滚动体即在内外圈的滚道上滚动,它们由保持架隔开,避免相互摩擦。
滚动轴承是靠滚动体的转动来支撑转动轴的,因而接触部位是一个点,滚动体越多,接触点就越多;滚动轴承是各类机械传动系统中最重要的部件之一,也是较易损坏的部件。
实践表明,大量机械设备中传动系统的失效在很大比例上是由于滚动轴承受力变化引起的;在滚动轴承的设计与应用分析中,经常会遇到轴承的承载能力、预期寿命、变形与刚度等问题,这些问题都与轴承的受力和应力分布状态密切相关。
研究表明,轴承的寿命约与应力的7~9次方成反比,,因此对滚动轴承的内外圈和滚动体进行应力分析具有十分重要的意义。
本文采用ANSYS有限元分析软件建立滚动轴承的有限元模型并加载求解,进行应力场分析,得出应力场分布。
滚动轴承是标准机械零件,同一系列的轴承结构形式完全一样,其主要参数固定,只是内部设计参数不同,因此采用参数化设计即可实现同一系列轴承的建模。
基于轴承力学分析的理论和原则,简单介绍了模型与单体接触的hertz理论,并以滚动轴承为例,详细分析了轴承的接触应力、变形、载荷分布情况。
一步步建立了有限元模型,采用接触问题的拉格朗日乘子法,得到了比较直观的接触变形以及应力分析图。
二、几何模型的建立
建立如图所示的模型。
滚动轴承由轴承内圈、外圈和滚珠组成,以样本轴承为例进行应力分布分析,内径为15mm,,内圈滚道直径18.5mm,外经为33.3mm,外圈滚道直径29.8mm,滚珠直径6.6mm,轴承宽度16mm与轴过盈装配,轴直径15,5mm,长度36mm。
根据接触力学理论并考虑轴承的结构受载特点可知,轴承为轴对称模型,因此建模时只取该滚子的1/6有
限元模型即可.,取计算单元solid brick 8node185,弹性模量为20.6e5,泊松比为0.3,摩擦系数为0.3。
图1 有限元几何模型的建立
三、网格划分
对于轴承分析问题,采用Structural Solid 中的Brick 8node 185 单元划分网格。
钢珠网格划分采用映射划分原则,其余部分采用扫描划分,划分为网格的模型如下图。
图2 划分网格后的模型
由于生成的网格中,轴承滚珠和内外圈之间的网格是连续的,也就是说两个部件之间是刚性地连接在一起的,与实际不符,所以需用耦合来定义相互之间的关系。
耦合后的网格模型如下:
图3 创建耦合后的模型
四、模型接触设置和边界条件
由于轴承内圈和轴面接触,以平面为接触面,选取相应的接触单元,利用接触向导建立surface-to-surface接触。
接触模型如图4所示:
图4 对模型创建接触
五、施加约束
根据滚动轴承的结构和在总体坐标下对模型边界约束。
轴承外圈外表面完全固定,对切割部分的几个面上施加对称位移约束,由于轴承和轴接触,所以在柱坐标下施加轴Y方向的位移约束。
图5 对模型加入Y向约束
六、计算结果及分析
对所建立的模型进行非线性分析,计算结果收敛。
求解得到轴承过盈装配时应力分布图,图3-6为过盈装配过程中结构变形图、图3-7为柱坐标系下Y方向应力等值线图、图3-8为为直角坐标系的VonMises应力分布图,图3-9为接触应力等值线图。
(1)轴承结构情况图
图6 结构变形图
(2)应力情况分析
图7 Y方向应力等值线图
图8 等效应力分布图
图9 接触应力等值线图七、结果分析
由图可以看出轴承内圈与轴过盈配合时,VonMises应力等值面是一系列以轴承轴线为中心线的圆周面,轴承内外圈与滚珠接触处应力较大,其余应力沿半径向外方向依次减小,内圈内表面应力最大,外表面应力最小。
作为各种机械运动的支承,轴承的工作环境可能是超高温、超低温、强腐蚀(酸、碱和高温苛性纳等)以及超高真空,也可能是强冲击、强磨料磨损、无磁和超高速等等。
苛刻环境要求可能是单项,也可能是多种复合恶劣条件的综合,不论是普通轴承还是特种专用轴承,主机对其寿命、性能和可靠性都提出很高的要求。
轴承装配过程中所产生的预应力及所受应力的分布情况对轴承的寿命和可靠性有很大影响。