埃斯顿PRONET伺服系统调试方法
- 格式:ppt
- 大小:1.66 MB
- 文档页数:48
伺服驱动器参数设置方法
1. 前期准备
根据伺服驱动器使用说明书来确认系统参数的设置范围,同时要了解所需参数的具体名称和作用。
在设置参数前,先停止伺服系统的运转。
2. 主伺服参数设置
主伺服参数指防护、速度、加速度等参数。
设置前,先按照使用说明书的要求选择相应的参数。
然后进行参数设置。
3. PID参数设置
PID参数设置包括比例系数、积分时间和微分时间三个参数。
一般情况下,这三个参数是配套使用的。
一般情况下,这三个参数都是需要根据实际情况进行调整的。
在设定前,先根据使用说明书选择相应的参数,然后调整PID参数,直到达到理想的运动效果。
4. 位置误差调整
基础参数调整完成后,要进行位置误差调整。
这时,可以手动转动伺服电机,观察位置误差变化。
这个过程中,要根据速度的变化,对位置误差进行调整,直到
达到预期效果。
5. 整机参数调整
完成单个电机的参数设定后,还需要对整个伺服系统进行参数调整。
整机参数包括系统响应速度、整机加速度等。
通过调整整机参数,可以使整个伺服系统的运动更加顺畅。
6. 参数测试
参数设置完成后,还需要对其进行测试,以验证是否满足了伺服系统的设计要求。
在测试过程中,可以根据需要逐步调整参数,以达到最佳效果。
伺服电机的调试方法:1、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。
比如,山洋是设置1V电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。
2、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和控制卡(以及PC)上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V以下。
如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。
由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。
5、建立闭环控制再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。
调试伺服电机的六大步骤及注意事项伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
今天与大家分享的就是伺服电机的调试方法和注意事项。
伺服电机的调试方法伺服电机的注意事项1、伺服电机油和水的保护A:伺服电机可以用在会受水或油滴侵袭的场所,但是它不是全防水或防油的。
因此,伺服电机不应当放置或使用在水中或油侵的环境中。
B:如果伺服电机连接到一个减速齿轮,使用伺服电机时应当加油封,以防止减速齿轮的油进入伺服电机。
C:伺服电机的电缆不要浸没在油或水中。
2、伺服电机电缆→减轻应力A:确保电缆不因外部弯曲力或自身重量而受到力矩或垂直负荷,尤其是在电缆出口处或连接处。
B:在伺服电机移动的情况下,应把电缆(就是随电机配置的那根)牢固地固定到一个静止的部分(相对电机),并且应当用一个装在电缆支座里的附加电缆来延长它,这样弯曲应力可以减到最小。
C:电缆的弯头半径做到尽可能大。
3、伺服电机允许的轴端负载A:确保在安装和运转时加到伺服电机轴上的径向和轴向负载控制在每种型号的规定值以内。
B:在安装一个刚性联轴器时要格外小心,特别是过度的弯曲负载可能导致轴端和轴承的损坏或磨损。
C:最好用柔性联轴器,以便使径向负载低于允许值,此物是专为高机械强度的伺服电机设计的。
D:关于允许轴负载,请参阅“允许的轴负荷表”(使用说明书)。
4、伺服电机安装注意A:在安装/拆卸耦合部件到伺服电机轴端时,不要用锤子直接敲打轴端。
(锤子直接敲打轴端,伺服电机轴另一端的编码器要被敲坏)B:竭力使轴端对齐到最佳状态(对不好可能导致振动或轴承损坏)。
伺服电机的调试步骤伺服电机的调试步骤1、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID 参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V 的控制电压。
比如,松下是设置1V 电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。
2、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和控制卡(以及PC )上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V 以下。
如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。
由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。
5、建立闭环控制再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。


伺服电机的调试步骤伺服电机的调试步骤1、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID 参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V 的控制电压。
比如,松下是设置1V 电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。
2、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和控制卡(以及PC )上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V 以下。
如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。
由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。
5、建立闭环控制再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。


埃斯顿机器人调试作业指导书1、 目的为了保证成品机器人的质量,特制定本标准。
2、适用范围该规范适用于所有产品机器人调试流程。
3、引用标准GB/T 5226.1-2002 机械安全机械电气设各第1部分:通用技术条件4、调试步骤4.1首先核对电柜序列号、型号与与机器人本体是否相符。
4.2确认机器人控制柜检验合格。
参考《埃斯顿机器人成品电柜检验流程》。
(注:电柜通过《埃斯顿机器人成品电柜检验流程》方可出库入库)4.3核对电柜校线报告清单,确认校线通过方可上电。
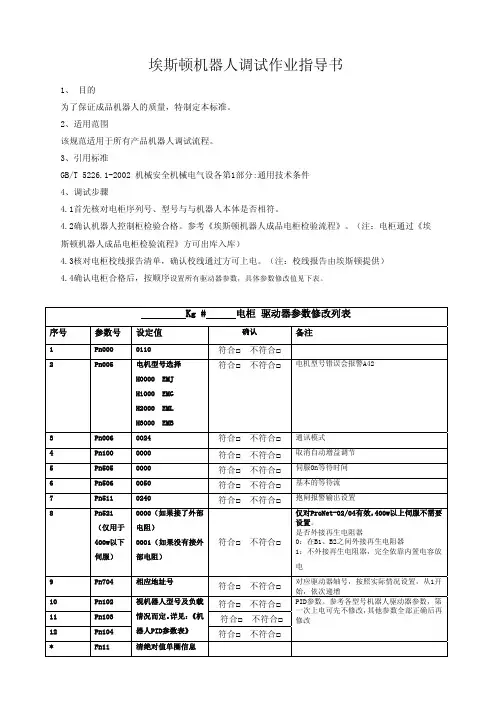
(注:校线报告由埃斯顿提供)4.4确认电柜合格后,按顺序设置所有驱动器参数,具体参数修改值见下表。
Kg # 电柜 驱动器参数修改列表序号 参数号 设定值 确认 备注1 Pn000 0110 符合□ 不符合□2 Pn005 电机型号选择H0000 EMJH1000 EMGH2000 EMLH3000 EMB符合□ 不符合□电机型号错误会报警A423 Pn006 0024 符合□ 不符合□ 通讯模式4 Pn100 0000 符合□ 不符合□取消自动增益调节5 Pn505 0000 符合□ 不符合□伺服On等待时间6 Pn506 0050 符合□ 不符合□基本的等待流7 Pn511 0240 符合□ 不符合□抱闸报警输出设置8 Pn521(仅用于400w以下伺服) 0000(如果接了外部电阻)0001 (如果没有接外部电阻)符合□ 不符合□仅对ProNet-02/04有效,400w以上伺服不需要设置。
是否外接再生电阻器0:在B1、B2之间外接再生电阻器1:不外接再生电阻器,完全依靠内置电容放电9 Pn704 相应地址号符合□ 不符合□对应驱动器轴号,按照实际情况设置,从1开始,依次递增10 Pn102 视机器人型号及负载情况而定。
详见:《机器人PID参数表》 符合□ 不符合□PID参数。
参考各型号机器人驱动器参数,第一次上电可先不修改,其他参数全部正确后再修改11 Pn103 符合□ 不符合□12 Pn104 符合□ 不符合□* Fn11 清绝对值单圈信息* Fn10 清绝对值多圈信息校对人: 时间:4.5.CF卡的安装和拆卸。
埃斯顿PRONET用户手册:让你轻松用好PRONETPRONET,是一款功能强大的网络设备管理系统。
而埃斯顿PRONET,是PRONET的完美升级版——它极大地增强了PRONET的操作效率和管理能力,让网络设备的管理变得更加简单和高效。
那么,如何才能快速上手使用埃斯顿PRONET呢?这里提供一份简单直观的,让你轻松掌握PRONET的操作技巧及其强大的管理功能。
第一步:埃斯顿PRONET系统登录在你使用埃斯顿PRONET之前,首先要进行账号登录。
打开埃斯顿PRONET界面,在登录页面中输入用户名和密码,然后单击“登陆”按钮。
这样,就成功登录了系统并进入了PRONET的实时监控管理界面。
第二步:设备列表在埃斯顿PRONET系统中,你可以通过设备列表来查看你管理的所有设备。
通过筛选设备的IP地址、MAC地址、设备名称等条件,方便快捷地选择所需设备,进行统一的管理监控操作。
第三步:设备监控界面埃斯顿PRONET提供了一系列实时监控管理工具,查看设备的CPU使用率、内存使用率、网络带宽使用量等等,就如同你能够洞察每一个被管理的设备的运行状况和网络连接状态一样。
第四步:自定义报警随着网络应用的日益广泛和网络重要性的增加,若不能及时发现故障和异常,就会给网络带来不可挽回的损失。
所以,在埃斯顿PRONET中,自定义报警是一个非常有用的功能。
通过配置报警级别、报警方式、监控对象等条件,可以自动监控设备状态并在设备出现异常时第一时间发出通知。
第五步:实时流量监控为了跟进网络设备的实时运行状态,埃斯顿PRONET可以全面监测实时流量,并将监控结果以实时数据图表的形式显示。
用户可以通过实时流量监测图表来了解网络设备的网络流量使用情况,从而进行设备的合理调整,以达到最佳效果。
第六步:安全策略设置获取设备内容外,埃斯顿PRONET还适用于网络安全的监控和管理。
在安全策略设置中,可以对网络系统的安全性方面进行全方位地保障。
通过设置管理、审计、过滤、检测等多重策略,可大幅度提高用户的网络安全等级。
伺服驱动器参数设置步骤1.硬件安装:首先,需要将伺服驱动器与伺服电机连接起来。
通常,伺服驱动器和伺服电机之间有多个插座,包括电源插座、信号输入输出插座等。
按照设备说明书,正确连接各个插座。
2.伺服驱动器上电:将伺服驱动器连接到电源,并打开电源开关。
此时,驱动器的电源指示灯应亮起。
3.参数初始化:按照伺服驱动器的说明书,找到参数初始化操作方法。
通常是在控制面板上找到“参数初始化”按钮,按下该按钮进行初始化操作。
4.控制模式设置:伺服驱动器有多种控制模式,如位置控制模式、速度控制模式以及扭矩控制模式等。
根据实际需求,选择合适的控制模式,并进行相应的参数设置。
5.电机参数设置:电机参数设置是伺服驱动器参数设置的关键步骤之一、各个参数的设置值会直接影响到电机运行的性能和运动的准确性。
常见的电机参数有电流限制、速度限制、加速度限制等。
根据实际需求和电机的参数,进行相应的设置。
6.反馈器件参数设置:伺服驱动器通常会连接反馈器件,如编码器、旋转变压器等。
这些反馈器件可以提供电机运行的准确位置和速度信息,从而实现更加精准的控制。
根据实际连接的反馈器件类型,进行相应的参数设置。
7.控制指令设置:伺服驱动器控制指令是通过外部设备或上位机发送的。
根据实际的控制需求,设置相应的控制指令,如启动指令、停止指令、加速指令等。
8.运动参数设置:伺服驱动器控制伺服电机的运动。
运动参数设置包括速度设定、加速度设定、位置设定等。
根据实际控制需求,设置相应的运动参数。
9.参数保存:设置完所有参数后,需要将参数保存到驱动器的存储器中,以便下次使用时可以直接加载已保存的参数。
通常,在参数设置完成后,按下“保存参数”按钮即可保存参数。
10.参数调试:参数设置完成后,需要进行参数调试来验证参数的正确性和合理性。
可以通过发送不同的控制指令,观察伺服电机的运动情况,并根据实际需要进行参数微调。
11.参数优化:根据实际应用需求和控制要求,进一步优化参数设置。
伺服电机的调试步骤1、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。
比如,松下是设置1V电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。
2、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和控制卡(以及PC)上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V以下。
如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。
由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。
5、建立闭环控制再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。
伺服电机的6大调试步骤伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机可应用在是火花机、机械手、精确的机器等方面,通常只要是要有动力源的,而且对精度有要求的一般都可能涉及到伺服电机。
在使用伺服电机之前都要对其进行调试,下面电工学习网小编带领大家学习了解伺服电机的6大调试步骤。
1、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V 的控制电压。
2、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,伺服电机和控制卡(以及PC)上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置。
3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V 以下。
如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。