proe必掌握装配知识分析
- 格式:ppt
- 大小:1.52 MB
- 文档页数:63
proe 装配技术应用教程by 无维网IceFai (黄光辉)听到自动这个词语,总会有人产生不切实际的想法,以为啥也不用干,把零件放到装配proe 就会自动找到合适的位置并装上。
如果不幸的你真的是有这个想法,那么友情建议不要往下看,因为你会失望的。
但如果你经常接触到需要装配或需要一次性装配很多零件的话,往下看或许有收获。
所谓的自动装配,在这里的意思是相对的,也就是在装配的过程中可以尽可能少的人工参于。
在WildFire 中,这种辅助性质的装配方式有几种,包括重复装配技术,元件界面,拖放式放置以及群装配技术,如果灵活应用对于日常的设计工作还是很有好处的。
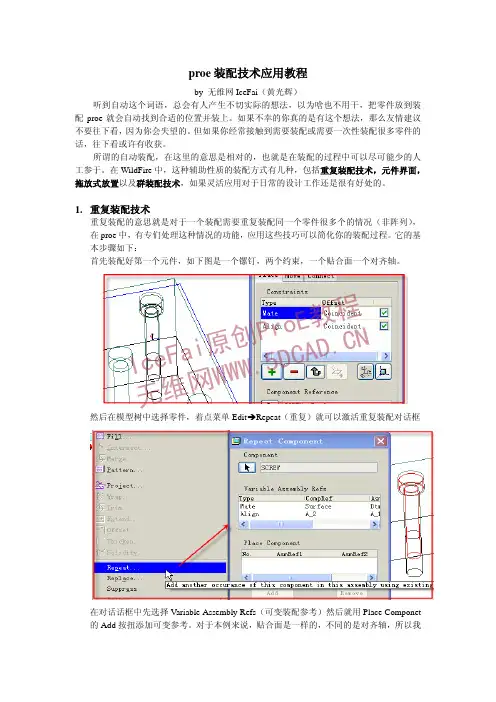
1. 重复装配技术重复装配的意思就是对于一个装配需要重复装配同一个零件很多个的情况(非阵列),在proe 中,有专们处理这种情况的功能,应用这些技巧可以简化你的装配过程。
它的基本步骤如下:首先装配好第一个元件,如下图是一个镙钉,两个约束,一个贴合面一个对齐轴。
然后在模型树中选择零件,着点菜单Edit ÎRepeat (重复)就可以激活重复装配对话框在对话话框中先选择Variable Assembly Refs (可变装配参考)然后就用Place Componet 的Add 按扭添加可变参考。
对于本例来说,贴合面是一样的,不同的是对齐轴,所以我I c e F a i 原创P r o E 教程 无维网W W W .5D C A D .C N们只选对齐轴作为variable assembly refs 。
这样我们只需连续选择所有要装配的对齐轴作为place component 的参考就行。
当所有轴选择完后就可以点confim 确定装配。
这样就可以实现一次装配多个零件。
可变装配参考也可以选择多个,不过这时候place component 中的参考的选择也要按组来选,也就是说假如上例中你把贴合面也作为可变的话,你选择的时候就要新的帖合面和对齐轴要连着选,选择完一组然后接着选下一组。

(9)第四章Pro/E零件装配利用Pro/E进行产品设计时,若完成了各个零件的设计,则可创建一个新的组件,在组件的模块中进行零件的装配。
本章首先说明零件装配的基本操作步骤,然后以鼓风机来说明如何指定零件与零件之间的相互配合关系,以将数个零件装配为一个次组件或组件,并产生组件爆炸图。
除了将零件装配为组件外,另一个重要的Pro/E功能是在组件中设计“相互配合的零件”,本章以螺栓/螺帽来说明配合件设计的基本观念及操作步骤。
第一节零件装配简介工具(Tool)/选项(Options)将参数:template designasm 设为:mmns_asm_design.asm一、零件装配的基本操作步骤(见书P156)Ctrl+Alt+鼠标中键:旋转欲装配的零件Ctrl+Alt+鼠标右键:移动欲装配的零创建新的装配体模型的一般过程1、命名一个新的装配体的三维模型2、装配过程(匹配、对齐……)(9-1:asm-p1.prt,asm-p2.prt)着色,爆炸视图(视图/分解/分解视图。
调整位置:启动视图管理器:分解/缺省分解/属性,点编辑位置/选轴线/移动,返回,保存。
)二、常用的装配约束条件通过装配约束,可以指定一个元件相对于装配体中的另一元件(或特征)的放置方式和位置。
建议将附加约束限制在10个以内,系统最多允许指定50个约束。
1、贴配(Mate):两个平面贴合例:匹配(Mate):9-2:mate-p1.prt及mate-p2.prt2、对齐(Align):两个平面或两条轴线对齐。
注意:·使用“匹配”和“对齐”时,两个参照必须为同一类型(例如平面对平面、旋转曲面对旋转曲面、点对点、轴线对轴线)。
旋转曲面指的是通过旋转一个截面,或者拉伸一个圆弧/圆而形成的一个曲面。
只能在放置约束中使用下列曲面:平面、圆柱面、圆锥面、环面、球面。
·使用“匹配”和“对齐”并输入偏距后,系统将显示偏距方向。
对于反向偏距,要用负偏距值。
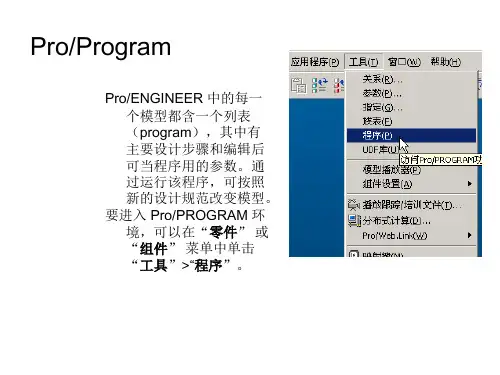
第12章模型装配•完成零件设计后,将设计的零件按设计要求的约束条件或连接方式装配在一起才能形成一个完整的产品或机构装置。
利用Pro/E提供的“组件”模块可实现模型的组装。
在Pro/E系统中,模型装配的过程就是按照一定的约束条件或连接方式,将各零件组装成一个整体并能满足设计功能的过程。
•本章主要讲解如下内容:• 各种装配约束类型• 装配连接类型的概念• 零件装配与连接的基本方法• 组件分解图的建立方法图12-1 〖新建〗对话框• 组件的装配间隙与干涉分析12.1 元件放置操控板•模型的装配操作是通过元件放置操控板来实现的。
单击菜单【文件】→【新建】命令,在打开的〖新建〗对话框中选择“组件”,如图12-1所示。
单击【确定】按钮,进入“组件”模块工作环境。
在组件模块工作环境中,单击按钮或单击菜单【插入】→【元件】→【装配】命令,在弹出的〖打开〗对话框中选择要装配的零件后,单击【打开】按钮,系统显示如图12-2所示的元件放置操控板。
•图12-2中的图(a)为【放置】按钮对应的面板,图(b)为【移动】按钮对应的面板。
下面对面板中各项功能及意义说明如下:图(a)(b)图12-2 元件放置操控板• 移动:使用〖移动〗面板可移动正在装配的元件,使元件的取放更加方便。
当〖移动〗面板处于活动状态时,将暂停所有其他元件的放置操作。
要移动参与组装的元件,必须封装或用预定义约束集配置该元件。
在〖移动〗面板中,可使用下列选项:• 运动类型:选择运动类型。
默认值是“平移”。
•✹定向模式:重定向视图。
•✹平移:在平面范围内移动元件。
•✹旋转:旋转元件。
•✹调整:调整元件的位置。
• 在视图平面中相对:相对于视图平面移动元件,这是系统默认的移动方式。
• 运动参照:选择移动元件的移动参照。
• 平移/旋转/调整参照:选择相应的运动类型出现对应的选项。
• 相对:显示元件相对于移动操作前位置的当前位置。
• 挠性:此面板仅对于具有预定义挠性的元件是可用的。
1.1“匹配”约束用来定位两个相同类型的参照(平面、曲面或基准平面),使彼此相对,该约束包括“重合”、“定向”和“偏距”三种偏移类型。
定向:使两个参照位于同一平面上且相互平行。
偏距:两个参照以面对面方式相对,并保持一定的距离,在右侧的文本框中可输入偏移值(即两个平面之间的距离)1.2“对齐”约束用于使两个参照(可以是点、平面、曲面、基准平面或轴)朝向相同,从而可以实现共面、平行或重合1.3“插入”约束用于将一个旋转曲面插入另一个旋转曲面中,并使两者的中心轴重合1.4使用“坐标系”约束可将元件的坐标系与组件的坐标系对齐(原点、X轴、Y轴和Z轴完全重合),以此将元件放置到组件中1.5使用“相切”约束可以让两个曲面(或基准平面)在某点处相切1.6使用“线上点”约束可以将一个点(顶点或基准点)对齐到某条线(边线、轴线或基准曲线)上或者线的延长线上1.7使用“曲面上的点”约束可以将一个点(顶点或基准点)对齐到某个曲面(实体表面、曲面特征或基准平面)上1.8使用“曲面上的边”约束可以将一条边对齐到某个曲面(实体表面、曲面特征或基准平面)上1.9“固定”约束用来将元件固定在当前位置,无需选取参照。
此类元件多是被移动或被封装的元件。
2.0“缺省”约束指系统自动将元件的缺省坐标系与组件的缺省坐标系对齐,无需选取坐标系参照。
当装配第一个元件时,通常使用此约束。
2.1“自动”约束指系统根据所选的参照类型自动指定一种约束来放置元件2.1分解视图又称为爆炸图,是将装配好的零件模型重新分解开而得到的视图,该视图可以展示模型的装配关系和内部结构2.2自动分解视图是指系统根据模型所用到的装配约束自动产生的分解视图。
此视图的创建方法非常简单,打开模型装配文件后,选择“视图”>“分解”>“分解视图”菜单,系统将自动生成分解视图2.3选择“视图”>“分解”>“编辑位置”菜单,将打开“分解位置”对话框,利用该对话框可按照指定的运动类型和运动参照移动各元件2.4偏距线用来标示分解视图中各元件之间的相对位置关系,使装配关系更加清晰。

3.5 利用pro/e进行装配设计在PRO/E中,零件装配是通过定义参与装配的各个零件之间的装配约束来实现的,也就是在各个零件之间建立一定的连接关系,并对其相互位置进行约束,从而确定个零件在空间的相当位置关系在PRO/E的装配模块中,可以将生成的零件通过相互关系之间的定位关系装配在一起,并检查零件之间是否有干涉及装配体的运动情况是否合乎设计要求,在组件装配中,主要包括有底向上和有顶向下两种装配设计思想。
有底向上:由单个模型,根据虚拟产品的装配关系进行装配,最终完成虚拟产品的设计。
这种设计方法是一种比较简单、低级的方法,其设计思路比较清楚,设计原理也容易被接受。
但是其设计理念还部够先进,设计方法不够灵活,还部能完全适应现代设计的基本要求。
这种方法主要应用于一些已经比较成熟产品的设计过程,可以获得比较高得设计效率。
由顶向下的装配设计于由底向上的设计方法正好相反。
设计时,首先从整体上勾画出产品得整体结构关系或创建装配体得二维部件布局关系图,然后再根据这些关系或布局逐一设计出产品得零件模型。
在真正得概念设计中,往往都时先设计出整个产品得外在概念和功能概念后,逐步对产品进行设计上得细化直至单个零件。
在实际的装配过程中通常混合使用以上两种设计方法,以发挥各自的优点。
3.5.1 零件装配的一般过程1. 新建装配体的三维状态下模型下拉菜单“文件”命令→ “新建”,在弹出的“新建”对话框中,在“类型”选项下选择“组件”选项,在“子类型”选项下选择“设计”选项,输入文件名以及选取是否“选用缺省模板”选项,单击“确定”按钮后即可进入装配体设计模式中。
如果不选取“使用缺省模板”选项,输入文件名称,单击“确定”后,系统将会弹出一个“新文件”对话框,如图3-248所示。
可选用适当的模板供设计使用,最后单击“确定”按钮。
2. 装配子配零件(1)工具栏“装配”工具图标,打开要装配的第一个零件名,系统会弹出一个对话框,如图3-250所示,在对话框中“放置”选项下,选择合适的选项来约束零件,一般选取“默认”选项,图标为,有时也可以选取“固定”选项,图标为,单击“确定”按钮。
主体(Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。
连接(Connections) - 定义并约束相对运动的主体之间的关系。
自由度(Degrees of Freedom) - 允许的机械系统运动。
连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。
拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。
动态(Dynamics) - 研究机构在受力后的运动。
执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。
齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。
基础(Ground) - 不移动的主体。
其它主体相对于基础运动。
机构(Joints) - 特定的连接类型(例如销钉机构、滑块机构和球机构)。
运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。
环连接(Loop Connection) - 添加到运动环中的最后一个连接。
运动(Motion) - 主体受电动机或负荷作用时的移动方式。
放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。
回放(Playback) - 记录并重放分析运行的结果。
伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。
可在机构或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。
LCS - 与主体相关的局部坐标系。
LCS 是与主体中定义的第一个零件相关的缺省坐标系。
UCS - 用户坐标系。
WCS - 全局坐标系。
组件的全局坐标系,它包括用于组件及该组件内所有主体的全局坐标系。
运动分析的定义在满足伺服电动机轮廓和机构连接、凸轮从动机构、槽从动机构或齿轮副连接的要求的情况下,模拟机构的运动。
运动分析不考虑受力,它模拟除质量和力之外的运动的所有方面。
因此,运动分析不能使用执行电动机,也不必为机构指定质量属性。