第2章 单自由度系统的受迫振动题解
- 格式:doc
- 大小:806.00 KB
- 文档页数:15

结构动力学课后习题答案结构动力学是研究结构在动态载荷作用下的响应和行为的学科。
它涉及到结构的振动、冲击响应、疲劳分析等方面。
课后习题是帮助学生巩固课堂知识、深化理解的重要手段。
以下内容是结构动力学课后习题的一些可能答案,供参考:习题1:单自由度系统自由振动分析解答:对于一个单自由度系统,其自由振动的频率可以通过以下公式计算:\[ f = \frac{1}{2\pi}\sqrt{\frac{k}{m}} \]其中,\( k \) 是系统的刚度,\( m \) 是系统的总质量。
系统自由振动的振幅随着时间的衰减可以通过阻尼比 \( \zeta \) 来描述,其衰减系数 \( \delta \) 可以通过以下公式计算:\[ \delta = \sqrt{1-\zeta^2} \]习题2:单自由度系统受迫振动分析解答:当单自由度系统受到周期性外力作用时,其受迫振动的振幅可以通过以下公式计算:\[ A = \frac{F_0}{\sqrt{(k-m\omega^2)^2+(m\zeta\omega)^2}} \] 其中,\( F_0 \) 是外力的幅值,\( \omega \) 是外力的角频率。
习题3:多自由度系统模态分析解答:对于多自由度系统,可以通过求解特征值问题来得到系统的模态。
特征值问题通常表示为:\[ [K]{\phi} = \lambda[M]{\phi} \]其中,\( [K] \) 是系统的刚度矩阵,\( [M] \) 是系统的质量矩阵,\( \lambda \) 是特征值,\( {\phi} \) 是对应的特征向量,即模态形状。
习题4:结构的冲击响应分析解答:对于结构的冲击响应分析,通常需要考虑冲击载荷的持续时间和冲击能量。
结构的冲击响应可以通过冲击响应谱(IRF)来分析,它描述了结构在不同频率下的响应。
冲击响应分析的结果可以用来评估结构的耐冲击性能。
习题5:疲劳分析解答:结构的疲劳分析需要考虑结构在重复载荷作用下的寿命。

习 题2-1已知系统的弹簧刚度k =800 N/m ,作自由振动时的阻尼振动周期为1.8s ,相邻两振幅的比值12.41=+i i A A ,若质量块受激振力t t F 3cos 360)(=N 的作用,求系统的稳态响应。
解:由题意,可求出系统的运动微分方程为t mxn x p x n 3cos 36022=++ 得到稳态解)3cos(α-=t B x其中m kB B B 45.03604)1(022220==+-=λζλ222122tg λζλωωα-=-=n p n 由d nT i iA A e 2.41===+η489.3π2797.0ln 8.1ln ======dd dd dT p T n T nT ηη 又22n p p n d -=有579.3222=+=n d n p n p p45.51255.1298.0374.0838.01838.0223.02tg 103.1408.045.0838.0223.04)838.01(45.0223.0579.3797.0838.0579.332222===-⨯⨯===⨯⨯+-=======ααζωλB p n p n n所以 x =1.103 cos(3t -51︒27')2-2一个无阻尼弹簧质量系统受简谐激振力作用,当激振频率ω1 =6rad/s 时,系统发生共振;给质量块增加1 kg 的质量后重新试验,测得共振频率ω2 =5.86rad/s ,试求系统原来的质量及弹簧刚度。
解:设原系统的质量为m ,弹簧常数为k 由m kp n =,共振时m kp n ==1ω 所以 mk =6 ①又由 当 86.512=+==m kp n ω ② ①与②联立解出 m =20.69 kg ,k =744.84 N/m2-3总质量为W 的电机装在弹性梁上,使梁产生静挠度st δ,转子重Q ,重心偏离轴线e ,梁重及阻尼可以不计,求转速为ω时电机在垂直方向上稳态强迫振动的振幅。
结构动力学习题解答(一二章)第一章单自由度系统总结求单自由度系统固有频率的方法和步骤。
单自由度系统固有频率求法有:牛顿第二定律法、动量距定理法、拉格朗日方程法和能量守恒定理法。
1、牛顿第二定律法适用范围:所有的单自由度系统的振动。
解题步骤:(1)对系统进行受力分析,得到系统所受的合力;(2)利用牛顿第二定律∑xm ,得到系统的运动微分方=F程;(3)求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
2、动量距定理法适用范围:绕定轴转动的单自由度系统的振动。
解题步骤:(1)对系统进行受力分析和动量距分析;(2)利用动量距定理J∑θ ,得到系统的运动微分方程;=M(3)求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
3、拉格朗日方程法:适用范围:所有的单自由度系统的振动。
解题步骤:(1)设系统的广义坐标为θ,写出系统对于坐标θ的动能T 和势能U 的表达式;进一步写求出拉格朗日函数的表达式:L=T-U ;(2)由格朗日方程θθ??-LL dt )( =0,得到系统的运动微分方程;(3)求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
4、能量守恒定理法适用范围:所有无阻尼的单自由度保守系统的振动。
解题步骤:(1)对系统进行运动分析、选广义坐标、写出在该坐标下系统的动能T 和势能U 的表达式;进一步写出机械能守恒定理的表达式 T+U=Const(2)将能量守恒定理T+U=Const 对时间求导得零,即0)(=+dtU T d ,进一步得到系统的运动微分方程;(3)求解该方程所对应的特征方程的特征根,得到该系统的固有频率。
叙述用衰减法求单自由度系统阻尼比的方法和步骤。
用衰减法求单自由度系统阻尼比的方法有两个:衰减曲线法和共振法。
方法一:衰减曲线法。
求解步骤:(1)利用试验测得单自由度系统的衰减振动曲线,并测得周期和相邻波峰和波谷的幅值i A 、1+i A 。
(2)由对数衰减率定义 )ln(1+=i iA A δ,进一步推导有 212ζπζδ-=,因为ζ较小,所以有πδζ2=。
1 / 21第二章 单自由度系统习题2.1 弹簧下悬挂一物体,弹簧静伸长为δ。
设将物体向下拉,使弹簧有静伸长3δ,然后无初速度地释放,求此后的运动方程。
解:2n=g/δ运动微分方程(式2.5):x +2nx=0初始条件:x (0)=3δ,x(0)=0 由式2.8有:A=2020)(ωnxx +=3δ=arctgnx xω00 =0由式2.7有: 响应:x =3δcos(δg t)2.2 弹簧不受力时长度为65cm ,下端挂上1kg 物体后弹簧长85cm 。
设用手托住物体使弹簧回到原长后无初速度地释放,试求物体的运动方程、振幅、周期及弹簧力的最大值。
解:ω2n =g/δ=9.8/0.2=49运动微分方程(式2.5):x +ω2n x=0 初始条件:x (0)=-0.2,x(0)=0 由式2.8有:振幅:A=2020)(ωnxx +=0.2ϕ=arctgnx xω00 =0由式2.7有: 响应:x=0.2cos(7t) 周期:T=2/ωn弹簧刚度:k=mg/δ=19.8/0.2=49(N/m)最大弹簧力:F Smax =-kA=-490.2=9.8(N)2.3 重物m l 悬挂在刚度为k 的弹簧上并处于静平衡位置,另一重物m 2从高度为h 处自由落到m l 上而无弹跳,如图T —2.3所示,求其后的运动。
图 T —2.3解:ω2n =k/(m 1+m 2)运动微分方程(式2.5):x+2nx=0初始条件:x (0)=- m 2g/km 2gh=21(m 1+m 2)x2(0)⇒ x (0) (以下略)2.4 一质量为m 、转动惯量为I 的圆柱体作自由纯滚动,圆3 / 21心受到一弹簧k 约束,如图T —2.4所示,求系统的固有频率。
图 T —2.4解:系统的势能:U=21kr 2θ2系统的动能:E t =21I •θ2+21mr2•θ2由d(U+E t )=0得:(I+ mr 2)••θ+kr 2θ=0ω2n =22m r I kr +2.5 均质杆长L 、重G ,用两根长h 的铅垂线挂成水平位置,如图T —2.5所示,试求此杆相对铅垂轴OO 微幅振动的周期。
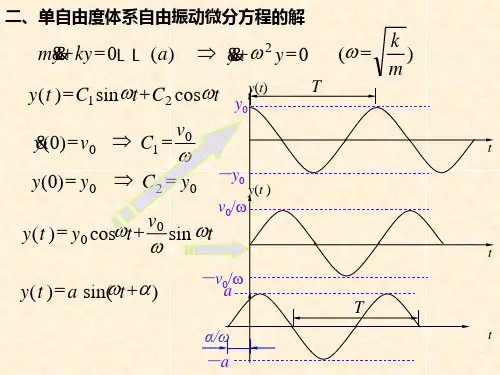
25第2章 单自由度系统的自由振动2.1 无阻尼系统的自由振动设有质量为m 的物块(可视为质点)挂在弹簧的下端,弹簧的自然长度为l 0,弹簧刚度为k ,如不计弹簧的质量,这就构成典型的单自由度系统,称之为弹簧质量系统如图2-1所示。
工程中许多振动问题都可简化成这种力学模型。
例如,梁上固定一台电动机,当电机沿铅直方向振动时,梁和电机组成一个振动系统,如不计梁的质量,则它在该系统中的作用相当于一根无重弹簧,而电机可视为集中质量。
于是这个系统可简化成如图2-1所示的弹簧质量系统。
2.1.1自由振动方程以图2-1所示的弹簧质量系统为研究对象。
取物块的静平衡位置为坐标原点O ,x 轴顺弹簧变形方向铅直向下为正。
当物块在静平衡位置时,由平衡条件∑F x = 0,得到st δk mg = (A )st δ称为弹簧的静变形。
当物块偏离平衡位置为x 距离时,物块的运动微分方程为mxkx &&=− (2-1) 将式(2-1)两边除以m ,并令mkp =n (2-2) 则式(2-1)可写成02n =+x p x && (2-3)这就是弹簧质量系统置之只在线弹性力-kx 的作用下所具有的振动微分方程,称之为无阻尼自由振动的微分方程,是二阶常系数线性齐次方程。
由微分方程理论可知,式(2-3)的通解为t p C t p C x n 2n 1sin cos +=其中C 1和C 2为积分常数,由物块运动的起始条件确定。
设0=t 时,x x xx ==00,&&。
可解得 C x 10= n02p xC &=t p p xt p x x n n0n 0sin cos &+= (2-4) 式(2-4)亦可写成下述形式)sin(n α+=t p A x (2-5)26 其中⎪⎪⎩⎪⎪⎨⎧=+=)arctan()(00n 2n020x x p p x x A &&α (2-6) 式(2-4)、(2-5)是物块振动方程的两种形式,称为无阻尼自由振动,简称自由振动。
●谐变化的力在谐位移上的功是●运动较慢时,=, 外力主要用于克服弹簧力,一周中所作功为零●运动较快时,, 外力分量克服阻尼力,一部分功转变为热能●共振时,,外力平衡阻尼力,功全部消耗于阻尼⏹阻尼振幅⏹阻尼消耗的功=外力功⏹⏹共振●这是相位差为的频率下的振幅,接近于最大振幅的频率能量法求解共振振幅每周的能量振幅外力阻尼力0A B C共振时的放大因子共振另一方面,有阻尼振动的对数衰减率近似为 共振时的放大因子用对数衰减率表示为瞬态振动和稳态振动瞬态振动稳态振动特解例题汽车重千克,装在四只弹簧上,在车身重量作用下弹簧下压厘米,四只缓冲器,每只在1厘米/秒的速度时具有阻尼系数千克。
把车子和四只车轮一起安装在一个试验台上,实验台以共振速率上下运动,振幅为厘米。
假定中心时在轴距中心处,试求车身在弹簧上的振幅。
解:rad具有振幅的弹簧顶部的运动相当于在质量上具有振幅的力kgcm●假定弹簧质量体系,由旋转机械的不平衡运动激励,只能竖向运动●不平衡部分用一个离心质量表示,离心距为,角速度为●表示非旋转部分的位移(以静平衡位置为参考),的运动可以表示为考虑阻尼影响的转动失衡2014/10/2232运动平衡方程sinsin这个方程与具有振幅的弹簧顶部运动导致的振动方程是一样的,令, 可直接得到振动的振幅tan332014/10/22进一步,可以写成如下的无量纲关系tan342014/10/22转动失衡受迫振动幅频和相频特性352014/10/22●前面的例子是旋转不平衡发生在单一平面内,现在讨论在几个平面内的平衡情况●静不平衡⏹不平衡质量都在同一平面内,合力是一个单一的径向力⏹这种不平衡可以用静态试验测出来,即把轮-轴架在轨道上,使其停留在某个位置:重心在轴的下方⏹不用转动轮子就可以测得不平衡位置●动不平衡⏹不平衡出现在多个平面内⏹合力是一个集中力和一个摇摆力矩⏹通过旋转转子才能测出转子失衡2014/10/2236平衡机一般来讲,比较长的转子,例如马达的电枢或者汽车的发动机的机轴,汽车的轮毂和轮胎,都可以认为是一系列薄盘组成,每个薄盘都带有不同程度的失衡⏹用于检测并修正转子失衡的机器叫平衡机⏹平衡机包含弹性支承用于通过运动检测不平衡力⏹测得支承振动幅度和相对相位,进而确定转子的不平衡量并进行修正⏹这是一个二自由度问题:转子的平动和转动是同时发生的372014/10/22●在设计机械具体实施上述原理的检测过程的时候,会采用各种振动传感器、光电传感器,测量其振动情况和转速同步信号,确定失衡重点的位置,然后根据需要对转子进行加重法和去重法的对转子进行平衡加工⏹加重法:在不平衡相反方向配上校正重块。
习 题2-1已知系统的弹簧刚度k =800 N/m ,作自由振动时的阻尼振动周期为1.8s ,相邻两振幅的比值12.41=+i i A A ,若质量块受激振力t t F 3cos 360)(=N 的作用,求系统的稳态响应。
解:由题意,可求出系统的运动微分方程为t mxn x p x n 3cos 36022=++ 得到稳态解)3cos(α-=t B x其中m kB B B 45.03604)1(022220==+-=λζλ222122tg λζλωωα-=-=n p n 由d nT i iA A e 2.41===+η489.3π2797.0ln 8.1ln ======dd dd dT p T n T nT ηη 又22n p p n d -=有579.3222=+=n d n p n p p45.51255.1298.0374.0838.01838.0223.02tg 103.1408.045.0838.0223.04)838.01(45.0223.0579.3797.0838.0579.332222===-⨯⨯===⨯⨯+-=======ααζωλB p n p n n所以 x =1.103 cos(3t -51︒27')2-2一个无阻尼弹簧质量系统受简谐激振力作用,当激振频率ω1 =6rad/s 时,系统发生共振;给质量块增加1 kg 的质量后重新试验,测得共振频率ω2 =5.86rad/s ,试求系统原来的质量及弹簧刚度。
解:设原系统的质量为m ,弹簧常数为k 由m kp n =,共振时m kp n ==1ω 所以 mk =6 ①又由 当 86.512=+==m kp n ω ② ①与②联立解出 m =20.69 kg ,k =744.84 N/m2-3总质量为W 的电机装在弹性梁上,使梁产生静挠度st δ,转子重Q ,重心偏离轴线e ,梁重及阻尼可以不计,求转速为ω时电机在垂直方向上稳态强迫振动的振幅。
习 题2-1已知系统的弹簧刚度k =800 N/m ,作自由振动时的阻尼振动周期为1.8s ,相邻两振幅的比值12.41=+i i A A ,若质量块受激振力t t F 3cos 360)(=N 的作用,求系统的稳态响应。
解:由题意,可求出系统的运动微分方程为t mxn x p x n 3cos 36022=++ 得到稳态解)3cos(α-=t B x其中m kB B B 45.03604)1(022220==+-=λζλ222122tg λζλωωα-=-=n p n 由d nT i iA A e 2.41===+η489.3π2797.0ln 8.1ln ======dd dd dT p T n T nT ηη 又22n p p n d -=有579.3222=+=n d n p n p p45.51255.1298.0374.0838.01838.0223.02tg 103.1408.045.0838.0223.04)838.01(45.0223.0579.3797.0838.0579.332222===-⨯⨯===⨯⨯+-=======ααζωλB p n p n n所以 x =1.103 cos(3t -51︒27')2-2一个无阻尼弹簧质量系统受简谐激振力作用,当激振频率ω1 =6rad/s 时,系统发生共振;给质量块增加1 kg 的质量后重新试验,测得共振频率ω2 =5.86rad/s ,试求系统原来的质量及弹簧刚度。
解:设原系统的质量为m ,弹簧常数为k 由m kp n =,共振时m kp n ==1ω 所以 mk =6 ①又由 当 86.512=+==m kp n ω ② ①与②联立解出 m =20.69 kg ,k =744.84 N/m2-3总质量为W 的电机装在弹性梁上,使梁产生静挠度st δ,转子重Q ,重心偏离轴线e ,梁重及阻尼可以不计,求转速为ω时电机在垂直方向上稳态强迫振动的振幅。
解:列出平衡方程可得:222()sin sin()sin()st Q W W k x w e wt x g gW Qx kx w e wt g g kg Qx x w e wt W Wππ-σ+-=+=++=+所以:2n kgP W Q h w e W==, 又因为st st W W k k =σ=σ即 ()22222()nstst hB PW w e B W g w =-σ-σ将结果代入得:Q =即为所求的振幅2-4如题2-4图所示,作用在质量块上的激振力t F t F ωsin )(0=,弹簧支承端有运动t a x s ωcos =,写出系统的运动微分方程,并求稳态振动。
题2-4图解:选0s x =时物块平衡位置为坐标原点O ,建立坐标系,如右图, 则 ()()s mx k x x p t +-= 即 ()s mx kx kx p t +=+即 0cos sin mx kx ka wt p wt +=+ (*)0p 改成0F ,下面也都一样 利用复数求解 , 用 jwt e 代换sinwt 并设方程(*)的特解为()jwt x t Be = 代入方程(*)得02j p jka B Be k mwφ+==- 其中B 为振幅,φ为响应与激励之间的相位差,有22022p ka B B k mw k mw ⎛⎫⎛⎫==+ ⎪ ⎪--⎝⎭⎝⎭=()()()222042022********22242211n n n n p p a p a p k a p mm m p w p λλ+++==---2202211p a kλ=+-。
2002kaka k mw tg p p k mwφ-==- 0ka arctg p φ∴= ()2202201()sin sin arc 1p ka x t B wt a wt tg k p φλ⎛⎫∴=+=++ ⎪-⎝⎭ 其中,n n w kp p mλ==2-5如题2-5图的弹簧质量系统中,两个弹簧的连接处有一激振力t F ωsin 0,求质量块的振幅。
解:设弹簧1,2的伸长分别为x 1和x 2,则有,21x x x += (A )由图(1)和图(2)的受力分析,得到t P x k x k ωsin 02211+= (B )22x k xm -= (C ) 题2-5图联立解得,t P k k k x k k k k x m ωsin 02122121+++-=t P mk k k x m k k k k xωsin )()(02122121+=++所以)(2121k k m k k p n =,n = 0,得,2102222222)(11)2()1(1)2()(nnp k P kH n p hB ωςλλωω-=+-=+-=2-6在题2-6图示的系统中,刚性杆AB 的质量忽略不计,B 端作用有激振力t F ωsin 0,写出系统运动微分方程,并求下列情况中质量m 作上下振动的振幅值∶(1)系统发生共振;(2) ω等于固有频率p n 的一半。
解:图(1)为系统的静平衡位置,以θ为系统的广义坐标,画受力如图(2)t lF l k l l c l I ωθθθsin 3)3(3)2(20+⋅⋅-⋅⋅⋅-= 又 I =ml 2 t F mlmk mc ωθθθsin 340=9++∴ 则⎪⎪⎩⎪⎪⎨⎧===mlF h m c n m kp n 023,429题2-6图mgθBF 0sin ωtA X AY AF CF K22222222)2()()2()(ωωωωθθn p hllB B n p hB n n +-==+-=1)系统共振,即 ω=n pkmc F mkm c l ml F np hl B n 494)/3(200=⨯⨯==∴ 2)n p 21=ωmkc kF m k m c m k l ml F np p hl B n n 81641194944273)(432222222+=+⎪⎭⎫⎝⎛⨯=+⎪⎭⎫ ⎝⎛=∴2-7写出题2-7图示系统的运动微分方程,并求系统固有频率p n 、阻尼比ζ及稳态响应振幅。
解:以刚杆转角ϕ为广义坐标,由系统的动量矩定理ϕϕϕ22)(4cl l x l k m l s ---= 即 t lka m k m c ωϕϕϕsin 44=++ 令,m k p n 4=,m c n 42=,n n mp c p n 8==ς,mlkah 4=,n p ωλ=得到2222)2()(ωωϕn p hB n+-=22222222)2()1(2)2()1(242ςλλωωϕ+-=+-⨯==ap p n p p l mlkal B B nn nn题2-7图2-8一机器质量为450kg ,支承在弹簧隔振器上,弹簧静变形为0.5cm 。
机器有一偏心重,产生偏心激振力gF 20254.2ω=N ,其中ω是激励频率,g 是重力加速度。
求(1)在机器转速为1200 r/min时传入地基的力;(2)机器的振幅。
解:设系统在平衡位置有位移x , 则0mx kx F +=,即0F kx x m m+=,又有st mg k δ= 则st mg k δ= (1) 所以机器的振幅为2021F B k λλ=- (2) 且n p ωλ=,40rad s ωπ=(3) 又有2n stk gp m δ==(4) 将(1)(2)(4)代入(2)得机器的振幅B =0.584 mm 则传入地基的力为514.7T p kB N ==2-9一个粘性阻尼系统在激振力t F t F ωsin )(0=作用下的强迫振动力为⎪⎭⎫⎝⎛+=6πsin )(t B t x ω,已知F 0=19.6N ,B =5 cm ,π20=ωrad/s ,求最初1秒及1/4秒内,激振力作的功W 1及W 2。
解:由已知可得:()t F t F π20sin 0=()()()()Jtt t t t t tt x t F W t t B t x 39.15d π80cos 1π9.4|40π40cos 39.4d 6ππ20cos ππ20sin 6.19d 6ππ20cos π6πcos 110111-=---=⎪⎭⎫ ⎝⎛+⋅==⎪⎭⎫ ⎝⎛+=⎪⎭⎫ ⎝⎛+=⎰⎰⎰ωω同理可得:()()Jt t t tt x t F W 0395.0d 6ππ20cos ππ20sin 6.19d 401040102=⎪⎭⎫ ⎝⎛+⋅==⎰⎰2-10无阻尼系统受题2-10图示的外力作用,已知0)0()0(==xx ,求系统响应。
周期函数才用频谱分析!解:由图得激振力方程为⎪⎩⎪⎨⎧〉≤≤-〈≤=22111100)(t t t t t P t t P t F当 0 < t < t 1时,1)(P F =τ,则有]cos 1[)(sin )(2101t p mp Pd t p mp P t x n n tn n-=-=⎰ττ 由于mkp n =2,所以有 ]cos 1[)(1t p kP t x n -=当t 1 < t < t 2时,1)(P F -=τ,则有⎰-=11)(sin )(t n n d t p mp P t x ττ⎰--+t t n nd t p mp P 1)(sin 1ττ)](cos 1[]cos )([cos 1111t t p kPt p t t p k P n n n -----=当 t < t 2时,0)(=τF ,则有⎰-=11)(sin )(t n n d t p mp P t x ττ⎰--+t t n nd t p mp P 1)(sin 1ττ+ 0题2-10图)](cos)([cos]cos)([cos12111ttpttpkPtpttpkPnnnn------=2-11如题2-11图的系统,基础有阶跃加速度bu(t),初始条件为0)0()0(==xx ,求质量m的相对位移。
解:由牛顿定律,可得系统的微分方程为)()(ssxxkxxcxm----=令)(srxxx-=,则有)(tmbukxx cxmrrr-=++得到系统的激振力为,)()(ττmbuF-=,可得响应为)cossin1()](cos)(sin[)(sin)(222222)(tpetppnepnbtpePnptpepnnepbdtpempmbtxdntddntdtdndddndntdtdtndr-------+-=-++-+-=--=⎰τττττττ其中22nppnd-=,mkpn=2,mcn=2。
2-12上题系统中,若基础有阶跃位移au(t),求零初始条件下的绝对位移。
解:由上题可得系统的微分方程为()()s smx k x x c x x=-+-即s smx cx kx kx cx++=+基础有阶跃位移为()au t故sx=0sx=()au t()mx cx kx kau t∴++=得到系统的激振力为,)()(ττkauF=,可得响应为()()()()sint n tddFx t e p t dtmpτττ--=-⎰⎰-=--tdtnddtpempkau)()(sin)(ττττ题2-11图22221sin cos nt n d d d d nt d d p p ka n e e p t p t mp n p n e n n τ-⎡⎤⎛⎫=-+ ⎪⎢⎥+⎝⎭⎣⎦ 1sin cos n p t nd d d p ae p t p t p ζζ-⎡⎤⎛⎫=+-⎢⎥⎪⎝⎭⎣⎦ 其中22n p p n d -=,m k p n =2,mcn =2。