aod去雾算法原理
- 格式:docx
- 大小:36.82 KB
- 文档页数:1
色彩空间中的单幅图像自适应去雾算法I. 引言介绍雾现象的影响和重要性,以及雾去除算法的研究现状和意义。
II. 相关工作对近年来雾去除算法进行综述和比较,包括传统的物理模型方法和基于深度学习的方法。
III. 色彩空间中的自适应去雾算法介绍本研究提出的基于色彩空间的自适应去雾算法,包括算法的整体流程、基本假设和总体思路,以及每个步骤的详细实现方法。
IV. 实验与分析使用许多真实和人工数据集进行算法评估,包括比较不同去雾算法的结果、分析算法性能和参数敏感性,以及演示算法结果的视觉效果。
V. 结论和未来工作总结本研究的主要贡献和特点,以及算法在实际应用中的局限性和改进方向,包括对数据集、算法参数、计算效率和可扩展性等方面的全面分析和讨论。
VI. 参考文献列举使用过的文献,包括相关论文、标准和数据集。
一、引言雾是常见的自然气象现象,它是由于水蒸气与气体和颗粒物质混合形成的一种可见浮游物,是给人们带来不便和危害的元凶之一。
在摄影、视频市场中,雾化图像会降低图片的质量和清晰度,给视觉感受带来不良的影响。
因此,研究雾去除算法具有广泛的现实意义和应用价值。
传统的雾去除算法主要采用物理模型,建立起相应的数学模型来描述雾化过程,通过估计雾化图像中的大气光、深度和反射等物理参数,来实现雾去除的效果。
但这类算法对于前景目标遮挡、薄雾或逆天大雾等问题的处理存在限制。
基于深度学习的雾去除算法的出现,极大地改变了传统方法的缺陷。
这类算法利用深度学习技术对图像内容和深度信息进行学习和分析,通过神经网络和大量样本的训练,来实现图像去雾与复原。
但是受限于样本的数量和种类,这类方法在特定场景下学习的效果往往不尽如人意。
近年来,色彩空间被广泛应用到各种图像处理技术中,包括图像增强、图像拼接、图像分割和目标检测等。
与传统颜色空间相比,色彩空间体现了人类视觉感知机制,增加了颜色对比度、提高了图像的信息量,能够更好地满足对图像色彩的需求。
色彩空间中的单幅图像自适应去雾算法是一种新的算法,它利用图像的色彩信息和本身的导向信息,采用自适应方式对雾化图像进行修改和改进,从而达到最佳的图像去雾效果。
去雾算法的原理雾天拍照或者看监控画面的时候,那雾蒙蒙的感觉真的很讨厌,啥都看不清楚。
不过呢,有个超酷的东西叫去雾算法,就像一个魔法一样,能把雾给驱散,让画面变得清晰起来。
咱们先来说说雾是怎么影响画面的哈。
雾就像是一个调皮捣蛋的小坏蛋,它会让光线变得乱七八糟的。
本来好好的光线,直直地从物体上反射到咱们眼睛或者摄像头里,雾一来,就把光线给散射得到处都是。
这就好比一群规规矩矩排队的小朋友,突然来了个调皮鬼,把大家都撞得东倒西歪,乱成一团。
所以咱们看到的画面就变得白茫茫的,远处的东西就像被一层白色的纱给盖住了,细节啥的都看不到了。
那去雾算法是怎么来应对这个调皮的雾呢?有一种比较常见的原理是基于物理模型的。
想象一下,雾里的光线传播就像是一场复杂的旅程。
去雾算法就像是一个超级聪明的导游,它知道光线在雾里的传播规律。
这个算法会假设雾是均匀分布的,虽然实际情况可能不完全是这样,但这是个很好的开始。
它会根据一些数学公式,来计算雾对光线的影响程度。
比如说,它会考虑到雾的浓度、光线的衰减等等因素。
就好像这个导游知道路上有多少个小坑洼(雾的浓度),会让游客(光线)走得多艰难(光线衰减),然后想办法把这些影响去掉,让游客能顺利到达目的地(让画面清晰)。
还有一种基于暗通道先验的去雾算法也很有趣呢。
暗通道是啥呢?简单来说,在没有雾的自然图像里,大多数局部区域都有一些像素点是非常暗的。
可是雾一来,就把这些暗的地方都给“洗白”了。
这个算法就抓住了这个特点,先找到图像的暗通道。
然后根据暗通道里的信息来估计雾的浓度。
这就像是发现了雾这个调皮鬼留下的小尾巴,通过这个小尾巴就能知道它到底有多调皮(雾的浓度),然后就可以有针对性地把雾给赶走啦。
另外呀,有些去雾算法还会用到深度学习的方法。
这就像是请了一个超级智能的小助手,这个小助手看过无数有雾和无雾的图像,然后学会了怎么把有雾的图像变成无雾的。
它会自动从图像里提取各种特征,就像我们人看东西会注意到颜色、形状这些特征一样。
第 38 卷第 4 期2023 年 4 月Vol.38 No.4Apr. 2023液晶与显示Chinese Journal of Liquid Crystals and Displays基于雾气分布的大气光幕估计去雾算法杨燕,张雯波*(兰州交通大学电子与信息工程学院,甘肃兰州 730070)摘要:由于雾霾天气下空气中介质粒子的影响,成像设备所捕获的图像通常会存在对比度低、色彩丢失等问题。
针对这些问题,本文提出一种基于雾气分布的大气光幕估计去雾算法。
首先,将Fade方法提取的初始雾气分布图像进行阈值分割与细化处理得到较为准确的雾气分布信息。
其次,通过分析景深、雾浓度、大气光幕之间的关系建立大气光幕估计模型。
最后,通过亮度权重图与自适应大气光阈值选取大气光区域,获取较为准确的大气光,进而恢复退化场景。
实验与结果表明,本文算法恢复的图像清晰自然,去雾效果彻底,并且能够保留图像中的细节信息。
关键词:图像去雾;雾气分布;大气光幕估计模型;亮度偏差;自适应大气光阈值中图分类号:TP391.41 文献标识码:A doi:10.37188/CJLCD.2022-0237Dehazing algorithm with atmospheric light veil estimationbased on haze distributionYANG Yan,ZHANG Wen-bo*(School of Electronics and Information Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China)Abstract:Due to the influence of medium particles in the air under hazy weather,the images captured by imaging devices usually suffer from low contrast and color loss.To address these problems,an atmospheric light veil estimation dehazing algorithm based on haze distribution is proposed in this paper.Firstly,the initial haze distribution image extracted by twelve features of the image is subjected to thresholding and refinement to obtain more accurate haze distribution information.Secondly,the atmospheric light veil estimation model is established by analyzing relationships among the depth of field,haze concentration,and atmospheric light veil.Finally,the atmospheric light region is selected by luminance weighting map and adaptive atmospheric light threshold, and then recover the degraded scene. The experimental results show that this algorithm restores images clearly and can retain detailed information in the image.Key words: image dehazing;haze distribution;estimation model of atmospheric veil;luminance deviation;adaptive atmospheric light threshold文章编号:1007-2780(2023)04-0534-09收稿日期:2022-07-13;修订日期:2022-08-18.基金项目:甘肃省教育厅高等学校产业支撑计划(No.2021CYZC-04)Supported by College Industry Support Plan Project of Gansu Provincial Department of Education (No.2021CYZC-04)*通信联系人,E-mail:522380710@第 4 期杨燕,等:基于雾气分布的大气光幕估计去雾算法1 引言在雾天场景下,由于大气中存在的悬浮粒子对成像过程有一定的干扰作用,使得成像设备捕获到的图像存在视觉效果差、对比度降低、细节丢失等问题,导致一些计算机视觉系统难以正常工作,例如自动车辆导航、户外监控、遥感以及目标识别等。
除雾器工作原理引言概述:除雾器是一种常见的设备,用于去除汽车、飞机、船舶等物体表面的雾气。
它通过特定的工作原理实现了高效的除雾效果。
本文将详细介绍除雾器的工作原理,以匡助读者更好地理解其运作机制。
一、物理原理1.1 蒸发冷却除雾器利用物体表面的蒸发冷却原理来去除雾气。
当物体表面温度高于空气中的露点温度时,空气中的水蒸气会在物体表面凝结成水滴。
而除雾器通过提供低于露点温度的表面温度,使得空气中的水蒸气在接触到物体表面时迅速蒸发,从而去除雾气。
1.2 热量传导除雾器还利用热量传导原理去除雾气。
当物体表面温度高于空气中的露点温度时,除雾器会通过导热材料将热量传导到物体表面,使得表面温度升高。
这样一来,空气中的水蒸气在接触到表面时会迅速蒸发,从而消除雾气。
1.3 物体表面涂层除雾器还可以通过在物体表面涂层来去除雾气。
这种涂层通常具有特殊的亲水性,能够使水蒸气在表面上形成薄膜而不是水滴。
这样一来,雾气就无法形成,从而实现了除雾的效果。
二、除雾器的类型2.1 加热除雾器加热除雾器通过提供热量来去除雾气。
它通常使用电加热元件或者热水循环系统来产生热量,将其传导到物体表面,从而加速雾气的蒸发。
2.2 冷却除雾器冷却除雾器通过降低物体表面的温度来去除雾气。
它通常使用冷却装置或者制冷剂循环系统来提供低温,从而使得物体表面的温度低于空气中的露点温度,实现除雾效果。
2.3 涂层除雾器涂层除雾器通过在物体表面施加特殊的涂层来去除雾气。
这种涂层通常具有特殊的化学性质,能够使水蒸气在表面上形成薄膜而不是水滴,从而实现除雾的效果。
三、除雾器的应用领域3.1 汽车除雾器汽车除雾器是一种常见的除雾设备,用于去除汽车前挡风玻璃上的雾气。
它通常采用加热或者冷却的方式,通过提供适当的温度来去除雾气,提高行车安全性。
3.2 飞机除雾器飞机除雾器用于去除飞机机身和机翼表面的雾气。
由于飞机在高空飞行时会遇到低温和高湿度的气候条件,因此除雾器在飞机上尤其重要,可以提高飞行的可靠性和安全性。
电阻去雾器的工作原理及性能分析电阻去雾器是一种常用的空气净化设备,可以有效去除空气中的颗粒物和雾霾。
在工业生产过程中,电阻去雾器被广泛应用于烟气净化、炉窑除尘、化工废气处理等领域。
本文将深入探讨电阻去雾器的工作原理以及其性能分析。
一、电阻去雾器的工作原理电阻去雾器的工作原理主要分为两个步骤:电吹风效应和电沉积效应。
1. 电吹风效应电阻去雾器的关键部件是电极板和传导丝。
当高压电场施加在电极板和传导丝之间时,电场使得空气中颗粒物带电。
带电颗粒物会在电场的作用下产生电吹风效应,即受到电场力的作用而运动。
2. 电沉积效应带电颗粒物在电场的作用下,由于电场力的引导和吸附,沿着电场方向运动。
当带电颗粒物接触到电极板时,发生电沉积效应。
电极板上的电子会与颗粒物上的带电离子发生电子转移反应,使颗粒物带电量降低,进而沉积在电极板上。
通过电吹风效应和电沉积效应的共同作用,电阻去雾器可以有效地捕捉和去除空气中的颗粒物和雾霾。
二、电阻去雾器的性能分析1. 捕集效率捕集效率是评价电阻去雾器性能的重要指标。
它表示了电阻去雾器对颗粒物的捕集能力。
捕集率越高,说明电阻去雾器对颗粒物的去除效果越好。
捕集效率受到多种因素的影响,包括电场强度、空气流速、颗粒物大小等。
通常情况下,捕集效率与电场强度和空气流速呈正相关关系,但与颗粒物大小呈负相关关系。
2. 压降压降是电阻去雾器的另一个重要性能指标。
它表示了空气通过电阻去雾器时所受到的阻力,即电阻。
压降越大,说明电阻去雾器的阻力越大,流通能力越差。
因此,低压降是电阻去雾器的一个重要特点,可以减小能耗、降低设备成本。
3. 维护成本电阻去雾器的维护成本也是需要考虑的因素之一。
维护成本包括定期清洗电极板和更换传导丝等方面。
传导丝受到颗粒物的腐蚀和磨损,需要定期更换。
电极板上的颗粒物也需要定期清洗,以保证电阻去雾器的正常运行。
4. 适应性不同环境条件下使用电阻去雾器时,其性能也会有所差异。
电阻去雾器的适应性表示其在不同气候条件、颗粒物浓度以及排放标准下的适用性。
图像去雾----暗通道暗通道去雾算法原理及实现1. 算法原理。
基本原理来源于何凯明⼤神的CVPR09的论⽂暗通道。
所谓暗通道是⼀个基本假设,这个假设认为,在绝⼤多数的⾮天空的局部区域中,某⼀些像素总会有⾄少⼀个颜⾊通道具有很低的值。
这个其实很容易理解,实际⽣活中造成这个假设的原因有很多,⽐如汽车,建筑物或者城市中的阴影,或者说⾊彩鲜艳的物体或表⾯(⽐如绿⾊的树叶,各种鲜艳的花,或者蓝⾊绿⾊的睡眠),颜⾊较暗的物体或者表⾯,这些景物的暗通道总是变现为⽐较暗的状态。
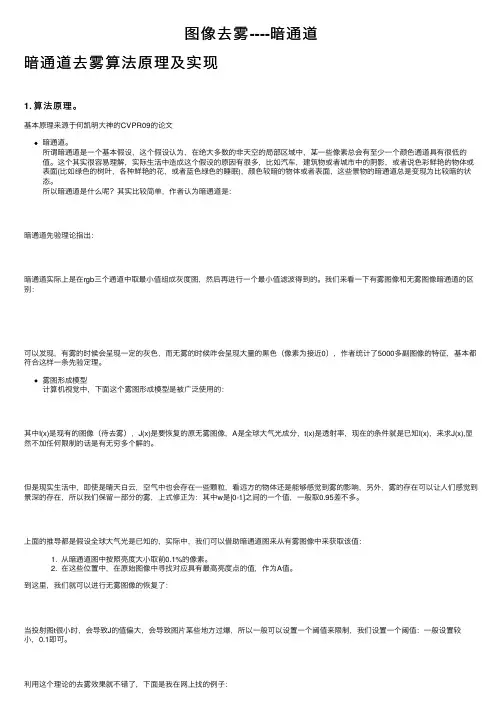
所以暗通道是什么呢?其实⽐较简单,作者认为暗通道是:暗通道先验理论指出:暗通道实际上是在rgb三个通道中取最⼩值组成灰度图,然后再进⾏⼀个最⼩值滤波得到的。
我们来看⼀下有雾图像和⽆雾图像暗通道的区别:可以发现,有雾的时候会呈现⼀定的灰⾊,⽽⽆雾的时候咋会呈现⼤量的⿊⾊(像素为接近0),作者统计了5000多副图像的特征,基本都符合这样⼀条先验定理。
雾图形成模型计算机视觉中,下⾯这个雾图形成模型是被⼴泛使⽤的:其中I(x)是现有的图像(待去雾),J(x)是要恢复的原⽆雾图像,A是全球⼤⽓光成分,t(x)是透射率,现在的条件就是已知I(x),来求J(x),显然不加任何限制的话是有⽆穷多个解的。
但是现实⽣活中,即使是晴天⽩云,空⽓中也会存在⼀些颗粒,看远⽅的物体还是能够感觉到雾的影响,另外,雾的存在可以让⼈们感觉到景深的存在,所以我们保留⼀部分的雾,上式修正为:其中w是[0-1]之间的⼀个值,⼀般取0.95差不多。
上⾯的推导都是假设全球⼤⽓光是已知的,实际中,我们可以借助暗通道图来从有雾图像中来获取该值:1. 从暗通道图中按照亮度⼤⼩取前0.1%的像素。
2. 在这些位置中,在原始图像中寻找对应具有最⾼亮度点的值,作为A值。
到这⾥,我们就可以进⾏⽆雾图像的恢复了:当投射图t很⼩时,会导致J的值偏⼤,会导致图⽚某些地⽅过爆,所以⼀般可以设置⼀个阈值来限制,我们设置⼀个阈值:⼀般设置较⼩,0.1即可。
去雾相机指标-概述说明以及解释1.引言1.1 概述概述部分的内容可能如下:引言部分是一篇长文的开端,它的主要目的是为读者提供一个整体的背景和概况。
本文将讨论有关去雾相机的技术指标,旨在帮助读者更好地了解和选择相机设备。
如今,随着摄影技术的不断发展,去雾相机成为了摄影爱好者和专业摄影师们越来越关注的一个话题。
在日常生活和摄影创作中,雾霾、露天活动等天气条件常常给拍摄带来挑战,会模糊图像细节,影响照片质量。
因此,对于那些希望在不利天气条件下获得清晰照片的人来说,去雾相机是一个有力的解决方案。
本文将从雾的影响因素入手介绍去雾相机的原理和技术指标。
前者包括了雾霾对图像质量的影响因素,如雾浓度、雾颜色和光传播等;后者则涵盖了衡量去雾相机性能的重要指标,如图像恢复质量、去雾效果和图像细节保留程度等。
通过对这些内容的深入分析,本文旨在帮助读者更好地理解去雾相机的技术原理和性能指标,为他们在购买和使用相机时提供一定的参考依据。
同时,也希望通过本文的介绍,读者们能够更加深入地了解如何应对不利天气条件下的拍摄挑战,提升照片质量和观赏体验。
接下来的章节将分别从影响雾的因素、去雾相机的原理和技术指标几个方面展开讨论,最后在结论部分对整篇文章进行总结,并展望未来去雾相机的发展方向。
让我们一起深入研究去雾相机的指标,探索提高照片质量的奥秘吧!文章结构文章的结构设计是为了提供读者一个清晰的思路和逻辑框架,使文章整体可读性强。
本篇文章将按照以下结构来进行展开:1. 引言1.1 概述1.2 文章结构1.3 目的2. 正文2.1 雾的影响因素2.2 去雾相机的原理2.3 去雾相机的技术指标3. 结论3.1 总结3.2 展望在引言部分,我们首先对本文要介绍的内容进行概述,即介绍去雾相机指标的背景和意义。
然后,我们将详细介绍文章的结构,以引导读者更好地理解和阅读文章。
最后,我们明确文章的目的,即通过介绍去雾相机指标的相关内容,使读者了解去雾相机的基本原理和技术指标。
暗通道去雾算法原理暗通道去雾算法是一种常用的图像去雾方法,它基于暗通道先验原理,在图像中预先找到暗通道并利用其估计场景深度和大气光,从而去除图像中的雾霾。
该算法具有计算速度快、效果稳定等优点,在计算机视觉、图像处理等领域具有广泛的应用。
下面我们将详细介绍暗通道去雾算法的原理。
一、判定暗通道对于一张含有雾的图片I,其在某个像素位置的亮度值可以表示为I(x),其中x为该像素的坐标位置。
根据图像去雾的基本原则,假设原始场景的亮度值为J(x),则I(x)可以被表示为:I(x)=J(x)t(x)+A(1-t(x))其中t(x)表示该像素处的透射率,A表示场景的大气光,1-t(x)表示该像素的反射率。
对于一张图像,其暗通道一般可以通过以下公式计算:Dc(x)=min(min(Jr,Jg),Jb)其中Dc表示暗通道,Jr,Jg,Jb分别表示图片每个像素点处的红、绿、蓝通道的值。
该公式的物理意义是,在具有较强雾霾的区域,颜色值越小的像素点更容易透过雾霾,因此在暗通道中颜色值最小的像素点更可能是无雾情况下的颜色。
二、估计大气光在使用暗通道先验原理求图像场景深度之前,需要先估计图片中的大气光。
根据上述公式,Dc的最小值与大气光A具有关联,可以通过以下公式计算:A=argmax(I(x))其中argmax表示取所有像素点中亮度值最大的像素点的位置,该位置即为大气光所在位置。
由于大气光通常在图片中位置比较靠近,因此可以针对一个较小的图片区域进行计算,以提高速度和准确性。
需要注意的是,由于图像中可能存在比大气光更亮的物体,如光源等,因此在计算大气光时需要对这些物体作出排除。
三、估计场景深度场景深度是指光线在经过物体时所穿过的距离,能够用于估计透射率。
根据暗通道先验原理,可以使用暗通道估计场景深度。
具体而言,可以通过以下公式计算场景深度:t(x)=1-ωmin(D(x)/A)其中ω表示全局透射率的权重,通常设置在0.95左右。
基于AOD-Net改进的轻量级图像去雾算法鄢江涛(三峡大学计算机与信息学院,湖北宜昌443000)摘要:针对雾天图像模糊的问题,提出一种改进的AOD-net网络。
为了解决AOD-Net损失函数对图像亮度和对比度关注度不足,文章对AOD-Net进行了优化,并改进了损失函数为SSIM-L1。
处理合成雾数据(NYU2),与DCP、Dehaze-Net 和AOD-Net相比,文章方法的平均PSNR为23.865。
本文方法的HVS-MaxPol_2指标在测试处理真实有雾图像领先。
实验结果表明,本文提出的改进AOD-Net网络方法提升了去雾后的视觉效果。
关键词:图像去雾;深度学习;HVS-MaxPol;AOD-Net中图分类号:TP393文献标识码:A文章编号:2096-9759(2023)07-0040-04Improved lightweight image defogging algorithm based on AOD-netYAN Jangtao(School of Computer and Information Science,China Three Gorges University,Yichang443000,China)Abstract:An improved AOD-net network is proposed to solve the problem of blurred images in foggy days.In order to solve the problem that AOD-Net loss function does not pay enough attention to image brightness and contrast,this paper optimizes AOD-Net and improves the loss function to SSIM-L1.When processing synthetic fog data(NYU2),the average PSNR of the proposed method is23.865compared with DCP,Dehadce-Net and AOD-Net.The HVS-MaxPol_2index of the proposed meth-od is leading in the test processing of real fog images.Experimental results show that the improved AOD-Net network method proposed in this paper improves the visual effect after fog removal.Key words:image defogging;Deep learning;HVS-MaxPol;AOD-Net0引言在雾霾天,光线会被空气中微小的悬浮粒子折射和散射。
科技与创新|Science and Technology & Innovation2024年 第02期DOI :10.15913/ki.kjycx.2024.02.033基于深度学习的单幅图像去雾算法综述*李武劲,刘昱泽,刘道城,姜 林,罗 娜(湖南理工学院,湖南 岳阳 414000)摘 要:随着人工智能技术的快速发展,深度学习已经成为解决图像去雾问题的主要方法之一。
综述了当前深度学习在图像去雾中的应用研究进展,主要包括基于传统卷积神经网络的方法、基于生成对抗网络的方法、多尺度方法等。
对比分析了不同方法的优缺点,并对未来的研究方向进行了探讨。
关键词:深度学习;单幅图像去雾算法;图像去雾;多尺度方法中图分类号:TP391.41;TP18 文献标志码:A 文章编号:2095-6835(2024)02-0114-03——————————————————————————*[基金项目]2022年度湖南省大学生创新创业训练计划一般项目“基于自相似性的水下图像清晰化算法研究”(编号:5373)图像去雾是计算机视觉领域中的一个重要问题,其目的是从有雾图像中还原出无雾图像。
在现实世界中,由于自然灾害、人为排放等原因,雾化图像广泛存在。
这些雾化图像通常会降低图像的质量、图像的视觉效果和识别精度。
因此,图像去雾已经成为计算机视觉中的一个重要研究方向。
在图像去雾领域,传统方法主要是基于物理模型方法,如暗通道先验方法[1]、颜色恢复方法[2]等。
但这些方法通常需要手动选择参数,处理复杂场景的效果有限。
随着深度学习技术的快速发展,基于深度学习的图像去雾算法逐渐成为研究的热点[3-5]。
深度学习算法利用深度神经网络的强大特征提取能力,自适应地学习特定场景下的图像特征,能够更好地还原有雾图像。
1 基于深度学习的单幅图像去雾算法简介深度学习去雾算法通过训练深度神经网络来实现图像去雾。
具体来说,它利用已有的带雾和清晰的图像数据集进行监督学习,训练出一种能够自动从带雾图像中恢复出清晰图像的模型。
第40卷第4期贵州大学学报(自然科学版)Vol.40No.42023年 7月JournalofGuizhouUniversity(NaturalSciences)Jul.2023文章编号 1000 5269(2023)04 0066 07DOI:10.15958/j.cnki.gdxbzrb.2023.04.10一种面向城市道路的视觉图像去雾方法向 巍1,钟魁松2,张振博 2(1.贵州交通职业技术学院,贵州贵阳551400;2.贵州大学机械工程学院,贵州贵阳550025)摘 要:针对雾天环境的城市道路下自动驾驶车辆视觉感知效果不佳的问题,提出一种基于大气光值的快速图像去雾改进算法,并验证了算法的有效性。
首先,制定了大气光动态估算策略,并设计了大气光动态估算的自适应触发函数,通过大气散射模型进行了大气光的估计;其次,利用最小滤波技术获取了雾天图像的暗通道图,并估算了对应的投射图像;再次,制定了大气光计算策略,并优化了去雾系数;最后,利用直方图均衡化算法抑制了残余噪声,进一步提升了无雾图像的对比度。
实验结果表明,所提算法相比DCP、CAP等在NIQE和SSEQ性能指标上都有所提升,拥有更好的细节恢复能力和处理性能,更有利于交通信息的提取。
关键词:自动驾驶;图像去雾;大气散射模型;动态大气光;暗通道;直方图均衡中图分类号:TP391 文献标志码:A 环境感知技术是自动驾驶领域的重要组成部分[1],尤其是随着近年来图像处理技术和计算机硬件技术的飞速发展,基于视觉的环境感知技术也有了较为广泛的应用。
但视觉环境感知技术对环境可视条件依赖较高,尤其是在我国西南地区频繁的雨、雾等不利视觉条件下,自动驾驶车辆的视觉感知效果不甚理想。
因此,针对雾天的图像恢复技术也是环境感知领域面临的难题之一[2]。
目前针对视觉图像的去雾,按照方法机制主要分为三大类[3]。
第一类是基于图像增强的方法,通过去除噪声、增强对比度等方法以达到恢复图像的目的,如直方图均衡化、小波变换、Retinex、同态滤波等算法[4]。
人工消雾原理和方法
用人工方法部分或全部消除雾滴,达到改善能见度目的的作业。
消冷雾(低于0℃)常采用播撒碘化银、液态CO2、液氮等方法产生人工冰核,在过冷雾中诱发冰晶效应,使雾中有限的水分集中到少数冰晶上去,长大后降落到地面。
消暖雾(高于0℃)则常用加热法,即提高气温,使雾滴蒸发,效果一般良好,但耗能较多,重要机场才使用。
正在试验的方法有:(1)撒吸湿性粉末(如氯化钙等)入雾中。
其作用有两方面,即粉末吸收水分后,降低空气湿度,使雾滴蒸发;粉末上凝结长成的水滴在下降途中冲刷雾滴。
(2)用直升飞机下冲的干、暖气流与雾混合,降低雾中湿度使雾蒸发。
(3)在雾中喷撒大量带电质粒,促进雾中的碰并过程,加速雾滴沉降。
第49卷第6期2022年6月Vol.49,No.6Jun.2022湖南大学学报(自然科学版)Journal of Hunan University(Natural Sciences)基于深度多级小波U-Net的车牌雾图去雾算法陈炳权†,朱熙,汪政阳,梁寅聪(吉首大学信息科学与工程学院,湖南吉首416000)摘要:为了解决雾天拍摄的车牌图像边缘模糊、色彩失真的问题,提出了端到端的基于深度多级小波U-Net的车牌雾图去雾算法.以MWCNN为去雾网络的主体框架,利用“SOS”增强策略和编解码器之间的跨层连接整合小波域中的特征信息,采用离散小波变换的像素-通道联合注意力块降低去雾车牌图像中的雾度残留.此外,利用跨尺度聚合增强块补充小波域图像中缺失的空间域图像信息,进一步提高了去雾车牌图像质量.仿真实验表明,该网络在结构相似度和峰值信噪比上具有明显的优势,在处理合成车牌雾图和实际拍摄的车牌雾图上,去雾效果表现良好.关键词:车牌雾图去雾;MWCNN;“SOS”增强策略;跨层连接;注意力;跨尺度聚合中图分类号:TP391.41文献标志码:ADehazing Algorithm of License Plate Fog Image Basedon Deep Multi-level Wavelet U-NetCHEN Bingquan†,ZHU Xi,WANG Zhengyang,LIANG Yincong(College of Information Science and Engineering,Jishou University,Jishou416000,China)Abstract:To solve the problem of edge blurring and color distortion of license plate images taken in foggy weather,an end-to-end depth multilevel wavelet U-Net based algorithm for license plate fog image removal is pre⁃sented.Taking MWCNN as the main frame work of the defogging network,the feature information in the wavelet do⁃main is integrated using the“SOS”enhancement strategy and the cross-layer connection between the codec.The pixel-channel joint attention block of the discrete wavelet transform is used to reduce the fog residue in the defrosted license plate image.In addition,the cross-scale aggregation enhancement blocks are used to supplement the missing spatial domain image information in the wavelet domain image,which further improves the quality of the defogging li⁃cense plate image.The simulation results show that the network has obvious advantages in structural similarity and peak signal-to-noise ratio,and it performs well in dealing with the composite plate fog image and the actual photo⁃graphed plate fog image.Key words:license plate fog image defogging;MWCNN;“SOS”enhancement strategy;cross-layer connection;attention mechanism;cross-scale aggregation∗收稿日期:2021-11-01基金项目:国家自然科学基金资助项目(No.62141601),National Natural Science Foundation of China(No.62141601);湖南省教育厅重点资助项目(21A0326),The SRF of Hunan Provincial Education Department(No.21A0326)作者简介:陈炳权(1972-),男,湖南常德人,吉首大学副教授,硕士生导师,博士†通信联系人,E-mail:****************文章编号:1674-2974(2022)06-0124-11DOI:10.16339/ki.hdxbzkb.2022293第6期陈炳权等:基于深度多级小波U-Net的车牌雾图去雾算法在大雾天气下使用光学成像器件(如相机、监控摄像头等)对目标场景或物体进行拍摄时,往往会使得图像对比度低,边缘、字符等细节信息模糊.图像去雾是图像处理中典型的不适定问题,旨在从雾天图像中复原出相应的无雾图像,作为一种提升图像质量的方法,已被广泛应用于图像分类、识别、交通监控等领域.近年来,针对不同场景(室内家居场景、室外自然场景、交通道路场景、夜间雾霾场景等)下均匀雾度或非均匀雾度图像的去雾技术引起了广泛关注与研究,但由于实际雾霾对图像影响的复杂多变性,从真实的雾天图像中复原无雾图像仍具有诸多挑战性.图像去雾技术发展至今,主要分为以下三类:基于数学模型的去雾技术,如直方图均衡[1]、小波变换[2]、色彩恒常性理论[3](Retinex)等;基于大气散射模型(ASM)和相关统计先验的去雾技术,如暗通道先验[4-5](DCP)、色衰减先验[6](CAP)、非局部先验[7](NLP)等;基于深度学习的去雾技术,如Deha⁃zeNet[8]、DCPDN[9]、AODNet[10]等.近年来,深度卷积神经网络在计算机视觉中应用广泛,2019年Liu 等[11]认为传统的卷积神经网络(CNN)在采用池化或空洞滤波器来增大感受野时势必会造成信息的丢失或网格效应,于是将多级小波变换嵌入到CNN中,在感受野大小和计算效率之间取得了良好的折中,因而首次提出了多级小波卷积神经网络(MWCNN)模型,并证实了其在诸如图像去噪、单图像超分辨率、图像分类等任务中的有效性.同年,Yang等[12]也认为离散小波变换及其逆变化可以很好地替代U-Net 中的下采样和上采样操作,因而提出了一种用于单幅图像去雾的小波U-Net网络,该网络与MWCNN结构非常相似.2020年,Yang等[13]将多级小波与通道注意力相结合设计了一种小波通道注意力模块,据此构建了单幅图像去雨网络模型.同年,Peng等[14]则将残差块与MWCNN相结合提出了一种用于图像去噪的多级小波残差网络(MWRN).2021年,陈书贞等[15]在已有的MWCNN结构上加入多尺度稠密块以提取图像的多尺度信息,并在空间域对重构图像进行进一步细化处理,以弥补小波域和空间域对图像信息表示存在的差异性,从而实现了图像的盲去模糊.为了解决大雾天气下车牌图像对比度低和边缘、字符等信息模糊不清的问题,很多研究人员开始将已有的图像去雾技术应用于车牌识别的预处理中.但大多数只是对已有图像去雾算法进行了简单改进,如对Retinex或DCP等去雾算法进行改进,直接应用于车牌检测识别中.虽然取得了一定的去雾效果,但其并没有很好地复原出车牌图像的特征,且很难应对中等雾和浓雾下的车牌图像.2020年王巧月等[16]则有意识地针对车牌图像的颜色和字符信息进行车牌图像的去雾,提高了车牌图像的质量.受上述研究的启发,本文提出一种基于深度多级小波U-Net的车牌雾图去雾算法,以端到端的方式来实现不同雾度下不同车牌类型的去雾.首先,提出了一种结合DWT、通道注意力(CA)和像素注意力(PA)的三分支结构,该结构可以对编码器每层输出特征的通道和像素进行加权处理,从而让去雾网络聚焦于车牌雾图中的有雾区域;其次,在解码器中引入“SOS”增强模块(“SOS”Block)来对解码器和下层输入的特征进行进一步融合和增强,提高去雾图像的峰值信噪比,并在U-Net编解码结构之间进行了层与层之间的连接,以此来充分利用不同网络层和尺度上的特征信息;最后,为弥补小波域和空间域之间网络表达图像信息的差异,提出了一种结合跨尺度聚合(CSA)的多尺度残差增强模块(CSAE Block),在空间域上进一步丰富网络对于图像细节信息的表达,有效地提高去雾图像的质量.1去雾网络结构本文去雾网络结构如图1所示.该网络主要分为A与B这2大模块,前者在小波域中实现对车牌雾图x LPHaze的去雾,后者在空间域上对模块A输出的无雾图像进行进一步优化,模块A 的网络结构参数见表1.整个网络结构的输出为:y LPDhaze=y B(y A(x LPHaze;θA);θB)(1)式中:y B(⋅)和y A(⋅)分别为模块A和B的输出,θA 和θB分别表示模块A和B的可学习参数.1.1小波U-Net二维离散小波变换(2D-DWT)可以实现对给定的图像I的小波域分解,分解过程可视为将图像I与4个滤波器进行卷积,即1个低通滤波器f LL和3个高通滤波器(f LH、f HL和f HH),这4个滤波器(即卷积核)分别由低通滤波器f L和高通滤波器f H构成.以Haar小波为例,该卷积核表示为:f L=12[]1,1T,f H=12[]1,-1Tf LL=LL T,f HL=HL T,f LH=LH T,f HH=HH T(2)125湖南大学学报(自然科学版)2022年图1去雾网络结构Fig.1Defogging network structure 表1模块A 网络结构参数Tab.1Network structure parameters of module A网络层层1层2层3层4类型注意力块卷积层残差组注意力块(下、上采样)卷积层残差组注意力块(下、上采样)卷积层残差组注意力块(下、上采样)卷积层残差组卷积层编码器(卷积核大小f ×f ,输出通道c )éëêêùûúú()2×2,1()1×1,4and ()1×1,16(3×3,16)éëêêùûúú()3×3,16()3×3,16×3éëêêùûúú()2×2,1()1×1,64(3×3,64)éëêêùûúú()3×3,64()3×3,64×3éëêêùûúú()2×2,1()1×1,256(3×3,256)éëêêùûúú()3×3,256()3×3,256×3éëêêùûúú()2×2,1()1×1,1024(3×3,1024)éëêêùûúú()3×3,1024()3×3,1024×3(3×3,1024)输出大小(宽W ,高H )(64,32)(64,32)(64,32)(32,16)(32,16)(32,16)(16,8)(16,8)(16,8)(8,4)(8,4)(8,4)(8,4)解码器(卷积核大小f ×f ,输出通道c )—éëêêùûúú()3×3,16()3×3,12éëêêùûúú()3×3,16()3×3,16×3—(3×3,64)éëêêùûúú()3×3,64()3×3,64×3—(3×3,256)éëêêùûúú()3×3,256()3×3,256×3————输出大小(宽W ,高H )—(64,32)(64,32)—(32,16)(32,16)—(16,8)(16,8)————层2层4层1层3层1层2层3层4离散小波变换DWT 卷积层ConvLayer 注意力块Attention Block “SOS ”增强块“SOS ”Block 残差组ResGroup 离散小波逆变换IDWT 跨尺度聚合增强块CSAE BlockTanh 层模块B模块A 层间多尺度聚合126第6期陈炳权等:基于深度多级小波U-Net 的车牌雾图去雾算法因此,2D-DWT 可以通过将输入图像I 与4个滤波器进行卷积和下采样来实现,从而获得4个子带图像I LL 、I LH 、I HL 和I HH .其操作定义如下:I LL =()f LL ∗I ↓2I LH =()f LH ∗I ↓2I H L=()f HL∗I ↓2I HH=()f HH∗I ↓2(3)其中:∗表示卷积操作;↓2表示尺度因子为2的标准下采样操作.低通滤波器用于捕获图像中光滑的平面和纹理信息,其它3个高通滤波器则提取图像中存在的水平、垂直和对角线方向上的边缘信息.同时,由于2D-DWT 的双正交性质,可以通过二维逆DWT 的精确重建出原始图像.2D-DWT 及其逆变换的分解和重建示意图如图2所示.本文将2D-DWT 及其逆变换嵌入到U-Net 网络结构中,改善原始U-Net 网络的结构.首先,对输入的3通道车牌雾图进行离散小波变换处理,输出图像的通道数变为原来的4倍,图像大小变为原来的12;然后,使用一个单独的卷积层(“3×3卷积+Lea⁃kyReLU ”)将输入图像扩展为16通道的图像;最后,在U-Net 的每层中迭代使用卷积层和离散小波变换用于提取多尺度边缘特征.1.2基于2D-DWT 的通道-像素联合注意力块(DCPA Block )在去雾网络中平等对待不同的通道和像素特征,对于处理非均匀雾度图像是不利的.为了能灵活处理不同类型的特征信息,Qin 等[17]和Wu 等[18]均采用CA 和PA ,前者主要用于对不同通道特征进行加权,而后者则是对具有不同雾度的图像像素进行加权,从而使网络更关注雾度浓厚的像素和高频区域.引入Hao-Hsiang Yang 等[13]的小波通道注意力块,本文提出了一种基于二维DWT 的通道-像素联合注意力模块,将DWT 、CA 和PA 构建并行的三分支结构,如图3所示.2D-DWT卷积3×3平均池化卷积Leaky ReluLeaky Relu 输入逐元素相乘残差组输出逐元素相加Leaky Relu 1×1卷积2×2Sigmoid 激活函数注意力块图3基于二维DWT 的特征融合注意力模块结构Fig.3Attention module structure of feature fusion basedon two-dimensional DWT其中,两分支结构的注意力块结合了PA (上分支)和CA (下分支)的特点,将具有通道数为C ,高和宽分别为H 、W 的特征图x ∈R C ×H ×W 分别输入到CA 和PA 中,前者通过平均池化将C×H×W 的空间信息转换为C×1×1的通道权重信息,而后者则通过卷积来将C×H×W 的图像转换成1×H×W.CA 由一个平均池化层、一个卷积层和一个LeakyReLU 层构成,其输出为:y CA =LeakyReLU 0.2(Conv 11(AvgPool (x)))(4)式中:y CA ∈R 1×H ×W ;Conv j i (⋅)表示卷积核大小为i ×i 、步长为j 的卷积操作;LeakyReLU 0.2(⋅)表示参数为0.2的LeakyReLU 激活函数;AvgPool (⋅)表示平均池化操作.类似地,PA 有一个卷积层和一个LeakyReLU层,但没有平均池化层,其输出为:y PA =LeakyReLU 0.2(Conv 22(x))(5)式中:y PA ∈R C ×1×1.CA 和PA 通过逐像素相加,并共用一个Sigmoid 激活函数来分别为输入图像通道和像素配置相应的权重参数,其输出为:y A =Sigmoid (y PA ⊕y CA)(6)式中:y A ∈R C ×H ×W ;⊕表示逐元素相加;Sigmoid (⋅)表示Sigmoid 激活函数.最后,和经离散小波变换、卷列行LLLI LII LH I HL HH22222222列I HL I LL I HH222HL H I H2L行HII LH 图22D-DWT 及其逆变换Fig.22D-DWT and its inverse transformation127湖南大学学报(自然科学版)2022年积层和残差组处理后的特征图进行逐元素相乘,从而实现对特征图的加权,其最终输出为:y DCPA =ResGroup (LeakyReLU 0.2(Conv 13(DWT (x))))⊗yA(7)式中:y DCPA ∈R C ×H ×W ;DWT (⋅)为离散小波变换;⊗表示逐元素相乘;ResGroup (⋅)表示残差组函数. 1.3层间多尺度聚合(LMSA )受到Park 等[19]在图像去雾任务中采用多级连接来复原图像细节信息的启示,将U-Net 编码器中前3层中DCPA Block 的输出进行跨层和跨尺度的特征聚合,使网络能充分利用图像潜在的特征信息,其结构如图4所示.假设编码器的第l 层输出的聚合特征为y lconcat ,输入解码器的第l 层特征为D l in ,其中l =1,2,3,则y lconcat =Cat((Cat i =13F l i (y l DCPA )),F up (D l +1out ))(8)D l in =LeakyReLU 0.2(Conv 11(LeakyReLU 0.2(y l SEBlock (y l concat))))(9)式中:Cat (⋅)表示级联操作;F l i (⋅)表示从第i 层到第l 层的采样操作;F up (⋅)表示上采样操作;D i +1out为解码器的第i +1层的输出.将每层聚合后的特征图x l concat 输入到SEBlock 中,自适应地调节各个通道特征,其输出为:y lSEBlock (x l concat )=Sigmoid (FC (ReLu (FC (AvgPool (xlconcat)))))(10)式中:FC (⋅)表示全连接层函数;ReLU (⋅)为ReLU 非线性激活函数.SEBlock 的结构如图5所示.平均池化全连接层全连接层ReLuSigmoid 激活函数S图5SEBlock 结构Fig.5SEBlock structure通过“LeakyRelu-Conv-LeakyRelu ”操作减少每层输出特征的通道数,输入到U-Net 解码器中前3层的“SOS ”Block 中,提升重构图像的峰值信噪比.U-Net 网络中的第4层则聚合前2层的DCPABlock 输出特征和第3层的DWT 输出特征,同样经过SEBlock 和“LeakyRelu-Conv-LeakyRelu ”操作后作为第4层的输入特征进行后续操作.其数学表达式为:y 4concat =Cat((Cat i =12F 4i (y 4DCPA )),E 3out )(11)D 4in =LeakyReLU 0.2(Conv 11(LeakyReLU 0.2(y 4SEBlock (y 4concat))))(12)其中,E 3out 表示解码器第3层的输出.1.4“SOS ”增强模块(“SOS ”Block )从Romano 等[20]和Dong 等[21]对“Strengthen-Operate-Subtract ”增强策略(“SOS ”)的开发和利用中可知,该增强算法能对输入的图像特征进行细化处理,可以提高输出图像的峰值信噪比.因此,在本文的车牌图像去雾网络解码器结构中,直接将Dong 等[21]采用的“SOS ”增强算法嵌入到U-Net 结构中,提升车牌去雾图像的质量.Dong 等[21]所采用的“SOS ”增强算法的近似数学表达式如下:J n +1=g (I +J n )-J n(13)层1DCPA Block输出层2DCPA Block输出层3DCPA Block输出编码器CCC层1“SOS ”Block层2“SOS ”Block层3“SOS ”Block解码器LeakyReLU-1×1Conv-LeakyReLU SEBlocky 2CSACaty 1coocat y 3CSACat y 2CSAEBlocky 1CSAEBlock y 3CSAEBlockD 2inD 1inD 3in图4层间多尺度聚合结构Fig.4Multi-scale aggregation structure128第6期陈炳权等:基于深度多级小波U-Net 的车牌雾图去雾算法其中:I 为输入雾图像;J n 为第n 层估计的去雾图像;I +J n 表示使用输入雾图进行增强的图像;g (⋅)表示去雾方法或者优化方法.在U-Net 中编解码器之间的嵌入方式如下:将U-Net 编解码器之间的连接方式改为了逐元素相加,即编码器第i 层输出的聚合特征D i in 加上对应的解码器的第i 层输入特征D i +1out(经上采样操作得到与D i in 相同的图片大小);将逐元素相加后的输出接入到优化单元(即残差组)中进行进一步的特征细化,随后减去解码器的第i 层输入D i +1out .通过上述嵌入方式,模块输出为:y i sos =g i (D i in +(D i +1out )↑2)-(D i +1out )↑2(14)其中:↑2表示尺度因子为2的上采样操作.其与U-Net 相结合的结构示意图如图6所示.解码器的第i +1层输出编码器的第i 层输出逐元素相减优化单元g (·)逐元素相加2D DWT2D IDWT图6“SOS ”深度增强模块Fig.6"SOS"depth enhancement module1.5跨尺度聚合增强模块(CSAE Block )为了弥补小波域中去雾网络所忽略的精细空间域图像特征信息,本文提出了一种基于残差组的跨尺度聚合增强模块(CSAE Block ),对小波域网络(模块A )最后输出的重构图像进行空间域上的图像细节特征补充.CSAE Block 结构如图7所示.CSAE Block 主要由卷积层(即“3×3卷积-Lea⁃kyReLU ”)、残差组、平均池化、CSA 和级联操作构成.首先,卷积层和残差组负责对模块A 输出的空间域图像y 模块A 进行特征提取,平均池化将输入特征分解为4个不同尺度(S 1=14,S 2=18,S 3=116和S 4=132)的输出,即:y S 1,y S 2,y S 3,y S 4=AvgPool (ResGroup (Conv 13(y 模块A)))(15)然后,CSA 实现对输入的不同尺度、空间分辨率的特征信息进行聚合,从而达到在所有尺度级别上有用信息的融合,并在每个分辨率级别上生成精细特征;最后,通过“LeakyRelu-Conv-LeakyRelu ”操作来对输入特征的通道数进行调整.该模块可以通过聚合不同尺度之间、不同分辨率之间的特征来使去雾网络获得较强的上下文信息处理能力.该聚合操作可表示如下:y SjCSA =⊕S i∈{}1,2,3,4F S j S i(y Si)(16)式中:y S jCSA 表示第j 个尺度S j 的CSA 输出特征,j =1,2,3,4;F S j Si(⋅)表示将尺度为S i 的特征图采样到尺度为S j 的特征图.同时,在该模块中引入短连接以改y 模块A1/161/321/81/4卷积层残差组平均池化跨尺度聚合(CSA )y ResGroupy S 2CSAy S 3CSAy S 4CSAy S 1CSA逐元素相加LeakyReLU-1×1Conv-LeakyReLU-1×1Conv-LeakyReLU-UpSample 3×3Conv-y CSACat级联Cy CSAEBlock图7CSAE Block 结构Fig.7CSAE block129湖南大学学报(自然科学版)2022年善其梯度流.综上所述,CSAE Block 总的输出表达式为:ìíîïïïïy CSACat =Cat j =14()F up ()LeakyReLU 0.2()Conv 11()y S jCSAy CSAE Block =Conv 13()Cat ()y CSACat ,y ResGroup (17)其中y CSACat 表示对上采样为统一大小的输出特征进行级联操作.1.6损失函数为了获得更好的去雾效果,本文使用3个损失函数(有图像去雾损失L rh 、边缘损失L edge 以及对比度增强损失L ce )作为网络训练的总损失L total ,即:L total =αL rh +γL edge -λL ce(18)其中:α,γ和λ均为任意非负常数.1)图像去雾损失函数.本文将L 1损失和L 2损失进行简单结合,构成车牌图像去雾损失函数:L rh =1N ∑i =1N ()I i gt -F Net ()I i haze 1+I i gt -F Net ()I ihaze 2(19)式中:N 表示输入图像像素数;I gt 为干净图像;I haze 为车牌雾图;F Net (⋅)表示车牌去雾网络函数.一方面通过L 1损失函数来获得较高的PSNR 和SSIM 值,另一方面则通过L 2损失函数来尽可能提高去雾图像的保真度.2)边缘损失函数.为了加强输出去雾图像的边缘轮廓信息,本文利用Sobel 边缘检测算法来获得车牌去雾图像和干净图像的边缘轮廓图,分别为E FNet()I haze和E I gt,计算两者的L 1范数,获得边缘损失函数:L edge=E FNet()I haze-E I gt1(20)3)对比度增强损失.为了提高车牌去雾图像的颜色对比度,本文最大限度地提升每个单独颜色通道的方差,即最大化如下表达式:L ce=(21)式中:x 表示图像的像素索引;FˉNet (I haze )为去雾网络输出图像F Net (I haze )的平均像素值.值得注意的是,所期望的输出去雾图像应该增强其对比度,所以L ce 需要最大化,因此在总损失L total 中应减去该项.2训练与测试2.1车牌雾图数据集(LPHaze Dataset )的制作为了解决车牌去雾网络训练过程中缺失的车牌雾图数据集问题,受RESIDE 数据集制作方法的启示,本文采用成熟的ASM 理论来进行车牌雾图数据集的制作.车牌图像数据主要来源于OpenITS 提供的OpenData V3.1-SYSU 功能性能车牌图像数据库,并以中科大开源数据集CCPD [22]作为补充,具体制作方法如下:1)预处理.从OpenITS 和CCPD 数据集中随机选取2291张清晰图像,并对这些清晰车牌图像的车牌区域进行截取;2)配置大气散射模型参数值.参照RESIDE 数据集所选取的参数值范围,随机选取如下一组大气光值A =[0.6,0.7,0.8,0.9,1.0]和一组大气散射系数值β=[0.4,0.6,0.8,1.0,1.2,1.4,1.6],并将场景深度d (x )置为1;3)合成车牌有雾-无雾图像对.采取一张清晰车牌图像对应多张车牌雾图的方法来合成图像对,即根据大气散射模型,结合步骤2中选定的参数值,以一张车牌无雾图像对应35张有雾图像的方法来合成数据集.合成车牌雾图示例如图8所示.(a )原图(b )(A =0.6,β=0.4)(c )(A =0.7,β=0.8)(d )(A =0.8,β=1.2)(e )(A =1.0,β=1.6)图8合成车牌雾图示例Fig.8Example of fog map of composite license plate4)划分训练集和验证集.训练集中干净车牌图像共1697张,对应的车牌雾图共59395张;验证集中干净图像共594张,对应车牌雾图共20790张.2.2实验设置本文采用自制的车牌雾图数据集(LPHaze Data⁃130第6期陈炳权等:基于深度多级小波U-Net 的车牌雾图去雾算法set )作为车牌图像去雾网络的训练和验证数据,其中所有图像像素大小均设置为64×128×3,batch size 为64.并对训练数据进行数据增强操作:随机水平翻转和随机垂直翻转(翻转概率随机取值0或1),以提升网络的鲁棒性.此外,在训练过程中,使用Adam 优化器来优化网络,其参数均采用默认值(β1=0.9和β2=0.999),并通过梯度裁剪策略加速网络收敛,训练800个epoch ,初始学习率为1e -4,总损失函数中α=1、γ=0.1和λ=0.01.采用Pytorch 包进行车牌雾图去雾网络结构代码的编写和训练,整个训练过程均在NVIDIA Tesla T4的显卡上运行.实验主要包括两个部分:其一,测试本文提出的车牌雾图去雾网络模型,其二,对其进行消融实验.上述实验在合成车牌雾图和自然拍摄的车牌雾图上进行测试,所有测试图像均随机选自OpenITS 提供的车牌图像数据库(与LPHaze Dataset 训练集中的数据不重合),并从测试结果中选取如下5种组合类型进行定性和定量分析,分别为(A =0.6,β=0.8)、(A =0.7,β=1.0)、(A =0.8,β=1.2)、(A =0.9,β=1.4)和(A =1.0,β=1.6),同时对其依次编号为组合A 到E.3结果与分析3.1测试实验1)合成车牌雾图去雾结果为了进一步评估算法性能,将本文算法与最近出现的经典去雾算法(基于引导滤波器的暗通道先验算法[4](GFDCP )、基于深度学习的端到端的去雾网络[8](DehazeNet )、端到端的一体化去雾网络(AODNet )、端到端门控上下文聚合去雾网络[23](GCANet )和端到端特征融合注意力去雾网络[17](FFANet ))进行比较.以上算法统一在LPHaze Data⁃set 的验证集上进行测试,并选取其中5类合成车牌雾图的测试结果进行实验分析,其结果见表2.由表2可以看出,在5类不同大气光和散射系数的合成车牌雾图上,与GCANet 得到的结果相比,在PSNR 均值上分别提高了5.64、6.74、8.84、10.52、11.88dB ,SSIM 均值上则分别提高了0.0368、0.0599、0.0991、0.1496、0.2225.同时,在图9中的PSNR 和24222018161412108P S N R (d B )组合A组合B组合C组合D组合EGFDCPDehazeNet AODNet GCANet FFANet 本文算法组合类型(a )6种算法在5类组合上的PSNR 均值曲线GFDCP DehazeNet AODNet GCANet FFANet 本文算法1.00.90.80.70.60.5S S I M组合A组合B组合C组合D组合E组合类型(b )6种算法在5类组合上的SSIM 均值曲线图96种算法在5类合成车牌雾图上的PSNR 和SSIM 均值曲线Fig.9PSNR and SSIM mean curves of 6algorithms on5types of composite license plate fog map表2合成车牌雾图去雾图像的PSNR (dB )/SSIM 均值Tab.2PSNR (dB )/SSIM mean of defogging image of composite license plate fog image组合类型(A =0.6,β=0.8)(A =0.7,β=1.0)(A =0.8,β=1.2)(A =0.9,β=1.4)(A =1.0,β=1.6)GFDCP20.75/0.946119.23/0.924817.85/0.900715.63/0.861612.70/0.8035DehazeNet19.31/0.895216.92/0.846014.20/0.793611.71/0.74509.57/0.6882AODNet13.79/0.775715.12/0.801314.60/0.745211.64/0.64818.01/0.5349GCANet18.86/0.925516.31/0.890613.82/0.845911.92/0.791310.14/0.7091FFANet18.09/0.894718.65/0.878419.31/0.851212.76/0.71678.61/0.5407本文算法24.50/0.962323.05/0.950522.66/0.945022.44/0.940922.02/0.9316131湖南大学学报(自然科学版)2022年SSIM 均值曲线图中亦可知,在重构图像质量方面,本文算法在处理不同雾度的合成车牌雾图上明显优于上述5类经典算法.最后,从合成车牌雾图的去雾图像中选取部分图片进行效果展示,如图10所示.从去雾效果中可以直观感受到,本文算法相较于其它算法而言,具有较少的雾度残留以及颜色失真.2)自然车牌雾图去雾结果本文还对实际拍摄的自然车牌雾图进行测试,并与上述5种经典算法的去雾效果进行视觉比较.该测试数据选自OpenITS 的车牌图像数据库,共915张实际拍摄的车牌雾图,视觉对比结果如图11所示.从图11可知:在处理常见的蓝底车牌雾图时,本文算法很少出现过度曝光和图像整体偏暗的问题,且雾度残留也很少;对于其它底色的车牌雾图(如图11中的黄底和蓝底车牌),本文算法在去雾效果上相较于上述5种经典算法仍能保持自身优势,并且在颜色、字符等图像信息上也能得到较好的恢复.(a )(A =0.6,β=0.8)(b )(A =0.7,β=1.0)(c )(A =0.8,β=1.2)(d )(A =0.9,β=1.4)(e )(A =1.0,β=1.6)合成雾图GFDCPDehazeNetAODNetGCANetFFANet本文算法干净图像图10合成车牌雾图去雾效果展示Fig.10Fog removal effect display of composite license plate图11实际拍摄的车牌雾图去雾效果展示比较Fig.11Comparison of defogging effect of actual license plate fog map自然车牌雾图GFDCP DehazeNet AODNet GCANet FFANet 本文算法132第6期陈炳权等:基于深度多级小波U-Net的车牌雾图去雾算法3.2不同模块对网络性能的影响为了分析其中各个模块的重要性,本文在LP⁃Haze Dataset数据集上进行消融研究分析,以基于ResGroup和“SOS”Block的MWCNN去雾网络作为基准网络模块,对于其他不同的网络模块,其简化形式及说明如下,R1:基于ResGroup和“SOS”Block的MWCNN作为基准网络,该网络不包含DCPA Block、LMSA和CSAE Block;R2:具有DCPA Block的基准网络;R3:具有DCPA Block、LMSA和CSAE Block的基准网络,即最终的车牌雾图去雾网络.上述网络模块均只训练150个epoch,且初始学习率均为1e-4,并在LPHaze Dataset的验证集上进行测试,其测试结果如表3所示.表3不同网络模块在LPHaze Dataset的验证集上测试结果的均值Tab.3Mean value of test results of different networkmodules on the verification set of LPHaze Dataset网络R1 R2 R3“SOS”Block√√√DCPABlock√√LMSA√CSAEBlock√PSNR/dB22.4722.4323.27SSIM0.94210.94320.9513由表3可得,在不加入DCPA Block、LMSA和CSAE Block的情形下,PSNR和SSIM的均值分别可以达到22.47dB和0.9421,而在加入三者后,PSNR 和SSIM均值则分别提升了0.8dB和0.0092,从而使网络能重建出高质量的去雾图像.3.3不同损失函数对网络性能的影响为了分析损失函数的有效性,本文算法分别采用L1、L2、L rh(即L1和L2损失的简单结合)和L total这四类损失函数来进行网络模型的训练,训练150个ep⁃och,且初始学习率为1e-4.分别在LPHaze Dataset的验证集上进行PSNR和SSIM的指标测试,其实验结果如表4所示.从表4可知,只使用L rh损失函数时,表4不同损失函数下车牌去雾网络测试结果Tab.4Test results of license plate defogging networkunder different loss functions损失函数L1L2L rhL total PSNR/dB22.7422.1923.0623.27SSIM0.94170.93710.94710.9513平均PSNR和SSIM可达到23.06dB和0.9471,且相较于单独使用L1或L2时均有着明显提升.而使用总损失函数L total时,平均PSNR和SSIM分别提升了0.21dB和0.0042,从而使网络性能得到较大的改善.4结论本文提出了一种基于深度多级小波U-Net的车牌雾图去雾算法,该算法以MWCNN作为去雾网络主体框架.首先,为了在小波域和空间域中尽可能地整合不同层级和尺度的图像特征,引入了“SOS”增强策略,并在MWCNN中间进行跨层连接,以此对图像特征进行整合、完善和优化;其次,本文将像素注意力、通道注意力和离散小波变换进行有效融合,从而尽可能去除车牌雾图中的雾度;最后,通过跨尺度聚合增强模块来弥补小波域和空间域之间存在的图像信息差异,进一步提高了重构图像质量.自然车牌雾图和LPHaze Dataset的验证集上的实验结果表明,在处理具有不同大气光照和雾度的车牌雾图上,本文算法具有较好的去雾表现,并且在处理具有不同底色的车牌雾图时具有一定的优势.参考文献[1]YADAV G,MAHESHWARI S,AGARWAL A.Foggy image en⁃hancement using contrast limited adaptive histogram equalizationof digitally filtered image:performance improvement[C]//2014In⁃ternational Conference on Advances in Computing,Communica⁃tions and Informatics(ICACCI).September24-27,2014,Delhi,India.IEEE,2014:2225-2231.[2]RUSSO F.An image enhancement technique combining sharpen⁃ing and noise reduction[J].IEEE Transactions on Instrumenta⁃tion and Measurement,2002,51(4):824-828.[3]GALDRAN A,BRIA A,ALVAREZ-GILA A,et al.On the dual⁃ity between retinex and image dehazing[C]//2018IEEE/CVF Con⁃ference on Computer Vision and Pattern Recognition.June18-23,2018,Salt Lake City,UT,USA.IEEE,2018:8212-8221.[4]HE K,SUN J,TANG X.Guided image filtering[C]//DANIILIDISK,MARAGOS P,PARAGIOS puter Vision-ECCV2010,11th European Conference on Computer Vision,Herak⁃lion,Crete,Greece,September5-11,2010,Proceedings,Part I.Springer,2010,6311:1–14.[5]HE K M,SUN J,TANG X O.Single image haze removal usingdark channel prior[C]//IEEE Transactions on Pattern Analysisand Machine Intelligence.IEEE,:2341-2353.[6]ZHU Q S,MAI J M,SHAO L.A fast single image haze removal133。
文章标题:探究metlab基于暗原色先验的去雾原理1. 前言在当今图像处理领域,去雾技术一直是一个备受关注的研究方向。
随着人工智能技术的不断发展,metlab基于暗原色先验的去雾原理成为了近年来研究的热点之一。
本文将从深度和广度的角度对该原理进行全面评估,并撰写一篇有价值的文章,以便读者更深入地理解这一技术。
2. 什么是metlab基于暗原色先验的去雾原理我们来了解一下metlab基于暗原色先验的去雾原理是什么。
metlab是一种常用的数学软件,而暗原色先验是指在图像处理中,暗色物体在远处看起来更暗。
基于这一先验,metlab技术通过对图像进行数学建模和计算,利用图像中的暗通道先验来去除雾霾,提高图像的清晰度和质量。
3. 深度探讨metlab基于暗原色先验的去雾原理3.1 模型建立在metlab技术中,首先需要建立一个准确的数学模型来描述图像的暗通道先验。
通过分析图像的亮度、对比度、饱和度等特征,将图像进行数学建模,找到图像中暗通道的先验信息。
3.2 算法实现接下来,需要将数学模型转化为metlab算法实现。
这一过程涉及到对图像进行滤波、特征提取等操作,以便准确地获取图像的暗通道信息,并去除雾霾。
3.3 效果评估需要对去雾后的图像进行效果评估,比较去雾前后的图像质量,验证metlab基于暗原色先验的去雾原理的有效性和稳定性。
4. 广度探讨metlab基于暗原色先验的去雾原理4.1 应用领域metlab基于暗原色先验的去雾原理不仅可以应用于摄影、视频处理等领域,还可以在自动驾驶、安防监控等领域发挥重要作用。
4.2 技术局限与此我们也需要关注metlab技术的局限性,比如在特定场景下的去雾效果不佳、算法复杂度较高等问题。
5. 总结与展望通过深度和广度的探讨,我们对metlab基于暗原色先验的去雾原理有了更全面的了解。
在未来的研究中,可以进一步探索该原理在不同场景下的适用性,优化算法性能,以及提高去雾效果的稳定性和准确性。
aod去雾算法原理
AOD(AtmosphericOpticalDepth)去雾算法是一种常用的图像去
雾方法,其原理是利用大气光学模型,对图像进行透射率估计和退化恢复操作。
该算法主要分为以下几个步骤:
1. 估计大气光照度:首先需要根据图像的亮度信息来估计出大气光照度,这个值表示了在没有雾气的情况下,图像中最亮的部分的亮度值。
2. 估计透射率:通过估计图像中每个像素点与大气光照度之间的透射率,可以得到图像被雾气所遮盖的程度。
这个过程可以通过计算像素点颜色值与估计的大气光照度之间的比值得到。
3. 透射率修正:由于图像中不同区域的雾气密度不同,因此需要对估计出的透射率进行修正。
一种常用的方法是使用像素点间的差异来计算修正系数,并将其应用到透射率中。
4. 退化恢复:根据估计出的透射率和大气光照度,可以对图像进行退化恢复操作,去除图像中的雾气。
该算法可以在大气光学模型基础上对图像进行较好的去雾处理,但仍有一些缺陷,如对于复杂纹理或颜色变化剧烈的图像处理效果较差。
因此,针对不同类型的图像,需要选择合适的去雾算法进行处理。
- 1 -。
去雾算法快速引言在计算机视觉和图像处理领域,去雾算法是一个重要的研究方向。
去雾算法可以通过对图像中的雾霾进行分析和处理,使图像呈现真实的景物细节和颜色。
本文将介绍一种快速去雾算法,并详细讨论其原理和实现方式。
一、快速去雾算法原理快速去雾算法主要基于以下原理:1) 雾霾图像中的像素值与距离成正相关;2) 雾霾导致图像亮度下降,颜色偏差等现象。
根据这些原理,可以通过对图像进行处理来去除雾霾。
1. 像素值与距离的关系在雾霾图像中,像素值与物体与相机的距离成正相关。
这是因为光线在空气中传播时会发生散射,导致远处物体的亮度变暗。
因此,可以通过对每个像素值进行修正来恢复图像的真实亮度。
2. 亮度下降和颜色偏差雾霾会导致图像的亮度下降和颜色偏差。
这是因为雾霾粒子会散射特定波长的光线,使得图像中的颜色失真。
为了恢复图像的真实颜色,可以对图像进行颜色修正。
二、快速去雾算法实现方式快速去雾算法可以通过以下步骤来实现:1. 雾霾图像预处理首先,需要对输入的雾霾图像进行预处理。
这包括图像的去噪和对比度增强等操作。
这些预处理步骤可以提高去雾算法的效果。
2. 估计雾霾密度图下一步是估计雾霾密度图。
雾霾密度图反映了图像中每个像素受雾霾影响的程度。
可以使用暗通道先验方法或者基于颜色空间的方法来估计雾霾密度图。
3. 修正图像的亮度和对比度根据估计得到的雾霾密度图,可以对图像的亮度和对比度进行修正。
修正过程中,需要考虑物体与相机的距离,以及雾霾密度的影响。
4. 修正图像的颜色最后,可以对图像的颜色进行修正。
通过根据雾霾密度图对图像的颜色通道进行加权,可以恢复图像的真实颜色。
三、性能评估与优化为了评估快速去雾算法的性能,可以使用多个指标进行测量。
常用的指标包括去雾效果的主观评价和客观评价,如图像的对比度、边缘保留和颜色保真度等。
为了进一步提高算法的性能,可以考虑以下优化策略:1. 并行计算可以利用并行计算的技术,如GPU加速和多线程处理,来加快算法的运行速度。
aod去雾算法原理
AOD(Atmospheric Optical Depth)去雾算法是一种常见的图像
去雾方法,其原理基于大气光学模型和图像退化模型。
在自然环境中,由于大气散射和吸收作用,图像中物体的颜色和亮度会受到影响,呈
现出模糊、低对比度、色彩暗淡等现象。
AOD去雾算法通过估计大气光学深度来消除这种影响,使得图像更加清晰、鲜明。
AOD去雾算法的核心思想是利用大气光学模型推断出未受影响的
透射率和散射率,从而恢复出原图像。
根据大气光学模型,通过光线
传播公式可以得到到达观察者的光线经过大气后的衰减量,即大气光
学深度。
AOD去雾算法通过测量被拍摄物体与不同距离的大气中白色物体亮度之间的变化,就可以求出大气光学深度,进一步推断出散射率
和透射率。
具体地说,在AOD去雾算法中,首先需要对原图像进行预处理,
去除图像中的噪声和背景干扰等。
然后,通过估计图像中具有高对比
度且不受到大气散射影响的区域,即白色物体,来计算大气光学深度。
对于每个像素,可以根据大气光学模型计算出透射率,然后根据图像
退化模型对图像进行去雾处理,即用透射率对原图像进行补偿。
最后,为了保证图像中亮度和对比度的一致性,可以进行后期调整处理。
总的来说,AOD去雾算法的核心原理是基于大气光学和图像退化
模型,利用大气光学深度推断出图像的散射率和透射率,从而恢复出
原始图像。
该算法尤其适用于户外场景拍摄的照片去雾处理,可以显
著提高图像质量和视觉效果。