自动控制原理-第1章-自动控制的一般概念
- 格式:ppt
- 大小:8.02 MB
- 文档页数:87
自动控制系统复试问题汇总第一章自动控制的一般概念闭环(反馈)控制系统:是指控制器与被控对象之间既有顺向作用又有反溃作用的的控制系统。
它是按照偏差进行控制,控制精度较高,但系统所使用的元件较多,结构复杂,系统的性能分析和设计比较麻烦。
实质是利用反馈的作用减小误差。
开环控制系统;是指输出量(被控量)对系统的控制作用无任何影响的控制系统。
没有自动修正偏差的能力,抗扰动性较差,但结构简单,调整方便。
反馈控制系统的组成:组成控制系统的元件有给定元件(给定电压的电位计等),放大元件(电压放大器、功率放大器等),执行元件(阀、电动机等),被控元件,测量元件(传感器、测速发电机等),比较元件(差动放大器等),校正元件也叫补偿元件(有源网络等)。
控制:是指为了克服干扰的影响,达到期望的目标而对被控对象的某一个(或一些)物理量进行的操作。
控制器/校正装置:对偏差进行处理,代替人完成控制的自动控制装置,产生控制作用的装置。
自动控制:在无人参与的情况下,控制器使被控对象按预定规律运行的过程。
自动控制系统:控制器和被控对象按一定方式连接起来完成某种控制任务的有机整体。
自动控制的工作原理:通过测量获取偏差,由偏差产生控制作用,控制作用使得偏差减小或消除,是被控量趋于要求值。
比较元件:将检测元件提供的输出值和给定装置的定值进行比较获得偏差。
检测元件:测量被控量并反馈到输入端。
执行机构:接收控制作用并对控制对象施加控制作用。
反馈信号:由系统输出端取出并反向送回系统输入端的信号误差信号:被控量期望值与实际值之差。
偏差信号:输入信号与主反馈信号之差。
扰动信号:与控制作用相反,使被控量偏离期望值。
线性连续控制系统:按输入变量的变化规律不同可分为恒值控制系统、随动控制系统、程序控制系统。
恒值控制系统:输入信号是一个恒定不变的常数,要求是被控量稳定在期望值附近,问题是存在使被控量偏离期望值的扰动,任务是增强系统的抗干扰能力,扰动作用于系统时使得被控量尽快恢复到期望值。

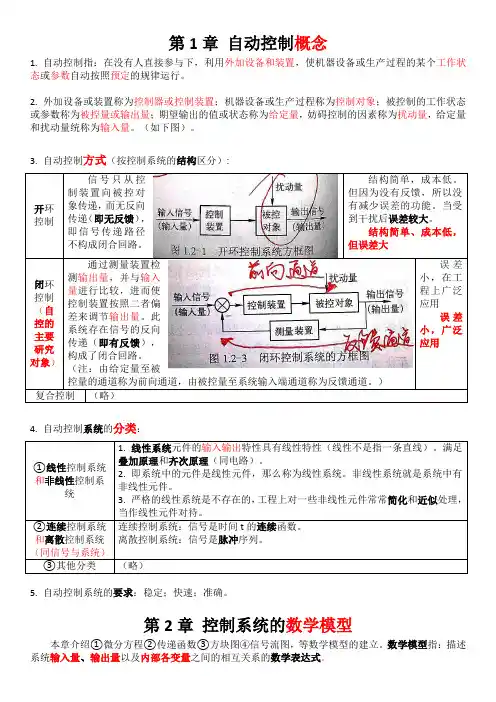
第1章自动控制概念1.自动控制指:在没有人直接参与下,利用外加设备和装置,使机器设备或生产过程的某个工作状态或参数自动按照预定的规律运行。
2.外加设备或装置称为控制器或控制装置;机器设备或生产过程称为控制对象;被控制的工作状态或参数称为被控量或输出量;期望输出的值或状态称为给定量,妨碍控制的因素称为扰动量,给定量和扰动量统称为输入量。
(如下图)。
3.自动控制方式(按控制系统的结构区分):开环控制信号只从控制装置向被控对象传递,而无反向传递(即无反馈),即信号传递路径不构成闭合回路。
结构简单,成本低。
但因为没有反馈,所以没有减少误差的功能。
当受到干扰后误差较大。
结构简单、成本低,但误差大闭环控制(自控的主要研究对象)通过测量装置检测输出量,并与输入量进行比较,进而使控制装置按照二者偏差来调节输出量。
此系统存在信号的反向传递(即有反馈),构成了闭合回路。
(注:由给定量至被控量的通道称为前向通道,由被控量至系统输入端通道称为反馈通道。
)误差小,在工程上广泛应用误差小,广泛应用复合控制(略)4.自动控制系统的分类:①线性控制系统和非线性控制系统1.线性系统元件的输入输出特性具有线性特性(线性不是指一条直线)。
满足叠加原理和齐次原理(同电路)。
2.即系统中的元件是线性元件,那么称为线性系统。
非线性系统就是系统中有非线性元件。
3.严格的线性系统是不存在的,工程上对一些非线性元件常常简化和近似处理,当作线性元件对待。
②连续控制系统和离散控制系统(同信号与系统)连续控制系统:信号是时间t的连续函数。
离散控制系统:信号是脉冲序列。
③其他分类(略)5.自动控制系统的要求:稳定;快速;准确。
第2章控制系统的数学模型本章介绍①微分方程②传递函数③方块图④信号流图,等数学模型的建立。
数学模型指:描述系统输入量、输出量以及内部各变量之间的相互关系的数学表达式。
微分方程反映元件输入量与输出量之间的方程,是在时域内描述系统动态过程的数学模型。
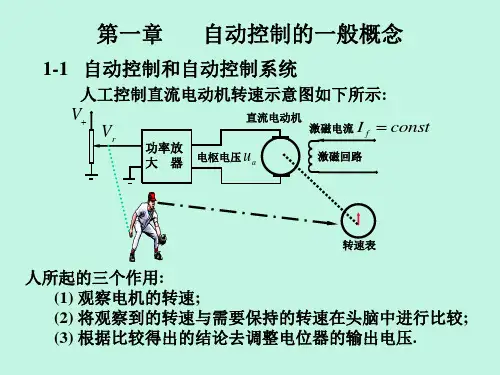
第一章自动控制的一般概念1.1 自动控制的基本原理与方式1、自动控制、系统、自动控制系统◎自动控制:是指在没有人直接参与的情况下,利用外加的设备或装置(称控制装置或控制器),使机器、设备或生产过程(统称被控对象)的某个工作状态或参数(即被控量)自动地按照预定的规律(给定值)运行。
◎系统:是指按照某些规律结合在一起的物体(元部件)的组合,它们相互作用、相互依存,并能完成一定的任务。
◎自动控制系统:能够实现自动控制的系统就可称为自动控制系统,一般由控制装置和被控对象组成。
除被控对象外的其余部分统称为控制装置,它必须具备以下三种职能部件。
•测量元件:用以测量被控量或干扰量。
•比较元件:将被控量与给定值进行比较。
•执行元件:根据比较后的偏差,产生执行作用,去操纵被控对象。
参与控制的信号来自三条通道,即给定值、干扰量、被控量。
2、自动控制原理及其要解决的基本问题◎自动控制原理:是研究自动控制共同规律的技术科学。
而不是对某一过程或对象的具体控制实现(正如微积分是一种数学工具一样)。
◎解决的基本问题:•建模:建立系统数学模型(实际问题抽象,数学描述)•分析:分析控制系统的性能(稳定性、动/稳态性能)•综合:控制系统的综合与校正——控制器设计(方案选择、设计)3、自动控制原理研究的主要内容4、室温控制系统5、控制系统的基本组成◎被控对象:在自动化领域,被控制的装置、物理系统或过程称为被控对象(室内空气)。
◎控制装置:对控制对象产生控制作用的装置,也称为控制器、控制元件、调节器等(放大器)。
◎执行元件:直接改变被控变量的元件称为执行元件(空调器)。
◎测量元件:能够将一种物理量检测出来并转化成另一种容易处理和使用的物理量的装置称为传感器或测量元件(热敏电阻)。
◎比较元件:将测量元件和给定元件给出的被控量实际值与参据量进行比较并得到偏差的元件。
◎放大元件:放大偏差信号的元件。
◎校正元件(补偿元件):结构参数便于调整的元件,用于改善系统性能。
第一章 自动控制的一般概念习题及答案1-1 根据题1-15图所示的电动机速度控制系统工作原理图,完成: (1) 将a ,b 与c ,d 用线连接成负反馈状态;(2) 画出系统方框图。
解 〔1〕负反馈连接方式为:d a ↔,c b ↔;〔2〕系统方框图如图解1-1 所示。
1-2 题1-16图是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开、闭的工作原理,并画出系统方框图。
图1-16 仓库大门自动开闭控制系统解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。
与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路到达平衡,电动机停止转动,大门到达开启位置。
反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。
系统方框图如图解1-2所示。
1-3 图1-17为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。
图1-17 炉温自动控制系统原理图解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比,c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压f u 。
f u 作为系统的反馈电压与给定电压r u 进行比较,得出偏差电压e u ,经电压放大器、功率放大器放大成a u 后,作为控制电动机的电枢电压。
在正常情况下,炉温等于某个期望值T °C ,热电偶的输出电压f u 正好等于给定电压r u 。
此时,0=-=f r e u u u ,故01==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。
这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。
第六版前言第一章自动控制的一般概念1-1 自动控制的基本原理与方式1-2 自动控制系统示例1-3 自动控制系统的分类1-4 对自动控制系统的基本要求1-5 自动控制系统的分析与设计工具习题第二章控制系统的数学模型2-1 控制系统的时域数学模型2-2 控制系统的复数域数学模型2-3 控制系统的结构图与信号流图2-4 控制系统建模实例习题第三章线性系统的时域分析法3-1 系统时间响应的性能指标3-2 一阶系统的时域分析3-3 二阶系统的时域分析3-4 高阶系统的时域分析3-5 线性系统的稳定性分析3-6 线性系统的稳态误差计算3-7 控制系统时域设计习题第四章线性系统的根轨迹法4-1 根轨迹法的基本概念4-2 根轨迹绘制的基本法则4-3 广义根轨迹4-4 系统性能的分析4-5 控制系统复域设计习题第五章线性系统的频域分析法5-1 频率特性5-2 典型环节与开环系统的频率特性5-3 频率域稳定判据5-4 稳定裕度5-5 闭环系统的频域性能指标5-6 控制系统频域设计习题第六章线性系统的校正方法6-1 系统的设计与校正问题6-2 常用校正装置及其特性6-3 串联校正6-4 前馈校正6-5 复合校正6-6 控制系统校正设计习题第七章线性离散系统的分析与校正7-1 离散系统的基本概念7-2 信号的采样与保持7-3 z变换理论7-4 离散系统的数学模型7-5 离散系统的稳定性与稳态误差7-6 离散系统的动态性能分析7-7 离散系统的数字校正7-8 离散控制系统设计习题第八章非线性控制系统分析8-1 非线性控制系统概述8-2 常见非线性特性及其对系统运动的影响8-3 相平面法8-4 描述函数法8-5 非线性控制的逆系统方法8-6 非线性控制系统设计习题第九章线性系统的状态空间分析与综合9-1 线性系统的状态空间描述9-2 线性系统的可控性与可观测性9-3 线性定常系统的反馈结构及状态观测器9-4 李雅普诺夫稳定性分析9-5 控制系统状态空间设计习题第十章动态系统的最优控制方法10-1 最优控制的一般概念10-2 最优控制中的变分法10-3 极小值原理及其应用10-4 线性二次型问题的最优控制10-5 控制系统优化设计。