新时达机器人系统说明书.
- 格式:doc
- 大小:3.49 MB
- 文档页数:69
STEP机器人操作安全手册-新时达机器人STEP 机器人操作安全手册新时达机器人一、机器人操作前的准备工作1、环境检查在操作新时达机器人之前,必须对工作环境进行全面检查。
确保工作区域整洁,无杂物堆积,地面平整且干燥,以防止滑倒和绊倒事故。
同时,要保证工作区域有足够的照明,以便操作人员能够清晰地看到机器人的动作和周围的情况。
2、机器人检查仔细检查机器人的外观,查看是否有损坏、松动的部件或线缆。
检查机器人的关节运动是否灵活,有无异常噪音或卡顿现象。
确保机器人的控制系统、传感器和执行器等部件正常工作。
3、工具和设备准备根据操作任务的需要,准备好相应的工具和设备,并确保其处于良好的工作状态。
同时,要熟悉这些工具和设备的使用方法和安全注意事项。
4、人员培训所有参与新时达机器人操作的人员,都必须经过专业的培训,了解机器人的工作原理、操作方法和安全规程。
只有通过考核并获得相关资质的人员,才能进行机器人的操作。
二、机器人操作中的安全注意事项1、保持安全距离在机器人运行过程中,操作人员必须与机器人保持足够的安全距离。
严禁靠近正在运动的机器人手臂或其他部件,以免发生碰撞和挤压事故。
2、禁止随意触摸未经授权,任何人不得随意触摸机器人的控制面板、按钮和线缆等部件。
避免因误操作导致机器人失控或发生故障。
3、注意警示标识机器人工作区域通常会设置各种警示标识,如“危险区域”、“禁止入内”等。
操作人员必须严格遵守这些标识的指示,不得擅自进入警示区域。
4、避免多人操作为了避免操作指令混乱,同一时间内只能由一名经过授权的操作人员对新时达机器人进行操作。
5、监控机器人状态在操作过程中,操作人员要时刻监控机器人的运行状态,包括运动轨迹、速度、负载等参数。
一旦发现异常情况,应立即停止机器人的运行,并进行检查和处理。
三、机器人编程与调试中的安全措施1、离线编程在进行机器人编程时,尽量采用离线编程的方式。
这样可以在不影响机器人实际运行的情况下,对程序进行编写、修改和优化,降低安全风险。
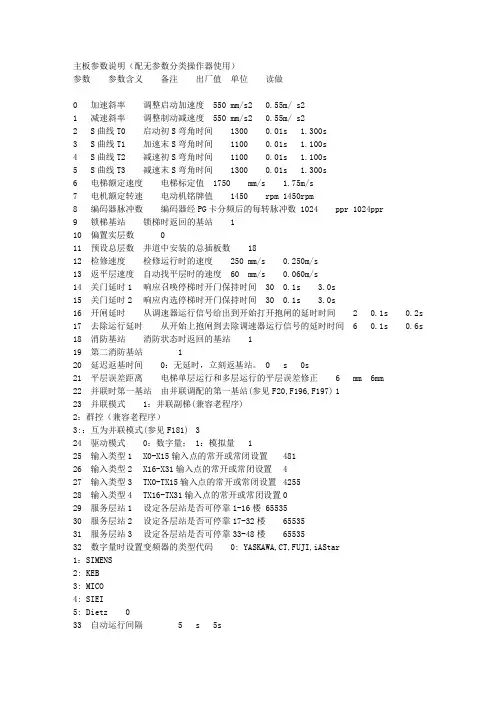
主板参数说明(配无参数分类操作器使用)参数参数含义备注出厂值单位读做0 加速斜率调整启动加速度550 mm/s2 0.55m/ s21 减速斜率调整制动减速度550 mm/s2 0.55m/ s22 S曲线T0 启动初S弯角时间1300 0.01s 1.300s3 S曲线T1 加速末S弯角时间1100 0.01s 1.100s4 S曲线T2 减速初S弯角时间1100 0.01s 1.100s5 S曲线T3 减速末S弯角时间1300 0.01s 1.300s6 电梯额定速度电梯标定值1750 mm/s 1.75m/s7 电机额定转速电动机铭牌值1450 rpm 1450rpm8 编码器脉冲数编码器经PG卡分频后的每转脉冲数 1024 ppr 1024ppr9 锁梯基站锁梯时返回的基站 110 偏置实层数011 预设总层数井道中安装的总插板数1812 检修速度检修运行时的速度250 mm/s 0.250m/s13 返平层速度自动找平层时的速度60 mm/s 0.060m/s14 关门延时1 响应召唤停梯时开门保持时间30 0.1s 3.0s15 关门延时2 响应内选停梯时开门保持时间30 0.1s 3.0s16 开闸延时从调速器运行信号给出到开始打开抱闸的延时时间 2 0.1s 0.2s17 去除运行延时从开始上抱闸到去除调速器运行信号的延时时间 6 0.1s 0.6s18 消防基站消防状态时返回的基站 119 第二消防基站 120 延迟返基时间0:无延时,立刻返基站。
0 s 0s21 平层误差距离电梯单层运行和多层运行的平层误差修正 6 mm 6mm22 并联时第一基站由并联调配的第一基站(参见F20,F196,F197) 123 并联模式1:并联副梯(兼容老程序)2:群控(兼容老程序)3::互为并联模式(参见F181) 324 驱动模式0:数字量; 1:模拟量 125 输入类型1 X0-X15输入点的常开或常闭设置48126 输入类型2 X16-X31输入点的常开或常闭设置 427 输入类型3 TX0-TX15输入点的常开或常闭设置425528 输入类型4 TX16-TX31输入点的常开或常闭设置029 服务层站1 设定各层站是否可停靠1-16楼 6553530 服务层站2 设定各层站是否可停靠17-32楼6553531 服务层站3 设定各层站是否可停靠33-48楼6553532 数字量时设置变频器的类型代码0: YASKAWA,CT,FUJI,iAStar1:SIMENS2: KEB3: MICO4: SIEI5: Dietz 033 自动运行间隔 5 s 5s34 自动运行次数035 消防模式0: 中国标准1: 苏州迅达模式(仅区别于消防时允许关门) 036 抱闸开关检测模式0:没有抱闸开关设置1:在除香港以外的其它地区使用2:在香港地区使用43 司机状态外呼蜂鸣闪烁功能选择0-无蜂鸣无闪烁(标准司机模式)1-有蜂鸣无闪烁(标准司机模式)2-无蜂鸣有闪烁(标准司机模式)3-有蜂鸣有闪烁(标准司机模式)4-允许关门待梯以上可以组合,例如:7代表有蜂鸣有闪烁并开门待梯344 串行通讯本机地址小区监控或远程监控时本梯在梯群中的地址,无监控时为255。

第八部分调试说明OH1000MRL1.OH1000MRL 控制系统概述OH1000MRL 控制系统引用了德国SCHRITT 的HCB(逻辑控制板作为电梯控制系统的核心,充分吸收了欧洲技术,将电梯的各个部件紧密的连在一起。
驱动部分则采用意大利高精度的矢量变频技术,使电梯的运行更加平稳舒适,同时其流畅简洁的外观也令人赏心悦目。
HCB内部包括四个模块子系统:OCSS操作控制子系统MCSS(运行控制子系统DCSS(门控制子系统DBSS(驱动和制动子系统1.1 下图是OH100MRL0 电梯控制系统基本框图:2. 调试操作2.1 检查控制柜打开控制柜的门,检查是否有连接处松动和元件损坏,保管好随机资料,更换已损坏的部件,紧固控制柜中所有连接处。
紧固时请特别注意电源线、动力线和制动电阻的连接。
HCB OCSS 操作控制DBSS 驱动控制DCSS 门机控制MCSS 运动控制C/C 轿相并行线C/H 厅外显示并行线NTSD EXPXRDS DOLVFBDS DCLDO2000AvyL-M 变频器5LS,6LS 端站限位开关INS,ERO 检修开关安全回路测速(2048 无齿轮电动机对重轿厢LWO 超载LWX 满载1LS,2LS 端站减速开关ULZ 、DLZ 门区信号按接线图,检查PVT线、随行电缆的临时接线、限位开关的临时接线,检查每个设备的接地线是否可靠接地。
2.3绝缘检查脱开接地线和HL的连接,拔出HCB上的所有插件,将所有的空气开关都置于“OFF位置,用绝缘表测量地线和HL、电源线、电机动力线、抱闸线圈、门机、照明两端的绝缘电阻值,确保绝缘电阻值在规定值之内。
重新接上地线和LCBII 板上的插件。
2.4 抱闸清洗和调节2.4.1清洗抱闸2.4.1.1 按上锁挂牌程序,将电梯控制柜断电。
2.4.1.2 由于轿厢的空载重量比对重轻,为确保人身和设备的安全,在拆抱闸前必须将电梯的对重完全压在缓冲器上。
2.4.1.3 松开抱闸弹簧两端的螺母和锁紧螺母,慢慢取出弹簧,此时要注意,如果缓冲器未被完全压缩,轿厢会移动。
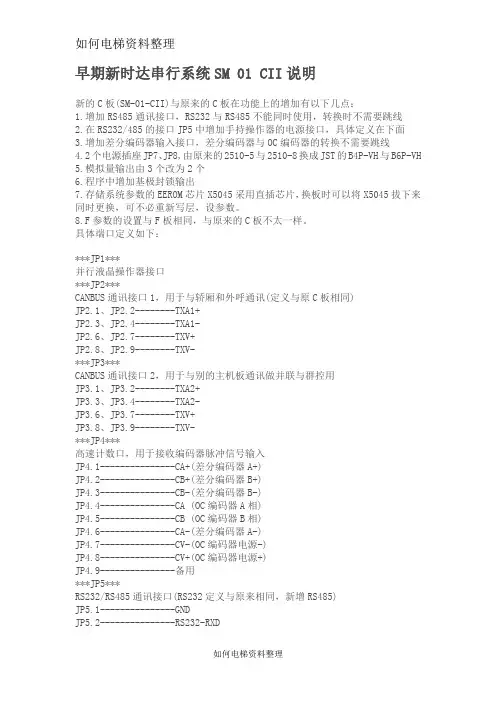
早期新时达串行系统SM 01 CII说明新的C板(SM-01-CII)与原来的C板在功能上的增加有以下几点:1.增加RS485通讯接口,RS232与RS485不能同时使用,转换时不需要跳线2.在RS232/485的接口JP5中增加手持操作器的电源接口,具体定义在下面3.增加差分编码器输入接口,差分编码器与OC编码器的转换不需要跳线4.2个电源插座JP7、JP8,由原来的2510-5与2510-8换成JST的B4P-VH与B6P-VH5.模拟量输出由3个改为2个6.程序中增加基极封锁输出7.存储系统参数的EEROM芯片X5045采用直插芯片,换板时可以将X5045拔下来同时更换,可不必重新写层,设参数。
8.F参数的设置与F板相同,与原来的C板不太一样。
具体端口定义如下:***JP1***并行液晶操作器接口***JP2***CANBUS通讯接口1,用于与轿厢和外呼通讯(定义与原C板相同)JP2.1、JP2.2--------TXA1+JP2.3、JP2.4--------TXA1-JP2.6、JP2.7--------TXV+JP2.8、JP2.9--------TXV-***JP3***CANBUS通讯接口2,用于与别的主机板通讯做并联与群控用JP3.1、JP3.2--------TXA2+JP3.3、JP3.4--------TXA2-JP3.6、JP3.7--------TXV+JP3.8、JP3.9--------TXV-***JP4***高速计数口,用于接收编码器脉冲信号输入JP4.1---------------CA+(差分编码器A+)JP4.2---------------CB+(差分编码器B+)JP4.3---------------CB-(差分编码器B-)JP4.4---------------CA (OC编码器A相)JP4.5---------------CB (OC编码器B相)JP4.6---------------CA-(差分编码器A-)JP4.7---------------CV-(OC编码器电源-)JP4.8---------------CV+(OC编码器电源+)JP4.9---------------备用***JP5***RS232/RS485通讯接口(RS232定义与原来相同,新增RS485)JP5.1---------------GNDJP5.2---------------RS232-RXDJP5.3---------------RS232-TXDJP5.4---------------RS485-AJP5.5---------------GNDJP5.6---------------RS232-DTRJP5.7---------------RS232-DCDJP5.8---------------RS485-BJP5.9---------------+5V***JP6***输入输出接口JP6.1---- AC-L ---220V电源输入JP6.2---- GND ---接地端JP6.3---- AC-N ---220V电源输入JP6.4---- COM1 ---输出继电器Y0、Y1、Y2、Y3的公共端JP6.5---- Y0 ---抱闸接触器JP6.6---- Y1 ---抱闸强激接触器JP6.7---- Y2 ---调速器进线接触器JP6.8---- Y3 ---调速器出线接触器JP6.9---- COM2 ---输出继电器Y4、Y5、Y6、Y7的公共端JP6.10--- Y4 ---上行信号JP6.11--- Y5 ---下行信号JP6.12--- Y6 ---运行使能JP6.13--- Y7 ---基极封锁JP6.14--- COM3 ---输出继电器Y8、Y9的公共端JP6.15--- Y8 ---开门继电器JP6.16--- Y9 ---关门继电器JP6.17--- G24 ---输入点的公共端JP6.18--- G24 ---输入点的公共端JP6.19--- X0 ---检修/自动开关JP6.20--- X1 ---上行按钮JP6.21--- X2 ---下行按钮JP6.22--- X3 ---门锁继电器检测JP6.23--- X4 ---抱闸接触器检测JP6.24--- X5 ---上行限位开关JP6.25--- X6 ---下行限位开关JP6.26--- X7 ---上行单层终端减速开关JP6.27--- X8 ---下行单层终端减速开关JP6.28--- X9 ---门锁回路JP6.29--- X10 ---安全回路JP6.30--- X11 ---上平层开关JP6.31--- X12 ---下平层开关JP6.32--- X13 ---调速器出错JP6.33--- X14 ---消防JP6.34--- X15 ---变频器输出接触器检测JP6.35--- X16 ---上行多层终端减速开关JP6.36--- X17 ---下行多层终端减速开关JP6.37--- V1 ---模拟速度给定,输出到调速器的速度设定端,0-10V信号JP6.38--- V2 ---模拟负载补偿信号,输出到调速器的力矩补偿端,±10V 信号JP6.39--- 0V ---模拟信号0VJP6.40--- 0V ---模拟信号0V***JP7***220V电源接口JP7.1、JP7.2------AC-N(与JP6.3内部连通)JP7.3、JP7.4------AC-L(与JP6.1内部连通)***JP8***主板工作电源输入接口JP8.1、JP8.2------+5V(内部连通)JP8.3、JP8.4------0V(内部连通)JP8.5、JP8.6------+24V(内部连通)板上跳线:J1:手持操作器+5V电源J2:RS485通讯终端电阻J3:并联或群控CANBUS通讯终端电阻J4,J5:编码器电源选择,编码器用外接电源时J4:1,2J5:1,2编码器用板内+12V电源供电时J4:2,3J5:2,3。
这里给出输入类型的目的是要求现场的开关类型和此相同,不需要的常闭点现场可以短接处理(如X3、X4等)。
*****变频驱动时,设置F58=0。
*****对应输入点的LED显示对照表为1.4.2 主板工作电源接口定义正视主控制器左边为JP5端子,它是为主控制器提供工作电源的接口,由外部开关电源供电;具体定义见下表:1.4.3主板通讯接口定义正视主控制器右上角为JP6、JP22端子,JP6是作为连接轿厢板的通讯端口,必须采用双绞线,TXV1+、TXV1-用一股双绞线,而TXA1+、TXA1-用另一股双绞线;JP22是作为并联接口,作并联时对应连接两台主机的JP22.1、P22.2和JP22.3三根线,其中TXA2+和TXA2-用一股双绞线;具体定义见下表:1.4.4 主板输出接口定义主控制器右边的JP7、JP8端子共16点为继电器开关量输出,SM-Sec型主板有分为4组共16点的开关量输出,其中Y0、Y1、Y2、Y3四个点的公共端为COM1(JP7-5);Y4、Y5、Y6三个点的公共端为COM2(JP7-9);Y7的公共端为COM3(JP8-1),Y8、Y9、Y10、Y11、Y12、Y13,Y14,Y15八个点的公共端为COM4(JP8-10),每个点的定义如下表所示:对于输入Xn,如果该输入点是常开信号,若此时Xn 对应的LED点亮,则Xn信号闭合。
如果该输入点是常闭的,平时此LED是点亮的,若该点动作,则LED 熄灭。
对于输出Yn,如果Yn发光LED点亮,说明对应的Yn输出点继电器吸合,即Yn输出了一个"ON"信号,如果Yn连接的是接触器或继电器,则该接触器或继电器的线圈通电。
1.4.5安全检测接口定义主控制器右下角的JP11端子,为安全回路和门锁回路的检测,110V电压输入端口,输入的电压可以是交流,也可以是直流,但输入直流时,一定应区分电压正负的接入,如安全回路的负端一定得接JP11.2,具体定义见下表:1.4.6 力矩补偿给定接口定义主控制器的JP23端子,为模拟负载补偿信号输出,具体定义见下表:1.4.7 编码器输入接口定义主控制器左上角为JP12端子,其中JP12的1至8脚为编码器输入接口,具体定义见下表:1.4.8 厅外呼梯开关输入端口主控制器右下角为JP9、JP10端子,为厅外呼梯开关的输入,具体定义见下表:1.4.9 呼梯点灯输出端口主控制器右下中间为JP13、JP14端子,为厅外呼梯指示灯,具体定义见下表:1.4.10 楼层指示输出端口主控制器右下角为JP15端子,为厅外楼层指示,兼容七段码驱动、格雷码驱动,BCD码或二进制码输出驱动,具体定义见下表:1.七段码驱动时定义如下:2.格雷码驱动时定义如下:3.BCD码或二进制码输出4.输出的公共端1.4.11 其它接口定义的说明DB1: 手持编程器接口,也可以做远程监控的接口,当作为手持编程器接口时,其手持式编程器,不仅能显示电梯速度、方向、状态,而且还能显示电梯的给定速度曲线和反馈速度曲线。
一.新时达电梯调试注意事项所有进行电梯安装、调试必须注意安全,遵守安全操作规范。
二.电梯运行舒适感相关的因素主要有:1. 机械因素;(导轨垂直度、表面平整、连接处、导靴松紧,钢丝绳张力均匀等)2. 运行曲线相关参数设置;(加速度,减速度,S曲线弯角时间,起动抱闸延时,停车抱闸延时等)3. 矢量控制相关PI参数设置。
(比例增益,积分时间等)如果机械系统方面存在着问题,主板参数和变频器参数也只能是使舒适感更好一些,而无法根本改变机械缺陷。
三.舒适感的性能指标1. 电梯起动舒适感起动是否平稳,有无台阶感、振动等;2. 电梯高速运行中舒适感高速运行是否平稳,有无振动、晃动等;3. 电梯停车舒适感平层停车是否平稳可**有无制动感、振动等;以上三点舒适感须作重点考虑并调试。
四、电梯调试流程概述及要点1. 线路检查,包括:通电前线路检查,通电后线路检查2. 曳引机整定旋编安装,参数设置,曳引机自整定3. 慢车运行安全回路,门锁回路,上、下限位,上、下强慢4. 井道学习井道各开关,平层感应器,井道学习,井道学习数据保存5. 快车运行单层、双层、多层、顶层、底层运行,冲顶沉底试验6. 舒适感调试机械调整,运行曲线设定,速度环PI值,(电流环PI值)7. 功能检查按合同要求逐一测试各项标准功能和特殊功能,8. 平层调整平层精度测量记录,平层感应器插板调整,相应平层参数调整五.标准参数在实践中,我们总结出了一套标准参数,这就是下面我们所说的推荐参数,效果比较理想。
模拟量速度给定舒适感的调试一. SM-01主板相关参数的调整电梯准备运行,先打开抱闸,经F16(打开抱闸机械延时时间)后,开始按S曲线运行:起动起动过渡时间T0 匀加速F0 加速末过渡时间T1 匀速运行初减速过渡时间T2 匀减速F1 平层信号检测减速停车过渡时间T3 消号停车,经F17(释放抱闸机械延时时间)后,抱闸、开门。
参数号参数名称推荐值及范围参数范围F16 抱闸延时1 10(5~12) 电梯起动时,先打开抱闸,经过此延时后才给出速度。
新时达机器人入门1 认识STEP机器人【学习目标】掌握机器人系统的构成;了解机器人系统中每一部分的含义;了解机器人的一些重要参数;了解STEP机器人的编程方式;STEP机器人是一种模拟人手臂、手腕和手功能的机电一体化装置,可以对物体运动的位置、速度、加速度进行精确控制,从而完成某一工业生产的作业要求。
STEP机器人系统由机械本体、控制柜、示教器组成。
如下图所示STEP机器人的软件系统STEP机器人的硬件系统电机交流伺服电机(多摩川、婓叶、拉法特)减速机谐波减速机和RV减速机CPU 32位高速380v/3相4线目前开发有码垛Pallet、焊接Arc、折弯Bend功能包。
输入电源I/O设备自主I/O、魏德米勒I/O(裸机标配16DI,16DO)1.1 机器人的用途新时达机器人现可以进行弧焊,搬运,折弯。
1.2 新时达机器人的型号目前新时达机器人有SD系列,SA系列,SR系列,SP系列。
SD系列:SD500E,SDA500E,SD700E,SDA700E;SA系列:SA1400,SA1400A,SA1800;SR系列:SR20,SR50E,SR50B,SR165,SR210; SP系列:SP120,SP200,SP275;具体介绍请参考样本和本体使用说明书;1.3 机器人的主要参数(SA1400为例)手部负重:6KG运动轴数:6运动范围:1400mm安装方式:正装、吊装重复定位精度:正负0.05mm最大速度:1500mm/s其他参数和其他机型请参考本体使用说明书;1.4 STEP机器人的安装环境环境温度:0-45摄氏度环境湿度:普通:75%RH振动:4.9m/s2以下其他参数和其他机型请参考本体使用说明书;1.5 STEP机器人的编程方式在线编程,暂时不具备离线仿真功能;2搬运、拆箱、连线机器人【学习目标】掌握机器人的拆箱;掌握机器人的搬运、固定和倒装具体操作; 掌握机器人的线路连接;2.1 拆箱机器人将机器人从木箱中取出,拆箱后如下图所示。
调试指导说明通电前检查控制系统电气安装完毕后,必须对电气部分进行检查:1. 应对照使用说明书和电气原理图,检查各部分的连接是否正确.2。
检查强电部分和弱电部分是否有关联。
用万用表欧姆档检查不同电压回路之间电阻、对地电阻应为∞。
3. 请认真检查控制柜电源进线与电机连线是否正确.避免上电后烧毁变频器。
4。
检查控制柜壳体、电动机壳体、轿厢接地线、厅门接地线是否可靠安全接地,确保人身安全。
▲注意:柜壳体与电动机壳体要一点接地.通电后检查1。
合上总电源开关。
若相序继电器KAP 上绿灯亮,则表示相位正确。
若绿灯不亮,关闭总电源,调换任意两相相位然后重新上电.2. 检查控制柜中隔离变压器TCO 各端子电压,是否在其标称范围内。
3. 在上述步骤正确的前提下,进行如下步骤:1)合上熔丝FUn(n=1,2,3······);2)合上开关电源控制开关;开关电源TPB 得电,同时主板得电工作。
开关电源各端子电压如下:表4—1 开关电源各端子电压端子L~N 24V~COM电压220±7%VAC 24.0±0。
3VDC3)将控制柜急停开关复位,安全回路接通,主板输入点对应LED 灯亮。
4)检查如下回路:◆检查门锁回路是否正常;◆检查门区信号、上下限位信号是否正常;◆手持编程器上电梯工作状态此时应显示“检修";如有不正常请做相应检查并改正。
系统参数设定1.变频器参数(电机参数自学习)根据现场实际情况正确设定系统参数,具体参数的定义和设置方法请参考正确设定系统参数,具体参数的定义及设置方法请参考第三章和附录B。
1)在进行慢车调试之前,必须正确设定所配置变频器的参数;2)不同型号的变频器的具体参数的设置可以参看附录或变频器说明书;3)基本电机参数的设定可以通过铭牌输入。
电机参数自学习参看所使用的变频器使用说明书.电机参数自学习的步骤:关掉电梯电源,按下控制柜上的急停开关,将控制柜中自动运行/检修开关拨至检修位置; 确认主机抱闸线已正确接在控制柜ZQ1、ZQ2 端子上;吊起轿厢,移去主机曳引轮上的钢丝绳,并加以保护,以防磨损;确认主机曳引轮及其他运转部件在运行时无阻碍;跨接线:保证安全回路102-114 为通路,门锁回路120—118 为通路;将主板上的输出接触器Y0,Y1,Y2,Y3 和其公共端上对应的线拆下,并作好标记,合并在一起,用绝缘胶带缠好,以防短路。