离散线性时不变系统分析
- 格式:doc
- 大小:978.39 KB
- 文档页数:14
线性时不变系统的稳定性分析稳定性是控制系统理论中的重要概念,对于线性时不变系统来说尤其重要。
稳定性分析可以帮助我们确定系统的输出是否会在输入变化或干扰的情况下产生不受控制的波动或发散。
本文将探讨线性时不变系统的稳定性分析方法。
一、线性时不变系统的定义线性时不变系统(Linear Time-Invariant System,LTI系统)是指满足叠加性和时移不变性两个性质的系统。
叠加性指系统对输入的响应是可加的,时移不变性指系统对延时输入的响应是不变的。
线性时不变系统可以用微分方程或差分方程来描述。
二、稳定性的定义在系统稳定性分析中,我们关注的是系统的零输入响应或者零状态响应。
稳定性可以分为BIBO稳定性和渐近稳定性两种类型。
1. BIBO稳定性BIBO稳定性(Bounded-Input Bounded-Output Stability)是指当输入有界时,系统的输出也是有界的。
如果对于任意有界的输入信号,系统的输出都有界,则系统是BIBO稳定的。
2. 渐近稳定性渐近稳定性是指当输入信号趋于稳定时,系统的输出也趋于稳定。
如果对于任意渐近稳定的输入信号,系统的输出也渐近稳定,则系统是渐近稳定的。
三、稳定性分析方法稳定性分析的常用方法包括传输函数法、状态空间法和频域法。
下面将分别介绍这三种方法。
1. 传输函数法传输函数法是用传输函数来描述系统的稳定性。
传输函数是输入和输出的关系,它是Laplace变换或Z变换的比值。
对于连续时间系统,传输函数可以表示为H(s);对于离散时间系统,传输函数可以表示为H(z)。
通过分析传输函数的极点(Pole)可以判断系统的稳定性。
对于连续时间系统,如果传输函数的极点都位于左半平面,则系统是BIBO稳定的;如果传输函数的极点有位于右半平面的,则系统是不稳定的。
对于离散时间系统,如果传输函数的极点都位于单位圆内部,则系统是BIBO稳定的;如果传输函数的极点有位于单位圆外部的,则系统是不稳定的。
实验六 离散线性时不变系统分析一、 实验目的1. 掌握离散LSI 系统的单位序列响应、单位阶跃响应和任意激励下响应的MATLAB 求解方法。
2. 掌握离散LSI 系统的频域分析方法;3. 掌握离散LSI 系统的复频域分析方法;4. 掌握离散LSI 系统的零极点分布与系统特性的关系。
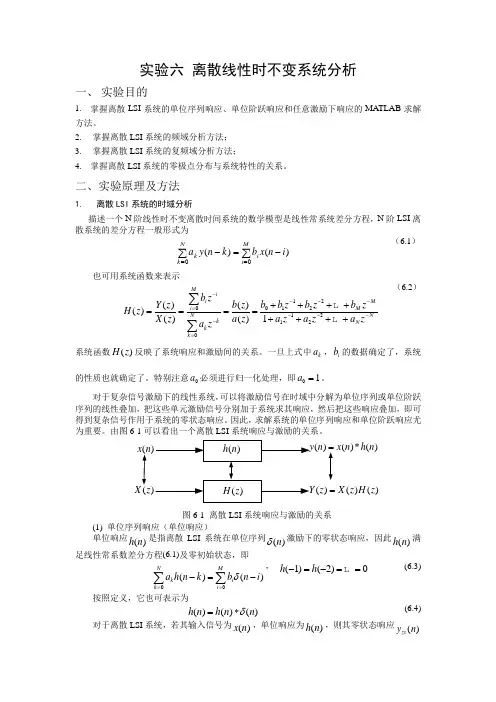
二、实验原理及方法1.离散LSI 系统的时域分析描述一个N 阶线性时不变离散时间系统的数学模型是线性常系统差分方程,N 阶LSI 离散系统的差分方程一般形式为)()(0i n x b k n y a Mi i N k k -=-∑∑== (6.1) 也可用系统函数来表示12001212120()()()()()1MiM ii M NNkN k k b zb b z b z b z Y z b z H z X z a z a z a z a z a z----=----=++++====++++∑∑ (6.2)系统函数()H z 反映了系统响应和激励间的关系。
一旦上式中k a ,i b 的数据确定了,系统的性质也就确定了。
特别注意0a 必须进行归一化处理,即01a =。
对于复杂信号激励下的线性系统,可以将激励信号在时域中分解为单位序列或单位阶跃序列的线性叠加,把这些单元激励信号分别加于系统求其响应,然后把这些响应叠加,即可得到复杂信号作用于系统的零状态响应。
因此,求解系统的单位序列响应和单位阶跃响应尤为重要。
由图6-1可以看出一个离散LSI 系统响应与激励的关系。
()h n ()H z ()x n ()X z ()()()Y z X z H z =()()*()y n x n h n =图6-1 离散LSI 系统响应与激励的关系(1) 单位序列响应(单位响应)单位响应()h n 是指离散LSI 系统在单位序列()n δ激励下的零状态响应,因此()h n 满足线性常系数差分方程(6.1)及零初始状态,即()()N Mkik i a h n k b n i δ==-=-∑∑, (1)(2)0h h -=-== (6.3)按照定义,它也可表示为()()()h n h n n δ=* (6.4) 对于离散LSI 系统,若其输入信号为()x n ,单位响应为()h n ,则其零状态响应()zsy n为()()*()zs y n x n h n = (6.5)可见,()h n 能够刻画和表征系统的固有特性,与何种激励无关。
信号、系统与信号处理实验报告实验一、离散时间系统的时域特性分析姓名:学号:班级:专业:一.实验目的线性时不变(LTI)离散时间系统在时域中可以通过常系数线性差分方程来描述,冲激响应列可以刻画时域特性。
本次实验通过使用MATLAB函数研究离散时间系统的时域特性,以加深对离散时间系统的差分方程、冲激响应和系统的线性和时不变性的理解。
二.基本原理一个离散时间系统是将输入序列变换成输出序列的一种运算。
离散时间系统中最重要、最常用的是“线性时不变系统”。
1.线性系统满足叠加原理的系统称为线性系统,即若某一输入是由N个信号的加权和组成的,则输出就是系统对这几个信号中每一个输入的响应的加权和。
即那么当且仅当系统同时满足和时,系统是线性的。
在证明一个系统是线性系统时,必须证明此系统同时满足可加性和比例性,而且信号以及任何比例系数都可以是复数。
2.时不变系统系统的运算关系在整个运算过程中不随时间(也即序列的先后)而变化,这种系统称为时不变系统(或称移不变系统)。
若输入的输出为,则将输入序列移动任意位后,其输出序列除了跟着位移外,数值应该保持不变,即则满足以上关系的系统称为时不变系统。
3.常系数线性差分方程线性时不变离散系统的输入、输出关系可用以下常系数线性差分方程描述:当输入为单位冲激序列时,输出即为系统的单位冲激响应。
当时,是有限长度的,称系统为有限长单位冲激响应(FIR)系统;反之,则称系统为无限长单位冲激响应(IIR)系统。
三.实验内容及实验结果1.实验内容考虑如下差分方程描述的两个离散时间系统:系统1:系统2:输入:(1)编程求上述两个系统的输出,并画出系统的输入与输出波形。
(2)编程求上述两个系统的冲激响应序列,并画出波形。
(3)若系统的初始状态为零,判断系统2是否为时不变的?是否为线性的?2.实验结果(1)编程求上述两个系统的输出和冲激响应序列,并画出系统的输入、输出与冲激响应波形。
clf;n=0:300;x=cos((20*pi*n)/256)+cos((200*pi*n)/256);num1=[0.5 0.27 0.77];den1=[1];num2=[0.45 0.5 0.45];den2=[1 -0.53 0.46];y1=filter(num1,den1,x);y2=filter(num2,den2,x);subplot(3,1,1);stem(n,x);xlabel('时间信号');ylabel('信号幅度');title('输入信号');subplot(3,1,2);stem(y1);xlabel('时间信号n');ylabel('信号幅度');title('输出信号');subplot(3,1,3);stem(y2);xlabel('时间序号n ');ylabel('信号幅度');title('冲激响应序列');(2)N=40;num1=[0.5 0.27 0.77];den1=[1];num2=[0.45 0.5 0.45];den2=[1 -0.53 0.46];y1=impz(num1,den1,N);y2=impz(num2,den2,N);subplot(2,1,1);stem(y1);xlabel('时间信号n ');ylabel('信号幅度');title('³冲激响应');subplot(2,1,2);stem(y2);xlabel('时间信号n ');ylabel('信号幅度');title('³冲激响应');1.应用叠加原理验证系统2是否为线性系统:clear allclcn = 0 : 1 : 299;x1 = cos(20 * pi * n / 256);x2 = cos(200 * pi * n / 256);x = x1 + x2;num = [0.45 0.5 0.45];den = [1 -0.53 0.46];y1 = filter(num, den, x1);y2 = filter(num, den, x2);y= filter(num, den, x);yt = y1 + y2;figuresubplot(2, 1, 1);stem(n, y, 'g');xlabel('时间信号n');ylabel('信号幅度');axis([0 100 -2 2]);grid;subplot(2, 1, 2);stem(n, yt, 'r');xlabel('时间信号n');ylabel('信号幅度');axis([0 100 -2 2]);grid;2.应用时延差值来判断系统2是否为时不变系统。
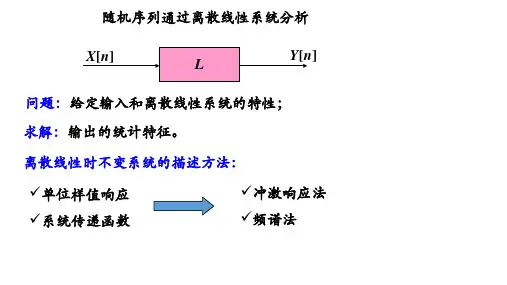
问题:给定输入和离散线性系统的特性;求解:输出的统计特征。
✓冲激响应法✓频谱法]离散线性时不变系统的描述方法:✓单位样值响应✓系统传递函数⏹冲激响应法⏹频谱法⏹常用时间序列模型][][][][][]k Y n h k X n k h n X n +∞=−∞=−=∗∑系统输出:均值:[]([])([()])[][]Y X m n E Y n E L X n h n m n ===∗X m []Y n[,][][][,]121212Y X R n n h n h n R n n =∗∗[,]([][])[][,]1212212XY X R n n E X n Y n h n R n n ==∗相关函数:][][][][][]k Y n h k X n k h n X n +∞=−∞=−=∗∑系统输出:[][][]XY X R m h m R m =−∗[][][][]Y X R m h m h m R m =−∗∗[]()0Y X X k m m h k m H +∞=−∞=∑若X [n ]平稳:则输出平稳,而且输入输出联合平稳2. 频谱法若X [n ]平稳:2()()()|()|()Y XY X G H G H G ωωωωω==*()()()XY X G H G ωωω=1()()()XY X G z H z G z −=1()()()()()()Y XY X G z H z G z H z H z G z −==若用z 变换表示:则输出平稳,而且输入输出联合平稳只适用于平稳随机序列的分析例1:一个平稳随机序列X[n]的自相关函数为,线性系统的单位样值响应是, 求输出Y(n)的自相关函数及功率谱密度。
2[]m σδ[],nh n r =0,||1n r ≥<[][][][]Y X R m h m h m R m =−∗∗2[][]h m h m =−∗σ222201mm k k r r r r ∞==−∑σσ[解]20k m kk r r ∞+=⋅∑σ当m ≧0时,例1:一个平稳随机序列X[n]的自相关函数为,线性系统的单位样值响应是, 求输出Y(n)的自相关函数及功率谱密度。
离散时间系统稳定的充要条件离散时间系统是指系统的输入和输出在时间上是离散的情况下进行的系统分析和设计。
而离散时间系统的稳定性是一个重要的性质,它决定了系统是否能够在一定范围内保持稳定的输出。
本文将介绍离散时间系统稳定性的充要条件。
一、离散时间系统的稳定性概念稳定性是指系统在有限时间内是否能够保持有限的幅值,而不会出现无限增长或发散的情况。
对于离散时间系统而言,其稳定性可以分为两类:绝对稳定和相对稳定。
绝对稳定是指系统的输出在有限时间内始终保持有限的幅值,不会发散或无限增长。
相对稳定是指系统的输出在有限时间内保持有限的幅值,但可能会在无穷时间后发散或无限增长。
二、离散时间系统的稳定性充要条件1. 线性时不变系统对于线性时不变系统而言,其稳定性充要条件是系统的传递函数的极点都位于单位圆内。
也就是说,系统的所有极点的模长都小于1。
2. 有限冲激响应系统对于有限冲激响应系统而言,其稳定性充要条件是系统的冲激响应是绝对可和的。
也就是说,系统的冲激响应的绝对和是有限的。
3. 时变系统对于时变系统而言,其稳定性充要条件是系统的输入和输出序列都是绝对可和的,并且系统的输入和输出序列的绝对和都是有界的。
4. 有限差分方程系统对于有限差分方程系统而言,其稳定性充要条件是系统的差分方程的根都位于单位圆内。
也就是说,系统的所有根的模长都小于1。
5. 正态系统对于正态系统而言,其稳定性充要条件是系统的所有特征值的实部都小于等于零。
6. 离散时间系统的Lyapunov稳定性对于离散时间系统而言,其稳定性充要条件是系统的状态方程存在一个正定矩阵,使得系统的状态的Lyapunov函数是递减的。
三、离散时间系统的稳定性判定方法除了以上充要条件外,还可以通过以下方法判断离散时间系统的稳定性:1. 构造系统的Lyapunov函数。
通过构造系统的Lyapunov函数来判断系统的稳定性。
如果系统的状态的Lyapunov函数是递减的,则系统是稳定的。
第5章线性时不变系统的变换分析[教学目的]1.了解LTI 系统频率响应的概念;2.掌握线性常系数差分方程所表征系数的系统函数的方法;3.掌握有理系统频率响应分析方法4.理解线性相位系统、广义线性相位系统与因果广义线性相位系统的概念,几类线性相位系统。
[教学重点与难点]重点:1.线性常系数差分方程所表征系数的系统函数的方法;2.有理系统频率响应分析方法;3.几类线性相位系统。
难点:1. 有理系统频率响应分析方法几类线性相位系统5.1 LTI 系统的频率响应前面已经讨论过,在时域中,一个线性时不变系统完全可以由它的单位脉冲响应h (n )来表示。
对于一个给定的输入x (n ),其输出y (n )为对等式两端取Z 变换,得则 (5-1)两边做离散傅立叶变换有:|Y (e j ω)|=|H (e j ω)|·|X (e j ω)| (5-2)|Y (e j ω)|=|H (e j ω)|·|X (e j ω)|arg [Y (e j ω)]=arg [H (e j ω)]+arg [X (e j ω)]|H (e j ω)| 幅度响应 : 增益/幅频特性调整输入信号各频率分量的相对强度(幅度)关系Arg[H (e j ω)] 频率响应的相位响应 : 相移/相频特性调整输入信号各频率分量的相对位置(相位)关系H (e j ω) 调整输入信号各频率分量的相对大小(幅度)及位置(相∑∞-∞=-=*=m m n h m x n h n x n y )()()()()()()()(z X z H z Y =)()()(z X z Y z H =位)关系5.1.1理想低通滤波器的选择性5.1.2相位失真与延时线性相位 : 不会改变信号的相对位置,时延相同线性相位的效应 : 时延 非线性相位:改变信号的相对位置时延不相同⎩⎨⎧≤<≤=πωωωωω||,0||,1)(c c j H n n n h c F πωsin ][=−→←()()|()|j H j H j H j eωωω=0 : ()near Phase H j t ωω=-0()H j t ωω≠-5.2 用线性常系数差分方程所表征系统的系统函数一个线性时不变系统也可以用常系数线性差分方程来表示,其N 阶常系数线性差分方程的一般形式为若系统起始状态为零,这样就可以直接对上式两端取Z 变换,利用Z 变换的线性特性和移位特性可得这样就得到系统函数为(5-3)由此看出系统函数分子、分母多项式的系数分别就是差分方程的系数。
实验六 离散线性时不变系统分析一、 实验目的1. 掌握离散LSI 系统的单位序列响应、单位阶跃响应和任意激励下响应的MATLAB 求解方法。
2. 掌握离散LSI 系统的频域分析方法;3. 掌握离散LSI 系统的复频域分析方法;4. 掌握离散LSI 系统的零极点分布与系统特性的关系。
二、实验原理及方法1.离散LSI 系统的时域分析描述一个N 阶线性时不变离散时间系统的数学模型是线性常系统差分方程,N 阶LSI 离散系统的差分方程一般形式为)()(0i n x b k n y a Mi i N k k -=-∑∑== (6.1) 也可用系统函数来表示12001212120()()()()()1MiM ii M NNkN k k b zb b z b z b z Y z b z H z X z a z a z a z a z a z----=----=++++====++++∑∑ (6.2)系统函数()H z 反映了系统响应和激励间的关系。
一旦上式中k a ,i b 的数据确定了,系统的性质也就确定了。
特别注意0a 必须进行归一化处理,即01a =。
对于复杂信号激励下的线性系统,可以将激励信号在时域中分解为单位序列或单位阶跃序列的线性叠加,把这些单元激励信号分别加于系统求其响应,然后把这些响应叠加,即可得到复杂信号作用于系统的零状态响应。
因此,求解系统的单位序列响应和单位阶跃响应尤为重要。
由图6-1可以看出一个离散LSI 系统响应与激励的关系。
()()()z X z H z =()()*()n x n h n图6-1 离散LSI 系统响应与激励的关系(1) 单位序列响应(单位响应)单位响应()h n 是指离散LSI 系统在单位序列()n δ激励下的零状态响应,因此()h n 满足线性常系数差分方程(6.1)及零初始状态,即()()N Mkik i a h n k b n i δ==-=-∑∑, (1)(2)0h h -=-== (6.3)按照定义,它也可表示为()()()h n h n n δ=* (6.4) 对于离散LSI 系统,若其输入信号为()x n ,单位响应为()h n ,则其零状态响应()zsy n为()()*()zs y n x n h n = (6.5)可见,()h n 能够刻画和表征系统的固有特性,与何种激励无关。
一旦知道了系统的单位响应()h n ,就可求得系统对任何输入信号()x n 所产生的零状态响应()zsy n 。
MATLAB 提供了专门用于求连续系统冲激响应的函数impz(),其调用格式有 [h,n]=impz(b,a)求解离散系统的单位响应,其中012[,,,,]M b b b b b =,12[1,,,,]Na a a a =,[0,1,2,]n '=;[h,n]=impz(b,a,N)求解离散系统的单位响应,采样点数由N 确定,[0,1,2,,N-1]n '=;impz(b,a) :在当前窗口,用stem(n,h)绘出图形。
(2)单位阶跃响应单位阶跃响应()s n 是指离散LTI 系统在单位阶跃序列()u n 激励下的零状态响应,它可以表示为()()()()nm s n u n h n h m =-∞=*=∑ (6.6)上式表明,离散LSI 系统的单位阶跃响应是单位响应的累加和,系统的单位阶跃响应和系统的单位响应之间有着确定的关系,因此,单位阶跃响应也能完全刻画和表征一个LSI 系统。
MATLAB 提供了专门用于求离散系统单位阶跃响应的函数stepz( ),其调用格式有 [s,n]=stepz(b,a) :求解离散系统的单位阶跃响应,其中012[,,,,]Mb b b b b =,12[1,,,,]N a a a a =,[0,1,2,]n '=;[s,n]=stepz(b,a,N) :求解离散系统的单位阶跃响应,采样点数由N 确定,[0,1,2,,N-1]n '=;stepz(b,a) :在当前窗口,用stem(n,s)绘出图形。
(3) 任意激励下的零状态响应已经知道,离散LSI 系统可用常系数线性差分方程(6.1)式来描述,Matlab 提供的函数dlsim( )能对上述差分方程描述的离散LSI 系统的响应进行仿真,该函数不仅能绘制指定时间范围内的系统响应波形图,而且还能求出系统响应的数值解。
其调用格式有dlsim(b,a, x) :求解输入序列为x 的零状态响应需要特别强调的是,Matlab 总是把由分子和分母多项式表示的任何系统都当作是因果系统。
所以,利用impz (b,a),stepz(b,a),d lsim(b,a,x)函数求得的响应总是因果信号。
同时,卷积和也是LSI 系统求解零状态响应的重要工具之一。
假设系统的输入信号为()x n ,单位响应为()h n ,则系统的零状态响应()zs y n 可由(6.5)式求解。
Matlab 提供了专门用于求离散系统卷积和的函数conv( ),其调用格式有y=conv(x,h) :求解序列x ,h 的卷积和,若序列x 的长度为n1,序列h 的长度为n2,卷积和y 的长度为n1+n2-1。
这一点需要特别注意,否则,作图时容易造成横纵坐标长度不匹配。
(4)带初始状态的任意激励下的全响应任意激励下的离散LSI 系统的全响应为零输入响应和零状态响应之和,表示为()()()zi zs y n y n y n =+ (6.7)在理论学习的过程中,同学们对低阶差分方程的求解已颇为头痛,高阶差分方程直接求解几乎不可能。
Matlab 提供了用于求离散系统全响应的函数filter( ),其调用格式有y=filter( b,a,x) :求解零状态响应;y=filter( b,a,x,zi) :求解初始条件为zi 的系统的全响应,zi 向量的长度为max(length(a),length(b))-1,返回值为系统的全响应。
z = filtic(b,a,y,x):将初始状态转换为初始条件,其中[(1),(2),(3),,()]x x x x x m =----,[(1),(2),(3),,()]y y y y y n =----;z = filtic(b,a,y):将初始状态转换为初始条件,其中0x =,[(1),(2),(3),,()]y y y y y n =----。
2 离散LSI 系统的复频域(Z 域)分析 (1)利用Z 变换解差分方程在前面图6-1中表示了离散系统的响应与激励的关系,由图可知,系统的响应既可以用时域的方法求解,也可以用Z 域的方法求解。
当已知系统输入序列的Z 变换()X z ,系统函数()H z 时,系统响应序列的Z 变换可由()()()Y z X z H z =求出。
Matlab 提供了用于求序列Z 变换和Z 反变换的函数,其调用格式有X=ztrans(x):求无限长序列x 的Z 变换,返回Z 变换的表达式,注意这里x ,X 都是符号表达式;x=iztrans(X):求X (z )的Z 反变换x(n),返回Z 反变换的表达式,注意这里x ,X 都是符号表达式;[r,p,c]=residuez(b,a):把b(z)/a(z)展开成部分分式;[b,a]=residuez(r,p,c):根据部分分式的r 、p 、c 数组,返回有理多项式。
(2)系统的零极点分布与系统因果性和稳定性的关系因果系统的单位响应)(n h 一定满足当0<n 时,)(n h =0,那么其系统函数)(z H 的收敛域一定包含∞点,即∞点不是极点,极点分布在某个圆的圆内,收敛域是圆外区域。
系统稳定要求 ∞<∑∞-∞=n n h |)(| ,对照z 变换定义,系统稳定要求收敛域包含单位圆。
如果系统因果且稳定,收敛域包含∞点和单位圆,那么收敛域可表示为:10,||<<∞≤<r z r (6.8)MATLAB 提供了用于求系统零极点的函数,其调用格式有 roots():利用多项式求根函数来确定系统函数的零极点位置;roots(a):求极点位置,a 为系统函数)(z H 分母多项式所构成的系数向量; roots(b):求零点位置,b 为系统函数)(z H 分子多项式所构成的系数向量;zplane(b,a):绘制由行向量b 和a 构成的系统函数的零极点分布图;zplane(z,p):绘制由列向量z 确定的零点、列向量p 确定的极点构成的零极点分布图。
(3)系统的零极点分布与系统频率响应的关系 将式(6.2)因式分解,得到∏∏=-=---=Nk k Mmm z d z c A z H 1111)1()1()( (6.9) 式中,00a bA =,m c 是)(z H 的零点,k d 是其极点。
A 参数影响频率响应的幅度大小,影响系统特性的是零点m c 和极点k d 的分布。
下面采用几何方法研究系统零极点分布对系统频率特性的影响。
将式(6.9)的分子、分母同乘以M N z +,得到:∏∏∏∏==-=-=---=--=N k kMm mMN Nk kMm mdz cz Az z dz cA z H 111111)()()1()1()( (6.10)假设系统稳定,将ωj e z =代入上式,得到频率响应)](arg[11)()()()()(ωωωωωωj eH j j N k kjMm m j M N j j e e H de c e Ae e H =--=∏∏==- (6.11)设M N =,由式(6.11)得到∏∏==--=Nk kjNm m j j de c eA e H 11)()()(ωωω (6.12)在z 平面上,mj c e -ω用一根由零点mc 指向单位圆(ωj e )上任一点B 的向量B c m 表示,同样kj d e -ω用一根由极点kd 指向单位圆(ωje )上任一点B 的向量B d k 来表示,B c m 和Bd k 分别称为零点矢量和极点矢量,用极坐标表示为:m j m m e c B c α=,kj k k e d B d β=。
将B c m 和Bd k 表示式代入式(6.12),得到)(1111)()()()(ωϕωωωωj j N k kNm mNk kjNm mj j e e H BdBcA de ce A e H ==--=∏∏∏∏====∏∏===Nk kNm mj dcA e H 11|)(|ω (6.13)∑∑==-=Nk kNm m 11)(βαωϕ (6.14)系统或者信号的频率特性由式(6.13)和式(6.14)确定。
按照式(6.13),知道零极点的分布后,可以很容易地确定零极点位置对系统特性的影响。