软件看门狗和硬件看门狗
- 格式:doc
- 大小:90.00 KB
- 文档页数:4
看门狗分硬件看门狗和软件看门狗。
硬件看门狗是利用一个定时器电路,其定时输出连接到电路的复位端,程序在一定时间范围内对定时器清零(俗称“喂狗”),因此程序正常工作时,定时器总不能溢出,也就不能产生复位信号。
如果程序出现故障,不在定时周期内复位看门狗,就使得看门狗定时器溢出产生复位信号并重启系统。
软件看门狗原理上一样,只是将硬件电路上的定时器用处理器的内部定时器代替,这样可以简化硬件电路设计,但在可靠性方面不如硬件定时器,比如系统内部定时器自身发生故障就无法检测到。
当然也有通过双定时器相互监视,这不仅加大系统开销,也不能解决全部问题,比如中断系统故障导致定时器中断失效。
看门狗本身不是用来解决系统出现的问题,在调试过程中发现的故障应该要查改设计本身的错误。
加入看门狗目的是对一些程序潜在错误和恶劣环境干扰等因素导致系统死机而在无人干预情况下自动恢复系统正常工作状态。
看门狗也不能完全避免故障造成的损失,毕竟从发现故障到系统复位恢复正常这段时间内怠工。
同时一些系统也需要复位前保护现场数据,重启后恢复现场数据,这可能也需要一笔软硬件的开销。
在单任务系统中看门狗工作原理如上所述,容易实现。
在多任务系统中情况稍为复杂。
假如每个任务都像单任务系统那么做,如图1(a)所示,只要有一个任务正常工作并定期“喂狗”,看门狗定时器就不会溢出。
除非所有的任务都故障,才能使得看门狗定时器溢出而复位,如图1(b)。
而往往我们需要的是只要有一个任务故障,系统就要求复位。
或者选择几个关键的任务接受监视,只要一个任务出问题系统就要求复位,如图2(a)所示,相应的看门狗复位逻辑如图2(b)所示。
在多任务系统中通过创建一个监视任务TaskMonitor,它的优先级高于被监视的任务群Task1、Task2...Taskn。
TaskMonitor在Task1~Taskn正常工作情况下,一定时间内对硬件看门狗定时器清零。
如果被监视任务群有一个Task_x出现故障,TaskMonitor就不对看门狗定时器清零,也就达到被监视任务出现故障时系统自动重启的目的。
nxp看门狗安全机制
看门狗,全称WatchDog Timer,是一种安全机制,用于监视和控制系统的运行状态。
NXP(NXP Semiconductors,前身为Philips Semiconductors)是一家半导体公司,也提供了一些具有看门狗安全机制的芯片和解决方案。
NXP的看门狗安全机制通常包括硬件看门狗和软件看门狗。
硬件看门狗是一种独立的芯片,可以监控系统的运行状态,如果系统出现异常或死机,硬件看门狗会自动重启系统,以恢复系统的正常运行。
软件看门狗则是一种程序,可以在系统运行时监视系统的状态,如果系统出现异常或死机,软件看门狗可以通过发送复位信号或执行特定操作来恢复系统的正常运行。
NXP的看门狗安全机制通常具有以下特点:
1. 可编程性:NXP的看门狗安全机制通常支持可编程控制,用户可以根据自己的需求设置看门狗的超时时间和复位阈值等参数。
2. 灵活性:NXP的看门狗安全机制可以与不同的微控制器或处理器配合使用,以适应不同的应用场景。
3. 可靠性:NXP的看门狗安全机制具有高可靠性和稳定性,可以保证系统的正常运行和安全性。
4. 低功耗:NXP的看门狗安全机制在正常工作时处于低功耗状态,不会对系统造成过多的功耗负担。
总之,NXP的看门狗安全机制是一种可靠的、可编程的、灵活的和低功耗的安全机制,可以用于各种需要系统监控和保护的应用场景。
STM32 看门狗WWDG 和IWDG 的区别是什么STM32 有2 个看门狗:独立看门狗和窗口看门狗。
独立看门狗IWDG:独立于系统之外,因为有独立时钟,所以不受系统影响的系统故障探测器,主要用于监视硬件错误。
窗口看门狗WWDG:系统内部的故障探测器,时钟与系统相同。
如果系统时钟不走了,这个狗也就失去了作用了,主要用于监视软件错误。
简单的讲,看门狗就是检测系统故障的,如果因为系统故障而没有及时喂狗,则引发复位重启。
对于一般的独立看门狗,程序可以在它产生复位前的任意时刻刷新看门狗,但是这样有一个隐患,有可能程序跑乱了又跑回正常的地方,或者跑乱的程序正好执行了刷新看门狗操作,这样的情况下一按的看门狗就检测不出来故障了;但是如果使用窗口看门狗,程序员可以根据程序正常执行的时间设置刷新看门狗的一个时间窗口,保证不会提前刷新看门狗,也不会滞后刷新看门狗,这样可以检测出程序没有按照正常的路径运行,非正常地跳过了某些程序段的情况。
内部与外部看门狗定时器的比较摘要:本文对内部(集成在处理器内部)看门狗定时器(WTD)与外部(基于硬件) WDT的优势和劣势进行了对比。
内部看门狗便于设计,但容易失效。
MAXQ2000微控制器的WDT可以作为内部看门狗的一个例子。
基于硬件的看门狗定时器需要占用额外的电路板空间,但在对于可靠性要求较高的设计中确实不可或缺的。
本文给出了一个对照表,总结了每种WDT方案的优缺点。
引言看门狗定时器(WDT)在出现无效的软件运行状态时用来强行复位(硬件复位)嵌入式微处理器或微控制器,失效状态可以是简单地触发寄存器的某一位,或者是射线干扰或EMI (电磁辐射)。
本文介绍了一些针对具体应用选择最佳定时器的考虑。
WDT的典型应用防止微处理器闭锁是WDT的一个典型应用,通常,嵌入式软件有一个“主循环”程序,用其调用子程序以实现不同的任务。
每次程序循环对WDT进行一次复位,如果任何原因造成程序循环操作失败,看门狗定时器则发生超时,对器件进行复位。
具有WDT功能的系统非常适合检测误码,中断(包括存储器故障,EMI对存储器或接口放电)可能导致临时性的误码。
这些误码会导致处理器输入、输出数据的极性翻转,当误码没引入到程序信息中时,微处理器将会执行错误的代码。
很有可能造成处理器开始执行操作数,而非操作代码。
程序开始执行这种错误代码时,将造成程序运行不正常,无法提供看门狗清零信号,从而导致处理器复位。
合理的系统设计能够在复位后恢复系统的正常运行。
需要注意的是,WDT不能检测瞬态故障,按照定义,只有在WDT计数器达到预定的时间间隔时才会复位处理器。
正是这一原因,需要选择一个最短超时周期,以便在系统失控之前由WDT产生复位,使系统恢复正常工作。
内部和外部WDTWDT可以内置于微处理器,例如:MAXQ2000微控制器;也可以是一个独立的IC (外部WDT),或作为支持ASIC的一部分。
无论是内部WDT,还是外部WDT,各有其优缺点。
看门狗电路的概念和作用2007/08/05 15:26一般看门狗电路用来监视MCU内部程序运行状态,在程序跑飞或死锁情况下,可以自动复位。
不过由于厂家、型号不同可能有些差别。
看门狗电路的工作原理是:当系统工作正常时,CPU将每隔一定时间输出一个脉冲给看门狗,即“喂狗”,若程序运行出现问题或硬件出现故障时而无法按时“喂狗”时,看门狗电路将迫使系统自动复位而重新运行程序。
主要作用是防止程序跑飞或死锁看门狗电路其实是一个独立的定时器,有一个定时器控制寄存器,可以设定时间(开狗),到达时间后要置位(喂狗),如果没有的话,就认为是程序跑飞,就会发出RESET指令在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环,程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片,俗称"看门狗"看门狗电路电路的应用,使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行,这个时候,看门狗电路就会由于得不到单片机送来的信号,便在它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位,即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位.看门狗,又叫 watchdog timer,是一个定时器电路, 一般有一个输入,叫喂狗,一个输出到MCU的RST端,MCU正常工作的时候,每隔一端时间输出一个信号到喂狗端,给 WDT 清零,如果超过规定的时间不喂狗,(一般在程序跑飞时),WDT 定时超过,就回给出一个复位信号到MCU,是MCU复位. 防止MCU死机. 看门狗的作用就是防止程序发生死循环,或者说程序跑飞。
watchdog 解析mg2580看门狗硬件,实现分析1. 看门狗使用的是DW_WDT的看门狗.DW是一个公司的看门狗芯片.此驱动程序实现两个看门狗操作:硬件和软件。
硬件看门狗监控系统在下列情况下将reset.它已经停止响应,或软件看门狗有问题.软件看门狗由用户空间应用程序处理应用程序申请挂起处理.2.如何使用看门狗?(1). 打开/dev/watchdog.(2). 使用IOCTL接口来设置超时。
(3). 指定所需的设置。
(4). 通过IOCTL接口喂狗。
应用程序必须这样做是为了避免触发看门狗。
(5). 关闭/dev/watchdog。
如果软件看门狗关闭,驱动将试图杀死进程的看门狗定时器。
如果驱动程序无法杀死该进程系统将重置。
注意!应特别注意使用时使用,因为该软件看门狗明显的影响重置系统。
3. 加载看门狗看门狗驱动默认加载,如果没有加载,可以手动加载,默认超时时间是17s,两种方法可以改变,一种为:(1). modparam dw_wdt hw_default_heartbeat=XX(XX 为1-17s)(2). echo XX > /proc/driver/watchdog/expires看硬件看门狗超时时间.cat /proc/driver/watchdog/expires看软件和硬件看门狗信息:cat /proc/driver/watchdog/status这个前一个命令: 是硬件看门狗启动,超时为17s,没有启动软件看门狗.后一个命令: 是硬件看门狗启动,超时为17s,启动软件看门狗,进程为1161,超时为10s.系统超时总时间为: 10< watch timer < 10+17 s3. 原理:1.软件看门狗通过定时器实现:当定时器超时,运行,定时器处理函数, 重启或kill 进程.2.硬件的喂狗:写寄存器重新启动WDT计数器。
作为安全措施,值0x76必须写入。
重新启动并且清除WDT的中断。
内部与外部看门狗定时器的比较摘要:本文对内部(集成在处理器内部)看门狗定时器(wtd)与外部(基于硬件)wdt的优势和劣势进行了对比。
内部看门狗便于设计,但容易失效。
maxq2000微控制器的wdt可以作为内部看门狗的一个例子。
基于硬件的看门狗定时器需要占用额外的电路板空间,但在对于可靠性要求较高的设计中确实不可或缺的。
本文给出了一个对照表,总结了每种wdt方案的优缺点。
引言看门狗定时器(wdt)在发生违宪的软件运转状态时用以私自登位(硬件登位)嵌入式微处理器或微控制器,失灵状态可以就是直观地引爆寄存器的某一位,或者就是射线阻碍或emi(电磁辐射)。
本文介绍了一些针对具体应用选择最佳定时器的考虑。
wdt的典型应用领域防止微处理器闭锁是wdt的一个典型应用,通常,嵌入式软件有一个“主循环”程序,用其调用子程序以实现不同的任务。
每次程序循环对wdt进行一次复位,如果任何原因造成程序循环操作失败,看门狗定时器则发生超时,对器件进行复位。
具备wdt功能的系统非常适合检测误码,中断(包含存储器故障,emi对存储器或USB振动)可能将引致临时性的误码。
这些误码可以引致处理器输出、输入数据的极性滑动,当误码没有导入至程序信息中时,微处理器将可以继续执行错误的代码。
很有可能导致处理器已经开始继续执行操作数,而非操作方式代码。
程序已经开始继续执行这种错误代码时,将导致程序运行不正常,无法提供更多看门狗清零信号,从而引致处理器登位。
合理的系统设计能在登位后恢复正常系统的正常运转。
需要注意的是,wdt不能检测瞬态故障,按照定义,只有在wdt计数器达到预定的时间间隔时才会复位处理器。
正是这一原因,需要选择一个最短超时周期,以便在系统失控之前由wdt产生复位,使系统恢复正常工作。
内部和外部wdtwdt可以内置于微处理器,例如:maxq2000微控制器;也可以是一个独立的ic(外部wdt),或作为支持asic的一部分。
无论是内部wdt,还是外部wdt,各有其优缺点。
硬件看门狗原理
硬件看门狗(Hardware Watchdog)是一种用于定时监控系统
运行状态和处理系统故障的硬件设备。
其原理基于一个计时器,该计时器在系统正常运行时持续进行计时,当发生系统故障或死锁情况时,计时器会停止计时并向系统发送复位信号,以使系统重新启动。
具体原理如下:
1. 硬件看门狗通常由一个定时器和一个复位电路组成。
定时器通常是一个计数器,使用一个晶体振荡器作为时钟源,用于精确计时。
2. 在系统正常运行时,软件需要在一个预定的时间间隔内重置看门狗,使其计数被清零,否则看门狗会认为系统出现故障。
3. 如果系统出现故障或软件死锁,导致软件无法及时重置看门狗,看门狗计时器将继续计时并递减计数值。
4. 当看门狗计数值达到或超过预设的阈值时,看门狗将认为系统已崩溃或陷入死锁状态,它会触发复位电路,向系统发送复位信号。
5. 复位信号将导致整个系统重新启动,从而恢复正常运行。
硬件看门狗的存在可以有效防止软件在运行过程中出现异常情况而无法自行恢复的情况,提高系统的稳定性和可靠性。
它常被应用在嵌入式系统、服务器等对系统可靠性要求较高的领域中。
硬压采集卡中旷视安监控软件的特点1.2.1稳定性硬件看门狗确保系统运行安全,死机自动恢复。
软件看门狗:监测监控软件的工作状态,与硬件看门狗结合生效,保护面面俱到。
1.2.2先进性H.264压缩算法,超高压缩比,与以往别的压缩方式相比,在同等画质下占用硬盘空间、更小。
改进的压缩处理,使视频信号干扰造成的录像文件尺寸剧幅增加得到改善。
高清晰录像,录像分辨率达D1(704×576)。
1.2.3网络化网络巡更,监测网络通断情况远程监视、回放全功能的远程设置、控制网络用户授权管理精确,避免非法登录和监视、控制网络巡更时刻监测网络状况网络督察远程查询主机工作状态网络语音广播、对讲智能远程软件升级优化网络传输速度和画质,保证画面质量远程点对点双工传输,互相监视控制强大的网络督察,可以快捷的察看远程主机上的工作状态1.2.4智能化自动监测硬盘坏道全自动上传报警信息分控机接收到主机报警信号自动显示报警画面锁定重要数据,避免循环时覆盖支持短信报警、短信群发(需选配外设)断电后通过接收UPS发出的信号,自动关机,保护硬盘1.2.5人性化联动多画面电子地图,方位更加准确清晰锁定重要数据不被清除录像遮挡,随意调节大小、位置同时支持本地、远程报警盒控制本地、远程矩阵导入、导出设置文件,便于系统恢复,减少工作量查看本地、远程硬盘使用情况主机可以随时了解已连接情况用户管理机制周到健全日志详细清楚,操作设置记录全面直观多路视频同时同步回放回放画面支持剪裁转移,方便存储磁盘分组管理数据资料刻录备份云台速度调整(需解码器支持)移动侦测设置方便,灵敏度感知区任意调整普通功能:视频监视任意开启关闭视频信号丢失报警录像回放多通道同步处理中文摄像机名称标识设置时同步处理音视频信息,同时记录支持报警盒关联录像及报警输出云台镜头通过解码器进行控制监视抓帧,回放抓帧精确同步音频监听视频轮巡切换多种画面分割视频叠加字符自动反白高亮显示定时自动开关机录像工作计划制定及自动实施侦测预录功能,记录报警前5秒钟的录像。
watchdogtimer技术原理在嵌入式系统中,实时时钟(RTC)与看门狗(WatchDog)是两个非常重要的组成部分。
RTC用于提供时间基准和定时功能,而WatchDog则用于系统出现异常情况时的一种保护机制。
今天,我们主要来谈谈看门狗定时器(WatchDogTimer)的基本原理及其在嵌入式系统中的应用。
一、看门狗定时器的基本原理看门狗定时器是一种被动设备,它有一个计数器,当计数溢出时,它会自动复位CPU或者向CPU发送一个中断信号。
如果复位信号没有到达CPU或者CPU没有响应溢出信号,那么这个看门狗定时器就会不断地产生复位信号,导致系统崩溃。
因此,为了防止系统崩溃,我们通常会在程序中设置一个手动复位看门狗定时器的指令,以使系统恢复正常运行。
看门狗定时器可以分为软件看门狗和硬件看门狗两种类型。
软件看门狗通过修改CPU的系统时钟信号来实现其计数功能,硬件看门狗则通过一个独立的定时器芯片来实现其计数功能。
在实际应用中,硬件看门狗更为常见,因为它具有更高的可靠性和稳定性。
二、嵌入式系统中的看门狗定时器嵌入式系统中的看门狗定时器通常被用来保护系统的正常运行。
当系统出现异常情况时,看门狗定时器会自动复位CPU或者向CPU发送一个中断信号,从而避免系统崩溃。
具体来说,嵌入式系统中的看门狗定时器通常有以下几种应用方式:1.嵌入式系统的时钟基准:嵌入式系统的时钟基准通常由RTC和看门狗定时器共同完成。
首先,RTC提供时间基准和定时功能;其次,看门狗定时器用来检测系统是否正常运行。
如果系统出现异常情况,看门狗定时器会自动复位CPU或者向CPU发送一个中断信号,从而保证系统的时钟基准不会出现偏差。
2.嵌入式系统的安全保护:嵌入式系统中的安全保护通常由看门狗定时器和其他的保护机制共同完成。
当系统出现异常情况时,看门狗定时器会自动复位CPU或者向CPU发送一个中断信号,从而避免系统崩溃;同时,其他的保护机制可以用来检测系统的其他异常情况,如电源异常、通信异常等。
看门狗原理
看门狗是一种常见的硬件设备,它通常被用于监控电子设备的运行状态,并在
设备出现故障或死机时进行重启。
看门狗原理是基于定时器和复位电路的工作原理,下面将详细介绍看门狗的工作原理及其应用。
看门狗的工作原理主要包括两部分,定时器和复位电路。
定时器用来监控设备
的运行状态,当设备正常运行时,定时器会不断重置;而当设备出现故障或死机时,定时器将停止重置。
复位电路则负责接收定时器的信号,当定时器停止重置时,复位电路将会触发设备的重启操作,从而使设备恢复正常运行状态。
在实际应用中,看门狗通常被用于嵌入式系统或一些对稳定性要求较高的设备中。
例如,智能家居系统、工业自动化设备、网络路由器等都可能会使用看门狗来确保设备的稳定运行。
当设备出现死机或故障时,看门狗能够及时检测到并进行重启,从而减少系统宕机的时间,提高设备的稳定性和可靠性。
除了硬件看门狗外,软件看门狗也是一种常见的应用方式。
软件看门狗通常是
通过在系统中运行的特定程序来实现的,它与硬件看门狗相似,同样能够监控设备的运行状态,并在需要时进行重启操作。
软件看门狗通常被用于一些对成本要求较高、对稳定性要求不是特别严格的系统中。
总的来说,看门狗原理是通过定时器和复位电路来监控设备的运行状态,并在
设备出现故障或死机时进行重启操作,从而保证设备的稳定性和可靠性。
无论是硬件看门狗还是软件看门狗,它们都在很大程度上提高了设备的稳定性,为各种电子设备的正常运行提供了保障。
STM32单片机的独立看门狗和窗口看门狗的特点及用法解析1.看门狗介绍看门狗这东西虽然简单,但我相信绝大多程序员没有足够重视它。
使用看门狗保证系统正常地运行是非常有必要的。
我们在设计产品时,代码以及硬件设计缺陷或是外界电磁干扰都有可能使系统死机,如果不能正常对其进行复位,系统的可靠性将大打折扣。
看门狗分为软件看门狗和硬件看门狗两类,其原理都是使用一个独立定时器来计时,超出时间就会产生复位信号,主要区别看是否具有独立的硬件结构,如果有,就是硬件看门狗,如果是一个普通定时器实现的那么就是软件看门狗。
STM32F407片内有两个看门狗:独立看门狗IWDG以及窗口看门狗WWDG,下面来讨论各自的特点和用法。
2.IWDG的特点以及使用IWDG是一个独立看门狗,具有独立于系统的时钟,与片外看门狗更为相似,使用片内独立的阻容时钟发生电路计时,记录时间为=(时钟频率(40KHz)/ 分频数)*IWDG_SetReload (t),t《0xFFF.也就是说记录的最大设定的复位时间为(1/40K)*256*0xFFF = 26.2 S。
由于IWDG使用的时钟本身不准确,会因为漂移产生一定变化,喂狗时应该给出一定的裕量。
另外,这个时钟与系统时钟并无关联,所有也不能与系统进行同步产生中断,一旦定时时间到后就会产生复位信号,系统来不及存储当前运行状态就会重启,可以在要求不高的场合使用。
3.WWDG的特点以及使用WWDG具有一个独立的7位定时器,使用系统时钟,可以产生系统中断。
其定时最时间为(1/PCLK1)* 4096)* 分频系数(最大为8)*(0x7F –0x3F)= 58ms.其复位的条件是:(1)当计数器的数值从0x40减到0x3F(2)当刷新看门狗时计数器的数值大于窗口上限值时满足任何一条都可以产生复位信号。
通常情况下设置窗口上限值为0x7F,下限值默认为0x40,计数器向下数到0x40就会产生中断,下个910us后变为0x3F就会复位系统。
本文由我司收集整编,推荐下载,如有疑问,请与我司联系linux 内核笔记之watchdog2017/04/26 850 watchdog 简而言之,watchdog是为了保证系统正常运行,或者从死循环,死锁等一场状态退出的一种机制。
看门狗分硬件看门狗和软件看门狗。
硬件看门狗是利用一个定时器电路,其定时输出连接到电路的复位端,程序在一定时间范围内对定时器清零(俗称“喂狗”),因此程序正常工作时,定时器总不能溢出,也就不能产生复位信号。
如果程序出现故障,不在定时周期内复位看门狗,就使得看门狗定时器溢出产生复位信号并重启系统。
软件看门狗原理上一样,只是将硬件电路上的定时器用处理器的内部定时器代替,这样可以简化硬件电路设计,但在可靠性方面不如硬件定时器,比如系统内部定时器自身发生故障就无法检测到。
软件看门狗分为两种,用于检测soft lockup的普通软狗(基于时钟中断),以及检测hard lockup的NMI狗(基于NMI中断)。
注1:时钟中断优先级小于NMI中断注2:lockup,是指某段内核代码占着CPU不放。
Lockup严重的情况下会导致整个系统失去响应。
soft lockup 和hard lockup,它们的唯一区别是hard lockup 发生在CPU屏蔽中断的情况下。
单个cpu检测线程是否正常调度。
一般软狗的正常流程如下(假设软狗触发的时间为20s) 可能产生软狗的原因: 1.频繁处理硬中断以至于没有时间正常调度 2.长期处理软中断 3.对于非抢占式内核,某个线程长时间执行而不触发调度 4.以上all NMI watchdog 单个CPU检测中断是否能够正常上报当CPU处于关中断状态达到一定时间会被判定进入hard lockup NMI检测流程: 可能产生NMI狗的原因:1.长期处理某个硬中断2.长时间在禁用本地中断下处理。
看门狗,又叫 watchdog timer,是一个定时器电路,一般有一个输入,叫喂狗,一个输出到MCU的RST端,MCU正常工作的时候,每隔一端时间输出一个信号到喂狗端,给 WDT清零,如果超过规定的时间不喂狗,(一般在程序跑飞时),WDT定时超过,就回给出一个复位信号到MCU,是MCU复位.防止MCU死机.看门狗的作用就是防止程序发生死循环,或者说程序跑飞。
工作原理:在系统运行以后也就启动了看门狗的计数器,看门狗就开始自动计数,如果到了一定的时间还不去清看门狗,那么看门狗计数器就会溢出从而引起看门狗中断,造成系统复位。
所以在使用有看门狗的芯片时要注意清看门狗。
硬件看门狗是利用了一个定时器,来监控主程序的运行,也就是说在主程序的运行过程中,我们要在定时时间到之前对定时器进行复位如果出现死循环,或者说PC指针不能回来。
那么定时时间到后就会使单片机复位。
常用的WDT芯片如MAX813 ,5045, IMP 813等,价格4~10元不等.软件看门狗技术的原理和这差不多,只不过是用软件的方法实现,我们还是以51系列来讲,我们知道在51单片机中有两个定时器,我们就可以用这两个定时器来对主程序的运行进行监控。
我们可以对T0设定一定的定时时间,当产生定时中断的时候对一个变量进行赋值,而这个变量在主程序运行的开始已经有了一个初值,在这里我们要设定的定时值要小于主程序的运行时间,这样在主程序的尾部对变量的值进行判断,如果值发生了预期的变化,就说明T0中断正常,如果没有发生变化则使程序复位。
对于T1我们用来监控主程序的运行,我们给T1设定一定的定时时间,在主程序中对其进行复位,如果不能在一定的时间里对其进行复位,T1的定时中断就会使单片机复位。
在这里T1的定时时间要设的大于主程序的运行时间,给主程序留有一定的的裕量。
而T1的中断正常与否我们再由T0定时中断子程序来监视。
这样就够成了一个循环,T0监视T1,T1监视主程序,主程序又来监视T0,从而保证系统的稳定运行。
看门狗原理
看门狗(Watchdog)原理是一种计算机软件或硬件的保护机制,用来在发生软件或硬件故障时重新启动系统或某个应用程序,而不需要人工处理。
看门狗(Watchdog)原理具有检测功能以及处理功能,可以在系统检测到某种异常情况时采取合适的处理措施,避免造成进一步损害。
看门狗原理在类型上可分为硬件看门狗(HardwareWatchdog)和软件看门狗(SoftwareWatchdog),硬件看门狗是系统硬件板上安装的一种独立模块,而软件看门狗则是操作系统或应用程序中实现的一种保护机制。
硬件看门狗的工作原理主要是采用一个独立的定时计数器来控
制系统中的动作时间,如果一段时间内没有收到来自处理器的某种信号,即认为处理器出现异常,立即重新启动系统。
软件看门狗的工作原理和硬件看门狗相似,也是运行在系统中的一种独立服务,其主要功能是检测系统的运行情况,如果发现系统或某个程序或数据处理器出现错误,就会进行重新启动。
软件看门狗的优点是能够根据不同的需求,进行定制的设置,可以更好的满足不同的需求,而且不需要考虑硬件看门狗的空间限制。
看门狗原理是一种有效的系统保护机制,它能够及时发现系统故障,采取相应的处理措施,防止系统崩溃,损坏数据,从而节省人力物力投入和时间成本,让系统更加安全可靠,降低用户的风险。
- 1 -。
看门狗分硬件看门狗和软件看门狗。
硬件看门狗是利用一个定时器电路,其定时输出连接到电路的复位端,程序在一定时间范围内对定时器清零(俗称“喂狗”),因此程序正常工作时,定时器总不能溢出,也就不能产生复位信号。
如果程序出现故障,不在定时周期内复位看门狗,就使得看门狗定时器溢出产生复位信号并重启系统。
软件看门狗原理上一样,只是将硬件电路上的定时器用处理器的内部定时器代替,这样可以简化硬件电路设计,但在可靠性方面不如硬件定时器,比如系统内部定时器自身发生故障就无法检测到。
当然也有通过双定时器相互监视,这不仅加大系统开销,也不能解决全部问题,比如中断系统故障导致定时器中断失效。
看门狗本身不是用来解决系统出现的问题,在调试过程中发现的故障应该要查改设计本身的错误。
加入看门狗目的是对一些程序潜在错误和恶劣环境干扰等因素导致系统死机而在无人干预情况下自动恢复系统正常工作状态。
看门狗也不能完全避免故障造成的损失,毕竟从发现故障到系统复位恢复正常这段时间内怠工。
同时一些系统也需要复位前保护现场数据,重启后恢复现场数据,这可能也需要一笔软硬件的开销。
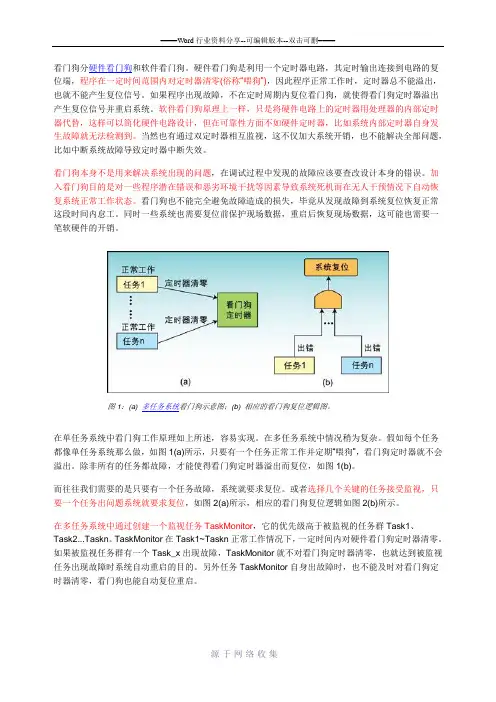
图1:(a) 多任务系统看门狗示意图;(b) 相应的看门狗复位逻辑图。
在单任务系统中看门狗工作原理如上所述,容易实现。
在多任务系统中情况稍为复杂。
假如每个任务都像单任务系统那么做,如图1(a)所示,只要有一个任务正常工作并定期“喂狗”,看门狗定时器就不会溢出。
除非所有的任务都故障,才能使得看门狗定时器溢出而复位,如图1(b)。
而往往我们需要的是只要有一个任务故障,系统就要求复位。
或者选择几个关键的任务接受监视,只要一个任务出问题系统就要求复位,如图2(a)所示,相应的看门狗复位逻辑如图2(b)所示。
在多任务系统中通过创建一个监视任务TaskMonitor,它的优先级高于被监视的任务群Task1、Task2...Taskn。
TaskMonitor在Task1~Taskn正常工作情况下,一定时间内对硬件看门狗定时器清零。
如果被监视任务群有一个Task_x出现故障,TaskMonitor就不对看门狗定时器清零,也就达到被监视任务出现故障时系统自动重启的目的。
另外任务TaskMonitor自身出故障时,也不能及时对看门狗定时器清零,看门狗也能自动复位重启。
图2:(a) 多任务系统看门狗示意图;(b) 正确的看门狗复位逻辑图。
接下来需要解决一个问题是:监视任务如何有效监视被监视的任务群。
在TaskMonitor中定义一组结构体来模拟看门狗定时器组,
typedef struct
{
UINT32 CurCnt, LastCnt;
BOOL RunState;
int taskID;
} STRUCT_WATCH_DOG;
该结构体包括被监视的任务号taskID,用来模拟“喂狗”的变量CurCnt、LastCnt(具体含义见下文),看门狗状态标志RunState用来控制当前任务是否接受监视。
被监视的任务Task1~Taskn调用自定义函数CreateWatchDog(int taskid)来创建看门狗,被监视任务一段时间内要求“喂狗”,调用ResetWatchDog(int taskid),这个“喂狗”动作实质就是对看门狗定时器结构体中的变量CurCnt加1操作。
TaskMonitor大部分时间处于延时状态,假设硬件看门狗定时是2秒,监视任务可以延时1.5秒,接着对创建的看门狗定时器组一一检验,延时前保存CurCnt的当前值到LastCnt,延时后比较CurCnt与LastCnt是否相等,都不相等系统才是正常的。
需要注意的是CurCnt和LastCnt数据字节数太小,而“喂狗”过于频繁,可能出现CurCnt加1操作达到一个循环而与LastCnt相等。
如果有任意一组的CurCnt等于LastCnt,认为对应接受监视的任务没有“喂狗”动作,也就检测到该任务出现故障需要重启,这时候TaskMonitor不对硬件看门狗定时器清零,或者延时很长的时间,比如10秒,足以使得系统重启。
反之,系统正常,Task1~Taskn定期对TaskMonitor“喂狗”,TaskMonitor又定期对硬件看门狗“喂狗”,系统就得不到复位。
还有一点,被监视任务可以通过调用PauseWatchDog(int taskid)来取消对应的看门狗,实际上就是对STRUCT_WATCH_DOG结构体中的RunState操作,该标志体现看门狗有效与否。
这种方式可监视的最大任务数由STRUCT_WATCH_DOG结构数据的个数决定。
程序中应该有一个变量记录当前已创建的看门狗数,判断被监视任务Task1~Taskn是否“喂狗”只需比较CurCnt与LastCnt的值n次。
图3:系统复位逻辑图。
硬件看门狗监视TaskMonitor任务,TaskMonitor任务又监视其他的被监视任务
Task1~Taskn,形成这样一种链条。
这种方式系统的故障图表示如图3所示。
被监视任务Task1~Taskn及TaskMonitor都是或的关系,因此被监视的任一任务发生故障,硬件电路看门狗就能复位。
为实现多任务系统的看门狗监视功能额外增加了TaskMonitor任务,这个任务占用执行时间多少也是一个重要问题。
假设TaskMonitor任务一个监视周期延时1.5秒,此外需要执行保存当前计数值,判断是否“喂狗”等语句,它的CPU占用时间是很小的。
用一个具体的试验证实,使用50M工作频率的CPU(S3C4510),移植vxWorks操作系统,cache不使能条件下监视10个任务,每个监视周期占用220~240微秒。
可见该任务绝大多数时间都处于任务延时状态。
被监视任务可能有获取消息、等待一个信号量等的语句,往往这个消息、信号量的等待是无限期的等待。
这就需要将这类语句作一些修改。
比如在vxWorks中将一次无期限的获取信号量操作
semTake(semID, WAIT_FOREVER); // WAIT_FOREVER为无限时间等待
分解为
do
{
ResetWatchDog; // “喂狗”操作
}while(semTake(semID, sysClkRateGet( )) != OK); // 1s内的等待信号量操作
多次的时间范围内的获取信号量操作,这样才能保证及时“喂狗”。
另外需要注意的是系统中是否有的任务优先级比TaskMonitor高并且长时间处于执行状态,TaskMonitor长时间得不到调度,使得看门狗错误复位。
良好的任务划分,配置是不应该出现这种高优先级任务长期执行状况的。