步进电动机及其控制
- 格式:ppt
- 大小:4.64 MB
- 文档页数:1234
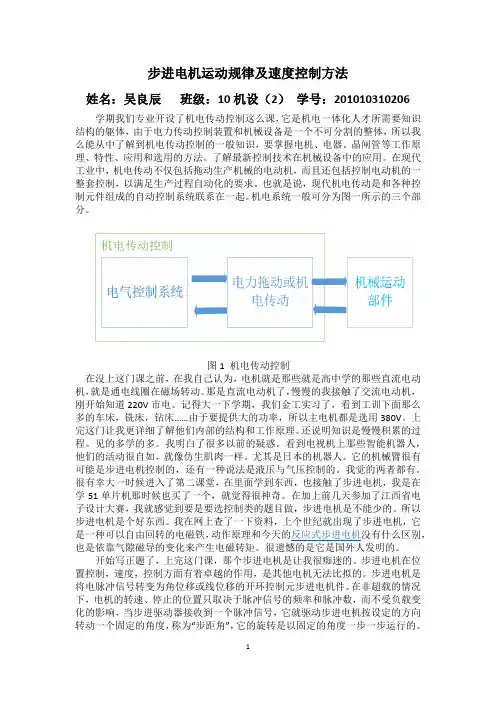
步进电机运动规律及速度控制方法姓名:吴良辰班级:10机设(2)学号:201010310206学期我们专业开设了机电传动控制这么课,它是机电一体化人才所需要知识结构的躯体,由于电力传动控制装置和机械设备是一个不可分割的整体,所以我么能从中了解到机电传动控制的一般知识,要掌握电机、电器、晶闸管等工作原理、特性、应用和选用的方法。
了解最新控制技术在机械设备中的应用。
在现代工业中,机电传动不仅包括拖动生产机械的电动机,而且还包括控制电动机的一整套控制,以满足生产过程自动化的要求。
也就是说,现代机电传动是和各种控制元件组成的自动控制系统联系在一起。
机电系统一般可分为图一所示的三个部分。
图1 机电传动控制在没上这门课之前,在我自己认为,电机就是那些就是高中学的那些直流电动机,就是通电线圈在磁场转动。
那是直流电动机了,慢慢的我接触了交流电动机,刚开始知道220V市电。
记得大一下学期,我们金工实习了,看到工训下面那么多的车床,铣床,钻床……由于要提供大的功率,所以主电机都是选用380V。
上完这门让我更详细了解他们内部的结构和工作原理。
还说明知识是慢慢积累的过程。
见的多学的多。
我明白了很多以前的疑惑。
看到电视机上那些智能机器人,他们的活动很自如,就像仿生肌肉一样。
尤其是日本的机器人。
它的机械臂很有可能是步进电机控制的,还有一种说法是液压与气压控制的。
我觉的两者都有。
很有幸大一时候进入了第二课堂,在里面学到东西,也接触了步进电机,我是在学51单片机那时候也买了一个,就觉得很神奇。
在加上前几天参加了江西省电子设计大赛,我就感觉到要是要选控制类的题目做,步进电机是不能少的。
所以步进电机是个好东西。
我在网上查了一下资料,上个世纪就出现了步进电机,它是一种可以自由回转的电磁铁,动作原理和今天的反应式步进电机没有什么区别,也是依靠气隙磁导的变化来产生电磁转矩。
很遗憾的是它是国外人发明的。
开始写正题了,上完这门课,那个步进电机是让我很痴迷的。


步进电机控制步进电动机一、步进电动机的组成和种类二、步进电动机的工作原理2.1.1B'B'C'C'这种工作方式下这种工作方式下,,三个绕组依次通电一次为一个循环周期个循环周期,,一个循环周期包括三个工作脉冲一个循环周期包括三个工作脉冲,,所以称为三相单三拍工作方式以称为三相单三拍工作方式。
按A →B →C →A →……的顺序给三相绕组轮流通电轮流通电,,转子便一步一步转动起来转子便一步一步转动起来。
每一拍转过30°(步距角步距角)),每个通电循环周期每个通电循环周期(3(3(3拍拍)转过90°(一个齿距角一个齿距角))。
2.1 2.1 步进电动机步进电动机步进电动机结构与工作原理结构与工作原理2.1.2 三相六拍按A →AB →B →BC →C →CA 的顺序给三相绕组轮流通电序给三相绕组轮流通电。
这种方式可以获得更精确的控制特性获得更精确的控制特性。
4123齿与A、A' 对齐对齐。
对齐,,又转324齿与B、B´对齐三相反应式步进电动机的一个通电循环周期如下期如下::A →AB →B →BC →C →CA ,每个循环周期分为六拍环周期分为六拍。
每拍转子转过15°(步距角步距角),),),一一个通电循环周期环周期((6拍)转子转过90°(齿距角齿距角))。
与单三拍相比与单三拍相比,,六拍驱动方式的步进角更小,更适用于需要精确定位的控制系统中更适用于需要精确定位的控制系统中。
2.1.3 三相双三拍按AB→BC→CA的顺序给三相绕组轮流通每拍有两相绕组同时通电。
电。
每拍有两相绕组同时通电。
B'C'B'C'B'C'360°电机转动的电机转动的工作原理演示工作原理演示总结总结::错齿是步进电动机旋转的根本原因齿距角是齿距角是99°;定子仍是6个磁极个磁极,,但每个磁极表面加工有五个和转子一样的齿面加工有五个和转子一样的齿。
步进电机控制方法
步进电机是一种常用的电动机,它通过控制电流脉冲的频率和方向来实现旋转运动。
下面将介绍几种常见的步进电机控制方法。
1. 单脉冲控制:这种方法简单直接,通过给步进电机施加一个脉冲信号来控制其步进角度,每个脉冲代表一个步进角度。
但是由于只控制脉冲的频率和方向,无法准确控制电机的位置。
2. 双脉冲控制:这种方法在单脉冲控制的基础上,加入了一个脉冲信号来标记零点位置。
通过控制脉冲信号的频率和方向,可以实现步进电机的精准定位。
但是双脉冲控制需要额外的硬件电路支持,复杂性较高。
3. 微步进控制:微步进控制是一种更加精细的步进电机控制方法。
它通过改变脉冲信号的宽度和相位来控制电机的旋转角度,可以实现更高的分辨率和平滑的运动。
但是微步进控制需要更复杂的电路和算法支持。
除了以上几种常见的步进电机控制方法外,还有其他的一些高级控制方法,如闭环控制、矢量控制等,用于实现更精确的控制效果。
具体选择哪种控制方法,可以根据实际应用需求和成本考虑。
步进电机的控制原理及应用引言步进电机是一种常见的电动机,具有精准定位、高速运动和高力矩输出的特点,在工业自动化、机器人技术、医疗器械等领域广泛应用。
本文将介绍步进电机的控制原理和应用。
步进电机控制原理步进电机是一种以固定角度步进运动的电动机,通过电流的施加和极性的反转来实现转子的精确位置控制。
其控制原理主要包括以下几点:1.步进角度:步进电机每次转动的角度是固定的,通常为1.8度或0.9度。
这是由电机内部的磁极分布决定的。
2.极数:步进电机的极数决定了每转动一周所需的电脉冲数。
极数越高,分辨率越高,但也增加了控制的复杂性。
3.电流驱动:步进电机通常需要使用驱动器来提供足够的电流。
驱动器根据输入的脉冲信号来控制电机的转动。
4.脉冲信号:步进电机的控制信号是一系列的脉冲信号,每个脉冲信号引发电机转动一个步进角度。
脉冲信号的频率和方向决定了电机的运动速度和方向。
步进电机的应用步进电机由于其独特的控制方式和优越的性能,在许多领域得到广泛应用。
以下是步进电机的几个主要应用领域:1.机床和自动化设备:步进电机被广泛用于机床和自动化设备中,如数控机床、自动包装机等。
其精确的定位和高速运动能力使其成为自动化生产线中不可或缺的一部分。
2.机器人技术:步进电机在机器人技术中扮演着重要角色。
机器人需要精准的定位和精确的运动控制,步进电机正好满足需求。
步进电机广泛应用于机器人臂、机器人关节和机器人末端执行器等部分。
3.医疗器械:步进电机在医疗器械领域的应用也很广泛,如医疗机器人、手术器械等。
步进电机的高精度定位和稳定性能保证了医疗器械的安全和可靠性。
4.3D打印机:步进电机在3D打印机中是关键组件之一。
通过控制步进电机的运动,可以实现精确的3D打印效果。
步进电机的精准定位能力保证了打印的精度和准确性。
5.汽车行业:步进电机广泛应用于汽车行业中的汽车座椅调节、车窗升降、车内电子设备控制等方面。
步进电机的高力矩和精确控制保证了相关设备的可靠性和稳定性。
步进电机控制方法详解
步进电机是一种电动机,能够将电脉冲转换为机械位移,具有精准定位、无需传感器反馈等优点,在许多行业中得到广泛应用。
步进电机的控制方法多种多样,包括开环控制和闭环控制两种基本方式。
1. 开环控制
开环控制是最简单直接的步进电机控制方法之一。
通过控制每次输入的脉冲数量和频率来控制电机旋转的角度和速度。
开环控制不需要反馈系统,因此结构简单、成本低廉,适用于一些简单的应用场景。
但是开环控制无法实时纠正误差,容易受到外部因素干扰,精度相对较低。
2. 步进电机控制方法详解
在现代步进电机应用中,闭环控制方式更为常见。
闭环控制通过在电机上添加编码器或传感器,实时监测电机的位置、速度和加速度等参数,将这些信息反馈给控制系统,从而动态调整控制电流和脉冲信号,确保电机的运动精准稳定。
闭环控制能够有效消除误差和震动,提高系统的响应速度和稳定性,适用于对精度要求较高的场合。
3. 如何选择合适的控制方法
在选择步进电机控制方法时,需要根据具体应用场景和要求来进行判断:
•如果是一些简单的定位任务,对精度要求不高,可以选择开环控制方法,简单易行。
•如果是需要高精度、高速度的精密定位任务,或是需要长时间稳定运行的场合,建议选择闭环控制方式,确保系统的稳定性和可靠性。
综上所述,步进电机的控制方法多种多样,开环控制和闭环控制各有优劣。
在实际应用中,应根据具体需求来选择合适的控制方式,以达到最佳的控制效果。
步进电机作
为一种重要的执行元件,在自动化控制系统中具有重要的地位和作用,不断推动着工业自动化技术的发展。
步进电机的精确控制方法研究步进电机是一种将脉冲输入转化为旋转运动的电动机。
它具有精确位置控制的优势,广泛应用于数控机床、印刷设备、纺织设备等领域。
本文将研究步进电机的精确控制方法。
首先,步进电机的精确控制方法可以从两个方面入手:开环控制和闭环控制。
开环控制是指通过给定脉冲数控制步进电机的旋转角度,但无法实时检测和修正位置偏差。
闭环控制则通过添加位置传感器和反馈控制系统,实现对步进电机的精确位置控制。
在开环控制方法中,可以使用以下几种策略来提高步进电机的精确度:1.采用高分辨率的脉冲信号:通过提高脉冲信号的分辨率,可以使步进电机的旋转角度更加精确。
2.采用微步驱动技术:微步驱动技术可以将一个脉冲细分为多个微步,从而实现对步进电机更加精细的控制。
常见的微步驱动技术有1/2步、1/4步和1/8步等。
3.降低负载惯性:负载惯性对步进电机的转动精度有很大影响。
通过减小负载惯性,可以提高步进电机的转动精度。
而闭环控制方法则通过反馈控制系统对步进电机的位置进行实时监测和修正,从而实现更加精确的位置控制。
闭环控制方法可以采用以下几种方式:1.采用位置传感器:可以使用编码器或霍尔传感器等位置传感器来实时监测步进电机的转动角度,从而获得实际位置与期望位置之间的误差。
2.使用PID控制算法:PID控制算法是一种常用的闭环控制算法,通过调节比例、积分和微分三个参数,可以快速、稳定地修正步进电机的位置偏差。
3.采用模型预测控制(MPC):模型预测控制是一种优化控制算法,通过建立步进电机的数学模型,预测未来的位置偏差,并采取相应的控制策略来修正偏差。
总之,步进电机的精确控制方法可以通过开环控制和闭环控制两种方式实现。
开环控制方法适用于对精度要求不高的应用场景,而闭环控制方法则适用于对位置精度要求较高的场景。
根据具体应用需求,可以选择合适的控制方法来实现步进电机的精确控制。
步进电机的转速控制方法
步进电机是一种常见的电动机类型,广泛应用于数码打印机、机床、自动化设备等领域。
对于步进电机的转速控制,有以下几种常见的方法:
1. 定时脉冲控制方法:这是最基本的控制方法。
通过控制脉冲信号的频率和占空比来控制步进电机的转速。
提高脉冲频率可加快转速,而改变占空比则可调节转速。
2. 微步驱动控制方法:与定时脉冲控制方法相比,微步驱动控制方法能够实现更细腻的转速控制。
通过在控制信号中加入多个微步信号,可以使步进电机每转动一个脉冲角度时细分为更小的角度,从而实现更加精确的转速控制。
3. 闭环控制方法:闭环控制方法通过在步进电机系统中添加编码器或位置传感器等反馈装置,实时监测步进电机的位置,并与期望位置进行比较,通过调整驱动信号来控制步进电机的转速。
闭环控制方法可以更加精确地控制转速,并在负载变化时实现自适应调整。
4. 软件控制方法:通过控制步进电机驱动器上的软件或编程方式,实现转速的控制。
例如,使用PLC(可编程逻辑控制器)或单片机编程,通过改变输出信号来控制步进电机的转速。
需要注意的是,步进电机的最大转速与驱动器的工作电压、负载情况、驱动电流等因素有关,因此在实际应用中需要综合考虑这些因素,并选择合适的转速控制方法来满足实际需求。
第一章步进电机控制原理步进电机是一种将电脉冲信号变换成角位移或直线位移的常用电气执行元件,具有步进数可控、运行平稳、价格便宜等优点。
步进电机转子的位移与脉冲数成正比,因而其转速与脉冲频率成正比,而不受电源电压、负载大小及环境条件等影响。
每一个脉冲信号可使步进电机旋转一个固定的角度前进一步,这个角度即为步距角。
脉冲的数量决定了旋转的总角度,脉冲的频率决定了旋转的速度,方向信号决定了旋转的方向。
步进电机的工作方式与电动机的结构和种类密切相关,从结构上看,步进电机分为三相、四相、五相等类型,常用的是三相步进电机。
三相步进电机的工作方式有三相单三拍、三相双三拍和三相六拍3种。
系统采用三相六拍工作方式,在=三相六拍工作方式中,控制电流切换6次,磁场旋转1周,转子移动1个齿距,各相的通电顺序为:A—AB.B-BC.C.CA—A。
六拍工作方式时的电压及电流波形如图1所示。
其中细线表示磁极绕组中的电流波形,可见磁极的驱动电压是方波,而电流不是方波,这主要是由于步进电机的每相绕组存在一定的充电和放电时间。
图1 三相感应式步进电机六拍工作方式时的电压及电流波形常用的步进电机分为反应式步进电机、永磁式步进电机、混合式步进电机和单相式步进电机等类型,不同的步进电机在控制方式上基本一样。
在实际应用中,反应式步进电机较常用。
步进电机直接由数字信号控制,其基本控制包括转向控制和速度控制。
步进电机换向,一定要在电机降速停止或降到突跳频率范围之内时,以免产生较大的冲击而损坏电机。
换向信号一定要在前一个方向的最后一个脉冲结束后以及下一个方向的第1个脉冲前发出。
在某一高速下的正、反向切换实质包含了降速一换向一加速3个过程。
调整送给步进电机的脉冲频率,就可以对步进电机进行调速。
用PLC实现步进电机的加减速控制,实际上就是控制发送脉冲的频率。
加速时,使脉冲频率增高,减速时降低。
理想的加速曲线一般为指数曲线,步进电机整个降速过程的频率变化规律是整个加速过程频率变化规律的逆过程。