CRP焊机数字通讯功能使用说明书(麦格米特)(CRP卡)V1.0
- 格式:docx
- 大小:3.97 MB
- 文档页数:17
CRP寻位功能说明1.功能简介:在寻位模式下,工件接地,通过喷嘴或焊丝通低压电。
当机器人沿寻位轨迹移动过程中,喷嘴或焊丝和工件接触时,电平被拉低,会产生接触信号,机器人停止移动,并记录接触工件时的位置数据。
利用当前位置与程序设定位置的偏差值对路径进行修正,从而得出真实目标位置。
1.1:寻位注意事项:●工件表面须没有铁锈、氧化层、油漆或其他绝缘的涂层●寻位前必须进行和剪丝处理,保证焊丝杆伸长度一致。
●使用水冷焊枪的时候,建议使用蒸馏水或其他不导电的冷却液。
不纯净的水(如含盐矿物水)会降低寻位的灵敏度或降低寻位电压。
●寻点的顺序不能乱(如3D+,首先在x.y.z任意一个变化的方向上的3点组成面,然后再在另外一个方向上面寻2个点组成线,再在最后一个方向上取一个点)。
1.2:寻位方式包含:简易,V口,角焊缝,内外径,相机,点,面。
1.3:寻位类型包含:3D+旋转,2D+旋转,2D,1D+1旋转,1D+2旋转,1D。
详见《5.功能详解》。
1.4:寻位前对机器人的要求:a.机器人精度。
机器人精度尽可能高,机器人定位精度越高,寻位精度越好。
b.校验好工具坐标系。
TCP精度越高,精度越好。
(建议使用本公司20点标定法,标定出来的误差越小越好,误差若大于2.00,则精度不敢保证,寻位过程中需要把工具坐标带上)c.寻位速度。
速度越快,接触工件越容易引起焊丝变形,误差越大。
速度越慢,误差越小,效率越低。
本系统IO信号需要20MS时间确认位置。
例:5MM/S速度, 20MS时间对应误差0.1MM。
D.寻位动作。
指令行只能使用MOVL,需要先指定一个寻位准备点,再定义一个寻位开始点。
从准备点到开始点这条直线反向就是寻位方向。
2.硬件连接及PLC编程辅助继电器说明:M184 :寻位使能,切换寻位状态,输出。
如下PLC对应Y00M183 :寻位检测信号,检测寻位接触点,输入。
如下PLC对应X00PLC编辑如下:硬件连接:焊接模拟方式。


CRP电弧跟踪器调试说明
1 软件升级:将压缩包内的文件解压后,文件夹内的文件放在U盘根目录中,插入控制器USB接口升级:
2 升级完重启后,验证是否升级成功,软件版本为:
3连接电弧跟踪器穿过焊机到系统
4 连接电弧跟踪器到系统,将通讯线头插入系统COM2端口,并固定;并连接电源(220V)
5 在系统界面配置端口:用户工艺→弧焊工艺→电弧跟踪→通讯设置
选择对应的COM口
6在:用户工艺→弧焊工艺→电弧跟踪→参数设置中设置补偿参数:
点击下一页
注:该页的内容可以不管,直接置为OFF
注:左右补偿灵敏度可以适当调节,有超调现象(如走S形时),可以将其调低。
如果跟踪补偿缓慢时,可以将其调大。
7 编写电弧跟踪程序:
8 确认连接无误后,在通讯设置中打开后台记录,然后运行程序
9 文件操作→文件保存到U盘→一键备份系统然后导入到电脑中
10在路径:\\Robot\\file\\History中找到下面三个TXT文件:电流数据、缓冲区状况、计算后偏移量:
11 打开电流数据(以下的图片都是通讯正常的情况下)
打开缓冲区状况
打开计算后偏移量:(因为没有连接焊机所以为0)
12 如果没有数据或者数据不正常(即通讯不成功时,可以用串口调试助手进行通讯测试):
拿掉485转232的转换头
将485转USB的线连接好再连接电脑USB接口,将电弧传感器电源通电
13 打开串口调试助手:
选择串口号,配置好波特率、数据位、停止位(分别为115200、8、1)然后选中HEX发送,在发送栏中输入aa 55;点击发送、HEX显示,返回数据如图所示,即通讯正常。
请检查其他接线有误错误
2017-4-12 CRP WYM。

CRP-S40、S80简要使用手册CRP-S40、S80使用说明书CRP-S40系统硬件说明书CRP-S80系统硬件说明书CRP-S40 PLC说明书CRP-S80 PLC说明书CRP-S40、S80调试手册CRP-S40、S80焊接工艺说明书CRP-S40、S80码垛工艺说明书CRP-S40、S80视觉功能说明书CRP-S40、S80预约工艺说明书CRP-S40、S80跟踪工艺说明书成都卡诺普自动化控制技术有限公司请确保相关说明书到达本产品的最终使用者手中。
本系统支持多种机器人类型,本手册仅以六关节机器人为例做了部分介绍。
对于其他类型机器人,请参考本手册和调试手册使用。
CRP-JYSC-2014-001其他说明参考I Your needs ,We have安全注意事项安全注意事项使用本系统前,请务必熟读并全部掌握本说明书和其他附属资料,在熟知全部设备知识、安全知识及注意事项后再开始使用。
本说明书中的安全注意事项分为“危险”、“注意”、“强制”、“禁止”四类分别记载。
误操作时有危险,可能发生死亡或重伤事故。
误操作时有危险,可能发生中等程度伤害或轻伤事故及设备故障。
必须遵守的事项。
禁止的事项。
需要说明的,即使是“注意”所记载的内容,也会因情况不同而产生严重后果,因此任何一条注意事项都极为重要,请务必严格遵守。
甚至在有些地方就连“注意”或“危险”等内容都未记载,也是用户必须严格遵守的事项。
返回目录安全注意事项★解除急停后再接通伺服电源时,要解除造成急停的事故后再接通伺服电源。
由于误操作造成的机器人动作,可能引发人身伤害事故。
★在机器人动作范围内示教时,请遵守以下原则:考虑机器人突然向自己所处方位运动时的应变方案。
确保设置躲避场所,以防万一。
由于误操作造成的机器人动作,可能引发人身伤害事故。
II Your needs,We have返回目录IIIYour needs ,We have安全注意事项返回目录IVYour needs,We have安全注意事项返回目录I Your needs ,We have目录目录安全注意事项���������������������������I 1 准备工作 ���������������������������11.1 机械正常 ������������������������������11.2 伺服正常 ������������������������������11.3 系统正常 ������������������������������11.4 参数设置合理 ����������������������������11.5 IO接线和PLC正常 ��������������������������12 系统按键,界面介绍 ����������������������22.1 系统按键介绍 ����������������������������22.1.1 急停按钮 ����������������������������32.1.2 模式选择开关 ��������������������������32.1.3 安全开关 ����������������������������42.1.4 电子手轮 ����������������������������42.2 界面介绍 ������������������������������43 手动各个关节和坐标 ����������������������53.1 示教盒正确操作姿势 �������������������������52.2 手动各个关节和坐标 �������������������������64 编写程序试运行 ������������������������84.1 示教编程步骤 ����������������������������84.2 实例程序试运行 ��������������������������114.2.1 准备工作: ��������������������������113.2.2 程序试运行 ��������������������������115 程序运行 ��������������������������13返回目录目录5.1 启动 �������������������������������135.2 暂停(停止) ���������������������������145.3 调速,运行方式,工作模式切换 �������������������145.4 停止后再启动 ���������������������������155.5 紧急停止 �����������������������������176 其他说明参考 ������������������������18 II Your needs,We have返回目录1Your needs ,We haveCRP-S40、S80简要使用手册1 准备工作1.1 机械正常确保机械装配正常,减速机工作正常,各个关节部件能够合理,顺畅工作。

飞行起弧参数设置说明CRP飞行起弧功能是指在焊接机器人在运动至起弧点的途中,自动提前引弧,以起到加快焊接起弧速度的作用。
CRP焊接逻辑顺序为:提前送气→引弧→起弧确认→引弧成功→起弧→焊接→收弧→回烧→削球→防粘丝→延迟送气→回抽丝。
在实际焊接中,若想加快焊接速度,提高焊接效率,可以在以下几个方面加以调整。
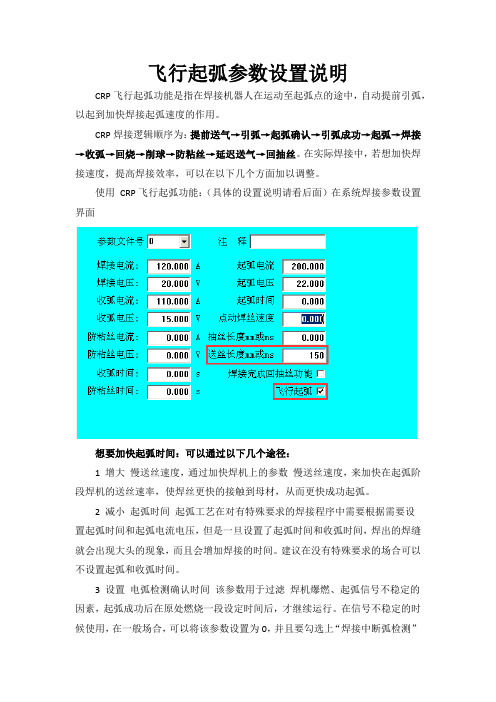
使用CRP飞行起弧功能:(具体的设置说明请看后面)在系统焊接参数设置界面想要加快起弧时间:可以通过以下几个途径:1 增大慢送丝速度,通过加快焊机上的参数慢送丝速度,来加快在起弧阶段焊机的送丝速率,使焊丝更快的接触到母材,从而更快成功起弧。
2 减小起弧时间起弧工艺在对有特殊要求的焊接程序中需要根据需要设置起弧时间和起弧电流电压,但是一旦设置了起弧时间和收弧时间,焊出的焊缝就会出现大头的现象,而且会增加焊接的时间。
建议在没有特殊要求的场合可以不设置起弧和收弧时间。
3 设置电弧检测确认时间该参数用于过滤焊机爆燃、起弧信号不稳定的因素,起弧成功后在原处燃烧一段设定时间后,才继续运行。
在信号不稳定的时候使用,在一般场合,可以将该参数设置为0,并且要勾选上“焊接中断弧检测”功能,并将电弧耗尽检测时间设置为0.5s左右,以便在断弧时及时将机器人停下,以免发生意外。
4 预备送气时间该参数是在起弧信号发出后,延时一段预备送气时间再起弧,如果没有特殊的要求,将该参数设置为0,也可加快起弧速度。
5 尽量缩短在起弧点处,焊丝末端和工件之间的距离。
焊丝末端离母材越近,起弧时间越短,配合合适的慢送丝速度,可以大大地提升成功起弧的速度。
以上的起弧参数设置技巧在配合飞行起弧时会达到最优效果。
在保证送丝顺畅和参数恰当的情况下,加上飞行起弧功能就能明显的提升起弧的速率。
以下介绍飞行起弧的设置和使用方法。
飞行起弧设置步骤:一·焊机侧设置回烧参数:在焊机参数中找到回烧时间(默认值一般为0.06s~0.08s)并设置一个合适的回烧时间(奥太焊机一般为默认值0.06s~0.08s,麦格米特焊机一般设置为0.5s 以内)。
麦格米特焊机和KUKA机器人通讯配置说明2.1麦格米特焊机和KUKA配置操作说明目录一、数字通信电气接口: (2)二、DeviceNet 通讯配置: (2)三、DeviceNet 通讯协议: (3)四、焊机侧操作说明: (4)4.1 焊机内部菜单设置说明: (4)4.2 各操作模式设置说明: (6)五、参数配置曲线: (7)一、数字通信电气接口:机器人数字接口航空插引脚顺序如图3-43 所示,引脚定义见表3-27。
图 1 航空插引脚顺序二、 DeviceNet 通讯配置:其中:1、主站MAC ID 为机器人的MAC ID,在不与焊机MAC ID 重复的情况下可以在0-63范围内任意设置;2、从站MAC ID 为焊机的MAC ID,默认为2,在不与机器人MAC ID 重复的情况下可以通过焊机内部菜单FA3 在1-63 范围内任意设置,当FA9 为KUK、FA3 为OFF 时,使用默认MAC ID 2;三、 DeviceNet 通讯协议:备注:数字信号默认情况下均以1 为有效值。
四、焊机侧操作说明:4、1焊机内部菜单设置说明:内部菜单中F16、F17、FA0-FA9 为机器人配套焊机独有的参数,其余为手工焊机与机器人焊机共有,详见焊机说明书,内部菜单设置步骤如下:开始1、F01 为恢复出厂设置,长按“执行”键3 秒恢复出厂设置,该操作不会恢复FA0-FA9 选项的机器人设置参数。
2、F16 为反抽丝送丝速度,OFF 为默认值1.4 米/分钟;3、F17 为反抽丝时间,OFF 表示反抽丝时间由指令持续时间控制,如果不为OFF 则表示,每一次反抽丝指令都只执行设置的固定时间,用于控制每次回抽焊丝的长度;4、FA0 为机器人功能开关,OFF 为关闭机器人功能,焊机会变为手工焊机;ON为打开机器人功能,焊机为机器人配套焊机;5、FA1 为近控开关,OFF 为关闭近控功能,ON 为打开近控功能;数字口通讯时该功能自动切换,无需调节;模拟口通讯时需要手工打开近控开关才是使能近控模式。
IO 扩展模块用户速查手册V1.0感谢您使用MC5000系列IO扩展模块。
在使用PLC产品前,请您仔细阅读本手册,以便更清楚地掌握产品特性,更安全地应用,充分利用本产品丰富的功能。
本速查手册用于MC5000系列IO扩展模块的设计、安装、连接和维护的快速指引,便于用户现场查阅所需信息,并有相关选配件的简介,常见问题答疑等,便于参考。
本手册适合以下成员:MC5000-0032ETN-P版本号:V1.0日期:2020-06-02若需要更详细的产品资料,可参考我公司发行的《MC5100用户手册》、《MStart 编程软件用户手册》和《MC5000系列可编程控制器编程参考手册》。
如需要,可向供货商咨询,或者去{HYPERLINK ""}下载。
1.外观以及部件名称1.1模块外观及端子介绍{EMBED Visio.Drawing.15}图1-1外观端子示意图2.型号说明2.1型号和主要技术指标表2-1技术指标3.安装说明3.1采用DIN 槽安装固定模块采用35mm宽度的DIN槽进行安装,扩展模块之间通过卡扣连接。
模块相互连接以后向模块前方推动连接卡后锁紧模块。
打开模块底部的DIN 卡扣,将模块底部卡在DIN导轨上。
旋转模块贴近DIN导轨,合上DIN卡扣。
仔细检查模块上DIN卡扣与DIN导轨是否紧密固定好,如下图:图3-1模块连接安装示意图3.3用户端子介绍扩展IO 模块的IO 端子为两只同型号18PIN 座子,用户需要配IO 线和IO 接线端子才可以使用,需要单独选购。
MC5000-0032ETN-P 的IO 端子CN1定义如表3-2{EMBED Visio.Drawing.15}图3-2用户端子定义示意图表3-2CN1及CN2端子定义表●32路输出:Y00~Y07(COM0公共端) Y10~Y17(COM1公共端) Y20~Y27(COM2公共端)Y30~Y37(COM3公共端)注:模块输出回路每8路共用一个公共端,共有4个公共端接线点,且相互隔离,用户需根据实际负载情况合理分组使用公共端接线点,每个公共端接线点能承载2.4A 负载。
麦格米特焊机和KUKA配置操作说明目录一、数字通信电气接口: (2)二、DeviceNet 通讯配置: (2)三、DeviceNet 通讯协议: (3)四、焊机侧操作说明: (4)4.1 焊机内部菜单设置说明: (4)4.2 各操作模式设置说明: (6)五、参数配置曲线: (7)一、数字通信电气接口:机器人数字接口航空插引脚顺序如图 3-43 所示,引脚定义见表 3-27。
图 1 航空插引脚顺序二、 DeviceNet 通讯配置:其中:1、主站MAC ID 为机器人的MAC ID,在不与焊机MAC ID 重复的情况下可以在0-63范围内任意设置;2、从站MAC ID 为焊机的MAC ID,默认为2,在不与机器人MAC ID 重复的情况下可以通过焊机内部菜单FA3 在1-63 范围内任意设置,当FA9 为KUK、FA3 为OFF 时,使用默认MAC ID 2;三、 DeviceNet 通讯协议:备注:数字信号默认情况下均以1 为有效值。
四、焊机侧操作说明:4、1焊机内部菜单设置说明:内部菜单中F16、F17、FA0-FA9 为机器人配套焊机独有的参数,其余为手工焊机与机器人焊机共有,详见焊机说明书,内部菜单设置步骤如下:开始1、F01 为恢复出厂设置,长按“执行”键3 秒恢复出厂设置,该操作不会恢复FA0-FA9 选项的机器人设置参数。
2、F16 为反抽丝送丝速度,OFF 为默认值1.4 米/分钟;3、F17 为反抽丝时间,OFF 表示反抽丝时间由指令持续时间控制,如果不为OFF 则表示,每一次反抽丝指令都只执行设置的固定时间,用于控制每次回抽焊丝的长度;4、FA0 为机器人功能开关,OFF 为关闭机器人功能,焊机会变为手工焊机;ON为打开机器人功能,焊机为机器人配套焊机;5、FA1 为近控开关,OFF 为关闭近控功能,ON 为打开近控功能;数字口通讯时该功能自动切换,无需调节;模拟口通讯时需要手工打开近控开关才是使能近控模式。
MetaTig系列全数字控制直流、交直流TIG焊接电源用户手册版本:V1.0编码:R33010862深圳市麦格米特焊接技术有限公司为客户提供全方位的技术支持,用户可与当地经销商或公司总部联系。
深圳市麦格米特焊接技术有限公司地址:广东省深圳市南山区科技园北区朗山路紫光信息港B座5楼麦格米特电气:麦格米特焊接:客户服务热线:400-666-2163邮箱:******************邮编:518057前言前言感谢您购买本公司全数字控制直流、交直流TIG焊接电源(以下简称焊机)。
本手册提供用户安装配线、参数设定、故障诊断和排除及日常维护相关注意事项。
为确保能正确安装及操作焊机,发挥其优越性能,请在装机之前,详细阅读此用户手册,并请妥善保存及交给该焊机的使用者。
本公司持续对产品进行研发和创新,本用户手册中的内容、参数、图片与实物有差异时,以实际产品为准,如有变更,恕不另行通知,本公司拥有对本用户手册的最终解释权。
安全事项安全注意事项安全定义为了安全、正确的使用水箱,预防对您或他人造成危害以及财产损害,本手册使用各种警告标识进行说明,请务必在充分理解的基础上严格遵守。
下述标识按危险或损害的程度分类,并进行警告。
请按要求操作,否则可能造成死亡或者重伤。
请按要求操作,否则可能造成中等程度伤害或轻伤或造成损坏财物。
安装注意事项·在搬运移动焊机前,须切断配电箱开关的输入电源。
·使用吊车搬运焊机时,须确认机器外壳已安装。
·请安装在不可燃物体上,否则有发生火灾的危险。
·不要把可燃物放在附近,否则有发生火灾的危险。
·不要安装在含有爆炸性气体的环境里,否则有引发爆炸的危险。
·必须由具有专业资格的人进行配线作业,否则有触电的危险。
安全事项·搬运时,不要让操作面板和盖板受力,否则掉落有受伤或损坏财物的危险。
·安装时,应该在能够承受焊机重量的地方进行安装,否则掉落时有受伤或损坏财物的危险。
CRP配麦格米特焊机数字化通讯功能使用说明书一、通讯配置通讯接线如下图所示:1.232串口通信设置232串口波特率可用拨码开关进行选择,可选波特率为19200、57600、115200和230400,共四个档。
使用拨码开关选择其中一个波特率,串口设置为数据位8位,停止位1位,无校验位,无流控制。
详见下表:通过拨码开关设置串口的波特率之后,模块必须重新上电,所设置的波特率才会生效,否则将以原来的串口波特率进行通信。
如果CAN通信数据频繁或CAN2.模块的调试在模块上设计有6个LED灯,用来指示模块的工作状态。
①⑤④②⑥③如上图:①为模块232串口接收指示灯。
②为模块232串口发送指示灯。
③为模块电源指示灯。
④为模块CPU工作指示灯。
⑤为模块CAN发送数据指示灯。
⑥为模块CAN接收数据指示灯。
电源指示灯:表示电源状态,模块电源接通该指示灯长亮。
CPU指示灯:表示CPU工作状态,CPU正常工作该指示灯按一定的频率闪烁。
串口接收指示灯:闪烁时表示模块串口正在接收数据。
串口发送数据指示灯:闪烁时表示模块串口正在发送数据。
CAN接收指示灯:闪烁时表示CAN接口正在接收数据CAN发送指示灯:闪烁时表示CAN接口正在发送数据,数据发送成功该灯才亮。
如果CAN接收指示灯闪烁,USART发送指示灯不闪烁,表示模块接收了CAN 数据但是没有进行转发,可能是设置了软件过滤,不转发接收到的ID信息。
如果USART接收指示灯闪烁,CAN发送指示灯不闪烁,表示模块接收了串口数据但没有进行CAN转发,会有以下几种情况。
1.发送的是指令数据。
2.模块进行CRC校验检验时检出数据错误。
3.CAN波特率不匹配,导致信息无法转发。
4.CAN数据帧没有按照要求填充,模块认为数据有误不进行转发。
5.CAN网络不能进行收发通信,如线路断开,终端电阻不匹配。
3.模块的安装和接线1、CAN端口接线在连接安装过程中CAN通信线,请采用带屏蔽层的双绞线,CANH连接JP2 - 1脚,CANL线连接JP2 – 2脚,屏蔽线可靠连接至接头金属外壳。
由于模块电路板上设计有120欧姆终端电阻,故不需另外连接终端电阻。
2、232和电源端口接线按照上图进行电路连接,232串口通信采用带屏蔽的双绞线,232通信线路尽可能短,屏蔽层必须可靠连接金属接口外壳。
4.CRP-S100(Ecat系统)CAN通讯模块说明S100主机中带有一个CAN-232通信模块,内部使用的是COM3与模块连接,固定串口波特率为115200Bps不能进行更改,CAN波特率支持100K、125K、200K、250K以及500K,可通过指令进行设置,支持软件过滤器组设置。
连线如下图,采用带屏蔽的双绞线进行连接模,块带有模块带有120欧姆终端电阻。
二:焊机参数配置1.从站MAC地址从站MAC ID为焊机的MAC ID,默认为2,在不与机器人MAC ID重复的情况下可以通过焊机内部菜单“FA3”在1-63范围内任意设置,当“FA3”为OFF时,使用默认MAC ID 2;2.焊机参数设置方法举例(焊机的参数设置详细步骤和使用事项可以参照麦格米特焊机用户手册)i.电流送丝速度切换开关长按功能键进入菜单旋转旋钮,进入内部菜单FA3选择焊机 MAC 地址旋转旋钮,进入内部菜单FA7选择焊接给定方式;点击“执行”按钮,更改(此时参数内容为闪烁状态)OFF为选择给定送丝速度;ON为选择给定电流。
参数内容更改后,再次点击“执行”按钮,保存更改。
2、通讯协议选择进入内部菜单 FA9 选择 OFF 为模拟: 0:发那科-麦格米特通讯协议(数码管显示FAN);3、低压寻位如果只有低压寻位,寻位使能“FA8”要设为Lo。
三、使用焊机数字化通讯功能且第一次升级软件时的设置流程一、软件升级将系统软件版本升级至5-7版本或更新的版本。
二、配置焊机参数1、在“用户工艺”菜单下选择“弧焊工艺”选择“焊接装置”选择“焊机配置”,进入焊机配置界面。
如下图:在焊机配置主界面有如下设置内容:控制焊机方式:用于选择控制焊机方式,“模拟控制”或者“数字控制”。
当选择为“模拟控制”时,“焊接电源厂家”和“焊机数字控制设置”下所有设置为灰色,不可设置。
在“数字模式”切换为“模拟控制”时,将自动断开连接。
*○1焊接电源厂家:用于选择焊机厂家,当前版本支持奥泰和麦格米特。
焊机选择:用于设置焊机是否启用。
焊机工作模式:用于选择焊机的工作模式。
包括以下5种模式:*○21)直流一元化模式:该模式下除焊接方法锁定在直流(无法选择脉冲和双脉冲选项)以外,其他参数和选项均可以自由设置;机器人下发的给定参数为送丝速度/电流和一元化电压修正值,默认接收的为送丝速度,可以通过调节焊机内部菜单 FA7 选项来设定接收的为电路;该模式下无法进行存储、调用操作,也无法通过显示面板去调节给定电流电压;2)脉冲一元化模式:该模式下除焊接方法锁定在脉冲和双脉冲(无法选择直流选项)以外,其他参数和选项均可以自由设置;机器人下发的给定参数为送丝速度/电流和一元化电压修正值,默认接收的为送丝速度,可以通过调节焊机内部菜单 FA7 选项来设定接收的为电路;该模式下无法进行存储、调用操作,也无法通过显示面板去调节给定电流电压;3) JOB 模式:该模式下仅能通过机器人下发 JOB 号后去调用已经存储好的参数,可以通过 JOB 电流/电压修正值去调整给定电流/电压,无法进行存储、调用操作,也无法通过显示面板去调节任何参数;4)近控(自由)模式:该模式下只能通过显示面板去调节给定电流/送丝速度、电压/一元化修正值,可以设置所有参数和选项,同时可以进行存储、调用操作;机器人与焊机在建立通讯后,只有该模式下才能进行存储和调用操作来保存及浏览 JOB参数;建立通讯之前焊机默认为模拟接口控制,也可以通过打开近控开关 FA1( ON)来进行存储和调用操作,用以保存及浏览 JOB 参数;5、)分别模式:该模式下除了无法手动选择一元化和手动选择双脉冲工艺(双脉冲只有一元化模式)以外,所有参数和选项均可以自由设置;机器人下发的给定参数为送丝速度/电流和电压,默认接收的为送丝速度,可以通过调节焊机内部菜单 FA7 选项来设定接收的为电流;该模式下无法进行存储、调用操作,也无法通过显示面板去调节给定电流电压;通讯方式:用于选择系统与焊机之间的通讯方式。
选择“焊机电源厂家”时,“通讯方式”会自动选择,无需手动选择。
通讯接口:用于选择系统与焊机之间的通讯接口。
控制器MAC地址:用于设置主站MAC地址,若没有输入,则默认为0;主站MAC地址可随意设置,但不能大于63。
*○3焊机MAC地址:用于设置从站MAC地址,若没有输入,则默认为0;从站MAC 地址要与焊机对应,且不能大于63。
*○3注:*○1:在用户未设置参数文件时,系统默认为模拟控制方式!*○2:不同的焊机厂家,工作模式选项不同!切换工作模式时,需重新连接才能生效!*○3:主站和从站MAC地址不能相同!2、设置关于数字通讯的相关参数在上图界面设置完成相关参数后,点击“连接”键,系统自动与焊机进行通讯连接:连接成功—焊机通讯状态指示灯为绿色;连接失败—焊机通讯状态指示灯为红色。
连不上如何处理?在连接成功后,焊机通讯指示灯为绿色状态下,点击“断开”键,系统与焊机通迅断开,焊机通讯指示灯为红色,此时需手动点击“连接“才能恢复通讯。
点击“退出”键:1、当控制焊机方式为“数字控制”焊机选择“启用”时,当前连接状态为未连接,系统将自动建立连接。
2、当控制焊机方式为“模拟控制”焊机选择“禁用”时,当前连接状态为已连接,系统将自动断开连接。
四、故障说明系统具有故障检测和种保护功能,保护功能动作时,在配置焊机参数过程、建立连接、正常运行时,会显示报警状态。
可根据报警状态对应下列解决方法解除报警。
以下是焊机报警代码和报警内容一览表:五、数字焊机在使用时的一些技巧和注意事项:1.麦格米特焊机的一元化设置所谓焊接的一元化,是指焊机会根据当前设置的焊接给定电流及一元化电压修正值自动匹配出焊接电压。
麦格米特焊机的一元化设置要先在焊机侧开启该功能,短按一元/分别键,进入一元化模式通过右循环切换键可查看匹配电压值和弧长修正值。
将右循环切换键切换至一元化电压修正值“±”,指示灯亮或闪烁时,通过调节送丝机上的电压旋钮或焊机电源上的面板旋钮,可对一元化模式下自动匹配的电压进行微调,如图所示。
一元化中的电压修正值默认值为 0,范围-30%~+30%。
当前焊接给定电压关系式如下:当前焊接给定电压=一元化电压值+(电压修正值%)×(一元化电压值)2.麦格米特焊机和系统的一些参数设置①起弧时间焊机和系统都可以设置起弧时间,这时需将焊机和系统的起弧时间设置为同样的值,才能正确执行起弧动作。
②预备/滞后送气时间滞后送气时间同预备送气时间一样,系统上设置了也是按照焊机侧设置的时间进行滞后送气。
③起弧时间(焊机上的P17)该参数要系统和焊机设置的一致时才能正常生效④收弧时间(焊机上的P18)该参数要系统和焊机设置的一致时才能正常生效⑤P02慢送丝速度慢送丝速度指的是起弧前的送丝速度,慢送丝速度的快慢会影响起弧的快门,慢送丝速度越大,起弧越快,反之越慢,但是设置的过大可能会引起爆燃堵导电嘴的情况,要根据实际来设置最佳值。
⑥P01回烧时间回烧时间是指在焊接结束后焊丝会在焊接的结束点继续燃烧一段时间,以此来控制干伸长度,但由于我们系统的动作没和焊机匹配,该参数开启后会导致程序完成后干伸过长,建议不开启3.会影响起弧时间快慢的一些条件:①电弧检测确认时间该参数会在成功起弧后在原地保持一定的时间,确认起弧成功后才继续运动,会直接影响起弧时间的快慢。
由于我们有断弧的检测,建议用户此参数设置为0。
②慢送丝速度该参数的描述可见上一页③预备送气时间该参数设置后,起弧前会送气一段时间后采起弧,这段时间也会影响焊接起弧的节拍。
④焊接前的干伸长度焊接时起弧的快慢很大程度上受当时的干伸长度影响,焊接前干伸长度越靠近工件,起弧越快,这和加快慢送丝速度的思路是一致的,干伸长度的长和短会让起弧的时间有很大的差异。
4.注意事项在平常焊接中,请勾选断弧检测功能。
在焊接中如出现:送丝机故障、地线松动、电源断电、伺服断线等情况机器人都能作出正确的报警和断弧动作。
以下是危险动作,可能会造成安全事故和损失,请注意:危险动作:①如果不勾选断弧检测功能,在遇到如地线松动等情况下,送丝机会出现一直出丝的情况而没有任何报警的情况。
②如不勾选断弧检测功能,在正常焊接下,如出现焊机断电,电弧熄灭,焊丝粘住母材,而此时机器人仍然在运动,有可能会将母材拖离原位或者造成送丝机的损伤。
③在示教程序时请尽量调低试运行的速度,以免速度过大撞歪焊丝或碰坏工件。