CATIA常见运动仿真机构命令详解分析
- 格式:ppt
- 大小:4.82 MB
- 文档页数:13

DMU 机构运动分析目录1产品介绍32图标功能介绍(基本概念、基本界面介绍)32.1DMU运动仿真(DMU Simulation)工具条32.2DMU运动副创建工具条(Kinematics Joints)32.3DMU Generic Animation42.4机构刷新(DMU Kinematics Update)42.5干涉检查模式工具条(Clash Mode)52.6DMU 空间分析(DMU Space Analysis)53功能详细介绍53.1DMU运动仿真(DMU Simulation)工具条53.1.1用命令驱动仿真(Simulating with Commands)53.1.2用规则驱动仿真(Simulating With Laws)73.1.3仿真感应器(Sensors)83.1.4机构修饰(Mechanism Dressup)93.1.5创建固定副(Fixed Part)103.1.6装配约束转换(Assembly Constraints Conver)113.1.7测量速度和加速度(Speeds and Accelerations)123.1.8机构分析(Mechanism Analysis)143.2DMU运动副创建工具条(Kinematics Joints)163.2.1创建转动副(Creating Revolute Joints)点击163.2.2创建滑动副(Creating Prismatic Joints)173.2.3同轴副(Creating Cylindrical Joints)183.2.4创建球铰连接(Creating Spherical Joints)183.2.5创建平动副(Creating Planar Joints)193.2.6创建刚性副(Rigid Joints)203.2.7点-线副(Point Curve Joints)203.2.8曲线滑动副(Slide Curve Joints)213.2.9点-面副(Point Surface Joints)223.2.10万向节(Universal Joints)223.2.11CV连接(CV Joints)233.2.12创建齿轮副(Gear Joints)243.2.13滑动-转动复合运动副(Rack Joints)263.2.14滑动-滑动复合运动副(Cable Joints)273.2.15用坐标系法建立运动副(Creating Joints Using Axis Systems)27 3.3DMU Generic Animation工具条293.3.1创建运动仿真记录(Simulation)293.3.2生成重放文件(Generate Replay)303.3.3重放(Replay)313.3.4仿真播放器(Simulation Player)313.3.5编辑序列(Edit Sequence)313.3.6包络体(Swept Volume)313.3.7生成轨迹线(Trace)313.4机构刷新(DMU Kinematics Update)323.4.1机构位置刷新(Update)323.4.2输入子机构(Import Sub-Mechanisms)323.4.3重设位置(Reset Positions)333.5干涉检查模式工具条(Clash Mode)343.5.1关闭干涉检查(Clash Detection(Off)343.5.2打开干涉检查(Clash Detection(On)343.5.3遇到干涉停止(Clash Detection(Stop)343.6DMU 空间分析(DMU Space Analysis)343.6.1干涉检查(Clash)343.6.2距离和距离带分析(Distance and band analysis)341产品介绍DMU机构运动分析(Kin)是专门做DMU装配运动仿真的模块。

运动仿真学习情况1——旋转副;可以单独驱动,驱动的是旋转角度;只能实现绕自身的轴旋转;√2——棱形副;可以单独驱动,驱动是滑动长度;只能实现沿着公共线滑动;√3——圆柱副;可以单独驱动,可以同时驱动是滑动长度和旋转角度,这两个驱动添加后就可以运动了;只能实现绕轴旋转并沿轴线滑动;√4——螺钉副;可以单独驱动,实现实体每转动1圈,就前进多少mm。
不一定非要是螺杆和螺母,其他的旋转前进仿真也可以使用该命令。
6——平面副;不可以单独驱动,约束一公共平面,具有除沿平面法向移动及绕平面坐标轴转动外的3个运动自由度√7——点曲线副;不可以单独驱动,只能由其他运动副带动起来;点必须在曲线的上面,不在就是不行,实现点在曲线,也就是点在轨迹线上走动。
√8——滑动曲线;不可以单独驱动,只能由其他运动副带动起来;约束两轨迹线相切,实现线在线上滑动;√9——滚动曲线;不可以单独驱动,只能由其他运动副带动起来;约束两轨迹线相切,实现线在线上滑动;√10——点曲面;√不知道他与点曲线有何区别?11——U形结合;√3条轴线相交且位于同一平面内,且输入、输出端轴线与中间轴轴线夹角相同时,可以使用该命令13——齿轮接合;注意齿轮接合的对象不一定是齿轮,只要是一个旋转体带动另一个旋转体的话,就可以使用齿轮接合。
14——齿轮齿条:对旋转副和棱形副进行约束,有个比率15——电缆;√16——刚性结合;√17——使用命令进行模拟√18——使用法则曲线进行模拟√19——机械装置修饰20——装配约束转换√22——分析机械装置23——模拟24——编辑模拟25——重放26——模拟播放器27——编辑序列28——扫略包络体29——轨迹30——重置位置:√仿真的注意点如下:1——驱动对象的选择是有原则的;不可以随便选择,必须符合实际的运动情况;当定义驱动对象时,驱动对象也是有原则的,比如我们在定义旋转副的驱动对象时,如果要求我们的驱动对象进行360度全周旋转的话,那么的我们的对象在实际情况中必须能够或者说可以旋转360度,在整个运动机构当中并不是所有的旋转副都可以旋转360度,有的只能旋转几度,,因此一定要搞清楚哪个对象可以旋转360度,搞清楚这个事情后在去将他定义为驱动对象,如果对象本身不可能旋转360度,而你要把他定义为驱动,还要他旋转360度的话,这样的运动仿真是不成功的。

产品研发一部底盘室:马学超题目:基于CATIA运动仿真案列解析DMUDMU—案例讲析•1、运动分析证明带夹角十字轴不等速性运动分析证明带夹角十字轴不等速性及、三轴平行的等速性;及一、三轴平行的等速性;2、绘制单前桥转向的实际转向特性曲线;单桥转向实转向特性曲线3、扫掠包络体和运动间隙、干涉校核;DMU—案例讲析DMU•案例一:运动分析证明带夹角十字轴不等速性及一、三轴平行的等速性DMU—案例讲析DMU本案例以通用结合为基础,先做运动仿真,模型如下;仿真步骤就不再赘述在蓝色零件和灰色零件之间的旋转结合设置驱动角度,其余两个设为从动件;由右下图的十字销轴线方向可以的“十字销轴线方向”可以看出通用结合是在两个旋转结合之间用默认的十字轴或是万向节接所以可以看成是传动轴间的动;连接,所以可以看成是传动轴之间的运动;DMUDMU—案例讲析设置完成之后,点击(使用命令进行模拟)按钮,弹出如下图1所示窗口,并点击“激活传感器”,弹出如下图2所示窗口,依次将窗口中的三个旋转结合的传感器打开,“观察到”下方的“否”图1全部变为了“是”;此时用鼠标在图1中拖动滚动条到个极限位置然后选中拖动滚动条到一个极限位置,然后选择“按需要”,并点击让其旋转两周;图2DMU—案例讲析DMU旋转过两周之后,点击“传感器”窗口中的“图形”按钮,系统便会自动弹出如下图1所示窗口,图中左边窗口表示三个旋转结合的运动曲线图,横坐标表示步骤数,纵坐标表示瞬时角度值;图1DMU—案例讲析DMU由右两图可以分析出,红色线和黄色线完全重合,色线和黄色线完全重合表示旋转结合1和旋转结合3的瞬时角度值始终是相等的;黄色线和绿色线并未重合,而是随着的步骤数或是时间的变化,存在着大、小、相等关系的波动;由上可得结论:夹角相等的传动轴的角速度是时刻相等的,夹角不同的传动轴的角速度是不相等的;DMU—案例讲析DMU•案例二:绘制单前桥转向的实际转向特性曲线首先对前桥产品中各个部件之间的结合关系进行分析(此处已将左轮毂与做轮胎合并为一个part,右轮毂与轮胎合并为一个part):左轮与工字梁之间是旋转结合,左轮与横拉杆之毂与轮胎合并为个t)左轮与工字梁之间是旋转结合左轮与横拉杆之间是球头结合,右轮与横拉杆之间是球头结合,右轮与工字梁之间是旋转结合;按照分析,依次将各结合实施好;DMUDMU—案例讲析按照分析将各个部位结类束好按照分析将各个部位的结合类型约束好,发现系统的自由度并不为0,不会提示“可以模拟机械装置”,那是因为横拉杆和左右车轮之间的两个球头结合并不能将横拉杆绕本身轴线转动的自由度约束住,所以不能模拟,此时我们可以将左端的球头约束处添加一个万向节,由球头约束转化成十字轴与万向节前后节叉之间的两个旋转结合,再将前节叉与左轮之间的两个旋转结合再将前节叉与左轮固连在一起,后节叉与横拉杆固连在一起,这样便能够约束住横拉杆的转动;十字轴的中点就是球头的中点;DMUDMU—案例讲析yzxo一根杆本身具有6个自由度,分别为沿x、y、z三个轴的轴向移动,和绕三个轴的转动,轴头处的两个球面结合能够将杆本身的沿三个轴的轴向移动约束住,的转动轴头处的两个球面结合能够将杆本身的沿三个轴的轴向移动约束住绕y轴和z轴的转动自由度能够约束住,但是绕x轴,也就是本身球头中心点连线的转动自由度没有约束住,所以自由度是没有约束完全的,所以要将其中的一处球面结合转化为其他形式的结合类型;DMU—案例讲析DMUyzxo对于具有折弯的杆系,对其一端处球面结合类型的转化或添加其他形式的结合类型非常关键,杆系绕球头中心点连线的轴线的转动角度如果失真的话,会导致杆型非常关键杆系绕球头中心点连线的轴线的转动角度如果失真的话会导致杆系折弯处与周边零部件之间的干涉、间隙校核出现严重错误,经过一定量的实验经验验证,将一端处的球面结合转化为一个万向节的方式较为合理,没有太大出入,并且理解、操作较为简单;入并且理解操作较为简单DMUDMU—案例讲析※将两个球头中一个球头结合转化成万向节连接是一个重点,也是难点,将两个球头中个球头结合转化成万向节连接是个重点也是难点万向节的初始位置对仿真模拟的运动真实性有很大影响,尤其是在有多个万向节并用的时候,这个要在反复的尝试和经验的指导中寻找到比较合适的位置与状态;DMU—案例讲析DMU将万向节的结合设置好之后,系统便会提示将万向节结设好后统便会提示“可以模拟机械装置”,此时产品中的树的状态如右图所示,双击“旋转1”,弹出右下图所示窗口,对其中的角度进行设置,左转为‐45deg,右转为36deg,设置完成点击确定;DMU—案例讲析DMU单击(使用命令进行模拟)按钮,弹出右上图所示窗口,点击“激活传感器”,弹出如右下图所示窗口,将其中“旋转1”、“旋转2”的传感器打开,其状态由“否”变为“是”;此时,点击上图窗口中的按钮,让滚动条此时点击上图窗中的按钮让滚动条滚动一圈,此时,点击下图窗口中的“图形”按钮,便会弹出下页中的曲线图;DMUDMU—案例讲析系统自动生成右图曲线图为旋转1和旋转5即左轮和右轮的不同步骤时或是不同时刻时的角度值同时刻时的角度值;DMU—案例讲析DMU点击右图中“文件”按钮,会弹出右下图所示窗口,此窗口为上页所示曲线图的各个步骤时的对应的角度值的excel表格导出命令,将此表格文档命名为“texingquxian”,并保存;DMU—案例讲析DMU双击,打开文档,文档中C列为左轮的瞬时文档中“”列为左轮的瞬时转角值,“D”列为右轮的瞬时转角值,其所处表格格式为文本格式,先将其转化为“文本”格式,先将其转化为“数字”格式;DMU—案例讲析DMU在excel中插入X Y(散点图),然后点击,弹出右下图,点击窗口中的“添加”按钮,弹出下页窗口DMU—案例讲析DMU右图中系列名称填写转向特性右图中“系列名称”填写“转向特性曲线”,“X轴系列值”选择“C”列数据,“Y轴系列值”选择“D”列数据点击确定时文档中图表据,点击确定,这时文档中图表变为下图所示曲线,此便为以数模为基础的“实际转向特性曲线”通过“实际转向特性曲线”与“理论转向特性曲线”的比较,可分析“吃胎”问题;“吃胎”问题DMUDMU—案例讲析案例中要点此案例中的要点:1、数模的准确性:数模中的主销倾角,横拉杆长度,梯形节臂,球头中心点位置的准确等;2、等效转换球头结合的万向节的节叉的初始位置的合适性;DMUDMU—案例讲析•案例三:扫掠包络体和运动间隙、干涉校核将4181车型数模按照如图所示进行装配,零件有:车架(包含固定在车架上的方向机及转向操作机构,前悬架总成,前轴挡泥板)转向垂臂,直拉杆,左转向轮,工字梁,横拉杆,右转向轮;DMU—案例讲析DMU具体结合类型:转向垂臂和方向机之间为旋转结合,垂臂和直拉杆之间为球头结合,直拉杆和左转向轮的转向节臂之间为球头结合,左转向轮为球头结合直拉杆和左转向轮的转向节臂之间为球头结合左转向轮和工字梁之间为旋转结合,左转向轮梯形臂和横拉杆之间为球头结合,横拉杆和右转向轮梯形臂之间为球头结合,右转向轮和工字梁之间为旋转结合,设置车架为固定件,工字梁和车架固连在一起,左转向轮和工转结合设置车架为固定件工字梁和车架固连在一起左转向轮和工字梁之间的旋转结合设置驱动角度;DMU—案例讲析DMU由案例2知:连续的两个球头结合中,要将其中的一个球头结合转化为一个万向节的连接,现在产品中导入万向节叉和十字轴,将转向垂臂和直拉杆之万向节的连接现在产品中导入万向节叉和十字轴将转向垂臂和直拉杆之间的球头结合用一组万向节代替,前后节叉分别与十字轴之间设置旋转结合,前节叉与转向垂固连在一起,后节叉与直拉杆固连在一起,将左转向轮梯形臂和横拉杆之间的球头结合用组万向节代替,前后节叉分别与十字轴之间臂和横拉杆之间的球头结合用一组万向节代替,前后节叉分别与十字轴之间设置旋转结合,前节叉与左转向轮梯形臂固连在一起,后节叉与横拉杆固连在一起,此时系统会提示“可以模拟机械装置”;DMU—案例讲析DMU各个部位的结合命令和刚性连接以及固定件都设置好之后,模型树如右图所示;将左轮和工字梁之间的旋转结合设置驱动角度,范围‐45deg到36deg;DMU DMU—案例讲析单击中的(模拟)按钮,弹出右边图1、图2两个窗口,将图1中滚动条拖动到一边极限位置,此时将图图1滚动条拖动到边极限位置,此时将图2窗口中“动画视点”和“自动插入”按钮激活,此时再用鼠标拖动图1中的滚动条来回滚动一遍,然后点击确定;图2DMUDMU—案例讲析此时在左边的树中会显示如右图所示,会生成一栏“模拟”DMU—案例讲析DMU接着点击中第二个(编译模拟)按钮,弹出下图所示窗口,直接点击确定系统会自动成放点击“确定”,系统会自动生成“重放”文件,在左边树中会增加如下图显示;DMU—案例讲析DMU点击中的(模拟播放器)按钮,弹出下图所示窗口,此时在左边树中点击,播放器被激活,此时单击播放器窗口中的各个按钮,仿真运动会自动播放;DMUDMU—案例讲析点击中的(扫掠包络体)按钮,弹出右图1所示窗口,点击“要扫掠的产品”后面的按钮,弹出如下图2窗口,会显产品”后面的按钮弹出如下图窗口会显示出所有要扫掠包络体的产品,这里只做左轮的包络体,单击确定;将图1中的“轮廓”项激活,过滤精度改为1mm;单击预览;激活“过滤精度”改为图1图2DMUDMU—案例讲析单击预览之后,系统会自动计算生成包络体,生成包络体过程比较慢;右下图所示便是左轮的扫掠包络体;DMU—案例讲析DMU此时点击“扫掠包络体”窗口中的“保存”按钮,系统自动弹出生成包络体的保存窗口,其命名可根据需要进行更改,其格式只有四种供选择;这里选择cgr格式进行保存;DMU—案例讲析DMU保存完之后,在“插入”中点击“现有部件”,找到刚才保存的左轮的包络体,插入到装配文件中,此时包络体被导入到装配文件中,如右图显示;件中如右图显示(保存的包络体文件)DMU—案例讲析DMU本案例要点:1、关于万向节的引用,各个位置点必须做到与实际一致,并且在进行结合设置之前,必须保证同轴和平面平行;在进行结合设置之前必须保证同轴和平面平行2、扫掠包络体必须先进行“模拟”‐‐“重放”;(这里只介绍这一种,扫掠包络体还可以识别“追踪”)。

运动分析的一般步骤运动分析在Catia V5 R12中的DMU Kinematics模块下的一般步骤1.创建机构运动分析不是针对单个实体的分析,而是针对一个或多个机构的分析,所以应该先确定一个机构。
通常先确定一个固定件,否则机构是不能运动的。
点击Fixed Part命令,出现如下对话框:在几何模型区,或者树形图上选择想要固定的部件,这时定义好的机构自动出现在树形图上。
2.定义约束依据下表选择合适正确的运动副。
RollSlidePointPointJointJoint一个机构要想运动,通常会有一个或多个驱动,具体要根据机构形式而定。
可以在第二步定义约束的同时进行驱动命令的定义。
例如对于圆柱副,既可以定义角度驱动,又可以定义长度驱动,或者同时定义角度驱动和长度驱动。
完全约束的条件:每个运动副约束的自由度不同,而每个驱动命令只能约束一个自由度,当机构的自由度为零时,为完全约束(小于零为过约束,大于零为欠约束);这时系统会提示你,机构已经可以模拟了:4.设置传感器设置传感器来监测动态仿真过程,比如间隙值、碰撞、速度和加速度等。
在动态仿真过程中,可以根据传感器测量的数据来分析检查样机的设计情况。
常用以下几个命令Clash (碰撞分析);Distance & Band Analysis (距离和区域分析);Speed and Acceleration (速度和加速度测量)等。
(1)距离和区域分析:用于测量一个组内或者两个组内物体之间的最小距离。
在装配或运动分析中还可以进行动态测量。
点击命令: Name :自定义名称或者选择默认名称;Type :测量类型,一共有5种;Mimimum ,Along X ,Along Y ,Along Z ,Band Analysis定义驱动命令计算类型,有三种;Between two selection 在两个选择物体之间;Inside one selection 在一个选择物体之内;Selection Against All 选择物体与所有未选择的物体之间。
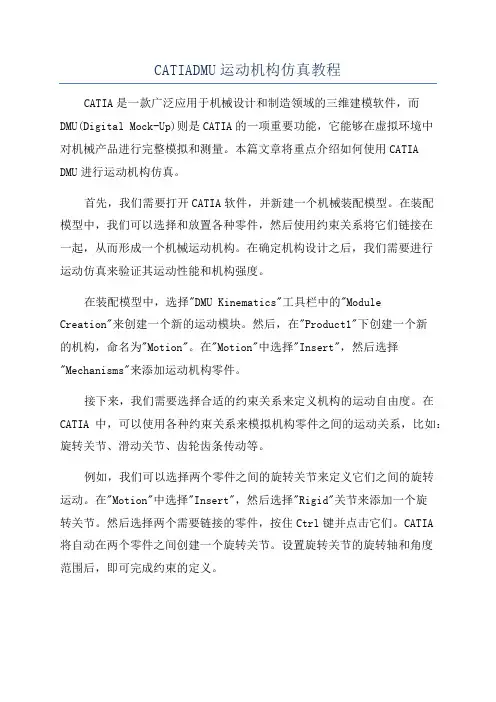
CATIADMU运动机构仿真教程CATIA是一款广泛应用于机械设计和制造领域的三维建模软件,而DMU(Digital Mock-Up)则是CATIA的一项重要功能,它能够在虚拟环境中对机械产品进行完整模拟和测量。
本篇文章将重点介绍如何使用CATIA DMU进行运动机构仿真。
首先,我们需要打开CATIA软件,并新建一个机械装配模型。
在装配模型中,我们可以选择和放置各种零件,然后使用约束关系将它们链接在一起,从而形成一个机械运动机构。
在确定机构设计之后,我们需要进行运动仿真来验证其运动性能和机构强度。
在装配模型中,选择"DMU Kinematics"工具栏中的"Module Creation"来创建一个新的运动模块。
然后,在"Product1"下创建一个新的机构,命名为"Motion"。
在"Motion"中选择"Insert",然后选择"Mechanisms"来添加运动机构零件。
接下来,我们需要选择合适的约束关系来定义机构的运动自由度。
在CATIA中,可以使用各种约束关系来模拟机构零件之间的运动关系,比如:旋转关节、滑动关节、齿轮齿条传动等。
例如,我们可以选择两个零件之间的旋转关节来定义它们之间的旋转运动。
在"Motion"中选择"Insert",然后选择"Rigid"关节来添加一个旋转关节。
然后选择两个需要链接的零件,按住Ctrl键并点击它们。
CATIA将自动在两个零件之间创建一个旋转关节。
设置旋转关节的旋转轴和角度范围后,即可完成约束的定义。
定义完所有的约束关系后,我们可以通过点击"Close"来关闭约束定义窗口。
然后选择"Motion Analysis"工具栏中的"Define Simulation"来定义仿真参数。

CATIA数字样机仿真机构分析CATIA数字样机仿真机构分析 (1)绪论 (2)细节分析 (3)运动仿真的流程 (4)相关概念 (5)重点一一理解各运动副的概念和创建要素 (7)基本运行与位置调整 (10)基于运动函数的模拟 (10)综合模拟 (11)序列编辑与重放 (13)基于运动仿真的数字样机分析 (14)运动副运动规律的查看与保存 (15)运动参数测量 (15)机构运动轨迹分析 (16)扫掠包络体 (17)空间分析 (18)绪论相对于物理样机,数字样机的优点不言而喻,在很大程度上可以代替物理样机的作用,随着数字样机技术的发展和日益成熟,今后会在更大的程度和更多的方面取代物理样机,提高产品的研发效率和技术水平。
学习Catia数字样机需要掌握主要几大块内容:1、工作窗口的构成和功能2、运动仿真流程的掌握3、各种运动副的运用4、基本运动学原理的掌握5、仿真机构的运行与重放6、基于运动仿真的数字样机分析技术细节分析该模块位置:CATIL Digital Mock Up — DMU kin ematicsDMU Generk Animation DMU-般动画各工具按钮的作用需要在实践操作中一步步掌握和数字, 非一朝一夕 的功夫可以消化,其基本功能都是相对简单的,但是要综合运用,必 须勤加练习细细领悟。
运动仿真的流程工具栏主要:有DMU 运动机构Kinematics运动机构更新 四大块。
以及DMI 空间分析3D数字模型—数字样机准备—静态装配(包括全面静态装配后删除限制运动的约束后自动创建运动副、全面静态装配后通过对话框利用相关约束手动创建运动副)或者直接手动创建运动副—所有必要基础运动副创建完成—分析是否需要建立关联运动副并创建—定于仿真过程中的固定件(机械装置自由度DOF变为1)—施加驱动&制定运动法则(直到机械装置自由度DOF为0)—运动模拟与分析。
相关概念1、完整的静态约束:具有装配关系的两个零部件间有3个能够限制或者规定其3D空间全部自由度的约束,保证数字样机上每一个零部件均具有空间中的唯一位置。
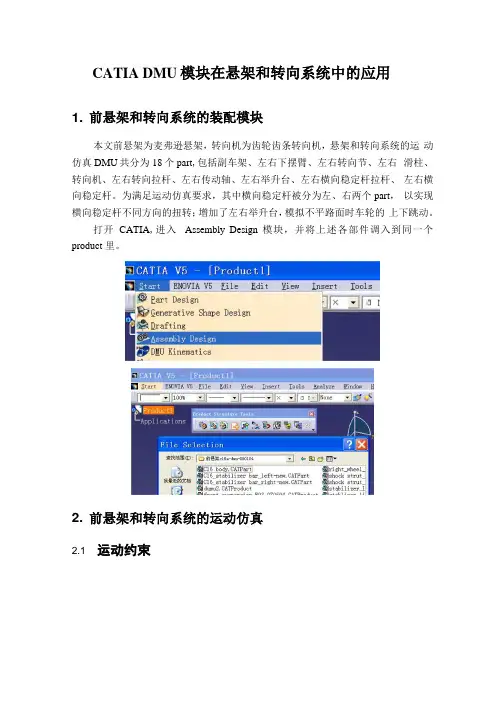
CATIA DMU模块在悬架和转向系统中的应用1. 前悬架和转向系统的装配模块本文前悬架为麦弗逊悬架,转向机为齿轮齿条转向机,悬架和转向系统的运动仿真DMU共分为18个part,包括副车架、左右下摆臂、左右转向节、左右滑柱、转向机、左右转向拉杆、左右传动轴、左右举升台、左右横向稳定杆拉杆、左右横向稳定杆。
为满足运动仿真要求,其中横向稳定杆被分为左、右两个part,以实现横向稳定杆不同方向的扭转;增加了左右举升台,模拟不平路面时车轮的上下跳动。
打开CATIA,进入Assembly Design模块,并将上述各部件调入到同一个product 里。
2. 前悬架和转向系统的运动仿真2.1 运动约束revolute prismatic spherical u joint进入CATIA 的DUM Kinematics 模块,添加运动约束,具体步骤如下: >首先将固定副车架固定Fixed ,并在副车架上做出滑柱上点,下摆臂转动轴 线,转向机中心线。
>左下摆臂与副车架连接为revolute ,限制5个自由度,系统还有1个独立自由度运动约束工具条(点击revolute 下拉菜单弹出)物体1上的 参考平面>左下摆臂与左转向节连接为spherical ,限制3个自由度,系统还有4个独立自由度Spherical joint>左转向节与左转向拉杆连接为spherical ,限制3个自由度,系统还有7个独物体1 (副车架) 上的旋转轴物体2 (下摆臂) 上的旋转轴两参考平面 间距离关系Revolute joint物体1上的 参考平面物体2上 的球心物体1上 的球心立自由度>左转向拉杆与转向机连接为u joint,限制4个自由度,系统还有9个独立自由度Spin 1: | 'Cross-pin axis directionO Normal to spin 1 Normal to spin 2Universal joint》转向机与副车架连接为prismatic ,限制5个自由度,系统还有4个独立自 由度>左滑柱与左转向节连接为Cylindrical ,限制4个自由度,系统还有6个独立 自由度Joint 0at ion: U JointMechanism echanism. 1 'lew Mechani smJoint nameJoint. 30Current selection : Spin 2: O物体2上的滑行方向(直 线,与1的直线重物体1上的滑行方向(直Prismatic joint物体1上的平面物体2上的平面(与1的平面贴Cylindrical joint>左滑柱与副车架连接为u joint,限制4个自由度,系统还有2个独立自由度>左举升台与左转向节连接为point surface,限制1个自由度,系统还有7个独立自由度Point surface>左举升台与副车架连接为Prismatic,限制5个自由度,系统还有2个独立自由度>横向稳定杆(左)与副车架连接为revolute,限制5个自由度,系统还有3 个独立自由度>左横向稳定杆拉杆与横向稳定杆(左)连接为u joint,限制4个自由度,系统还有5个独立自由度>左转向节与左横向稳定杆拉杆连接为Spherical,限制3个自由度,系统还有2个独立自由度>右下摆臂与副车架连接为revolute,限制5个自由度,系统还有3个独立自由度>右转向节与右转向拉杆连接为spherical,限制3个自由度,系统还有9个独立自由度>右转向拉杆与转向机连接为u joint,限制4个自由度,系统还有5个独立自由度>右滑柱与右转向节连接为Cylindrical,限制4个自由度,系统还有7个独立自由度>右滑柱与副车架连接为u joint,限制4个自由度,系统还有3个独立自由度>右举升台与右转向节连接为point surface,限制1个自由度,系统还有8个独立自由度>右举升台与副车架连接为Prismatic,限制5个自由度,系统还有3个独立自由度>横向稳定杆(右)与副车架连接为revolute,限制5个自由度,系统还有4 个独立自由度>右横向稳定杆拉杆与横向稳定杆(右)连接为u joint,限制4个自由度,系统还有6个独立自由度>右转向节与右横向稳定杆拉杆连接为Spherical,限制3个自由度,系统还有3个独立自由度>左传动轴与左转向节连接为u joint,限制4个自由度,系统还有5个独立自由度>左传动轴与副车架连接为point curve,限制2个自由度,系统还有3个独立自由度Point curve>右传动轴与右转向节连接为u joint,限制4个自由度,系统还有5个独立自由度运动约束如下表所示:注:系统此时的自由度数=各个约束限制的自由度数的和+当时系统的独立自由度数。
产品研发一部底盘室:马学超题目:CATIA的DMU运动机构模块功能介绍CATIA—DMU运动机构CATIA DMU 运动机构•对于产品的数字模型而言,进行准确的机构运动及状态分析,是十分基本并且重要的功能。
在DMU运动机构系统中,我们可以依照运十分基本并且重要的功能在运动机构系统中我们可以依照运动学的原理,通过约束自由度的方式建立机构,并且分析机构的运动状态与移动轨迹;态与轨•本文主要提供几种基本的结合,使我们建立机构运动,并且可以本文主要提供几种基本的结合使我们建立机构运动并且可以进行动态仿真,记录运动情形,制作成影片播放;CATIA DMU运动机构CATIA—DMU 运动机构•模块简介:CATIA—DMU运动机构CATIA DMU 运动机构•功能键一览:功能键览CATIA DMU 运动机构CATIA—DMU运动机构•过程:—————将装配件导入DMU模块建立机械装置分析运动结合类型—建立运动结合——约束固定件——设置驱动形式——(两种做法运动仿真):运动仿真)1、使用命令进行模拟(可编辑传感器,导出数据,并绘制图形);2、模拟(可生成自动播放动画,也可编辑传感器)——可通过编译模拟,生成重放,——生成包络体;CATIA DMU 运动机构CATIA—DMU运动机构•运动结合点:运动结合点从左至右结合类型依次为::旋转结合;:棱形结合;:圆柱结合;:螺钉结合;:球面结合:平面结合;:刚性结合;:点线结合;:滑动曲线结合;:滚动曲线结合;:点面结合;:通用结合;:CV结合;:齿轮结合;:架子结合;:电缆结合;:基于轴的结合;CATIA—DMU 运动机构CATIA DMU 运动机构•:旋转结合1、点击按钮,弹出右图1窗口;图12、点击右上角“新机械装置”,弹出图2窗口;图23、单击“确定”按钮,弹出图1窗口图3CATIA DMU 运动机构CATIA—DMU运动机构4、图中“直线1”、“直线2”、“平面1”、“平面2”依次选取螺栓轴线、螺母轴线、螺栓垂直轴线平面、螺母垂直轴线平面,螺栓一垂直轴线平面、螺母一垂直轴线平面,并点击“偏移”与“驱动角度”按钮,如右图4显示,并单击“确定”图4CATIA DMU 运动机构CATIA—DMU运动机构5、单击中的按钮,弹出右图所示窗口,然后直接左键单击螺弹出右图所示窗然后直接左键单击螺栓part,这时系统会出现“可以模拟机械装置”提示,点击确定CATIA—DMU运动机构CATIA DMU 运动机构6、在左侧树中双击图中高亮显示的旋转结合,在左侧树中双击图中高亮显示的“旋转”结合,便会弹出如右图5所示窗口,在窗口‐360deg和+360deg处可修改角度范围,修改完点击确定;(注意此时机械装置自由度=0,若不为0是不能仿真的,此项尤为重要,下述每个结合均是如此,不再反复强调)图5CATIA—DMU运动机构CATIA DMU 运动机构点中使用7、点击中的(使用命令进行模拟)按钮,弹出右图6所示窗口,点击“模拟”下的“立刻”按钮,便可拖动上面的游标随意旋转;也可使用“按需要”命令,修改一下右上角数字框中的数据,就可点击下方的箭头标示,使构件自行转动;图6箭头标示使构件自行转动CATIA—DMU运动机构CATIA DMU 运动机构•:棱形结合棱形结合1、单击(棱形结合)按钮,弹出如右图1所示窗口单击(棱形结合)按钮弹出如右图图12、点击右上角“新机械装置”按钮,弹出图2所示窗口图2 3、单击确定按钮,图1窗口变为图3所示窗口,图3CATIA—DMU运动机构CATIA DMU 运动机构4、窗口中“直线1”、“直线2”、“平面1”、“平面2”、分别选择螺栓轴线、螺母轴线、螺栓中的zx平面、螺母中的zx平面(所选平面必须与所选直线平行),并点选“驱动长度”按钮,如右图4所示,并单击确定;图4CATIA DMU 运动机构CATIA—DMU运动机构5、单击中的按钮,弹出右图所示窗口,然后直接左键单击螺弹出右图所示窗然后直接左键单击螺栓part,这时系统会出现“可以模拟机械装置”提示,点击确定CATIA—DMU 运动机构CATIA DMU 运动机构6、在左侧树中双击图中高亮显示的“棱形”结合,所示窗在窗便会弹出如右图5所示窗口,在窗口‐100mm 和100mm 处可修改长度范围,修改完点击确定;图5CATIA—DMU运动机构CATIA DMU 运动机构点中使用7、点击中的(使用命令进行模拟)按钮,弹出右图6所示窗口,点击“模拟”下的“立刻”按钮,便可拖动上面的游标随意移动;也可使用“按需要”命令,修改一下右上角数字框中的数据,就可点击下方的箭头标示,使构件自行移动;图6箭头标示使构件自行移动CATIA—DMU 运动机构CATIA DMU 运动机构•圆柱结合单击(圆柱结合)按钮弹出如右图图11、单击(圆柱结合)按钮,弹出如右图1所示窗口图22、点击右上角“新机械装置”按钮,弹出图2所示窗口3、单击确定按钮,图1窗口变为图3所示窗口,图3CATIA—DMU 运动机构CATIADMU 运动机构线、螺母轴线,并点选“驱动角度”、“驱动长度”按钮如右图所示并单击确定圆长度”按钮,如右图4所示,并单击确定;(圆图4柱)结合从动件既可沿轴向转动,也可同时沿轴向移动);CATIA DMU 运动机构CATIA—DMU运动机构5、单击中的按钮,弹出右图所示窗口,然后直接左键单击螺弹出右图所示窗然后直接左键单击螺栓part,这时系统会出现“可以模拟机械装置”提示,点击确定CATIA DMU 运动机构CATIA—DMU运动机构6、在左侧树中双击图中高亮显示的“圆柱面”结合,便会弹出如右图5所示窗口,在窗口‐100mm和所示窗在窗100mm处可修改长度范围,在窗口‐360deg和360deg处可修改角度范围,修改完点击确定;图5CATIA—DMU运动机构CATIA DMU 运动机构点中使用7、点击中的(使用命令进行模拟)按钮,弹出右图6所示窗口,点击“模拟”下的“立刻”按钮,便可拖动上面的游标随意移动和转动;也可使用“按需要”命令,修改一下右上角数字框中的数据,就可点击下方的箭头标示,使构件自行移动和转动;图6据就可点击下方的箭头标示使构件自行移动和转动CATIA—DMU 运动机构CATIA DMU 运动机构•螺钉结合单击(螺钉结合)按钮弹出如右图图11、单击(螺钉结合)按钮,弹出如右图1所示窗口图22、点击右上角“新机械装置”按钮,弹出图2所示窗口3、单击确定按钮,图1窗口变为图3所示窗口,图3CATIA—DMU运动机构CATIA DMU 运动机构4、窗口中“直线1”、“直线2”分别选择螺栓轴线、螺母轴线,并点选“驱动角度”、或“驱动长度”按钮,如右图4所示,并单击确定;(螺钉结合可通过驱动角度和螺距的设置控制运动,也可通过驱动长度的设置控制运动);动也可通过驱动长度的设置控制运动)图4CATIA—DMU运动机构CATIA DMU 运动机构5、单击中的按钮,单击弹出右图所示窗口,然后直接左键单击螺栓part,这时系统会出现“可以模拟机械装提示点击确定;装置”提示,点击确定;CATIA DMU 运动机构CATIA—DMU运动机构6、在左侧树中双击图中高亮显示的“螺钉”结合,便会弹出如右图5所示窗口,在窗口“螺距”处所示窗在窗“螺距”处可修改螺栓螺母的螺距,在窗口‐360deg和360deg处可修改角度范围,修改完点击确定;图5CATIA—DMU运动机构CATIA DMU 运动机构点中使用7、点击中的(使用命令进行模拟)按钮,弹出右图6所示窗口,点击“模拟”下的“立刻”按钮,便可拖动上面的游标随意移动和转动;也可使用“按需要”命令,修改一下右上角数字框中的数据,就可点击下方的箭头标示,使构件自行移动和转动;图6据就可点击下方的箭头标示使构件自行移动和转动CATIA—DMU 运动机构CATIA DMU 运动机构•球面结合(球头连接)单击(螺钉结合)按钮弹出如右图图11、单击(螺钉结合)按钮,弹出如右图1所示窗口图22、点击右上角“新机械装置”按钮,弹出图2所示窗口3、单击确定按钮,图1窗口变为图3所示窗口,图3CATIA—DMU 运动机构CATIA DMU 运动机构4、在窗口中,点1点选球头面,自动识别球心;在窗口中,点点2点选球套面,自动识别球心位置,如右图所示可先在p中建球点4所示,也可先在part 中建立球心点,前后然后点选时只需直接选取点就行,选选取完之后点击确定,点击确定之后,两球心会相合在一起;4图CATIA DMU 运动机构CATIA—DMU运动机构5、单击中的按钮,此时系统并未自动弹出“可以模拟机械装置”窗口,在树中打开“机械装置”,发现此时的自由度=3,并不等于0,所以只有球面结合和固定件的情况下,是“球面结合”和“固定件”的情况下是不能进行仿真的,“球面结合”必须和其他带有驱动性质的结合一起使用;CATIA DMU 运动机构CATIA—DMU运动机构•平面结合平面结合和球面结合的步骤基本一样,并且只是约束平面结合和固定件的话机械装置的自由度也不为0,需要和别需要和别的带有驱动性质的结合在一起使用;的带有驱动性质的结合在起使用CATIA—DMU运动机构CATIA DMU 运动机构•刚性结合刚性结指将零件具有动式零件刚性结合是指将零件与已经具有运动形式的零件固定在一起,与其做相同的运动,或是与固定件绑定在一起不做运动;窗口中的“零件1”选择已经具有运动形式零件,“零件2”选择要与之刚性结合的零件;CATIA—DMU运动机构CATIA DMU 运动机构•点曲线结合点曲线结合是指一个part以本身的一个点与另外一各part点曲线结合是指个t以本身的个点与另外各t 中的一条曲线连接点沿着曲线方向移动中的一条曲线连接,点沿着曲线方向移动;CATIA—DMU运动机构CATIA DMU 运动机构将曲线固定后,这时系统并不会提示“可以模拟机械装置”,如右图所示,机械装置的自由度=3,并不为0,因为点所在的part并没限制本身的旋转自由度,所以点曲面结合也需要与其他具有驱动特性的结合配合使用;CATIA DMU 运动机构CATIA—DMU运动机构•滑动曲线结合滑动曲线结合,顾名思义就是一条曲线沿着另一条曲线滑动,但仅仅曲线沿着另一条曲线滑动但仅仅约束滑动结合,机械装置的自由度还不为0,必须要与其他形式的结合配合使用;CATIA DMU 运动机构CATIA—DMU运动机构•滚动曲线结合滚动曲线结合,顾名思义就是一条曲线沿着另一条曲线滚动,但仅仅曲线沿着另一条曲线滚动但仅仅约束滚动结合,机械装置的自由度还不为0,必须要与其他形式的结合配合使用;CATIA DMU 运动机构CATIA—DMU运动机构•点曲面结合点曲面结合,顾名思义就是一个点在一个曲面上运动,但这是远远不够的,无论是方向还是转动的自由度都没有约束完全,方向还是转动的自由度都没有约束完全所以是不能够模拟仿真,也需要与其他形式的结合一起使用;CATIA DMU 运动机构CATIA—DMU运动机构•通用结合通用结合是两个旋转结合的复合,将第一个旋转结合进行驱动的设置,第二个旋转不用设置驱动,通过通用结合,就是将第二个旋转结合的旋转零件的轴线与第个旋转结合的旋转零件的轴线连接起来,成为第个旋转件的轴线与第一个旋转结合的旋转零件的轴线连接起来成为第一个旋转零件的从动件;具体操作如下:CATIA DMU 运动机构CATIA—DMU运动机构1、在蓝色零件和灰色零件之间建立旋转结合,命名为“旋转1”,并设置“驱动角度”;CATIA DMU 运动机构CATIA—DMU运动机构2、分别在绿色零件与灰色零件、浅蓝色零件和灰色零件之间建立旋转分别在绿色零件与灰色零件浅蓝色零件和灰色零件之间建立旋转结合,分别命名为“旋转2”、“旋转3”,这两个旋转都不设置“驱动角度”,并将灰色零件设置为固定件;旋转2旋转3CATIA DMU 运动机构CATIA—DMU运动机构3、点击(通用结合)按钮,出现如下图所示窗口,“旋转1”处选择蓝色零件轴线,“旋转2”处选择绿色零件轴线,“十字销轴线方向”选择“垂直于旋转2”,点击确定;CATIA DMU 运动机构CATIA—DMU运动机构4、重复使用通用结合,如下图所示:“旋转1”选择绿色零件轴线,“旋”选择浅蓝色零件“十字销轴线”选择“垂直于旋转”点击确转2选择浅蓝色零件,十字销轴线选择垂直于旋转1,点击确定之后,系统便会提示“可以模拟机械装置”;CATIA—DMU运动机构CATIA DMU 运动机构操作完成后,具体树的情况见右图,图中两个U形接合右图,图中两个“形接合”便是通用结合;CATIA DMU 运动机构CATIA—DMU运动机构•CV结合CV结合与通用结合一样,CV结合只是可以同时识别连接三个旋转结合,并且也是只需第一个旋转结合设置驱动角度就行,后两个旋转结合都是随动件;CATIA DMU 运动机构CATIA—DMU运动机构展开左边的树可以发现展开左边的树,可以发现,cv结合就是两个通用结合的复合,而通用结合就是两个旋转结合的复合;CATIA DMU 运动机构CATIA—DMU运动机构•齿轮结合齿轮结合也是复合结合,也要识别两个旋转结合,所以首先要在两个齿轮和支座之间建立旋转结合;CATIA—DMU运动机构CATIA DMU 运动机构点击齿轮结合,窗口中的旋转结合1、口中的“旋转结合”“旋转结合2”分别要在树中选取;比率填写小齿轮与大齿轮的分度圆直径比;旋转方向,紧挨着的两个齿轮方向相反,若两齿轮间默认有中间齿轮话,则方向相同;驱动角度依据具体情况选取主从动关系;CATIA—DMU运动机构CATIA DMU 运动机构•架子结合架子结指就轮架子结合指的就是齿轮齿条的运动结合,也是复合结合,首先要在齿条和支座之间建立棱形结合,在齿轮和支座之间建立旋转结合,建立完成之后,如右图树中所示;CATIA DMU 运动机构CATIA—DMU运动机构点击架子结合,弹出右上图,“棱形结合”处在树中选择“棱形.1”,“旋转结合”选择“旋转.2”;比率处选择定义,弹出右中图所示窗口,“半径”处选取齿轮分度圆直径,窗口会自动生成比率,点击确定,会转至右图下所示窗口;驱动方式的地方,根据具体情况选取“棱形的驱动长度”或是“旋转示窗口驱动方式的地方根据具体情况选取“棱形的驱动长度”或是“旋转的驱动角度”,点击确定完成,即可模拟仿真;CATIA—DMU运动机构CATIA DMU 运动机构•电缆结合电缆结合是指将两个滑块用虚拟滑轮通过虚拟滑轮连接起来,所以要先在绿色滑块与支撑座、蓝色滑块与支撑座之间建立棱形结合,并在“棱形1”结合中设置驱动长度,将支撑座设置为固定件;CATIA DMU 运动机构CATIA—DMU运动机构点击按钮,弹出如右上图所示窗口,图中“棱形结合1”在左边树中选取“棱形.1”,“棱形结合2”在树中选取“棱形.2”,比率根据实际数据进行填写,驱动方式选取“棱形1的”驱动长度,设置完之后点击确定,会提示“可驱动长度设置完之后点击确定会提示“可以模拟机械装置”;。
CATIA命令详解第一章概述一、CATIA的工作模式对于同一模型,有两种工作模式.1.SPACE工作模式,缩写为SP:允许用户在三维空间或3D中设计和构造物体,它在屏幕上用三维坐标表示.2.DRAW工作模式,缩写为DR:允许用户通过平面来设计和构造物体,它在屏幕上用一两个坐标系,V(水平,垂直)来表示.二、功能键盘: 键盘由可被指定的32个键组成. 除F9,F10,F11,F12四键被指定:FILE功能, INTERRUPT插入,YES是,NO不是, 其它可通过调用常设功能KEY或FILE功能的KEYBOARD自定.三、鼠标的三个键:1.用来选择(select)光标所指的元素和项.2.用来指定(indicate)光标所指的位置和区域.3.用来移动(move)模型.四、提示信息:"SEL"=按鼠标第一键进行选择(select)"IND"=按鼠标第二键来指定(indication)"KEY"=键入(key in)用字符数字键盘给定的数值或标识符* 斜杠/分隔同一交互中的各选择.如:"SEL LN/CRV"= 选一条直线或一曲线* 双斜杠//分隔不同的交互如:"KEY DIST//IND REGION"= 键入距离或指定区域* 逗号分隔程序所需的所有数据如:"KEY DX,DY,DZ"=键入沿x,y,z轴的增量* 括号( )分隔必需数字和任选数字如:"KEY DIST(,NUM)"= 键入距离,并且需要时键入数目.* 符号< >指明可以使用邻近探测如:"SEL PT<LN/CRV> "=可以选一条线或曲线以便选一点: 所选曲线或直线上最靠近的端点被考虑.多元素选择提示:"WSP MULTI(多的)-SEL":当前工作空间的所有元素可以选择"CUR MULTI-SEL":只属于当前集的元素可以被选多元素选择的示例:1.按元素类型选:*PT:选所有的点2.按图形规范选:*COL**(**为颜色号)选所有具有**颜色的元素3.按元素组织选:*GRP*:选所有属于GRP*组织的所有元素4.由若干范畴的组合选:*PT+*LN:选所有的点和线*VOL&*LAY××:选择位于××层的所有体指定的分隔符:+ == 加- == 减& == 交5.具有不同特征的多元素选则:*SEL并选元素:所选元素被考虑*TRP并指定点:选择陷井内的部分或全部元素错误信息提示:"INVALID INPUT":键入的值无效"FILE NOT FOUDN":包含键入字符串的文件不存在"EMPTY BATCH":所显示的属于当前工作空间的元素中没有与多元素选择范畴相应的元素"BATCH PARTIALLY PROCESSEND":某些元素未被考虑五、启动CATIA的工作过程:1.键入用户所属组名,然后按ENTER键.2.键入用户口令,然后按ENTER键.3.屏幕显示CATIA操作系统和版本号,还显示一个菜单:COLD START(冷启动),WARM START(热启动),LEFT (使菜单能够在屏幕左端显示, 然后该项变为RIGHT.用户必须选COLD START或WARM START.一般选COLD START, 但由于某种原因模型丢失一定要用WARM START.4.CATIA起动后FILE功能自动被激活.六、FILE功能的主菜单:不显示该模型.VISUALTN(看得见):显示该模型.WRTEFILE(接收):定义接收文件.DELETE(删除):在当前文件中删除模型.DIRECT: 不显示该模型.VISUALTN: 显示该模型.MOVE(移动):将模型移动到另一文件中.DIRECT: 不显示该模型.VISUALTN: 显示该模型. WRTEFILE:定义接收文件.RENAME(改名):修改模型名.CREATE(生成):生成新模型.XY: XY平面将成为第一个DRAW视图的投影平面.YZ: YZ平面将成为第一个DRAW视图的投影平面.XZ: XZ平面将成为第一个DRAW视图的投影平面. CALL SV:恢复用SV常设功能存储的模型.COMMETNT(注解):对模型加注解.KEYBOARD(键盘):guarantee for the great struggle. This aspects XI General Secretary of speech main including exercise thrift, against extravagance mass line is party of lifeline and fundamental work route accurate grasp party of mass line education practice activities of guideline and target requirements set and develop "three strict three real" of style put power shut into system of cage in using history wisdom advance anti-corruption construction in-depth advance style clean government and anti-corruption struggle develop nail nail of spirit, a Zhang good of blueprint worked to... 9. other aspects. 18 big yilai, XI General Secretary also respectively on diplomatic, and military, and ecological construction, aspects published has important speech, covers has construction ecological civilization, and advance defense and army modern, and rich "one country, two systems" practice and advance country unified, and go peace development road, and promoted building new powers relationship, and go good around diplomatic work, and strengthening and developing countries solidarity cooperation, and active participation multilateral affairs, and science of thinking and work method, many aspects. XI Jinping, Secretary of a series of important speeches, and further enrich and develop the party's theory, line, principles and policies, the party puts forward new requirements for more contemporary features, the latest achievement of Marxism in China, is a guide to persisting and developing socialism with Chinese characteristics. Four methods. To address the relationship between comprehensive and focused on science. In the process of learning, we should follow as a good study and carry out the "wise men" to conduct a comprehensive collaborative learning; and with their own jobs, focus research and understanding spirit, grasp the potential requirements. For example, every party member should be according to the various branches of learning program, an article does not go into a link, no leakage of conducting a comprehensive study, and combined with their own duties and responsibilities, be focused and targeted Geoscience. Like, leaders to highlight learning XI on ruling acting political know of deep love of cut dry in practice go in forefront of river new language out poverty XI on coordination advance "four a full" strategy layout discusses excerpts XI on full deepening reform discusses excerpts XI on full law ruling discusses excerpts 18 big yilai XI on major economic problem discusses excerpts, discipline to highlight learning XI on strict party of discipline and rules discusses excerpts XI Jinping, on the construction of clean and honest Government and fight against corruption discussed excerpts, technology to highlight the learning of the XI Jinping on technological innovation and discusses excerpts, XI Jinping, education should highlight the important excerpts of work on education and so on. To address the relation between stage and often science. Phase has the advantage of time to focus on fast, to highlight the theme, focused, result; often learn the advantages of flexible fit, form, subtle, continues to CATIA命令详解deepen. In General, periodic high priority on learning, easy to grasp and practice: recurrent learning factors, long time, prone to "sluggish". Learning programmes are explicitly required to learn education is not an event, but to highlight the normal education, differentiated levels, heart, catch a fine practice, the real party's ideological and political construction in the everyday, often. This requires that we do a good job phase focused learning based on knowledge contests, comments on rewards in the form, pay special attention to recurring studies. To handle the relationship between solid strong to learn and a lot to learn. For any unit or individual, objectively speaking, in the process of carrying out the party Constitution Party rules and spirit, there is a problem with strong and weak, which we need to pay attention to the actual learning content, and handle the relationship between solid strong to learn and a lot to learn. On one hand, we must always keep a humble attitude, good deal, Continue the hardening. The other hand, always keep the spirit of energetic, pegged to the weak link to find gaps, fill the short Board. Short Board issues should not be underestimated, the saying goes, have short Board, add a short. This tells us, there are weaknesses shortcomings and do not be afraid, fear is a blind eye and not to repair, the result is poor is worse and the weak weaker. United States politics home zhamusi, and Wilson and prevention crime learn experts qiaozhikailin proposed has a famous of broken window theory, that, if a building House has a fan window of glass broken has, and this fan Windows no get timely repair, others on May to broke more of window glass, time a long, these damaged of window on to people caused a disorder, and matter of feel, results in this mass errors think no attention, and no management of atmosphere Xia, some bad culture, and violations behavior on will breeding and spread. Reality life in the is such, clean of wall Shang, suddenly was posted has a Zhang ad, if didn't people management, not out days this wall Shang on will appeared greatly small many of advertising; private take mess built phenomenon is so, began circle a small block to built a small shed put things, if didn't people timely stop, he on dare built a hut live people, time long has didn't people tube, wants to tube Shi on difficult has. Therefore, the solid strong is important, a lot to learn is also important. Third, key, grasp the learning objective of education is to train a qualified party member "two" study and education to its core essence is learning and doing.Learning and doing are mutually reinforcing, if optical can't do, study leave, real learning deficiency, while sweating, wind and water, "one fishing white" became "fake words and not the mules". Learning party rules did not comply with the party Constitution, address the learning series is not used, instead, learn and do, imagine this "learning", how do you meet the eligibility requirements of party members. Therefore, the "two" basic learning, the key is in use, do, line. In particular, is a qualified party members to grasp the following three points. To strengthen "four第5 页共77 页管理功能键盘.RECALL(调用):调用已存功能键盘.STORE(存储):存储功能键盘.DELETE:删除功能键盘.EXIT(退出):结束CATIA工作过程.3.操作步骤:读模型:FILE+FILEFILE+READ(1)工作文件的选择:键入包含有所需文 "KEY STRING(字符串)"件名称的第一字符串. "SEL FILE//KEY STRING"或按"ENTER"键显示可用文件的列表.用鼠标第一键选择.(2)所读模型的选择:键入包含有所需模型的一字符串. "KEY STRING"或按"ENTER"键显示当前文件中的模型列表."SEL MODEL//KEY STRING"用鼠标第一键选择.当列表包括若干个"屏幕页"时, 用FWD/BWD(FORWARD向前/BACKWARD向后)命令能够分别显示上页或下页.写模型:FILE+WRITE(1)存储并生成一新模型:键入一新名称来生成新模型,在控制信息中"YES:CURRENT(当前的)ID//KEY NEW ID"显示"MODEL WRITTEN"(模型被写入)信息.(2)存储并代替原图型:A:按YES键保持原始模型的标识符.B:再按YES键,接受对存储在当前文件中的原始模型的代替.注:还可以把模型存入另一文件中:A:选FILE项.B:选存入模型所需文件.C:选WRITE项.D:键入存入模型的名称.退出CATIA工作过程:FILE+EXIT按YES键结束CATIA工作过程.生成模型:FILE+CREATE(生成)+YZ(1)按YES键确认空模型的生成: "YES:CONFIRM(确认)"在控制区显示"MODEL CREATED"(模型被生成)(2)完成模型几何形状的构造.定义功能键盘:FILE+KEYBOARD(键盘)+RECALL(1)在列表中选一功能. "SEL FUNCTION(功能)"(2)在屏幕上选一功能键:所选功能被付给所选键."KEY//SEL FUNCTION"(3)按需要重复操作若干次,直至获得所需功能键盘.注:还可以用KEY常设功能来定义功能键盘.BLANK命令清除功能键盘.SORT命令将功能键按字母排序.存储功能键盘:FILE+KEYBOARD+STORE(1)键入新功能键盘的标识符(至多8字符) "SEL KEYBOARD//在控制信息区显示KEY KEYBOARD ID""KEYBOARD STORED"(键盘被存储)guarantee for the great struggle. This aspects XI General Secretary of speech main including exercise thrift, against extravagance mass line is party of lifeline and fundamental work route accurate grasp party of mass line education practice activities of guideline and target requirements set and develop "three strict three real" of style put power shut into system of cage in using history wisdom advance anti-corruption construction in-depth advance style clean government and anti-corruption struggle develop nail nail of spirit, a Zhang good of blueprint worked to... 9. other aspects. 18 big yilai, XI General Secretary also respectively on diplomatic, and military, and ecological construction, aspects published has important speech, covers has construction ecological civilization, and advance defense and army modern, and rich "one country, two systems" practice and advance country unified, and go peace development road, and promoted building new powers relationship, and go good around diplomatic work, and strengthening and developing countries solidarity cooperation, and active participation multilateral affairs, and science of thinking and work method, many aspects. XI Jinping, Secretary of a series of important speeches, and further enrich and develop the party's theory, line, principles and policies, the party puts forward new requirements for more contemporary features, the latest achievement of Marxism in China, is a guide to persisting and developing socialism with Chinese characteristics. Four methods. To address the relationship between comprehensive and focused on science. In the process of learning, we should follow as a good study and carry out the "wise men" to conduct a comprehensive collaborative learning; and with their own jobs, focus research and understanding spirit, grasp the potential requirements. For example, every party member should be according to the various branches of learning program, an article does not go into a link, no leakage of conducting a comprehensive study, and combined with their own duties and responsibilities, be focused and targeted Geoscience. Like, leaders to highlight learning XI on ruling acting political know of deep love of cut dry in practice go in forefront of river new language out poverty XI on coordination advance "four a full" strategy layout discusses excerpts XI on full deepening reform discusses excerpts XI on full law ruling discusses excerpts 18 big yilai XI on major economic problem discusses excerpts, discipline to highlight learning XI on strict party of discipline and rules discusses excerpts XI Jinping, on the construction of clean and honest Government and fight against corruption discussed excerpts, technology to highlight the learning of the XI Jinping on technological innovation and discusses excerpts, XI Jinping, education should highlight the important excerpts of work on education and so on. To address the relation between stage and often science. Phase has the advantage of time to focus on fast, to highlight the theme, focused, result; often learn the advantages of flexible fit, form, subtle, continues to CATIA命令详解deepen. In General, periodic high priority on learning, easy to grasp and practice: recurrent learning factors, long time, prone to "sluggish". Learning programmes are explicitly required to learn education is not an event, but to highlight the normal education, differentiated levels, heart, catch a fine practice, the real party's ideological and political construction in the everyday, often. This requires that we do a good job phase focused learning based on knowledge contests, comments on rewards in the form, pay special attention to recurring studies. To handle the relationship between solid strong to learn and a lot to learn. For any unit or individual, objectively speaking, in the process of carrying out the party Constitution Party rules and spirit, there is a problem with strong and weak, which we need to pay attention to the actual learning content, and handle the relationship between solid strong to learn and a lot to learn. On one hand, we must always keep a humble attitude, good deal, Continue the hardening. The other hand, always keep the spirit of energetic, pegged to the weak link to find gaps, fill the short Board. Short Board issues should not be underestimated, the saying goes, have short Board, add a short. This tells us, there are weaknesses shortcomings and do not be afraid, fear is a blind eye and not to repair, the result is poor is worse and the weak weaker. United States politics home zhamusi, and Wilson and prevention crime learn experts qiaozhikailin proposed has a famous of broken window theory, that, if a building House has a fan window of glass broken has, and this fan Windows no get timely repair, others on May to broke more of window glass, time a long, these damaged of window on to people caused a disorder, and matter of feel, results in this mass errors think no attention, and no management of atmosphere Xia, some bad culture, and violations behavior on will breeding and spread. Reality life in the is such, clean of wall Shang, suddenly was posted has a Zhang ad, if didn't people management, not out days this wall Shang on will appeared greatly small many of advertising; private take mess built phenomenon is so, began circle a small block to built a small shed put things, if didn't people timely stop, he on dare built a hut live people, time long has didn't people tube, wants to tube Shi on difficult has. Therefore, the solid strong is important, a lot to learn is also important. Third, key, grasp the learning objective of education is to train a qualified party member "two" study and education to its core essence is learning and doing.Learning and doing are mutually reinforcing, if optical can't do, study leave, real learning deficiency, while sweating, wind and water, "one fishing white" became "fake words and not the mules". Learning party rules did not comply with the party Constitution, address the learning series is not used, instead, learn and do, imagine this "learning", how do you meet the eligibility requirements of party members. Therefore, the "two" basic learning, the key is in use, do, line. In particular, is a qualified party members to grasp the following three points. To strengthen "four第7 页共77 页(2)功能键盘存入时可以代替已存在键盘("YES: REPLACE")或生成新键盘("KEY NEWID").七、生成的元素:1.在SPACE 3D或2D模式下生成的元素称为空间元素(SPACE元素)2.从3D转化到2D:用常设功能区的3D/2D转换开关能够从3D转换到2D.A:在常设功能区选开关3D.B:键入所要求的平面方程 "KEY PLN//YES:3D或选共面元素或选坐标的一轴. "SEL PT/LN/CRV/PLN/AXS/DRW ELEM"3.从2D转化到3D:A:选转化开关2D.B:按YES键(YES:3D)确认.4.当前工作平面与屏幕平行显示:A:选常设功能WI(窗口).B:键入"P",即平行平面. "KEY WINW ID//SEL NINW"当前平面的坐标系为与图形屏幕平行.5.使初始模型重新显示:A:选常设功能WI.B:键入"XYZ",获得初始透视图.第二章点(POINT)功能一、图解:POINT 2DPOINT3D二、定义:* PROJ/INT(PROJECT投影/INTERSEITION交点):通过法向投影,交点或两点来生成一点. SINGLE(单个):仅进行一次生成操作.guarantee for the great struggle. This aspects XI General Secretary of speech main including exercise thrift, against extravagance mass line is party of lifeline and fundamental work route accurate grasp party of mass line education practice activities of guideline and target requirements set and develop "three strict three real" of style put power shut into system of cage in using history wisdom advance anti-corruption construction in-depth advance style clean government and anti-corruption struggle develop nail nail of spirit, a Zhang good of blueprint worked to... 9. other aspects. 18 big yilai, XI General Secretary also respectively on diplomatic, and military, and ecological construction, aspects published has important speech, covers has construction ecological civilization, and advance defense and army modern, and rich "one country, two systems" practice and advance country unified, and go peace development road, and promoted building new powers relationship, and go good around diplomatic work, and strengthening and developing countries solidarity cooperation, and active participation multilateral affairs, and science of thinking and work method, many aspects. XI Jinping, Secretary of a series of important speeches, and further enrich and develop the party's theory, line, principles and policies, the party puts forward new requirements for more contemporary features, the latest achievement of Marxism in China, is a guide to persisting and developing socialism with Chinese characteristics. Four methods. To address the relationship between comprehensive and focused on science. In the process of learning, we should follow as a good study and carry out the "wise men" to conduct a comprehensive collaborative learning; and with their own jobs, focus research and understanding spirit, grasp the potential requirements. For example, every party member should be according to the various branches of learning program, an article does not go into a link, no leakage of conducting a comprehensive study, and combined with their own duties and responsibilities, be focused and targeted Geoscience. Like, leaders to highlight learning XI on ruling acting political know of deep love of cut dry in practice go in forefront of river new language out poverty XI on coordination advance "four a full" strategy layout discusses excerpts XI on full deepening reform discusses excerpts XI on full law ruling discusses excerpts 18 big yilai XI on major economic problem discusses excerpts, discipline to highlight learning XI on strict party of discipline and rules discusses excerpts XI Jinping, on the construction of clean and honest Government and fight against corruption discussed excerpts, technology to highlight the learning of the XI Jinping on technological innovation and discusses excerpts, XI Jinping, education should highlight the important excerpts of work on education and so on. To address the relation between stage and often science. Phase has the advantage of time to focus on fast, to highlight the theme, focused, result; often learn the advantages of flexible fit, form, subtle, continues to CATIA命令详解deepen. In General, periodic high priority on learning, easy to grasp and practice: recurrent learning factors, long time, prone to "sluggish". Learning programmes are explicitly required to learn education is not an event, but to highlight the normal education, differentiated levels, heart, catch a fine practice, the real party's ideological and political construction in the everyday, often. This requires that we do a good job phase focused learning based on knowledge contests, comments on rewards in the form, pay special attention to recurring studies. To handle the relationship between solid strong to learn and a lot to learn. For any unit or individual, objectively speaking, in the process of carrying out the party Constitution Party rules and spirit, there is a problem with strong and weak, which we need to pay attention to the actual learning content, and handle the relationship between solid strong to learn and a lot to learn. On one hand, we must always keep a humble attitude, good deal, Continue the hardening. The other hand, always keep the spirit of energetic, pegged to the weak link to find gaps, fill the short Board. Short Board issues should not be underestimated, the saying goes, have short Board, add a short. This tells us, there are weaknesses shortcomings and do not be afraid, fear is a blind eye and not to repair, the result is poor is worse and the weak weaker. United States politics home zhamusi, and Wilson and prevention crime learn experts qiaozhikailin proposed has a famous of broken window theory, that, if a building House has a fan window of glass broken has, and this fan Windows no get timely repair, others on May to broke more of window glass, time a long, these damaged of window on to people caused a disorder, and matter of feel, results in this mass errors think no attention, and no management of atmosphere Xia, some bad culture, and violations behavior on will breeding and spread. Reality life in the is such, clean of wall Shang, suddenly was posted has a Zhang ad, if didn't people management, not out days this wall Shang on will appeared greatly small many of advertising; private take mess built phenomenon is so, began circle a small block to built a small shed put things, if didn't people timely stop, he on dare built a hut live people, time long has didn't people tube, wants to tube Shi on difficult has. Therefore, the solid strong is important, a lot to learn is also important. Third, key, grasp the learning objective of education is to train a qualified party member "two" study and education to its core essence is learning and doing.Learning and doing are mutually reinforcing, if optical can't do, study leave, real learning deficiency, while sweating, wind and water, "one fishing white" became "fake words and not the mules". Learning party rules did not comply with the party Constitution, address the learning series is not used, instead, learn and do, imagine this "learning", how do you meet the eligibility requirements of party members. Therefore, the "two" basic learning, the key is in use, do, line. In particular, is a qualified party members to grasp the following three points. To strengthen "four第9 页共77 页REPEAT(重复):依次进行若干次操作所选第一个元素是下一被选生成点的参考元素.LIM ON/OFF:OFF 相交或投影点可以在所选元素之外.ON 相交或投影点仅在所选元素限定内.* COORD: 用相对一已有点的相对坐标或绝对坐标来生成点.SINGLE:仅进行一次生成操作.REPEAT:依次进行若干次操作.所选第一个元素是下一生成点的原点.CHAIN(链式): 链式生成操作.最后生成点用作生成新点的原点.* LIMITS: 在LN,CRV,SUR,FAC等元素生成端点.* SPACES: 在元素上生成等距离点.* TANGENT(切点): 在平面曲线上生成切点.* PROJENT: (2D)生成投影点.ORTHOGNL:所选第一点垂直投影到第二元素上.HORIZONT(水平):所选第一点的投影方向与坐标系水平方向相同.VERTICAL(垂直):所选第一点的投影方向与坐标系垂直方向相同.HOR-VERT:所选第一点的投影方向与坐标系水平方向相同, 所选第二点的投影方向与坐标系垂直方向相同.VERT-HOR:所选第一点的投影方向与坐标系垂直方向相同, 所选第二点的投影方向与坐标系水平方向相同.UNSPEC: 用户定义第一点的投影方向.* GRID: 建立点网格.LIMITE: 建立有限的点网格.UNLIM : 建立点的无限网格.CREATE:建立点的网格.DELETE:删除一个点的网格.VISUALTN:显示点的网格.NORMAL:建立平行于当前两坐标轴的正交网格点.UNSPEC:建立一般网格点或一般正交网格点.三、步骤:1.生成两相交直线的交点:POINT+PROJ/INT+SINGLE+LIM ON1.选一直线."WPS MULTI(多)-SELSEL 1ST ELEM"2)选另一直线或用多元素选择多条直线.(如:*LN)"WPS MULTI-SELSEL 2ND ELEM"注:信息区显示:"1 POINT CREATED"2.生成两点的中点:POINT+PROJ/INT+SINGLE+LIM ON1.选一点."WPS MULTI-SELSEL 1ST ELEM"2)选第二点."WPS MULTI-SELSEL 2ND ELEM"3.用坐标生成点:POINT+COORD+SINGLE(选一点,一直线或曲线的末端.)"WPS MULTI-SEL键入要生成点相对坐标系原点沿X,Y和Z的坐标.SEL PT<LN/CRV>//KEY X,Y,Z"或键入沿X,Y,和Z轴的增量."KEY DX,DY,DZ//YES:STD"guarantee for the great struggle. This aspects XI General Secretary of speech main including exercise thrift, against extravagance mass line is party of lifeline and fundamental work route accurate grasp party of mass line education practice activities of guideline and target requirements set and develop "three strict three real" of style put power shut into system of cage in using history wisdom advance anti-corruption construction in-depth advance style clean government and anti-corruption struggle develop nail nail of spirit, a Zhang good of blueprint worked to... 9. other aspects. 18 big yilai, XI General Secretary also respectively on diplomatic, and military, and ecological construction, aspects published has important speech, covers has construction ecological civilization, and advance defense and army modern, and rich "one country, two systems" practice and advance country unified, and go peace development road, and promoted building new powers relationship, and go good around diplomatic work, and strengthening and developing countries solidarity cooperation, and active participation multilateral affairs, and science of thinking and work method, many aspects. XI Jinping, Secretary of a series of important speeches, and further enrich and develop the party's theory, line, principles and policies, the party puts forward new requirements for more contemporary features, the latest achievement of Marxism in China, is a guide to persisting and developing socialism with Chinese characteristics. Four methods. To address the relationship between comprehensive and focused on science. In the process of learning, we should follow as a good study and carry out the "wise men" to conduct a comprehensive collaborative learning; and with their own jobs, focus research and understanding spirit, grasp the potential requirements. For example, every party member should be according to the various branches of learning program, an article does not go into a link, no leakage of conducting a comprehensive study, and combined with their own duties and responsibilities, be focused and targeted Geoscience. Like, leaders to highlight learning XI on ruling acting political know of deep love of cut dry in practice go in forefront of river new language out poverty XI on coordination advance "four a full" strategy layout discusses excerpts XI on full deepening reform discusses excerpts XI on full law ruling discusses excerpts 18 big yilai XI on major economic problem discusses excerpts, discipline to highlight learning XI on strict party of discipline and rules discusses excerpts XI Jinping, on the construction of clean and honest Government and fight against corruption discussed excerpts, technology to highlight the learning of the XI Jinping on technological innovation and discusses excerpts, XI Jinping, education should highlight the important excerpts of work on education and so on. To address the relation between stage and often science. Phase has the advantage of time to focus on fast, to highlight the theme, focused, result; often learn the advantages of flexible fit, form, subtle, continues to CATIA命令详解deepen. In General, periodic high priority on learning, easy to grasp and practice: recurrent learning factors, long time, prone to "sluggish". Learning programmes are explicitly required to learn education is not an event, but to highlight the normal education, differentiated levels, heart, catch a fine practice, the real party's ideological and political construction in the everyday, often. This requires that we do a good job phase focused learning based on knowledge contests, comments on rewards in the form, pay special attention to recurring studies. To handle the relationship between solid strong to learn and a lot to learn. For any unit or individual, objectively speaking, in the process of carrying out the party Constitution Party rules and spirit, there is a problem with strong and weak, which we need to pay attention to the actual learning content, and handle the relationship between solid strong to learn and a lot to learn. On one hand, we must always keep a humble attitude, good deal, Continue the hardening. The other hand, always keep the spirit of energetic, pegged to the weak link to find gaps, fill the short Board. Short Board issues should not be underestimated, the saying goes, have short Board, add a short. This tells us, there are weaknesses shortcomings and do not be afraid, fear is a blind eye and not to repair, the result is poor is worse and the weak weaker. United States politics home zhamusi, and Wilson and prevention crime learn experts qiaozhikailin proposed has a famous of broken window theory, that, if a building House has a fan window of glass broken has, and this fan Windows no get timely repair, others on May to broke more of window glass, time a long, these damaged of window on to people caused a disorder, and matter of feel, results in this mass errors think no attention, and no management of atmosphere Xia, some bad culture, and violations behavior on will breeding and spread. Reality life in the is such, clean of wall Shang, suddenly was posted has a Zhang ad, if didn't people management, not out days this wall Shang on will appeared greatly small many of advertising; private take mess built phenomenon is so, began circle a small block to built a small shed put things, if didn't people timely stop, he on dare built a hut live people, time long has didn't people tube, wants to tube Shi on difficult has. Therefore, the solid strong is important, a lot to learn is also important. Third, key, grasp the learning objective of education is to train a qualified party member "two" study and education to its core essence is learning and doing.Learning and doing are mutually reinforcing, if optical can't do, study leave, real learning deficiency, while sweating, wind and water, "one fishing white" became "fake words and not the mules". Learning party rules did not comply with the party Constitution, address the learning series is not used, instead, learn and do, imagine this "learning", how do you meet the eligibility requirements of party members. Therefore, the "two" basic learning, the key is in use, do, line. In particular, is a qualified party members to grasp the following three points. To strengthen "four第11 页共77 页4.生成等距点:POINT+SPACES+PTS1)选一条曲线."SEL ELEMMEDIAN(中央的):YES:ONE PTKEY NUM//ORIGIN:(起始)2)在曲线上选一点为原点.SEL PT<LN/CRV>"3)键入相对原点的距离,并"KEY DIST(,NUM)需要时键入所需的点数.4)如需要时按YES键使生成顺序反向."YES:INV"5.生成曲线的切点:POINT+TANGENT1)选一条曲线,或用多元素选择若干条曲线."CUR MULTI-SELSEL PLANAR CURVE2)选一条直线,或用多元素选择若干条直线."CUR MULTI-SELSEL LN"第三章线(LINE)功能一、图解:LINE(2D)。
CATIA--命令详解基于草图的特征特征是组合起来以组成零件的实体。
这⾥介绍的特征是通过在“草图编辑器(Sketcher)”⼯作台(请参见《草图编辑器⽤户指南》)或在“创成式外形设计(Generative Shape Design)”⼯作台(请参见《创成式外形设计⽤户指南》)中创建的初始轮廓以及曲⾯上应⽤命令获得的。
⼀些操作包括添加材料,另⼀些操作包括移除材料。
在本节中,您将学习如何创建以下特征:创建凸台:单击此图标,选择要拉伸的轮廓,然后在对话框中输⼊所需的参数。
使⽤草图的⼦元素:在“凸台(Pad)”或“凹槽(Pocket)”对话框中右键单击“选择(Selection)”字段,然后选择“转到轮廓定义(Go to Profile Definition)”以显⽰“轮廓定义(Profile Definition)”对话框。
创建“直到下⼀个”凸台:单击此图标,选择要拉伸的轮廓,将“类型(Type)”选项设置为“直到下⼀个 (Up to next)”,然后在对话框中输⼊所需的参数。
创建“直到上⼀个”凸台:单击此图标,选择要拉伸的轮廓,将“类型(Type)”选项设置为“直到上⼀个 (Up to last)”,然后在对话框中输⼊所需的参数。
创建“直到平⾯”凸台:单击此图标,选择要拉伸的轮廓,在对话框中输⼊所需的参数,将“类型(Type)”选项设置为“直到平⾯(`Up to plane)”,然后选择所需的平⾯。
创建“直到曲⾯”凸台:单击此图标,选择要拉伸的轮廓,在对话框中输⼊所需的参数,将“类型(Type)”选项设置为“直到曲⾯(Up to surface)”,然后选择所需的曲⾯。
从曲⾯创建凸台:单击此图标,选择要拉伸的曲⾯,然后输⼊所需的参数。
创建不垂直于草图平⾯的凸台:单击此图标,选择要拉伸的轮廓,展开对话框,输⼊所需的参数,定义拉伸⽅向的新参考。
创建多凸台:单击此图标,选择要拉伸的草图,然后为每个域指定⼀个长度值。
所有涉及的内容只是蜻蜓点水,命令细节方面自己可详细捉摸。
实现机构运动
打开部件后:
1. 固定零件;
2.
定义铰链;
3.为铰链定义驱动(自由度)。
通常各个铰链间无机构关联时,要为每个铰链设定驱动;若 机构间联动,就不必每个都设驱动,只需要给起始的铰链设定驱动即可。
4.当 DOF=0 时,机构可以被仿真。
5. 依次电选这 3 个命令进行设置即可,完成仿真。
其中要求,先调整零件位置,再点 INSERT设定每一帧。
6.最后编译完的 REPLY 即可随时播放。
7.如果机构跨越装配层次,其实对机构本身的分析并不影响,如果你一定要实现类似于动 画的效果,那么可以将机构每层次的运动先分别编译,再利用 组合即可。
至于分析机构,干涉,包罗空间,轨迹也是可以的,命令本身不复杂就不说了。
状态分析
软件可以计算运动的最优路径:如图选项,点播放后,用鼠标拖拽图形至一个动作,完成后
再点播放键,软件会完成起始动作和最终动作间的最优运动。
再点传感器选项,可显示运动 分析,可以图形和 EXCEL表格形式输出。
CATIA命令详解第一章 概述一、CATIA的工作模式对于同一模型,有两种工作模式.1.SPACE工作模式,缩写为SP:允许用户在三维空间或3D中设计和构造物体,它在屏幕上用三维坐标表示.2.DRAW工作模式,缩写为DR:允许用户通过平面来设计和构造物体,它在屏幕上用一两个坐标系,V(水平,垂直)来二、功能键盘: 键盘由可被指定的32个键组成. 除F9,F10,F11,F12四键被指定:FILE功能, INTERRUPT插入,YES是,NO不是, 其它可通过调用常设功能KEY或FILE功能的KEYBOARD自定.三、鼠标的三个键:1.用来选择(select)光标所指的元素和项.2.用来指定(indicate)光标所指的位置和区域.3.用来移动(move)模型.四、提示信息:"SEL"=按鼠标第一键进行选择(select)"IND"=按鼠标第二键来指定(indication)"KEY"=键入(key in)用字符数字键盘给定的数值或标识符* 斜杠/分隔同一交互中的各选择.如:"SEL LN/CRV"= 选一条直线或一曲线* 双斜杠//分隔不同的交互如:"KEY DIST//IND REGION"= 键入距离或指定区域* 逗号分隔程序所需的所有数据如:"KEY DX,DY,DZ"=键入沿x,y,z轴的增量* 括号( )分隔必需数字和任选数字如:"KEY DIST(,NUM)"= 键入距离,并且需要时键入数目.* 符号< >指明可以使用邻近探测如:"SEL PT<LN/CRV> "=可以选一条线或曲线以便选一点: 所选曲线或直线上最靠近的端点被考虑. 多元素选择提示:"WSP MULTI(多的)-SEL":当前工作空间的所有元素可以选择"CUR MULTI-SEL":只属于当前集的元素可以被选多元素选择的示例:1.按元素类型选:*PT:选所有的点2.按图形规范选:*COL**(**为颜色号)选所有具有**颜色的元3.按元素组织选:*GRP*:选所有属于GRP*组织的所有元素4.由若干范畴的组合选:*PT+*LN:选所有的点和线*VOL&*LAY××:选择位于××层的所有体指定的分隔符:+ == 加- == 减& == 交5.具有不同特征的多元素选则:*SEL并选元素:所选元素被考虑*TRP并指定点:选择陷井内的部分或全部元素错误信息提示:"INVALID INPUT":键入的值无效"FILE NOT FOUDN":包含键入字符串的文件不存在"EMPTY BATCH":所显示的属于当前工作空间的元素中没有与多元素选择范畴相应的元素"BATCH PARTIALLY PROCESSEND":某些元素未被考虑五、启动CATIA的工作过程:1.键入用户所属组名,然后按ENTER键.2.键入用户口令,然后按ENTER键.3.屏幕显示CATIA操作系统和版本号,还显示一个菜单:COLD START(冷启动),WARM START(热启动),LEFT (使菜单能够在屏幕左端显示, 然后该项变为RIGHT.用户必须选COLD START或WARM START.一般选COLD START, 但由于某种原因模型丢失一定要用WARM START.4.CATIA起动后FILE功能自动被激活.六、FILE功能的主菜单:1. 图解:FILE2.定义:FILE(文件):定义当前文件.READ(读):读存储在当前文件中的一个模型.WRITE(写):在当前文件中写入当前模型.COPY(拷贝):在文件中复制模型.DIRECT(直接):不显示该模型.VISUALTN(看得见):显示该模型.WRTEFILE(接收):定义接收文件.DELETE(删除):在当前文件中删除模型.DIRECT: 不显示该模型.VISUALTN: 显示该模型.MOVE(移动):将模型移动到另一文件中.DIRECT: 不显示该模型.VISUALTN: 显示该模型. WRTEFILE:定义接收文件.RENAME(改名):修改模型名.CREATE(生成):生成新模型.XY: XY平面将成为第一个DRAW视图的投影平面.YZ: YZ平面将成为第一个DRAW视图的投影平面.XZ: XZ平面将成为第一个DRAW视图的投影平面. CALL SV:恢复用SV常设功能存储的模型.COMMETNT(注解):对模型加注解.KEYBOARD(键盘):管理功能键盘.RECALL(调用):调用已存功能键盘.STORE(存储):存储功能键盘.DELETE:删除功能键盘.EXIT(退出):结束CATIA工作过程.3.操作步骤:读模型:FILE+FILEFILE+READ(1)工作文件的选择:键入包含有所需文 "KEY STRING(字符串)"件名称的第一字符串. "SEL FILE//KEY STRING"或按"ENTER"键显示可用文件的列表.用鼠标第一键选择.(2)所读模型的选择:键入包含有所需模型的一字符串. "KEY STRING"或按"ENTER"键显示当前文件中的模型列表."SEL MODEL//KEY STRING"用鼠标第一键选择.当列表包括若干个"屏幕页"时, 用FWD/BWD(FORWARD向前/BACKWARD向后)命令能够分别显示上页或下页.写模型:FILE+WRITE(1)存储并生成一新模型:键入一新名称来生成新模型,在控制信息中"YES:CURRENT(当前的)ID//KEY NEW ID"显示"MODEL WRITTEN"(模型被写入)信息.(2)存储并代替原图型:A:按YES键保持原始模型的标识符.B:再按YES键,接受对存储在当前文件中的原始模型的代替.注:还可以把模型存入另一文件中:A:选FILE项.B:选存入模型所需文件.C:选WRITE项.D:键入存入模型的名称.退出CATIA工作过程:FILE+EXIT按YES键结束CATIA工作过程.生成模型:FILE+CREATE(生成)+YZ(1)按YES键确认空模型的生成: "YES:CONFIRM(确认)"在控制区显示"MODEL CREATED"(模型被生成)(2)完成模型几何形状的构造.定义功能键盘:FILE+KEYBOARD(键盘)+RECALL(1)在列表中选一功能. "SEL FUNCTION(功能)"(2)在屏幕上选一功能键:所选功能被付给所选键."KEY//SEL FUNCTION"(3)按需要重复操作若干次,直至获得所需功能键盘.注:还可以用KEY常设功能来定义功能键盘.BLANK命令清除功能键盘.SORT命令将功能键按字母排序.存储功能键盘:FILE+KEYBOARD+STORE(1)键入新功能键盘的标识符(至多8字符) "SEL KEYBOARD//在控制信息区显示KEY KEYBOARD ID""KEYBOARD STORED"(键盘被存储)(2)功能键盘存入时可以代替已存在键盘("YES: REPLACE")或生成新键盘("KEY NEW ID").七、生成的元素:1.在SPACE 3D或2D模式下生成的元素称为空间元素(SPACE元素)2.从3D转化到2D:用常设功能区的3D/2D转换开关能够从3D转换到2D.A:在常设功能区选开关3D.B:键入所要求的平面方程 "KEY PLN//YES:3D或选共面元素或选坐标的一轴. "SEL PT/LN/CRV/PLN/AXS/DRW ELEM"3.从2D转化到3D:A:选转化开关2D.B:按YES键(YES:3D)确认.4.当前工作平面与屏幕平行显示:A:选常设功能WI(窗口).B:键入"P",即平行平面. "KEY WINW ID//SEL NINW"当前平面的坐标系为与图形屏幕平行.5.使初始模型重新显示:A:选常设功能WI.B:键入"XYZ",获得初始透视图.第二章 点(POINT)功能一、图解:POINT 2DPOINT3D二、定义:* PROJ/INT(PROJECT投影/INTERSEITION交点):通过法向投影,交点或两点来生成一点. SINGLE(单个):仅进行一次生成操作.REPEAT(重复):依次进行若干次操作所选第一个元素是下一被选生成点的参考元素.LIM ON/OFF:OFF 相交或投影点可以在所选元素之外.ON 相交或投影点仅在所选元* COORD: 用相对一已有点的相对坐标或绝对坐标来生成点.SINGLE:仅进行一次生成操作.REPEAT:依次进行若干次操作.所选第一个元素是下一生成点的原点.CHAIN(链式): 链式生成操作.最后生成点用作生成新点的原点.* LIMITS: 在LN,CRV,SUR,FAC等元素生成端点.* SPACES: 在元素上生成等距离点.* TANGENT(切点): 在平面曲线上生成切点.* PROJENT: (2D)生成投影点.ORTHOGNL:所选第一点垂直投影到第二元素上.HORIZONT(水平):所选第一点的投影方向与坐标系水平方向相同.VERTICAL(垂直):所选第一点的投影方向与坐标系垂直方向相同.HOR-VERT:所选第一点的投影方向与坐标系水平方向相同, 所选第二点的投影方向与坐标系垂直方向相同.VERT-HOR:所选第一点的投影方向与坐标系垂直方向相同, 所选第二点的投影方向与坐标系水平方向相同.UNSPEC: 用户定义第一点的投影方向.* GRID: 建立点网格.LIMITE: 建立有限的点网格.UNLIM : 建立点的无限网格.CREATE:建立点的网格.DELETE:删除一个点的网格.VISUALTN:显示点的网格.NORMAL:建立平行于当前两坐标轴的正交网格点.UNSPEC:建立一般网格点或一般正交网格点.三、步骤:1.生成两相交直线的交点:POINT+PROJ/INT+SINGLE+LIM ON1. 选一直线."WPS MULTI(多)-SELSEL 1ST ELEM"2)选另一直线或用多元素选择多条直线.(如:*LN)"WPS MULTI-SELSEL 2ND ELEM"注:信息区显示:"1 POINT CREATED"2.生成两点的中点:POINT+PROJ/INT+SINGLE+LIM ON1. 选一点."WPS MULTI-SELSEL 1ST ELEM"2)选第二点."WPS MULTI-SELSEL 2ND ELEM"3.用坐标生成点:POINT+COORD+SINGLE(选一点,一直线或曲线的末端.)"WPS MULTI-SEL键入要生成点相对坐标系原点沿X,Y和Z的坐标.SEL PT<LN/CRV>//KEY X,Y,Z"或键入沿X,Y,和Z轴的增量."KEY DX,DY,DZ//YES:STD"4.生成等距点:POINT+SPACES+PTS1)选一条曲线."SEL ELEMMEDIAN(中央的):YES:ONE PTKEY NUM//ORIGIN:(起始)2)在曲线上选一点为原点.SEL PT<LN/CRV>"3)键入相对原点的距离,并"KEY DIST(,NUM)需要时键入所需的点数.4)如需要时按YES键使生成顺序反向."YES:INV"5.生成曲线的切点:POINT+TANGENT1)选一条曲线,或用多元素选择若干条曲线."CUR MULTI-SELSEL PLANAR CURVE2)选一条直线,或用多元素选择若干条直线."CUR MULTI-SELSEL LN"第三章 线(LINE)功能一、图解:LINE(2D)LINE(3D)二、定义:* PT/PT: 连接两点生成一条直线.SEGMENT(线段):一直线段.UNLIM: 一无限长直线.STANDARD(标准):通过任意两点.HORIZONT:通过第一点的水平线.VERTICAL:通过第一点的垂直线.HOR-VERT:通过两点的水平线和垂直线.VERT-HOR:通过两点的垂直线和水直线.* PARALLEL(平行):生成一条直线与另一条直线平行.* HORIZONT:生成一条直线与坐标系第一轴平行.* VERTICAL:生成一条直线与坐标系第二轴平行.AUTO LIM:长度由所选元素自动定义.ONE LIM: 定义与原始点相对的另一端边界.TWO LIM: 定义相对于原始点的两端边界.SYM LIM: 定义相对于原始点对称的两端边界.* NORMAL: 生成一条通过一点并与另一条直线(3D中FAC,SUR等)垂直的直线. * MEDIAN: 生成两点或一直线的中线.* BISECT: 生成两会聚直线的对角线.* COMPON(矢量): 通过一点生成一直线,保持与给定矢量方向一致.* ANGLE(角度): 生成角度线.* TANGENT: 通过一点生成一切线.* MEAN(平均值): 通过一系列点,并取其平均值生成一直线.* MODIFY(修改): 修改一直线.REPLACE: 修改原始直线.DUPLICAT:修改该直线的复制直线.SAME: 保持相同图形特性,并位于同一层.STANDARD:取图形标准并位于当前层.* GRID: 生成网格线.* INTERSEC:(3D)生成两平面的交线.* PROJECT: (3D)将一直线向一平面投影.* EDGE(端点): (3D)通过一点生成一直线并与屏幕平面平垂直.三、步骤:1.连接两点生成一直线:LINE+PT-PT+SEGMENT(段)1)选一点. "SEL 1ST PT<LN/CRV>"2)选第二点. "SEL 2ND PT<LN/CRV>""YES:END CHAIN(链式)""SEL NEXT PT<LN/CRV>"2.生成与另一条直线平行的直线:LINE(3D)+PARALLEL(平行的)+SEGMENT+ONE LIM1)选一直线定义生成直线的方向. "DIRECTION(方向):SEL LN"2)选择生成直线的原点. "ORIGIN(原始):SEL PT<LN/CRV>"3)需要时,选矢量改变直线的方向 "LIMIT:(界限):SEL PT/LN/PLN/SUR或键入直线的长度. SEL ARW//KEY LNG//YES:STD"3.生成与另一条直线平行的直线:LINT(2D)+PARALLEL+SEGMENT+ONE LIM1)选一条直线定义生成直线的方向."DIRECTION:SEL LN"2)用鼠标第二键指定区域."SEL PT/CRV//IND REGION(区域)"3)键入距离,需要时同时键入数目,"KEY DIST(,NUM)//YES:STD"或按YES键接受控制信息区显示的值.4)需要时选箭头改变方向或键长度."SEL ARW//KEY LNG//YES:STD"4.生成水平或垂直线LINE+HORIZONT(VERTICAL)+SEGMENT+ONE LIM1)选一点或曲线或键距离."SEL PT/CRV//KEY DIST"2)需要时选箭头改变方向或键长度"SEL ARW//KEY LNG//YES:STD"或按YES键确认.5.生成与另一直线垂直的直线LINE(3D)+NORMAL(法线)+SEGMENT+ONE LIM1)选择一生成直线的通过点."SEL PT"2)选择一参考直线."SEL PLN/SUR/FAC"3)按YES键接受生成与参考直线垂直的直线."YES:NORMAL LINE"4)键入一长度值,或按YES键接受显示的值."SEL ARW//KEY LNG//YES:STD"6.生成两平面的交线:LINE(3D)+PROJECT+SEGMENT1)选一直线."SEL LN/PLN"2)选一平面."SEL PLN"3)键入生成直线的长度."LIMIT:SEL PT/与另一直线垂直的直线LINE(3D)+NORMAL(法线)+SEGMENT+ONE LIM 1)选择一生成直线的通过点."SEL PT"2)选择一参考直线."SEL PLN/SUR/FAC"3)按YES键接受生成与参考直线垂直的直线."YES:NORMAL LINE"4)键入一长度值,或按YES键接受显示的值."SEL ARW//KEY LNG//YES:STD"6.生成两平面的交线:LINE(3D)+PROJECT+SEGMENT1)选一直线. "SEL LN/PLN"2)选一平面. "SEL PLN"8.生成曲线的切线:LINT(3D)+TANGENT+SEGMENT+ONE LIM1)选一曲线."SEL CRV"2)曲线上选一点."SEL PT<LN/CRV>"3)键入生成线的长度."LIMIT:SEL PT/LN/PLN/SURSEL ARW//KEY LNG//YES:STD"9.修改直线:旋转和平移LINE(3D)+MODIFY+REPLACE1)选一直线:显示三个符号."SEL LN"2)选符号1或2."SEL PT<LN/CRV>""YES:TRANSLATE(转移)//SYMMETRY(对称):SEL PLN"3)选一点,符号被移到该点."SEL PT<LN/CRV>"注:如果选符号3,该符号被移到所选点上:该直线被移动.第四章 平面(PLANE)功能一、图解:PLANE(3D)二、定义:* THROUGH(通过): 生成一平面,使其通过若干元素.* EQUATION(方程式):生成由方程定义的平面.* PARALLEL:生成一平行平面.* NORMAL: 生成一平面,使其通过一点或一直线,并与给定方向垂直. * ANGLE: 生成一平面,使其通过一直线,并与另一平面成给定角度. * ORIENTN: 修改平面法矢的取向.* MEAM: 通过至少有三组的一组点生成平面.* PRL WINM:通过一点生成一平面,并使其与窗口平行.* EDGES: 生成一平面,使其与给定窗口垂直.PT/LN: 通过两点或一直线的平面.PARALLEL:通过一点并平行一直线的平面.NORMAL: 通过一点并垂直于一直线的平面.ANGLE: 通过点并与一直线成一定角度的平面.* SPACES: 在一元素上生成等距平面或中面.* LIMITS: 生成位于元素(LN/CRV)边界处的平面.三、步骤:1.生成一平面使其通过若干元素:PLANE+THROUGH1)选点或直线或曲线或曲面"SEL PT1/LN1/CRV/FAC"2)选择或指定一点来定义平面符号的中心."SEL/IND PT//YES CURRENT"2.生成由方程定义的平面:PLANE+EQUATION1)键入方程AX+BY+CZ+D=0"AX+BY+CZ+D=0:KEY A,B,C,D或键入X=C,Y=C,Z=CKEY X=/Y=/Z=//KEY XY/XZ/YZ2)选择或指定一点来定义平面符号的中心"SEL/IND PT//YES:CURRENT"或按YES键接自动定位.3.生成平行平面:PLANE+PARALLEL1)选一参考平面."SEL PT//SEL ARW//YES:INVSEL 2ND PLN"2)键入两平间的距离,并需要时键入数目."KEY DIST(,NUM)"3)需要时按YES键反转生成顺序."YES:INV"4.生成由角度定义的平面:PLANE+ANGLE1)选一直线."SEL LN"2)选一参考平面."SEL PLN"3)键入相对参考平面的角度,"KEY DIST(,NUM)并需要时键入生成平面的个数.//YES:STD"4)需要时按YES键反转生成顺序."YES:INV"5.生成等距平面:PLANE+SPACES1)选择支撑直线或曲线."SEL PT/LN/CRV/PLN"2)选一点."SEL PT<LN/CRV>"3)键入两平面的距离,需要时键数目."MEDIAN:YES:ONE PLANEKEY DIST(,NUM)"4)需要时,按YES键反转生成顺序."YES:INV"第五章 删除(ERASE)功能一、图解:二、定义:* ERASE(删除): 从模型中删除元素.* PACK(压缩): 压缩模型.* SHOW(显示): 重新显示元素.* NO SHOW:隐去元素.* PICK: 使元素重新成为可选.* NO PICK:防止元素被选择.W.SPACE:在当前工作空间的元素.CURRENT:在当前集(SET)中的元素.三、步骤:1.删除一个或多个元素:ERASE+ERASE+W.SPACE选择一个或多个元素进行删除."WSP MULTI-SELSEL ELEM"2.压缩模型:ERASE+PACK1)按YES键接受对模型的压缩."YES:PACK"信息"PACK DONE"在控制区被显示.注:PACK的辅助窗口:-INDEX(索引)表包含模型中元素的标识符及其图形特性.-DATA (数据)表包含元素的数据定义.在模型中构造元素要填入这两个表.但当元素被从模型中删除时,所占空间未释放.因此,用户必须经常压缩模型,以便复被删除元素留下的空间.3.从显示中隐去一个或多个元素:ERASE+SHOW1)选一个或多个欲隐去的元素:"WSP MULTI-SEL所选元素不显示,所选元素在NO SHOW中. SEL ELEM//YES:SWAP"4.重新显示隐去元素:ERASE+SHOW1)按YES键,以便显示NO SNOW中的元素."WSP MULTI-SELSEL ELEM//YES:SWAP"2)选一个或多个NO SNOW中的元素:所选不再被显示,被重新放入SHOW中.3)按YES键重新显示模型:转换成SHOW状态.这时NO SHOW项不被显示.第六章 简单元素的几何修改(LIMIT1)功能一、图解:LIMIT1(修剪)功能二、定义:* RELMIT(修改): 修改直线或曲线的边界.TRIM ALL: 所选两元素均被修剪.TEIM SL1: 仅所选第一元素被修剪.CLOSE(关闭): 删除直线或曲线的边界.* CORNER: 导圆弧.* MACHINE: 生成连接弧.CHAMFER(倒角): 倒角.ANGLE: 由一角度和一长度定义.LENGTH(长度): 由两长度定义.TRIM(修剪) ALL: 所选两元素均被修剪.TRIM EL1: 仅所选第一元素被修剪.NO TRIM: 所选元素均不被修剪.MACH JOG:加工凹线.SGL RAD: 由一半径定义.DBL RAD: 由两半径定义.TRIM EL2: 仅第二元素被修剪.NO TRIM: 所选元素不被修剪.SHT JOG: 钣金下陷.仅2D:PARAL LN:沿四条平行直线.CURVES(曲线): 沿四条平行直线或曲线.LNG TGT: * 相对于连接弧在直线上的切点.LNG PT : * 相对于连接弧和直线上的交点. * BREAK: 几何断开一直线或曲线.* CONCATEN:几何连接元素的边界,以便形成单一元素. CURVE: 所得元素为一CRV曲线.COMP CRV:所得元素是一CCV曲线.* EXTRAPOL(extropolation外插):外插一直线或曲线. * APPR(appraximate近似) CCV:将一CCV近似成一CRV.三、步骤:1.同时对两元素修剪:LIMIT1+RELIMIT+TRIM ALL1)选要修改的直线或曲线:"SEL LN/CRV"2)选要修改的另一元素:"SEL ELEM//IND:PT"两元素相对其交点均被修剪.3)需要时,指定一区域,"SEL LN/CRV以便获得另一种可能解.//IND REGION"2.用另一元素修剪某一元素:LIMIT1+RELIMIT+TRIM EL11)选要修改的直线或曲线:"WSP MULTI-SEL SEL LN/CRV"2)选另一元素:"SEL ELEM"3)需要时,指定要保留的区域:"IND REGION"3.在两元素间生成连接弧:LIMTIT1(3D)+CORNER+TRIM ALL1)选要改的一直线或曲线:"SEL 1ST LN/CRV"2)键入半径值:"KEY RAD"3)选另一直线或曲线:"SEL 2ND LN/CRV"4)按YES键接受程序计算的"PROJECTION(投影)PLANE:SEL PLN "隐含平面".YES:IMPLICIT(隐含的) PLANE"5)需要时,按YES键显示另一个"SEL 1ST LN/CRV何解:凸曲线,直曲线或凹曲线.IND REGION//YES:CONVEX(凸面的)"4.生成两相交直线的倒角:LIMIT1+MACHINE+CHAMFER+ANGLE+TRIM ALL1)选一直线:"SEL LN1"2)选另一直线:"SEL LN2"3)键入长度或一角度值或"KEY LNG(,ANG)按YES键接受控制信息显示的值.//YES:STD"5.元素的几何分割:LIMIT1+BREAK1)选要修改的元素:"WSP MULTI-SELSEL LN/CRV/CCV/CST"2)按YES键,在选元素所在点"YES:SELECTED PT处断开该元素,或选另一元素:SEL ELEM//IND PT"第一元素在与第二元素的交点处被断开,或指定一点:第一元素在指定点在其上的投影点处被断开.6.将若干元素几何连接成单一元素LIMIT1+CONCATEN+CURVE1)选一元素:"SEL LN/CRV/CST"2)选另一元素:"SEL LN/CRV或按YES键自动连接若干元素.//YES:AUTO"注:如果用CURVE项连接元素,所得是一多弧曲线,初始元素的标准定义被丢失.如果用COMP CRV项连接元素,所得是一多弧曲线,初始元素的标准定义被保留.当一CCV被断开时,可恢复到初始元素,如一直线和曲线.用APPRCCV项可将一条CCV近似成一条CRV曲线.7.外插直线或曲线:LIMIT1+EXTRAPOL1)选一元素:"SEL LN/CRV"2)选外插端所对应的号:"SEL/KEY NUM"3)如所选为直线,键入长度值,"KEY LENGTH或如所选为曲线,键入百分比://YES:STD"4)按YES键迭代外插:"YES:ITER"注:如果键入负值,元素被缩短.如果键入正值,元素被延长.第七章 生成简单曲线(CURVE2)功能一、图解:CURVE2(2D)CURVE2(3D)二、定义:1.CURVE2 (2D)定义:* CIRCLE(圆): 生成圆弧或圆.RADIUS(半径): 由半径定义.DIAMETER(直径): 由直径定义.THREE PT: 由三通过点定义.PART ARC:一圆弧或一补弧.TANGENT(相切): 一圆弧相切于.UNSPEC:1或2元素+一半径,或3元素.CENTER(圆心):由一圆心和一元素定义.MODIFY: 修改圆的几何元素.REPLACE: 修改初始圆.DUPLICAT:修改复制圆.STANDRARD: 采用图形标准并位于当前层.SAME: 保持相同图形特性并位于同一层.* ELLIPSE(椭圆): 生成椭圆或椭圆弧.CENTER: 由中心定义的椭圆.AXIS: 由一轴定义的椭圆.COMPLETE(完整): 一完整的椭圆.PARTIAL: 一椭圆或其补弧.* CONIC(圆锥): 生成圆锥曲线弧(椭圆,抛物线或双曲线)3PTS: 由3个条件定义.5PTS: 由5个条件定义.* PTS CST:* PARALLEL: 生成与平面曲线平行的一条或多条曲线. STANDARD: 由标准距离定义.OFFSET: 由线性变化定义.* CONNECT(连接): 生成两平面曲线间的连接曲线.* TGT CONT:* CVT CONT:2.CURVE2 (3D)定义:* PARALLEL: 生成与平面曲线或位于曲面上的非平面曲线平行的一条或多条曲线. * DEPTH: 通过拉伸轮廓线和应用一变换来生成线架图.TRANSLAT: 平移.ROTATE: 旋转.GENERAL: 预先用TRANSFOR(2D或3D)功能生成并存储的变换.* CIRCLE: 定义一圆,该圆通过一点,所在平面与给定方向垂直.CREATE: 生成一圆.MODIFY: 修改一圆.(下列定义与2D相同)* HELIX: 生成螺旋线.第八章 生成平面表面和封闭成体(LIMIT2)功能一、图解:LIMIT2(2D)LIMIT2(3D)二、定义:LIMIT2(2D)* CREATE: 生成平面表面.* BREAK: 打断平面表面.STANDARD:采用图形标准并位于当前层.SAME: 保持相同图形特性并位于同一层.* UNION: 连接平面表面.* INTERSEC:(横断,交线)* SUBTRACT:(减去,扣除)* DIVIDE: (分开)LIMIT2(3D)* FACE(表面):定义表面轮廓.CREATE: 生成平面.PLANE: 通过选共面元素.SURFACE: 通过选一曲面或若干LN和CRV型元素.BREAK: 断开表面.STANDARD:采用图形标准并位于当前层.SAME: 保持与初始元素相同的图形特性并与初始元素位于同一层.UNION(合并): 所得表面是初始表面的并.INTERSEC:所得表面是初始表面的交.SUBTRACT:所得表面是一表面减去另一表面.DIVIDE: 所得三表面对应于初始表面的相交部分和其剩余部分.TRIM ALL:初始表面被去掉.TRIM EL1:所选第一表面被去掉.* SURFACE(曲面): 定义曲面轮廓.BREAK: 断开一曲面.CONCATEN:将两曲面连接成一个曲面.EXTRA POL:外插一曲面.* VOLUME(体积): 定义封闭实体.* SKIN(蒙皮): 生成蒙皮面.CREATE:生成蒙皮面.MODIFY:修改蒙皮面.OFFSET(平移):平移蒙皮面.第九章 标准(STANDARD)功能一、图解:STANDARD二、定义:* SPC ELEM: 定义模型中空间元素的图形特性.* DRW ELEM: 定义DRAW元素的图形特性.* COLOR: 对按类别分配给元素的彩色和彩色表进行管理. MODIFY: 给元素分配彩色.SET: 属于特定集的元素.LAYER(层): 属于特定层的元素.TYPE: 特定类型的元素.VIEM: 特定视图的元素.DISPLAY:显示.LIST: 列表.TABLE(表格): 管理预先用COL局部功能定义的模型调色板.SAVE: 存储模型中的调色板.RESTORE:调用预先存储在模型中的调色板.* MODEL: 定义模型的几何特性.注: THICKNESS(厚度):可定义线宽.UNIT(单位):可定义模型的单位.INERTIA:(SURFACE MASS)定义曲面质量的标准值.(VOLUME MASS)定义体质量的标准值.IDENTICAL CURVES:相同曲线容差.INTERSECTION PROJECTION:交--投影容差.INFINITY:无限长线值.STEP:步长容差.MODEL DIMENSION:模型尺寸.COLOR:定义颜色.PL/LN/CRV/SFACE/FACE:定义类型.第十章 分析(ANALYSIS)功能一、图解:ANALYSIS(3D)二、定义:* NUMERIC(数值): 数值分析.COMPUTE(计算):计算和显示分析值及临时元素.RELATIVE(相对的):相对当前坐标.ABSOLUTE(绝对的):相对绝对坐标.CREATE: 在模型中生成分析过程中显示的临时元素.* RELATIVE:两元素相对分析.SINGLE: 一次分析.REPEAT: 一元素相对于其它若干元素的重复分析.* LOGICAL(合逻辑的): 定义元素的逻辑特性.STANDARD:与所选元素直接相连的元素.PARENTS(双亲): 定义所选元素所必须的元素即双亲.CHILDREN(孩子):由所择元素的定义来生成的元素即孩子.FAMILY(家庭): 属于同一族的元素.* INERTIA(仅3D):分析FAC或VOL型元素的惯量特性.COMPUTE: 显示元素的分析结果.COMBINE: 显示用前面INERTIA+COMPUTE项分析的同一类型若干元素的分析结果. CREATE: 在模型中生成分析过程中显示的临时元素.第十一章 模型显示一、局部功能:1.按F4键局部功能窗口将被显示.窗口如下:2.定义:1)标准局部功能(STD)VIRTUAL:控制模型显示.ON--考型虑整个屏幕.OFF-仅考虑在屏幕上显示的元素.ALPHA WIND:控制分析时字符数字窗口是否被显示.MEUN:是否显示图形屏幕的不同区.FLAT WINDOW:是否处理包含在屏幕平面之内的显示.当应用了大的缩放因子之后激活BR时,它避免不进行显示.RUBBER BAND:是否显示附于图形光标的皮筋线段临时符号.THICKNESS:在MODEL Ⅱ屏幕上是否显示线宽.BACKGROUND:用户是否能够在一个彩色浓淡画面的背景平面上工作.EXIT:局部功能窗口不再显示.2)2D局部功能:ONE WINDOW:每次激活一个窗口的2D局部变换.ALL WINDOW:同时激活所有窗口的2D局部变换.KEEP ON: 选退出项之后保持2D局部变换起作用.KEEP OFF:退出局部功能时保持2D局部变换不起作用.EXIT:退出局部窗口功能.RESET:将模型按其初始位置重新显示.ZM:分别通过选+或-符号放大或缩小模型显示.3)3D局部功能:UNSPEC ROT:允许模型绕一直线或一曲线所选点处切线进行任意旋转.VIEW PLANE:允许模型按所选两矢量定义的平面进行显示.VIEW DIREC:允许按所选轴进行模型显示.BOX:使用户能够将显示限制在平行于屏幕并通过所选元素中点的两平面之内:只有在这两平面之间的元素被显示. KEEP ON:在退出局部功能之后保持3D局部变换起作用.KEEP OFF:在退出局部功能之后3D局部变换不再起作用.EXIT:退出局部功能.RESET:将模型重新显示成初始位置: 自最后一次激活BR并在任何处之前. ANIMAT:在前四项下可用该任选项.对模型进行顺进针或逆时针的连续旋转.。