项目二 直流调速装置电路
- 格式:ppt
- 大小:3.58 MB
- 文档页数:60
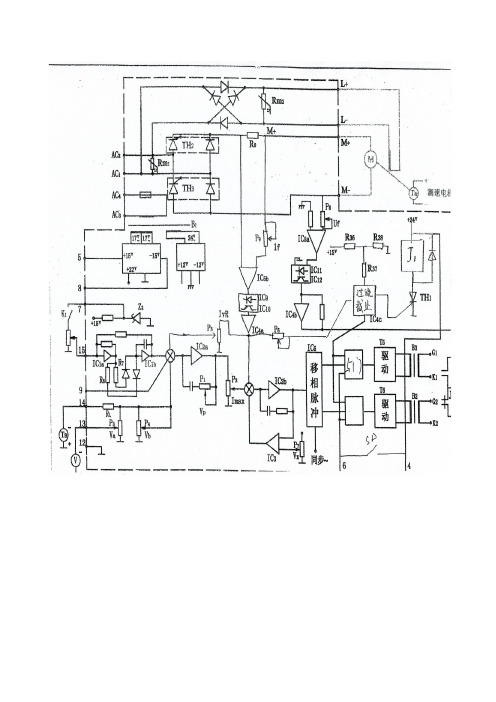
直流电机调速原理及框图说明(仅供参考)S-100直流电机调速器电路主要有主回路和控制回路两部分。
1、主回路由交流AC220V供电,插接端子AC1、AC2输入,经开关、压敏电阻RM1,可控硅整流器(SCR)TH12、TH3模块,电枢回路的取样电阻R0,外接直流电机电枢M+、M-组成。
励磁线圈回路由单相桥整流堆D32~D35,压敏电阻RM2,接入励磁L+、L-组成。
2、控制回路叙述如下:接通电源,合上选通开关SD(CN4~6点接通)T4晶体管导通,绿色发光二极管LD发亮,给定积分器、电压、电流调节器的电子开关打开,移相触发器IC6解除封锁,调速器进入工作状态。
分析几个主要环节回路:(1)给定积分输入的测速反馈输入回路:给定积分输入由IC1a、IC1b、R6、R7组成;R6用于降速时间调整,R7用于升速时间调整。
测速反馈输入由连接于测速电机端子14、电位计P3、测速表衰减电阻R11组成;电位计P3将测速电机的速度变化转换为电压变化信号,它与给定积分信号电压GT叠加于IC2a的反相输入端[即框图中的闭1→⊕处]相比较之后得出误差(△U)SJ再经IC2a进行比例放大后,IC2a输出速度调节电压SJ。
(2)电流调节回路:由取样电阻R0、IC5b、IC9、IC10、IC2b组成,R0上的电流反馈信号经IC5b放大,通过IC9、IC10。
光电耦合隔离分两路:一路送入IC2b电流调节器反相输入;另一路经P5输出一个补偿电压送到IC2a反相输入端,对速度进行补偿。
(3)触发角α控制回路:由IC3a、IC3b组成触发角α限制回路,把TH2、TH3可控硅导通角α控制在一个可靠的范围内,由IC2a输出的ST(无差调速)值,IC3a和IC3b输出的触发角限制电压Uα,电流调节回路送入的电流反馈电压三者输入到IC2b的反相输入端[即框图中的闭环2→⊕处]相比较,得出误差值经IC2b进行比例、积分放大后,输出移相调整电压△U,送入IC6[图中长块形模块集成电路块(脉冲移相器)],就能调节IC6的输出移相脉冲,经IC7、IC8驱动T5、T6三极管的导通和截止,经同步脉冲变压器B2、B3输出输出发脉冲控制TH2、TH3可控硅的α导通角,使SCR输出可控直流电压给电枢,调节直流电机速度。

直流调速器接线图(图⽂详解)直流调速器就是调节直流电动机速度的设备,直流调速器由于直流电动机具有低转速⼤⼒矩的特点,是交流电动机⽆法取代的,因此调节直流电动机速度的设备——直流调速器具有⼴阔的应⽤天地。
直流调速器接线图1、不隔离型(仅指BL产品)a、外部电位器连接⽅式:使⽤⼀个2W/10K 电位器控制驱动器调速,按照下图进⾏接线。
安装⽅法:电位器的连接说明(BL产品):注意1、驱动器所提供的5V输出电压,因电流较⼩(5mA),所以不能外接其它负载(如:数显表、指⽰灯等),否则造成驱动器的损坏。
2、为了减少不必要的电⼦信号⼲扰,应尽量缩短速度调节电位器的连线长度,当连线超过0.5m时,必须使⽤屏蔽线,屏蔽⽹单端接地。
b、外置VID连接⽅式:0-5V,0-10V,4-20mA 控制信号经过专⽤隔离器转换后连接到VID接⼝,每种控制应⽤只能使⽤⼀种控制信号进⾏控制。
订货时需要说明控制⽅式。
外置VID隔离器(另配)的连接使⽤请参考下图所⽰:注意外置VID接⼝线若过长,请务必使⽤屏蔽线,屏蔽⽹单端接地。
2、隔离型:(仅指AL产品)对于AL隔离型产品,使⽤0-5V,0-10V或4-20mA的外部标准信号控制连接⽅式见下图所⽰。
每种控制应⽤只能使⽤⼀种控制信号进⾏控制。
订货时需要说明控制⽅式。
注意1、标准信号输⼊务必使⽤屏蔽线,屏蔽⽹单端接地。
2、以上控制⽅式的连接,只能选⽤⼀种⽅式连接,不能同时连接⼏种⽅式。
3、所有控制信号的连线务必使⽤屏蔽线,屏蔽⽹单端接地。
使能控制:INHIBIT使能控制连接:该控制⽅式可通过⼀个“使能线路”来进⾏控制器输出的停⽌和开启控制如下图所⽰:也可以使⽤⼀个集电极开路(NPN)来代替开关进⾏控制。
当“使能控制端”两端闭合时,控制器内部电路会迅速(取ACCEL设定值)提升马达转速,直到MAX SPD 设定值上。
当“使能控制端”两端断开时,控制器内部电路会快速降低马达转速,直到马达停⽌运转。

1 绪论1.1 直流调速的优点直流调速系统,特别是双闭环直流调速系统是工业生产过程中应用最广的电气传动装置之一。
它通常采用三相全控桥式整流电路对电动机进行供电,从而控制电动机的转速,传统的控制系统采用模拟元件,如晶体管、各种线性运算电路等,虽在一定程度上满足了生产要求,但是因为元件容易老化和在使用中易受外界干扰影响,并且线路复杂、通用性差,控制效果受到器件性能、温度等因素的影响,从而致使系统的运行特性也随之变化,故系统运行的可靠性及准确性得不到保证,甚至出现事故。
双闭环直流调速系统是一个复杂的自动控制系统,在设计和调试的过程中有大量的参数需要计算和调整,运用传统的设计方法工作量大,系统调试困难,将SIMULINK 用于电机系统的仿真研究近几年逐渐成为人们研究的热点。
同时,MATLAB软件中还提供了新的控制系统模型输入与仿真工具SIMULINK,它具有构造模型简单、动态修改参数实现系统控制容易、界面友好、功能强大等优点,成为动态建模与仿真方面应用最广泛的软件包之一。
它可以利用鼠标器在模型窗口上“画”出所需的控制系统模型,然后利用SIMULINK提供的功能来对系统进行仿真或分析,从而使得一个复杂系统的输入变得相当容易且直观。
1.2 本人的主要工作本文采用工程设计方法对转速、电流双闭环直流调速系统进行辅助设计,选择适当的调节器结构,进行参数计算和近似校验,并建立起制动、抗电网电压扰动和抗负载扰动的MATLAB/SIMULINK仿真模型,分析转速和仿真波形,并进行调试,使双闭环直流调速系统趋于完善、合理。
2 方案选择及系统工作原理2.1 电动机参数及设计要求1、输入三相交流电压:380 V2、电机额定功率和转速:自定3、要求电动机转速在(30%~100%)n N 范围内可调。
设参数如下:直流电机额定电压220V N U =,额定电枢电流136A N I =,额定转速1460rpm N n =,电枢回路总电阻0.5Ωa R =,电感0.012H a L =,励磁电阻240f R =Ω,励磁电感120H f L =,互感 1.8H af L =,0.132Vmin r e C =,允许过载倍数 1.5λ=。
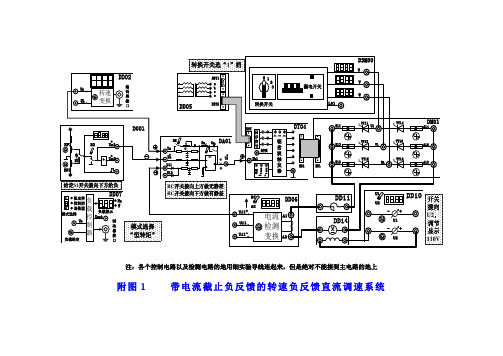
注:各个控制电路以及检测电路的地用细实验导线连起来,但是绝对不能接到主电路的地上附图1带电流截止负反馈的转速负反馈直流调速系统
注:各个控制电路以及检测电路的地用细实验导线连起来,但是绝对不能接到主电路的地上附图2转速、电流双闭环直流调速系统
注:各个控制电路挂箱以及监测电路的地用细实验导线连起来,但不能与主电路地相连。
附图3恒压频比控制下异步电动机机械特性的研究
注:各个控制电路挂箱以及监测电路的地用细实验导线连起来,但不能与主电路地相连。
附图4 绕线转子异步电动机串级调速系统。
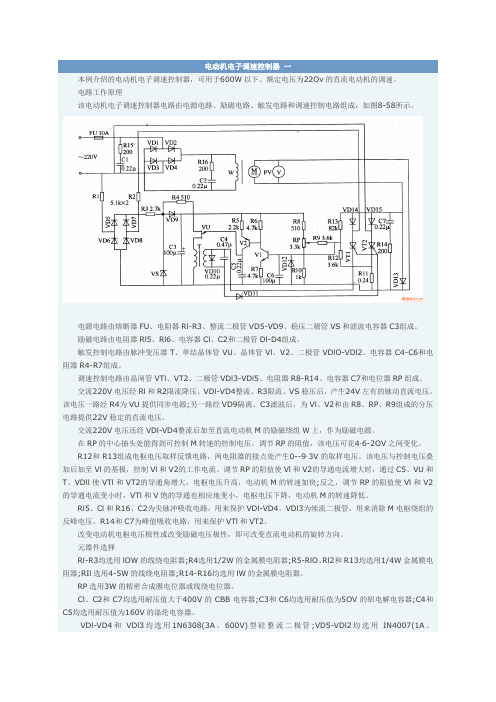
电动机电子调速控制器一本例介绍的电动机电子调速控制器,可用于600W以下、额定电压为22Ov的直流电动机的调速。
电路工作原理该电动机电子调速控制器电路由电源电路、励磁电路、触发电路和调速控制电路组成,如图8-58所示。
电源电路由熔断器FU、电阻器Rl-R3、整流二极管VD5-VD9、稳压二极管VS和滤波电容器C3组成。
励磁电路由电阻器Rl5、Rl6、电容器Cl、C2和二极管Dl-D4组成。
触发控制电路由脉冲变压器T、单结晶体管VU、晶体管Vl、V2、二极管VDlO-VDl2、电容器C4-C6和电阻器R4-R7组成。
调速控制电路由晶闸管VTl、VT2、二极管VDl3-VDl5、电阻器R8-R14、电容器C7和电位器RP组成。
交流220V电压经Rl和R2限流降压、VDl-VD4整流、R3限流、VS稳压后,产生24V左有的脉动直流电压。
该电压一路经R4为VU提供同步电源;另一路经VD9隔离、C3滤波后,为Vl、V2和由R8、RP、R9组成的分压电路提供22V稳定的直流电压。
交流220V电压还经VDl-VD4整流后加至直流电动机M的励磁绕组W上,作为励磁电源。
在RP的中心抽头处能得到可控制M转速的控制电压。
调节RP的阻值,该电压可花4·6-2OV之间变化。
R12和R13组成电枢电压取样反馈电路,两电阻器的接点处产生0--9·3V的取样电压。
该电压与控制电压叠加后加至Vl的基极,控制Vl和V2的工作电流。
调节RP的阻值使Vl和V2的导通电流增大时,通过C5、VU和T、VDll使VTl和VT2的导通角增大,电枢电压升高,电动机M的转速加快;反之,调节RP的阻值使Vl和V2的导通电流变小时,VTl和V饱的导通也相应地变小,电枢电压下降,电动机M的转速降低。
Rl5、Cl和R16、C2为尖脉冲吸收电路,用来保护VDl-VD4。
VDl3为续流二极管,用来消除M电枢绕组的反峰电压。
R14和C7为峰值吸收电路,用来保护VTl和VT2。

直流电机调速器电路图555电力电子技术是一门新兴的应用于电力领域的电子技术,就是使用电力电子器件(如晶闸管,GTO,IGBT等)对电能进行变换和控制的技术。
也是一门综合了电子技术,控制技术和电力技术的新兴交叉学科。
直流电机是电机的主要类型之一。
直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。
它是能实现直流电能和机械能互相转换的电机,用作直流发电机可以得到直流电源,而作为直流电动机,由于其优越的调速性能,在许多调速性能要求较高的场合,得到广泛使用。
直流电动机与交流电动机相比,具有结构复杂,维护困难,价格比较贵等缺点,应用不如交流电动机广泛。
但由于直流电动机有优良的启动,调速和制动性能,因此在工业领域中仍占有一席之地。
直流电机无级调速电路这块电路板电路简单,成本不高,制作容易,电路作简单分析:220V交流电经变压器T降压,P2整流,V5稳压得到9V直流电压,为四运放集成芯片LM324提供工作电源。
P1整流输出是提供直流电机励磁电源。
P4整流由可控硅控制得到0-200V的直流,接电机电枢,实现电机无级调速。
R1,C2是阻容元件,保护V1可控硅。
R3是串在电枢电路中作电流取样,当电机过载时,R3上电压增大,经D1整流,C3稳压,W1调节后进入LM324的12脚,与13脚比较从14脚输出到1脚,触发V7可控硅,D4 LED红色发光管亮,6脚电压拉高使V1可控硅不能触发,保护电机。
电机过载电流大小由W1调节。
市电过零检测,移相控制是由R5、R6降压,P3整流,经4N35隔离得到一个脉动直流进入14脚,从8脚到5脚输出是脉冲波,调节W2电位器即调节6脚的电压大小,可以改变脉冲的宽度,脉冲的中心与交流电过零时刻重合,使得双向可控硅很好地过零导通,D4是过载指示,D3是工作指示,W2是电机速度无级调节电位器。
电路制作好后只要元件合格,不用调整就可使用。
NE555做一个直流电机调速器把电机串联在集电极不要放在发射级在并联个反向的续流二极管防止击穿调整管12V直流电机高转矩电子调速器直流电机在一些应用中需要随时具有高转矩输出能力,无论它是处于低速还是高速运转。
直流电机调速电路原理详解
今天我们来看一下直流电机的调速电路,原理非常的简单,通过串联不同的电阻实现不同的转速。
电路分为三部分
电路分为三部分,因为是直流电机所以要有整流电路,外加主电路和控制电路,主电路的电源是交流220伏的,控制线路的接入电源是380伏。
最主要的三个电气原件,一个KM1和2个中间继电器。
三部分电路
电源是交流220伏,经过变压器变为交流127伏,再经过整流电路变为直流110伏。
三个按钮开关控制三个速度,当按下SB2的时候,接触器KM1自锁,这时候等于电机串了R1R2两个电阻,是最低速状态。
最低速的电流走向
如果想增加速度,可以按下按钮开关SB3,这时候继电器KA1会自锁。
同时它的常开点会闭合,电流跳过R2直接连接电机,实现了加速。
中速的电流走向
需要最快速就按下按钮开关SB4,这时候KA2自锁,同时它的常闭点断开使KA1断电,常开点闭合直接跳过R1电阻。
高速的电流走向
完全的实物接线
接触器的符号是KM,中间继电器的符号是KA,其实图中的KA1和KA2是2个中间继电器,当然也可以用接触器代替,必须和KM1的线圈电压保持一致。
怎么排查故障
KM1和KA1和KA2都有自锁的状态,如果实际应用中哪个元件不工作,就单独检查对应的自锁电路。
双闭环直流调速系统电路原理1.电机模型:首先,我们需要了解电机的基本模型。
直流电机模型可以简化为一个电阻R、电感L和电动势E组成的串联电路,电机的转矩与电流之间的关系为T=Kt*I,其中Kt是电机的转矩常数。
2.外环速度控制环:外环速度控制环主要通过控制电机的转速来实现对电机的调速。
该控制环用于调节内环电流控制环的输入信号。
- 速度指令输入:通过外部输入设定一个期望的电机转速指令N*rpm_ref。
- 速度反馈:通过速度反馈元件,如光电编码器或霍尔元件,测量电机的实际转速 N*rpm_act。
- 速度误差计算:通过将速度指令输入与速度反馈进行比较,可以得到速度误差 e = N*rpm_ref - N*rpm_act。
-速度误差放大器和校正:将速度误差经过一个放大器,得到一个经校正的速度误差信号。
3.内环电流控制环:内环电流控制环通过控制电机的电流来实现对电机的调速。
该控制环用于调节电机的转矩,从而达到所需的转速。
- 电流指令输入:通过外部输入设定一个期望的电机电流指令 I_ref。
- 电流反馈:通过电流反馈元件,如电流传感器,测量电机的实际电流 I_act。
- 电流误差计算:通过将电流指令输入与电流反馈进行比较,可以得到电流误差 e = I_ref - I_act。
- 电流控制器:将电流误差经过一个控制器,得到一个控制信号U_ctrl。
- 电流增益校正:将控制信号经过一个增益校正器,得到一个经校正的控制信号 U_ref。
- 电流放大器:将经校正的控制信号 U_ref 通过一个放大器,得到一个电压信号 U。
-可逆电机驱动器:将电压信号U转换为电机的供电电压。
4.输入信号整合:将输出信号反馈到输入信号中,实现闭环控制。
将经过电压信号 U调制的电流指令输入与速度误差信号 e 相加,得到总的控制信号 U_sum。
将 U_sum 输入给控制器,通过闭环控制来调整电机转速和电流。
最终,通过外环速度控制环和内环电流控制环的协调作用,实现了对电机的精确控制。
调速回路原理图
调速回路的基本原理可以通过下图表示:
[调速回路原理图]
说明:
1. 发电机为主动力源,通过与调速器相连的机械部件,输出带动被控对象(如电机、涡轮等)。
2. 传感器用于感知被控对象的运行状态,通常通过测量输出信号的变化来反映实际运行速度。
3. 控制器接收传感器的反馈信号,与设定值进行比较,并输出误差信号。
4. 误差信号进一步经过滤波器进行处理,以去除噪声干扰,得到平滑的控制信号。
5. 控制信号经过放大器放大后,作为输入信号传送给执行器,由执行器对被控对象进行调节控制。
6. 被控对象在接收到执行器的控制信号后,相应地调整自身的运行状态。
7. 调速器根据被控对象的反馈信号与设定值之间的差异,不断调整输出信号,使得被控对象的实际运行速度逐渐接近设定值。
8. 循环中的负反馈机制使得调速回路能够实现稳定的自动调节,确保被控对象始终保持在设定值附近。
根据以上原理图,调速回路能够实现对被控对象速度的精确控制和稳定调节。