图像的二值化
- 格式:doc
- 大小:27.50 KB
- 文档页数:1
图像二值化的原理
图像二值化是将彩色或灰度图像转换为只包含两种颜色(通常是黑色和白色)的二值图像的过程。
其原理是通过设定一个阈值,将图像中的像素点的灰度值与阈值进行比较,大于阈值的像素点设置为白色,小于阈值的像素点设置为黑色。
具体的步骤如下:
1. 选择一个合适的阈值。
阈值通常由用户根据具体情况来确定,可以是固定值,也可以是根据图像的灰度直方图或统计分析得出的动态阈值。
2. 遍历图像的每个像素点,将其灰度值与阈值进行比较。
3. 如果像素点的灰度值大于阈值,则将其设置为白色(通常用最大强度值表示,如255)。
4. 如果像素点的灰度值小于等于阈值,则将其设置为黑色(通常用最小强度值表示,如0)。
5. 继续遍历所有像素点,直到处理完所有像素点。
通过二值化,可以突出图像中的目标区域,并且减少图像中的细节和噪声,从而便于进行后续的图像处理和分析。
图片的黑白处理(二值化)原始圖片黑白處理后圖片原始圖片:黑白處理后圖片:部分处理代码: code……Dim ts2 As IThresholder = New GlobalMeanThreshold(inbmp)Dim tsBMP As New Bitmap(PictureBox1.Width, PictureBox1.Height)ts2.RenderToBitmap(tsBMP)PictureBox6.Image = tsBMPPictureBox6.Height = PictureBox1.HeightPictureBox6.Width = PictureBox1.WidthPictureBox6.Left = 0PictureBox6.Top = 0……理论知识:灰度图像的二值化处理就是讲图像上的点的灰度置为0或255,也就是讲整个图像呈现出明显的黑白效果。
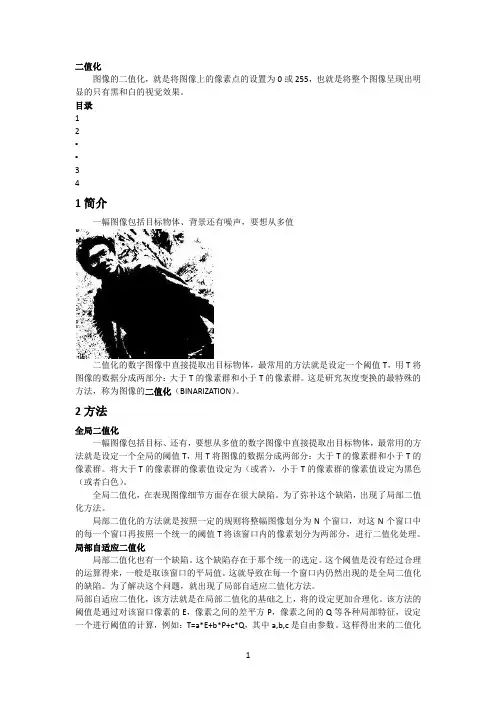
即将256个亮度等级的灰度图像通过适当的阀值选取而获得仍然可以反映图像整体和局部特征的二值化图像。
在数字图像处理中,二值图像占有非常重要的地位,特别是在实用的图像处理中,以二值图像处理实现而构成的系统是很多的,要进行二值图像的处理与分析,首先要把灰度图像二值化,得到二值化图像,这样子有利于再对图像做进一步处理时,图像的集合性质只与像素值为0或255的点的位置有关,不再涉及像素的多级值,使处理变得简单,而且数据的处理和压缩量小。
为了得到理想的二值图像,一般采用封闭、连通的边界定义不交叠的区域。
所有灰度大于或等于阀值的像素被判定为属于特定物体,其灰度值为255表示,否则这些像素点被排除在物体区域以外,灰度值为0,表示背景或者例外的物体区域。
如果某特定物体在内部有均匀一致的灰度值,并且其处在一个具有其他等级灰度值的均匀背景下,使用阀值法就可以得到比较的分割效果。
如果物体同背景的差别表现不在灰度值上(比如纹理不同),可以将这个差别特征转换为灰度的差别,然后利用阀值选取技术来分割该图像。
imagej二值化处理
ImageJ二值化处理
ImageJ是一款非常强大的数字图像处理软件,可以用来对数字图像进行各种操作,包括图像缩放、旋转等。
ImageJ也可以用来对数字图像进行二值化处理,使图像中的像素只有黑白两种状态,只能实现黑白的效果,不能实现彩色效果。
本文将介绍如何使用ImageJ进行二值化处理,以达到黑白效果,以及一些技巧和注意事项。
一、简介
tImageJ是一款强大的图像处理软件,可以用来进行图像分析、图像校正、灰度变换等操作。
它也可以用来进行二值化处理,使图像中的像素只有黑白两种状态,只能实现黑白的效果,不能实现彩色效果。
二、步骤
1. 打开ImageJ,从“文件”中打开待处理的图像。
2. 从弹出的窗口中选择“灰度和二值化”,点“确定”;
3. 在弹出的窗口中,输入阈值,点“确定”;
4. 程序会根据输入的阈值,对图像进行二值化处理,使图像中的像素只有黑白两种状态,只能实现黑白的效果,不能实现彩色效果;
5. 处理完成后,可以从“文件”菜单中保存图像,保存的图像只显示两种颜色:黑色和白色。
三、技巧和注意事项
1. 阈值的设定是影响二值化处理效果的重要因素,一般来说,可以在0~255之间任意设定阈值,阈值越大,处理后的图像越“黑”;阈值越小,处理后的图像越“白”。
2. 如果图像太大,可以先将图像缩小,以减少处理时间。
3. 二值化处理后,图像有时会出现“噪声”,噪声部分可以用鼠标涂黑或涂白后,重新保存图像,以消除噪声。
图像处理中的图像二值化算法随着科技的发展,图像处理技术应用越来越广泛。
作为一项基础技术,图像二值化算法在图像处理中扮演着非常关键的角色,它可以将图像分割成黑白两种颜色,也就是将图像中的灰度值转化为0和1,简化了后续的处理流程。
本文将介绍图像二值化算法的基本原理和应用情况。
一、二值化算法的基本原理在图像中,每个像素都有一定的灰度值,在8位灰度图像中,灰度值的范围在0-255之间,其中0是代表黑色,255代表白色。
当我们需要处理一张图片时,如果直接对每一个灰度值进行处理,那么处理的过程就会非常繁琐,因此,我们需要将图像灰度值转化为0和1两种数字进行处理。
常见的二值化算法有全局阈值算法、局部阈值算法、自适应阈值算法、基于梯度算法等。
其中,全局阈值算法是最基本、最简单的一种算法。
它将整张图像分成黑白两个部分,通过将整个图像的像素点的灰度值与一个固定的阈值进行比较,如果像素点的灰度值大于阈值,就将该像素点的灰度值置为1,否则置为0。
使用全局二值化算法的步骤如下:1.将图像读入到内存中;2.将图像转化为灰度图像;3.计算整个图像的平均灰度值,该平均灰度值作为全局阈值;4.将图像中每个像素点的灰度值与该全局阈值进行比较,灰度值大于等于该全局阈值的像素点赋值为255(代表白色),小于该阈值的像素点赋值为0(代表黑色);5.输出处理后的图像。
当然,这种方法的缺点也非常明显,那就是无法适应不同场合下的图像处理需求,处理效果难以保证。
因此,我们需要更为灵活的算法和方法来进行二值化处理。
二、不同类型的二值化算法1.基于直方图的全局阈值法二值化算法中的全局阈值算法通常是将整个图像分成两类像素:一类像素比较暗,另一类像素比较亮。
在直方图中,该分割就是直方图上的两个峰。
我们可以通过直方图分析来确定这个阈值,并将灰度值低于阈值的像素变为黑色,将灰度值高于阈值的像素变为白色。
对于图像I(x,y),它的灰度直方图h(i)可以表示为:h(i) = N(i) / MN (i=0,1,…,L-1)其中N(i)是图像中所有像素灰度值为i的像素数量,MN是总的像素数量,L是灰度级别数量(在8位图像中,L等于256)然后我们需要确定一个阈值T,所有像素点的灰度值小于T的变为黑色,大于等于T的变为白色。
DSP技术及应用课程设计报告课题名称:数字图像处理——二值化学院:电气信息工程学院专业:通信工程班级:姓名:学号:指导教师:董胜成绩:日期:2014.6.9-2014.6.20目录一、设计目的及要求 (2)二、设计所需的软件介绍 (2)三、设计原理 (3)四、程序流程图 (6)五、设计程序 (7)六、处理后的效果展示 (11)七、课程设计心得 (15)八、参考文献 (16)一、设计目的及要求:目的:1、掌握CCStudio3.3的安装和配置;2、掌握数字图像处理的原理、基本算法和各种图像处理技术;3、掌握图像的灰度化、二值化和灰度直方图的原理及编程思路;4、掌握图像滤波(图像锐化、中值滤波、边缘检测、特征识别等)的基本原理及编程方法及编程思路;要求:1、能够根据设计题目要求查阅检索有关的文献资料,结合题目选学有关参考书。
查询相关资料,初步制定设计方案。
2、用CCS软件进行C语言设计相关算法,实现对图像的采集及处理。
3、编写相应的C语言程序实现各种图像处理。
二、设计所需的软件介绍:英文全称:Code Composer Studio 中文译名:代码调试器,代码设计套件。
CCS的全称是Code Composer Studio,它是美国德州仪器公司(Texas Instrument,TI)出品的代码开发和调试套件。
TI公司的产品线中有一大块业务是数字信号处理器(DSP)和微处理器(MCU),CCS便是供用户开发和调试DSP和MCU程序的集成开发软件。
Code Composer Studio v3.3 (CCStudio v3.3) 是用于 TI DSP、微处理器和应用处理器的集成开发环境。
Code Composer Studio 包含一整套用于开发和调试嵌入式应用的工具。
它包含适用于每个 TI 器件系列的编译器、源码编辑器、项目构建环境、调试器、描述器、仿真器以及多种其它功能。
Code Composer Studio IDE 提供了单个用户界面,可帮助您完成应用开发流程的每个步骤。
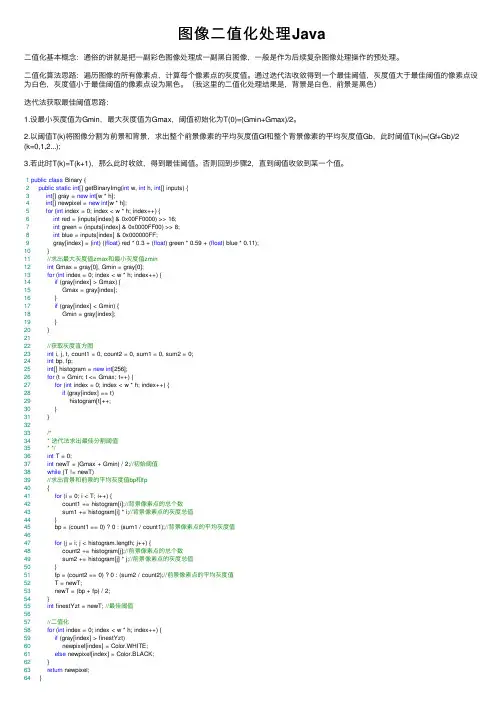
图像⼆值化处理Java⼆值化基本概念:通俗的讲就是把⼀副彩⾊图像处理成⼀副⿊⽩图像,⼀般是作为后续复杂图像处理操作的预处理。
⼆值化算法思路:遍历图像的所有像素点,计算每个像素点的灰度值。
通过迭代法收敛得到⼀个最佳阈值,灰度值⼤于最佳阈值的像素点设为⽩⾊,灰度值⼩于最佳阈值的像素点设为⿊⾊。
(我这⾥的⼆值化处理结果是,背景是⽩⾊,前景是⿊⾊)迭代法获取最佳阈值思路:1.设最⼩灰度值为Gmin,最⼤灰度值为Gmax,阈值初始化为T(0)=(Gmin+Gmax)/2。
2.以阈值T(k)将图像分割为前景和背景,求出整个前景像素的平均灰度值Gf和整个背景像素的平均灰度值Gb,此时阈值T(k)=(Gf+Gb)/2(k=0,1,2...);3.若此时T(k)=T(k+1),那么此时收敛,得到最佳阈值。
否则回到步骤2,直到阈值收敛到某⼀个值。
1public class Binary {2public static int[] getBinaryImg(int w, int h, int[] inputs) {3int[] gray = new int[w * h];4int[] newpixel = new int[w * h];5for (int index = 0; index < w * h; index++) {6int red = (inputs[index] & 0x00FF0000) >> 16;7int green = (inputs[index] & 0x0000FF00) >> 8;8int blue = inputs[index] & 0x000000FF;9 gray[index] = (int) ((float) red * 0.3 + (float) green * 0.59 + (float) blue * 0.11);10 }11//求出最⼤灰度值zmax和最⼩灰度值zmin12int Gmax = gray[0], Gmin = gray[0];13for (int index = 0; index < w * h; index++) {14if (gray[index] > Gmax) {15 Gmax = gray[index];16 }17if (gray[index] < Gmin) {18 Gmin = gray[index];19 }20 }2122//获取灰度直⽅图23int i, j, t, count1 = 0, count2 = 0, sum1 = 0, sum2 = 0;24int bp, fp;25int[] histogram = new int[256];26for (t = Gmin; t <= Gmax; t++) {27for (int index = 0; index < w * h; index++) {28if (gray[index] == t)29 histogram[t]++;30 }31 }3233/*34 * 迭代法求出最佳分割阈值35 * */36int T = 0;37int newT = (Gmax + Gmin) / 2;//初始阈值38while (T != newT)39//求出背景和前景的平均灰度值bp和fp40 {41for (i = 0; i < T; i++) {42 count1 += histogram[i];//背景像素点的总个数43 sum1 += histogram[i] * i;//背景像素点的灰度总值44 }45 bp = (count1 == 0) ? 0 : (sum1 / count1);//背景像素点的平均灰度值4647for (j = i; j < histogram.length; j++) {48 count2 += histogram[j];//前景像素点的总个数49 sum2 += histogram[j] * j;//前景像素点的灰度总值50 }51 fp = (count2 == 0) ? 0 : (sum2 / count2);//前景像素点的平均灰度值52 T = newT;53 newT = (bp + fp) / 2;54 }55int finestYzt = newT; //最佳阈值5657//⼆值化58for (int index = 0; index < w * h; index++) {59if (gray[index] > finestYzt)60 newpixel[index] = Color.WHITE;61else newpixel[index] = Color.BLACK;62 }63return newpixel;64 }65 }。
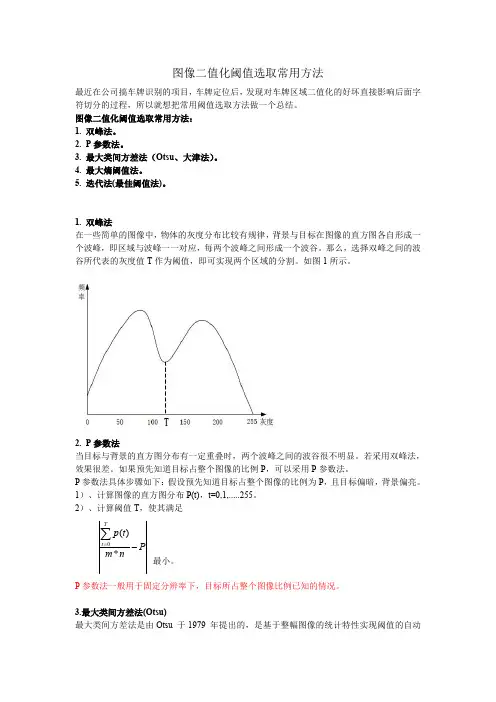
图像二值化阈值选取常用方法最近在公司搞车牌识别的项目,车牌定位后,发现对车牌区域二值化的好坏直接影响后面字符切分的过程,所以就想把常用阈值选取方法做一个总结。
图像二值化阈值选取常用方法:1.双峰法。
2.P 参数法。
3.最大类间方差法(Otsu 、大津法)。
4.最大熵阈值法。
5.迭代法(最佳阈值法)。
1.双峰法在一些简单的图像中,物体的灰度分布比较有规律,背景与目标在图像的直方图各自形成一个波峰,即区域与波峰一一对应,每两个波峰之间形成一个波谷。
那么,选择双峰之间的波谷所代表的灰度值T 作为阈值,即可实现两个区域的分割。
如图1所示。
2.P 参数法当目标与背景的直方图分布有一定重叠时,两个波峰之间的波谷很不明显。
若采用双峰法,效果很差。
如果预先知道目标占整个图像的比例P ,可以采用P 参数法。
P 参数法具体步骤如下:假设预先知道目标占整个图像的比例为P ,且目标偏暗,背景偏亮。
1)、计算图像的直方图分布P(t),t=0,1,.....255。
2)、计算阈值T ,使其满足0()*Tt p t Pm n =-∑最小。
P 参数法一般用于固定分辨率下,目标所占整个图像比例已知的情况。
3.最大类间方差法(Otsu)最大类间方差法是由Otsu 于1979年提出的,是基于整幅图像的统计特性实现阈值的自动选取的,是全局二值化最杰出的代表。
Otsu 算法的基本思想是用某一假定的灰度值t 将图像的灰度分成两组,当两组的类间方差最大时,此灰度值t 就是图像二值化的最佳阈值。
设图像有L 个灰度值,取值范围在0~L-1,在此范围内选取灰度值T ,将图像分成两组G0和G1,G0包含的像素的灰度值在0~T ,G1的灰度值在T+1~L-1,用N 表示图像像素总数,i n 表示灰度值为i 的像素的个数。
已知:每一个灰度值i 出现的概率为/i i p n N =;假设G0和G1两组像素的个数在整体图像中所占百分比为01ϖϖ、,两组平均灰度值为01μμ、,可得概率:00=T ii p ϖ=∑11011L i i T p ωω-=+==-∑平均灰度值:00T i i ipμ==∑111L ii T i p μ-=+=∑图像总的平均灰度值:0011μϖμϖμ=+类间方差:()()()22200110101()g t ωμμωμμωωμμ=-+-=-最佳阈值为:T=argmax(g(t))使得间类方差最大时所对应的t 值。

图像预处理(⼆值化)图像预处理(⼆值化)本⽂的实验室主要通过opencv与python3实现,相关的代码可以在GitHub中找到。
1. 图像获取与灰度化通过摄像头获取到的图像为彩⾊的图像。
彩⾊图像主要分为两种类型,RGB及CMYK。
其中RGB的彩⾊图像是由三种不同颜⾊成分组合⽽成,⼀个为红⾊,⼀个为绿⾊,另⼀个为蓝⾊。
⽽CMYK类型的图像则由四个颜⾊成分组成:青C、品M、黄Y、⿊CMYK类型的图像主要⽤于印刷⾏业。
每个图像的像素通常对应于⼆维空间中⼀个特定的位置,并且有⼀个或者多个与那个点相关的采样值组成数值。
灰度图像,也称为灰阶图像,图像中每个像素可以由0(⿊)到255(⽩)的亮度值(Intensity)表⽰。
0-255之间表⽰不同的灰度级。
将彩⾊图像转化成为灰度图像的过程称为图像的灰度化处理。
灰度化,在RGB模型中,如果R=G=B时,则彩⾊表⽰⼀种灰度颜⾊,其中R=G=B的值叫灰度值,因此,灰度图像每个像素只需⼀个字节存放灰度值(⼜称强度值、亮度值),灰度范围为0-255。
彩⾊图像中的每个像素的颜⾊有R、G、B三个分量决定,⽽每个分量有255个值可取,这样⼀个像素点可以有1600多万(255255255)的颜⾊的变化范围。
⽽灰度图像⼀个像素点的变化范围为255种,所以在数字图像处理种⼀般先将各种格式的图像转变成灰度图像以使后续的图像的计算量变得少⼀些。
灰度图像的描述与彩⾊图像⼀样仍然反映了整幅图像的整体和局部的⾊度和亮度等级的分布和特征。
对于灰度化的⽅式有分量法、最⼤值法、平均值法,加权平均法等。
本⽂使⽤平均值法对图像进⾏灰度化。
对于平均值法,将彩⾊图像中的R、G、B三个分量的亮度求简单的平均值,将得到的值作为灰度值输出⽽得到灰度图。
其实现的表达式如下:通过实验得到得到如下图所⽰,灰度化前后:2.⼆值化通过以上对彩⾊图⽚进⾏灰度化以后,把获取到的灰度图像进⾏⼆值化处理。
对于⼆值化,其⽬的是将⽬标⽤户背景分类,为后续车道的识别做准备。

opencv二值化方法
OpenCV提供了多种二值化方法,用于将图像转换为黑白二值图像,以下是一些常用的二值化方法:
1. 全局阈值二值化,使用cv
2.threshold函数,将图像转换为二值图像,该函数需要指定阈值,超过阈值的像素点设为白色,否
则设为黑色。
2. 自适应阈值二值化,使用cv2.adaptiveThreshold函数,该方法根据图像局部区域的灰度值进行二值化处理,适用于光照不均
匀的图像。
3. Otsu's 二值化,使用cv2.threshold函数并指定参数
cv2.THRESH_OTSU,该方法会自动计算最佳阈值进行二值化,适用于
双峰图像。
4. 自定义阈值二值化,除了以上方法,还可以根据具体需求自
定义二值化方法,例如基于图像直方图的分布特点进行二值化处理。
在选择二值化方法时,需要考虑图像的特点、光照条件以及后
续处理的需求。
不同的二值化方法适用于不同的图像场景,因此在实际应用中需要根据具体情况选择合适的方法来进行二值化处理。
希望以上信息能够帮助到你。
图像⼆值化,阈值处理(⼗)图像⼆值化:基于图像的直⽅图来实现的,0⽩⾊ 1⿊⾊ 定义:图像的⼆值化,就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的只有⿊和⽩的视觉效果。
⼀幅图像包括⽬标物体、背景还有噪声,要想从多值的数字图像中直接提取出⽬标物体,常⽤的⽅法就是设定⼀个阈值T,⽤T将图像的数据分成两部分:⼤于T的像素群和⼩于T的像素群。
这是研究灰度变换的最特殊的⽅法,称为图像的⼆值化(Binarization)。
Python-OpenCV中提供了阈值(threshold)函数threshold(src, thresh, maxval, type, dst=None)函数:第⼀个参数 src 指原图像,原图像应该是灰度图。
第⼆个参数 x 指⽤来对像素值进⾏分类的阈值。
第三个参数 y 指当像素值⾼于(有时是⼩于)阈值时应该被赋予的新的像素值第四个参数 Methodsmethod阈值类型⼀般分为五种:cv2.THRESH_BINARY——⼤于阈值的部分像素值变为最⼤值,其他变为0cv2.THRESH_BINARY_INV——⼤于阈值的部分变为0,其他部分变为最⼤值cv2.THRESH_TRUNC——⼤于阈值的部分变为阈值,其余部分不变cv2.THRESH_TOZERO——⼤于阈值的部分不变,其余部分变为0cv2.THRESH_TOZERO_INV——⼤于阈值的部分变为0,其余部分不变import cv2 as cvimport numpy as np# 全局阈值def threshold_image(image):gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)cv.imshow("原来", gray)# ⼤律法,全局⾃适应阈值参数0可改为任意数字但不起作⽤ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_OTSU)print("yuzhi:%s" % ret)cv.imshow("OTSU", binary)# TRIANGLE法,,全局⾃适应阈值, 参数0可改为任意数字但不起作⽤,适⽤于单个波峰 ret, binary = cv.threshold(gray, 0, 255,cv.THRESH_BINARY | cv.THRESH_TRIANGLE) print("yuzhi:%s" % ret)cv.imshow("TRIANGLE", binary)# ⾃定义阈值为150,⼤于150的是⽩⾊⼩于的是⿊⾊ret, binary = cv.threshold(gray, 150, 255, cv.THRESH_BINARY)print("yuzhi:%s" % ret)cv.imshow("define_yuzhi", binary)# ⾃定义阈值为150,⼤于150的是⿊⾊⼩于的是⽩⾊ret, binary = cv.threshold(gray, 150, 255, cv.THRESH_BINARY_INV)print("yuzhi:%s" % ret)cv.imshow("define_rev", binary)# 截断⼤于150的是改为150 ⼩于150的保留ret, binary = cv.threshold(gray, 150, 255, cv.THRESH_TRUNC)print("yuzhi:%s" % ret)cv.imshow("jieduan1", binary)# 截断⼩于150的是改为150 ⼤于150的保留ret, binary = cv.threshold(gray, 150, 255, cv.THRESH_TOZERO)print("yuzhi:%s" % ret)cv.imshow("jieduan2", binary)src = cv.imread("yiner.jpg")threshold_image(src)cv.waitKey(0)cv.destroyAllWindows()函数threshold()的参数说明:#⼤律法,全局⾃适应阈值参数0可改为任意数字但不起作⽤cv.THRESH_BINARY | cv.THRESH_OTSU#TRIANGLE法,,全局⾃适应阈值, 参数0可改为任意数字但不起作⽤,适⽤于单个波峰cv.THRESH_BINARY | cv.THRESH_TRIANGLE# ⾃定义阈值为150,⼤于150的是⽩⾊⼩于的是⿊⾊cv.THRESH_BINARY# ⾃定义阈值为150,⼤于150的是⿊⾊⼩于的是⽩⾊cv.THRESH_BINARY_INV# 截断⼤于150的是改为150 ⼩于150的保留cv.THRESH_TRUNC# 截断⼩于150的是改为150 ⼤于150的保留cv.THRESH_TOZERO对应的阈值1 函数adaptiveThreshold( src,maxValue,adaptiveMethod,thresholdType,blockSize,C,dst=None)2 参数解说.第⼀个src:原始图像第⼆个maxValue:像素值上限第三个⾃适应⽅法adaptiveMethod: — cv2.ADAPTIVE_THRESH_MEAN_C :领域内均值 —cv2.ADAPTIVE_THRESH_GAUSSIAN_C :领域内像素点加权和,权重为⼀个⾼斯窗⼝第四个值的赋值⽅法: 只有cv2.THRESH_BINARY 和cv2.THRESH_BINARY_INV第五个blockSize 规定领域⼤⼩(⼀个正⽅形的领域)第六个常数C, 阈值等于均值或者加权值减去这个常数(为0相当于阈值就是求得领域内均值或者加权值) 这种⽅法理论上得到的效果更好,相当于在动态⾃适应的调整属于⾃⼰像素点的阈值,⽽不是整幅图像都⽤⼀个阈值。
halcon 二值化阈值在图像处理中,二值化是一种常见且重要的操作。
通过将图像中的像素灰度值映射为黑白两种颜色,从而将图像转化为只有黑白两种颜色的二值图像。
在Halcon软件中,二值化操作是非常常用的,并且Halcon提供了多种二值化阈值的计算方法,以适应不同的图像处理需求。
一、二值化简介二值化是将一幅图像转换为只有两种颜色的图像的过程。
这两种颜色通常是黑色和白色,也可以是其他两种特定的颜色。
二值化可以分割图像中的目标物体和背景,减少图像中的信息量,提取所需的目标特征,用于后续的图像处理和分析。
二、Halcon二值化方法Halcon提供了多种二值化阈值的计算方法,下面将分别介绍常用的几种方法。
1. 固定阈值法固定阈值法是最简单、最直接的二值化方法之一。
通过选择一个固定的灰度值作为阈值,大于该灰度值的像素设为白色,小于该灰度值的像素设为黑色。
具体操作步骤如下:①使用read_image函数将图像读入Halcon中。
②使用threshold函数进行固定阈值化处理,指定阈值。
③使用write_image函数将二值化后的图像保存。
2. 标准差法标准差法是根据图像灰度值的标准差进行二值化的方法。
通过计算整个图像的灰度标准差,将标准差的一定倍数作为阈值进行二值化。
具体操作步骤如下:①使用read_image函数将图像读入Halcon中。
②使用deviation_image函数计算图像的标准差。
③选择适当的倍数作为阈值放入threshold函数中进行二值化处理。
④使用write_image函数将二值化后的图像保存。
3. 迭代方法迭代方法是根据图像灰度直方图的波峰和波谷进行二值化的方法。
通过找到波峰和波谷之间的最佳阈值,进行二值化处理。
具体操作步骤如下:①使用read_image函数将图像读入Halcon中。
②使用gray_histo函数计算图像的灰度直方图。
③使用regulate函数对灰度直方图进行处理,得到平滑的直方图。
二值化图像?二值化——图像只有两种色,黑白。
0-1,0=黑,1=白灰度:0-255彩色:255,255,255定义:图像的二值化,就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的只有黑和白的视觉效果。
一幅图像包括目标物体、背景还有噪声,要想从多值的数字图像中直接提取出目标物体,常用的方法就是设定一个阈值T,用T将图像的数据分成两部分:大于T的像素群和小于T的像素群。
这是研究灰度变换的最特殊的方法,称为图像的二值化(Binarization)。
其实图像二值化的方法有不下二十种。
一般分为Global和Local两类,区别就是寻找那个阈值的时候使用到了哪里的信息。
一般是为了将感兴趣目标和背景分离。
图像的二值化是最简单的图像处理技术,它一般都跟具体算法联系在一起,很多算法的输入需要是二值数据。
比如你把图像文字转换为PDF 文字,PDF上只能是黑白两种颜色。
比如你给二维码解码,你需要知道哪块黑哪块白。
去掉图像两个字,二值化在视觉里面应用场景多一些。
比如早期的人脸检测很多手势识别的方法,第一步要找到皮肤块,所以需要把图像分为皮肤区域和非皮肤区域,这也算是一种二值化,但通常在方法上用的可能不是基于直方图的了(可能是ID3,随机森林,SVM,甚至神经网络)。
比如Haar特征,以及后来的BRIEF和FAST等,还有LBP实际上都是用到二值的思想。
图像二值化可以看作是聚类,可以看作是分类……这些其实不重要,重要的是它快。
它最明显的意义就是简化后期的处理,提高处理的速度。
`但是单一的图像二值化方法(指基于直方图的二值化)往往比不过其他的方法,因为,毕竟你信息丢了太多。
但是二值化快啊……你可以进行一百次不同的二值化,然后再得到一个更好的结果……上面右图中下面两个图是还可以对二值图像进行编码。
编码后就更好压缩了,那么我们就可以高度节省内存。
图像二值化方法:全局阈值局部阈值9.2 OpenCV中图像二值化方法:评判某个算法是否好,就看二值化图像信息是否丢失了很多。
图像的二值化①状态法 (1)②判别分析法 (2)③双固定阈值法 (2)完成许多图像处理步骤之后,通常希望剔除图像中高于或低于某一值的像素。
二值化也是图像分割的一种有效方法。
图像的二值化是按以下式(3)进行的:1,(,)(,)0,(,)k k k G i j T R i j G i j T ≥⎧=⎨<⎩(3) 上式中的(,)k G i j 表示位于(,)i j 处像素的灰度值;(,)k R i j 表示二值化后(,)i j 处的像素值,此时,只能取0或1,其中:(,)0k R i j =时,表示背景,(,)1k R i j =时,表示前景;T 为用于二值化的阈值。
阈值化的过程比较简单,关键是阈值的选取问题。
几种常用的阈值确定方法①状态法实际上确定阈值T 也需要一定的先验知识,若图像的灰度分布直方图有明显的双峰值特性,如图2所示,这时可以将阈值T 取在两个峰值之间谷底那点的灰度值。
当在图像中运动目标和背景的灰度值相差很大的时候,直方图中会有明显的谷底。
此时,谷底左侧的是图像的背景灰度值,谷底右侧的是图像中的运动目标。
但是在复杂的图像中,图像的灰度分布直方图中没有明显的波谷,因而这种方法就不适用。
阈值T图2 双峰直方图②判别分析法在灰度分布直方图中将灰度的集合用阈值T 分成两组,一组的灰度值低于阈值T ,另一组高于阈值T 。
阈值T 就是两组灰度集合的最佳分离值,这就是判别分析法的基本思想。
判别分析法通常是根据两组灰度平均值的方差(称为组间方差)和各组的方差(称为组内方差)的比来求出最佳分离阈值T 的,当组间方差与组内方差之比为最大时,对应的灰度分离值T 就是最佳分离值。
③双固定阈值法双固定阈值法使用两个固定的阈值12T T 与,并且12T T <。
当图像中某一像素值(,)G x y 的值小于1T 时,就将像素值置为0或1;当图像中的像素值(,)G x y 在12T T 与之间时,就将像素值置为1或0;当图像中的像素值(,)G x y 大于2T 时,就将像素值置为0或1。