灰度图像二值化方法研究
- 格式:doc
- 大小:1.12 MB
- 文档页数:22

二值化方法二值化是图像处理中一种常用的阈值分割方法。
它可以将图像分割成黑白两种颜色,从而使图像更容易处理,并减少图像的尺寸大小。
换句话说,它是一种将图像转换成只有黑白两种颜色的方法。
二值化被广泛应用于各种图像处理应用程序中,包括图像掩码、模板匹配等。
它可以用于在自然图像中提取特定对象,也可以分离噪声,使图像易于识别。
此外,它还可以用于更高级的图像处理应用,如视觉检测和人脸识别。
二值化常用的方法有多种,比如自适应阈值法、最大类间方差法、最小阈值法等。
其中自适应阈值法是一种简单易行的方法,其核心是在每一个像素的领域内,根据灰度值的大小决定阈值。
它可以在不同的图像中针对不同的区域生成更好的阈值,从而产生更好的二值化结果。
最大类间方差法也称为“大津法”,是一种根据图像的灰度直方图来进行阈值分割的算法。
它从图像中提取灰度直方图,并使用类间方差来计算图像的最佳阈值。
它可以有效地分割图像,从而产生更好的二值化结果。
最小阈值法是一种针对噪声图像的阈值分割方法。
它使用一种特殊的算法来识别噪声,并找出最佳的阈值,使得噪声尽可能少地影响最终的二值化结果。
除了上述常用的阈值分割方法之外,还有一些其他的方法,比如变量凝聚分割、迭代阈值匹配等,可以用于更加精细的二值化处理。
此外,有些二值化算法还可以被应用于无线电信号处理。
二值化是图像处理中一种广泛应用的阈值分割方法,它可以使图像更有效地处理,并减少图像的尺寸大小。
它的主要目的是针对不同的图像种类生成最佳的阈值,以使图像得到最佳的二值化结果。
它也被广泛用于图像掩码、模板匹配等多种应用中,并且还可以被应用于更高级的图像处理应用程序,如视觉检测和人脸识别。
然而,由于它的复杂性,二值化方法仍需要更多的研究和改进,以使其在实际应用中产生更好的效果。
二值化阈值的选取方法
在进行二值化阈值选取时,可以采用以下几种常用的方法:
1. Otsu方法:Otsu方法是一种自适应的阈值选取方法,它能够根据图像的灰度分布自动选择最佳的阈值。
该方法首先计算图像的灰度直方图,然后根据直方图信息计算类间方差最小的阈值作为二值化阈值。
2. 基于峰值的方法:该方法通过寻找图像灰度直方图中的峰值来选取二值化阈值。
通常情况下,图像的背景和前景分别对应两个峰值。
可以选择两峰之间的谷底作为二值化阈值。
3. 基于聚类的方法:该方法通过对图像灰度值进行聚类来选取二值化阈值。
常用的聚类方法有K-means聚类和谱聚类等。
通过将灰度值分成两个簇,可以选择两个簇之间的分割点作为阈值。
4. 基于直方图的方法:该方法通过分析图像的灰度直方图,选择能够合理区分图像前景和背景的阈值。
可以根据直方图的形状、波峰和波谷等特征来选取阈值。
5. 基于统计分析的方法:该方法通过分析图像的灰度统计特征,例如均值、方差、中位数等,选择合适的阈值。
可以根据前景和背景的灰度分布特征来选择阈值。
以上方法中,Otsu方法是一种常用且较为常见的二值化阈值选取方法,可以适用于大多数图像二值化的场景。
但对于特殊图像场景,其他方法也可能更适合选择二值化阈值。
二值化处理的原理及其应用一、什么是二值化处理二值化处理,也称为二值图像处理,指的是将一副灰度图像转化为只包含两种颜色的图像。
通常情况下,这两种颜色是黑色和白色,也可以是其他两种自定义颜色。
二、二值化处理的原理二值化处理的原理基于图像的灰度分布。
在灰度图像中,每个像素点的灰度值都是介于0(黑色)和255(白色)之间的一个数值。
二值化处理通过设定一个阈值将灰度图像的像素点分为两个类别:低于阈值的像素点被设置为0(黑色),高于阈值的像素点被设置为255(白色)。
常用的二值化处理算法有全局阈值算法、局部阈值算法和自适应阈值算法。
1. 全局阈值算法全局阈值算法是最简单的二值化算法之一。
它假设整个图像的前景和背景的灰度值之间存在一个明显的分界点,通过选取合适的阈值将图像二值化。
常见的全局阈值算法有基于固定阈值的大津算法、基于最大熵的最大类间方差法等。
这些算法通过计算像素灰度值的全局分布,选择一个合适的阈值,以实现二值化处理。
2. 局部阈值算法局部阈值算法考虑到图像不同区域的灰度分布不一致性,采用不同的阈值对图像进行分割。
常用的局部阈值算法有均值阈值法、中值阈值法等。
这些算法通过计算像素周围邻域的平均灰度值或中值,以确定每个像素的二值化阈值。
这样可以更好地适应图像中不同区域的灰度特征,提高二值化效果。
3. 自适应阈值算法自适应阈值算法是对全局阈值算法和局部阈值算法的一种改进。
它根据每个像素的局部特征,自适应地选择阈值。
常见的自适应阈值算法有基于局部均值的局部二值化算法、基于局部方差的局部二值化算法等。
这些算法通过考虑像素周围邻域的灰度统计特征,提高了对不同区域的灰度分布的适应能力。
三、二值化处理的应用二值化处理在图像处理和计算机视觉领域被广泛应用。
以下是几个常见的应用场景:1.文字识别:二值化处理可以将图像中的文字区域与背景区域分开,使得文字更容易提取和识别。
2.边缘检测:二值化处理可以将图像中的边缘区域提取出来,用于图像的边缘检测和轮廓分析。
Matlab在图像处理领域有着广泛的应用,其中灰度处理和二值化处理是常见的图像处理方法之一。
本文将详细介绍Matlab中的灰度处理和二值化处理的原理和实现方法。
一、灰度处理1. 灰度图像的概念灰度图像是指图像中每个像素的灰度值介于0-255之间的图像。
在灰度图像中,0代表黑色,255代表白色,中间的灰度值代表了不同程度的灰色。
2. 灰度处理的原理灰度处理是将彩色图像转换为灰度图像的过程。
在Matlab中,可以通过以下公式实现灰度处理:灰度值 = 0.299 * R + 0.587 * G + 0.114 * B其中,R、G、B分别代表彩色图像中的红色、绿色和蓝色分量。
通过对每个像素的RGB分量进行加权求和,可以得到对应的灰度值。
3. 灰度处理的实现在Matlab中,可以使用`rgb2gray`函数实现灰度处理。
具体的代码如下:```matlab读取彩色图像rgbImage = imread('example.jpg');灰度处理grayImage = rgb2gray(rgbImage);显示灰度图像imshow(grayImage);```二、二值化处理1. 二值化图像的概念二值化图像是指将灰度图像中的像素值转换为0或255的图像。
在二值化图像中,像素值为0代表黑色,像素值为255代表白色。
2. 二值化处理的原理二值化处理的目的是将灰度图像中的灰度值转换为0或255。
一般可以通过设置一个阈值,将低于阈值的像素值设为0,将高于阈值的像素值设为255。
3. 二值化处理的实现在Matlab中,可以使用`im2bw`函数实现二值化处理。
具体的代码如下:```matlab读取灰度图像grayImage = imread('example_gray.jpg');设置阈值threshold = 128;二值化处理binaryImage = im2bw(grayImage, threshold/255);显示二值化图像imshow(binaryImage);```三、总结本文详细介绍了Matlab中灰度处理和二值化处理的原理和实现方法。
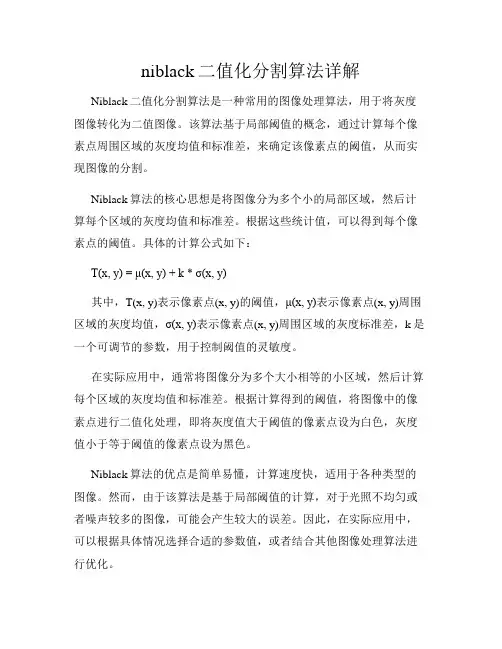
niblack二值化分割算法详解Niblack二值化分割算法是一种常用的图像处理算法,用于将灰度图像转化为二值图像。
该算法基于局部阈值的概念,通过计算每个像素点周围区域的灰度均值和标准差,来确定该像素点的阈值,从而实现图像的分割。
Niblack算法的核心思想是将图像分为多个小的局部区域,然后计算每个区域的灰度均值和标准差。
根据这些统计值,可以得到每个像素点的阈值。
具体的计算公式如下:T(x, y) = μ(x, y) + k * σ(x, y)其中,T(x, y)表示像素点(x, y)的阈值,μ(x, y)表示像素点(x, y)周围区域的灰度均值,σ(x, y)表示像素点(x, y)周围区域的灰度标准差,k是一个可调节的参数,用于控制阈值的灵敏度。
在实际应用中,通常将图像分为多个大小相等的小区域,然后计算每个区域的灰度均值和标准差。
根据计算得到的阈值,将图像中的像素点进行二值化处理,即将灰度值大于阈值的像素点设为白色,灰度值小于等于阈值的像素点设为黑色。
Niblack算法的优点是简单易懂,计算速度快,适用于各种类型的图像。
然而,由于该算法是基于局部阈值的计算,对于光照不均匀或者噪声较多的图像,可能会产生较大的误差。
因此,在实际应用中,可以根据具体情况选择合适的参数值,或者结合其他图像处理算法进行优化。
除了Niblack算法,还有一些其他常用的二值化分割算法,如Sauvola算法、Otsu算法等。
这些算法在具体实现上有所不同,但基本思想都是通过计算像素点周围区域的统计值来确定阈值,从而实现图像的分割。
总之,Niblack二值化分割算法是一种简单有效的图像处理算法,可以将灰度图像转化为二值图像。
通过计算每个像素点周围区域的灰度均值和标准差,来确定该像素点的阈值,从而实现图像的分割。
在实际应用中,可以根据具体情况选择合适的参数值,或者结合其他图像处理算法进行优化,以达到更好的分割效果。
内蒙古科技大学本科毕业论文二〇一二年四月摘要本文介绍了图像及数字图像处理技术的一些概念和相关知识;还介绍了灰度图像和图像二值化的概念及其表示形式;对图像灰度化和图像二值化的优缺点作了简单的的介绍;重点介绍了灰度图像的二值化方法研究,其包括的内容有二值化研究动态和研究方法;对全局阈值法;局部阈值法这两种方法进行了研究讨论。
关键字:图像处理、二值化、图像、阈值AbstractThis paper introduces the image and digital image processing technology of some concepts and related knowledge; also introduced the gray-scale image and the images of the two values of the concept and its representation; grayscale images and images of the two values of the advantages and disadvantages to make simple introduction; mainly introduces two gray image binarization method, its includes the contents of two values of research and research methods; the global threshold method; local threshold method, the two methods are discussed. Keywords:image processing, image, threshold value of two,目录引言 (5)1.灰度图像与二值图像 (6)1.1图像 (6)1.2数字图像 (6)1.2.1彩色图像 (6)1.2.2灰度图像 (7)1.2.3二值图像 (7)2.灰度图像二值化方法研究 (8)2.1全局阈值法 (8)2.1.1全局阈值法的概念 (8)2.1.2全局阈值法的方法 (9)2.1.3全局阈值法的优缺点介绍及阈值选取 (11)2.2局部阈值法 (11)2.2.1局部阈值法的概念 (11)2.2.2局部阈值法的方法 (12)2.2.3局部阈值法的优缺点介绍 (12)3.灰度图像二值化的应用 (12)结束语 (14)参考文献 (15)致谢 (16)引言图像二值化是图像处理中的一项基本技术,也是很多图像处理技术的预处理过程。
图像处理中的图像二值化算法随着科技的发展,图像处理技术应用越来越广泛。
作为一项基础技术,图像二值化算法在图像处理中扮演着非常关键的角色,它可以将图像分割成黑白两种颜色,也就是将图像中的灰度值转化为0和1,简化了后续的处理流程。
本文将介绍图像二值化算法的基本原理和应用情况。
一、二值化算法的基本原理在图像中,每个像素都有一定的灰度值,在8位灰度图像中,灰度值的范围在0-255之间,其中0是代表黑色,255代表白色。
当我们需要处理一张图片时,如果直接对每一个灰度值进行处理,那么处理的过程就会非常繁琐,因此,我们需要将图像灰度值转化为0和1两种数字进行处理。
常见的二值化算法有全局阈值算法、局部阈值算法、自适应阈值算法、基于梯度算法等。
其中,全局阈值算法是最基本、最简单的一种算法。
它将整张图像分成黑白两个部分,通过将整个图像的像素点的灰度值与一个固定的阈值进行比较,如果像素点的灰度值大于阈值,就将该像素点的灰度值置为1,否则置为0。
使用全局二值化算法的步骤如下:1.将图像读入到内存中;2.将图像转化为灰度图像;3.计算整个图像的平均灰度值,该平均灰度值作为全局阈值;4.将图像中每个像素点的灰度值与该全局阈值进行比较,灰度值大于等于该全局阈值的像素点赋值为255(代表白色),小于该阈值的像素点赋值为0(代表黑色);5.输出处理后的图像。
当然,这种方法的缺点也非常明显,那就是无法适应不同场合下的图像处理需求,处理效果难以保证。
因此,我们需要更为灵活的算法和方法来进行二值化处理。
二、不同类型的二值化算法1.基于直方图的全局阈值法二值化算法中的全局阈值算法通常是将整个图像分成两类像素:一类像素比较暗,另一类像素比较亮。
在直方图中,该分割就是直方图上的两个峰。
我们可以通过直方图分析来确定这个阈值,并将灰度值低于阈值的像素变为黑色,将灰度值高于阈值的像素变为白色。
对于图像I(x,y),它的灰度直方图h(i)可以表示为:h(i) = N(i) / MN (i=0,1,…,L-1)其中N(i)是图像中所有像素灰度值为i的像素数量,MN是总的像素数量,L是灰度级别数量(在8位图像中,L等于256)然后我们需要确定一个阈值T,所有像素点的灰度值小于T的变为黑色,大于等于T的变为白色。
机器视觉中的二值化与边缘检测技术研究随着科技的不断进步,在机器视觉领域中的二值化和边缘检测技术已经成为了必不可少的技术手段。
本文将介绍机器视觉中的二值化和边缘检测技术的概念和原理,并阐述其在实际应用中的重要性。
一、二值化技术概述二值化是指将灰度图像的像素值转化为0或1的二维矩阵,用于分离目标对象和背景。
二值化技术是图像处理中最常用的基本处理方法之一,其实现原理是将图像中的灰度值映射到0和255两个灰度值之间,从而使得图像呈现出黑白分明的效果,便于后续的处理和分析。
在机器视觉领域,二值化技术可应用于图像的分割、识别、增强和去噪等方面。
例如,在OCR文字识别中,采用二值化技术将图片转化为黑白图像,可以大大提高识别准确率。
此外,在医学图像分析中,二值化技术可用于识别疾病病变区域,提高医学诊断的准确性。
二、边缘检测技术概述边缘检测是指在图像中寻找边缘的过程。
在图像中,边缘一般被定义为颜色、亮度等突变的地方,它是图像中最基本的特征之一。
边缘检测技术可应用于目标检测、视觉跟踪、图像分割、三维重建等领域。
常用的边缘检测算法包括Canny算子、Sobel算子和Laplacian 算子等。
Canny算子是一种常见的边缘检测算法,其将边缘检测问题转化为一个优化问题,并采用高斯滤波、非极大值抑制和双阈值等方法进行边缘检测。
三、二值化和边缘检测的应用案例1、物体识别在智能制造领域,二值化和边缘检测技术可应用于物体识别和分拣领域。
例如,对于自动化仓库中的物品识别,采用二值化和边缘检测技术可以准确识别出目标物体并进行分拣。
2、人脸检测在安防领域,人脸识别技术已经得到广泛应用。
在人脸检测的过程中,需要对人脸图像进行二值化和边缘检测操作,以获取人脸的轮廓并进行特征提取和分析。
3、医学诊断在医学诊断中,二值化和边缘检测技术可用于识别疾病病变区域。
例如,在肺癌病人的CT图像中,通过对图像进行二值化和边缘检测,可以准确识别出病变部位,为医生的诊断提供支持。
数字图像处理实验报告学号姓名日期实验一灰度图像的二值化处理一、实验目的图像二值化是数字图像处理技术中的一项基本技术,二值化图像的显示与打印十分方便,存储与传输也非常容易,在目标识别、图像分析、文本增强、字符识别等领域得到广泛应用。
图像二值化是将灰度图像转化为只有黑白两类像素的图像,大多采用阈值化算法处理。
在不同的应用中,阈值的选取决定着图像特征信息的保留。
因此,图像二值化技术的关键在于如何选取阈值。
二、实验内容1、编程绘制数字图像的直方图。
2、灰度图像二值化处理。
三、实验要求1、自己选择灰度图像。
2、选择多种阈值分割算法,并比较和分析图像二值化处理的结果。
3、使用VC++编程序。
四、设计思想(阈值选取算法)灰度图像是指只含亮度信息,不含色彩信息的图像, 将彩色图像转化成为灰度图像的过程称为图像的灰度化处理。
图像的二值化处理就是将图像上的点的灰度置为0或255,也就是使整个图像呈现出明显的黑白效果。
即将256个亮度等级的灰度图像通过适当的阀值选取而获得仍然可以反映图像整体和局部特征的二值化图像。
(1)全局阈值法:全局阈值法是指在二值化过程中只使用一个全局阈值T的方法。
它将图像的每个像素的灰度值与T进行比较,若大于T,则取为前景色(白色);否则,取为背景色。
典型的全局阈值方法包括Otsu方法、最大熵方法等。
为了满足图像处理应用系统自动化及实时性要求,图像二值化的阈值的选择最好由计算机自动来完成(平均灰度值法,大津法,边缘算子法)。
(2)局部阈值法:局部阈值法一般用于识别干扰比较严重、品质较差的图像,相对整体阈值方法有更广泛的应用,但也存在缺点和问题,如实现速度慢、不能保证字符笔画连通性以及容易出现伪影现象(即在背景域受到噪音干扰得到笔画结果)等。
比较典型的局部二值化算法有Bernsen方法、多阈值的梯度强度法、基于纹理图像的方法、最大方差法等。
五、源程序(附上注释)#include "stdafx.h"#include "mydib.h"void rectcoding(HDIB hDIB,int wRect,int hRect){// 指向源图像象素的指针unsigned char * lpSrc;// 指向DIB的指针LPSTR lpDIB;// 指向DIB象素指针LPSTR lpDIBBits;//锁定并获得位图句柄的地址lpDIB = (LPSTR) ::GlobalLock((HGLOBAL) hDIB);// 判断是否是8-bpp位图(这里为了方便,只处理8-bpp位图的模糊操作,其它的可以类推)if (::DIBNumColors(lpDIB) != 256){// 提示用户::AfxMessageBox ("目前只支持256色位图的运算!");// 返回return;}// 找到DIB图像象素起始位置lpDIBBits = ::FindDIBBits(lpDIB);//图像处理操作//方块编码//获得图像的宽度和高度LONG lWidth=::DIBWidth ((char*)lpDIB);LONG lHeight=::DIBHeight ((char*)lpDIB);// 计算图像每行的字节数LONG lLineBytes = WIDTHBYTES(lWidth * 8);if(lWidth!=lHeight){// 提示用户::AfxMessageBox("只能对宽度和高度相等的图像进行方块编码!");// 返回return;}//编码过程//循环变量LONG i,j,k;int ii,jj;double* Xt=new double [lWidth*lHeight/(hRect*wRect)];int Xi;int* a0=new int [lWidth*lHeight/(hRect*wRect)];int* a1=new int [lWidth*lHeight/(hRect*wRect)];int* N0=new int [lWidth*lHeight/(hRect*wRect)];int* N1=new int [lWidth*lHeight/(hRect*wRect)];//计算阈值k=0;for (i = 0; i < lHeight; i =i+hRect){for (j = 0; j < lWidth; j =j+wRect){Xt[k]=0;//计算Xtfor(ii=0;ii<hRect;ii++)for(jj=0;jj<wRect;jj++){ // 指向图像指针lpSrc = (unsigned char *)lpDIBBits + lLineBytes * (i+ii) + (j+jj);Xi=*lpSrc;Xt[k]+=Xi;}Xt[k]/=hRect*wRect;k++;}}//计算N0、N1k=0;for (i = 0; i < lHeight; i =i+hRect){for (j = 0; j < lWidth; j =j+wRect){N0[k]=0;N1[k]=0;//计算N0、N1for(ii=0;ii<hRect;ii++)for(jj=0;jj<wRect;jj++){ // 指向图像指针lpSrc = (unsigned char *)lpDIBBits + lLineBytes * (i+ii) + (j+jj);Xi=*lpSrc;if(Xi<Xt[k]) N0[k]++;else N1[k]++;}k++;}}//计算a0、a1k=0;for (i = 0; i < lHeight; i =i+hRect){for (j = 0; j < lWidth; j =j+wRect){a0[k]=0;a1[k]=0;//计算N0、N1for(ii=0;ii<hRect;ii++)for(jj=0;jj<wRect;jj++){ // 指向图像指针lpSrc = (unsigned char *)lpDIBBits + lLineBytes * (i+ii) + (j+jj);Xi=*lpSrc;if(Xi<Xt[k]) a0[k]+=Xi;else a1[k]+=Xi;}if(N0[k]!=0&&N1[k]!=0){ a0[k]/=N0[k];a1[k]/=N1[k];}k++;}}//二值化编码过程k=0;for (i = 0; i < lHeight; i =i+hRect){for (j = 0; j < lWidth; j =j+wRect){for(ii=0;ii<hRect;ii++)for(jj=0;jj<wRect;jj++){ // 指向图像指针lpSrc = (unsigned char *)lpDIBBits + lLineBytes * (i+ii) + (j+jj);Xi=*lpSrc;if(Xi<Xt[k]) Xi=a0[k];else Xi=a1[k];//赋新的像素值给像素*lpSrc=Xi;}k++;}}::GlobalUnlock((HGLOBAL) hDIB);}六、实验结果及实验分析处理前二值化后七、个人体会在整个的图像二值化过程中比较经典的二值化方法就是Otsu 算法和Bernsen 算法。
【数字图像处理】灰度图像⼆值化灰度图像每副图像的每个像素对应⼆维空间中⼀个特定的位置,并且有⼀个或者多个与那个点相关的采样值组成数值。
灰度图像,也称为灰阶图像,图像中每个像素可以由0(⿊)到255(⽩)的亮度值(Intensity)表⽰。
0-255之间表⽰不同的灰度级。
灰度图像⼆值化⼆值化:以⼀个值(阈值)为基准,⼤于(等于)这个值的数全部变为是1(或者0),⼩于等于这个数的就全部将他们变为0(或1)。
⼆值化算法处理飞思卡尔赛道思路:设定⼀个阈值valve,对于图像矩阵中的每⼀⾏,从左⾄右⽐较各像素值和阈值的⼤⼩,若像素值⼤于或等于阈值,则判定该像素对应的是⽩⾊赛道;反之,则判定对应的是⿊⾊的⽬标引导线。
记下第⼀次和最后⼀次出现像素值⼩于阈值时的像素点的列号,算出两者的平均值,以此作为该⾏上⽬标引导线的位置。
摄像头的⼆值化的代码:Void image_binaryzation(){for(int i=0;i{for(int j=0;j{if(Image[i][j] >= Threshold)Image_new[i][j]=1;elseImage_new[i][j]=0;}}}Row是对应采集到的⾏数,Col是列数,Image[i][j]是摄像头采集未⼆值化的数据存放的数组,Img[i][j]是新建的存放⼆值化后的数组。
合适的阈值在阈值⼆值化中,最主要的是选取合适的阈值,这也是⼆值化的难点所在。
常⽤的⼆值化阈值选取⽅法有双峰法、p参数法、⼤律法(Otsu法)、最⼤熵阈值法、迭代法等。
⼤律法(Otsu法)Otsu⽅法⼜名最⼤类间差⽅法,通过统计整个图像的直⽅图特性来实现全局阈值T的⾃动选取,其算法步骤为:1) 先计算图像的直⽅图,即将图像所有的像素点按照0~255共256个bin,统计落在每个bin的像素点数量2) 归⼀化直⽅图,也即将每个bin中像素点数量除以总的像素点3) i表⽰分类的阈值,也即⼀个灰度级,从0开始迭代4) 通过归⼀化的直⽅图,统计0~i 灰度级的像素(假设像素值在此范围的像素叫做前景像素) 所占整幅图像的⽐例w0,并统计前景像素的平均灰度u0;统计i~255灰度级的像素(假设像素值在此范围的像素叫做背景像素) 所占整幅图像的⽐例w1,并统计背5) 计算前景像素和背景像素的⽅差 g = w0*w1*(u0-u1) (u0-u1)6) i++;转到4),直到i为256时结束迭代7)将最⼤g相应的i值作为图像的全局阈值缺陷:OSTU算法在处理光照不均匀的图像的时候,效果会明显不好,因为利⽤的是全局像素信息。
图像预处理(⼆值化)图像预处理(⼆值化)本⽂的实验室主要通过opencv与python3实现,相关的代码可以在GitHub中找到。
1. 图像获取与灰度化通过摄像头获取到的图像为彩⾊的图像。
彩⾊图像主要分为两种类型,RGB及CMYK。
其中RGB的彩⾊图像是由三种不同颜⾊成分组合⽽成,⼀个为红⾊,⼀个为绿⾊,另⼀个为蓝⾊。
⽽CMYK类型的图像则由四个颜⾊成分组成:青C、品M、黄Y、⿊CMYK类型的图像主要⽤于印刷⾏业。
每个图像的像素通常对应于⼆维空间中⼀个特定的位置,并且有⼀个或者多个与那个点相关的采样值组成数值。
灰度图像,也称为灰阶图像,图像中每个像素可以由0(⿊)到255(⽩)的亮度值(Intensity)表⽰。
0-255之间表⽰不同的灰度级。
将彩⾊图像转化成为灰度图像的过程称为图像的灰度化处理。
灰度化,在RGB模型中,如果R=G=B时,则彩⾊表⽰⼀种灰度颜⾊,其中R=G=B的值叫灰度值,因此,灰度图像每个像素只需⼀个字节存放灰度值(⼜称强度值、亮度值),灰度范围为0-255。
彩⾊图像中的每个像素的颜⾊有R、G、B三个分量决定,⽽每个分量有255个值可取,这样⼀个像素点可以有1600多万(255255255)的颜⾊的变化范围。
⽽灰度图像⼀个像素点的变化范围为255种,所以在数字图像处理种⼀般先将各种格式的图像转变成灰度图像以使后续的图像的计算量变得少⼀些。
灰度图像的描述与彩⾊图像⼀样仍然反映了整幅图像的整体和局部的⾊度和亮度等级的分布和特征。
对于灰度化的⽅式有分量法、最⼤值法、平均值法,加权平均法等。
本⽂使⽤平均值法对图像进⾏灰度化。
对于平均值法,将彩⾊图像中的R、G、B三个分量的亮度求简单的平均值,将得到的值作为灰度值输出⽽得到灰度图。
其实现的表达式如下:通过实验得到得到如下图所⽰,灰度化前后:2.⼆值化通过以上对彩⾊图⽚进⾏灰度化以后,把获取到的灰度图像进⾏⼆值化处理。
对于⼆值化,其⽬的是将⽬标⽤户背景分类,为后续车道的识别做准备。
图像处理——灰度化、⼆值化、膨胀算法、腐蚀算法以及开运算和闭运算⼀、RGBRGB模式使⽤为图像中每个的RGB分量分配⼀个0~255范围内的强度值。
RGB仅仅使⽤三种颜⾊,R(red)、G(green)、B(blue),就能够使它们依照不同的⽐例混合,在上呈现16777216(256 * 256 * 256)种颜⾊。
在电脑中,RGB的所谓“多少”就是指亮度,并使⽤整数来表⽰。
通常情况下,RGB各有256级亮度,⽤数字表⽰为从0、1、2...直到255。
⼆、ARGB⼀种,也就是⾊彩模式附加上Alpha()通道,常见于32位的。
ARGB---Alpha,Red,Green,Blue.三、灰度化在RGB模型中,假设R=G=B时,则彩⾊表⽰⼀种灰度颜⾊,当中R=G=B的值叫灰度值,因此,灰度图像每⼀个像素仅仅需⼀个字节存放灰度值(⼜称强度值、亮度值),灰度范围为0-255。
⼀般有下⾯四种⽅法对彩⾊图像进⾏灰度化,详细⽅法參考: 四、⼆值化⼀幅图像包含⽬标物体、背景还有噪声,要想从多值的数字图像中直接提取出⽬标物体,最经常使⽤的⽅法就是设定⼀个全局的阈值T,⽤T 将图像的数据分成两部分:⼤于T的像素群和⼩于T的像素群。
将⼤于T的像素群的像素值设定为⽩⾊(或者⿊⾊),⼩于T的像素群的像素值设定为⿊⾊(或者⽩⾊)。
⽐⽅:计算每个像素的(R+G+B)/3,假设>127,则设置该像素为⽩⾊,即R=G=B=255;否则设置为⿊⾊,即R=G=B=0。
C#实现代码例如以下:public Bitmap binarization(){Bitmap bitImage = new Bitmap(pictureBox1.Image);//⼆值化pictureBox1中的图⽚Color c;int height = pictureBox1.Image.Height;int width = pictureBox1.Image.Width;for (int i = 0; i < height; i++){for (int j = 0; j < width; j++){c = bitImage.GetPixel(j,i);int r = c.R;int g = c.G;int b = c.B;if ((r + g + b) / 3 >= 127){bitImage.SetPixel(j, i, Color.FromArgb(255, 255, 255));}else{bitImage.SetPixel(j, i, Color.FromArgb(0,0,0));}}}return bitImage;}执⾏结果如图:左边为处理前,右边为⼆值化后效果。
二值化的作用
二值化是图像处理中常用的一种方法,其作用是将灰度图像转换为二值图像,即将图像中的像素点根据其灰度值分成两类:黑色和白色。
这种处理方法可以帮助我们更清晰地识别图像中的目标,简化图像的复杂度,提高图像的处理速度和准确性。
二值化的作用主要有以下几个方面:
1. 增强图像对比度:通过将图像中的像素点分成黑白两类,可以明显地增强图像的对比度。
这样可以使图像中的目标更加清晰地呈现出来,便于我们进行进一步的分析和处理。
2. 分割目标物体:在某些图像处理任务中,我们需要将图像中的目标物体从背景中分割出来。
通过二值化处理,我们可以将目标物体和背景分成黑白两部分,从而更容易地实现目标物体的分割。
3. 提取特征信息:在一些图像识别和分类任务中,我们需要提取图像中的特征信息来进行分类或识别。
通过二值化处理,我们可以将图像中的特征信息提取出来,便于后续的特征提取和分类处理。
4. 去除噪声:在图像处理过程中,常常会受到各种噪声的干扰,影响图像的质量和准确性。
通过二值化处理,我们可以将噪声点去除掉,从而提高图像的清晰度和准确性。
总的来说,二值化在图像处理中起着非常重要的作用,可以帮助我
们更好地处理图像,提高图像处理的效率和准确性。
通过合理地运用二值化方法,我们可以更好地理解图像中的信息,实现更多的图像处理任务,为各行业带来更多的便利和发展机遇。
基于c#图像灰度化、灰度反转、⼆值化的实现⽅法详解本篇⽂章是对c#图像灰度化、灰度反转、⼆值化的实现⽅法进⾏了详细的分析介绍,需要的朋友参考下图像灰度化:将彩⾊图像转化成为灰度图像的过程成为图像的灰度化处理。
彩⾊图像中的每个像素的颜⾊有R、G、B三个分量决定,⽽每个分量有255中值可取,这样⼀个像素点可以有1600 多万(255*255*255)的颜⾊的变化范围。
⽽灰度图像是R、G、B三个分量相同的⼀种特殊的彩⾊图像,其⼀个像素点的变化范围为255种,所以在数字图像处理种⼀般先将各种格式的图像转变成灰度图像以使后续的图像的计算量变得少⼀些。
灰度图像的描述与彩⾊图像⼀样仍然反映了整幅图像的整体和局部的⾊度和亮度等级的分布和特征。
图像的灰度化处理可⽤两种⽅法来实现。
第⼀种⽅法使求出每个像素点的R、G、B三个分量的平均值,然后将这个平均值赋予给这个像素的三个分量。
第⼆种⽅法是根据YUV的颜⾊空间中,Y的分量的物理意义是点的亮度,由该值反映亮度等级,根据RGB和YUV颜⾊空间的变化关系可建⽴亮度Y与R、G、B三个颜⾊分量的对应:Y=0.3R+0.59G+0.11B,以这个亮度值表达图像的灰度值。
///<summary>///图像灰度化///</summary>///<param name="bmp"></param>///<returns></returns>public static Bitmap ToGray(Bitmap bmp){for (int i = 0; i < bmp.Width; i++){for (int j = 0; j < bmp.Height; j++){//获取该点的像素的RGB的颜⾊Color color = bmp.GetPixel(i, j);//利⽤公式计算灰度值int gray = (int)(color.R * 0.3 + color.G * 0.59 + color.B * 0.11);Color newColor = Color.FromArgb(gray, gray, gray);bmp.SetPixel(i, j, newColor);}}return bmp;}灰度反转:把每个像素点的R、G、B三个分量的值0的设为255,255的设为0。
灰度图像二值化方法研究摘要:在人类获取的信息中,视觉信息约占60%,听觉约占20%,其它约占20%。
由此可见,视觉信息对人类非常重要。
同时,图像是人类获取视觉信息的主要途径。
图像二值化是图像预处理中的一项重要技术,在模式识别、光学字符识别、医学成像等方面都有重要应用。
论文介绍了图像及数字图像处理技术的一些概念和相关知识;对Matlab7.0 软件的发展和软件在图像处理中的应用做了简要介绍;还介绍了灰度图像二值化方法以及利用Matlab7.0软件工具进行算法的实现。
课题重点实现了图像分割技术和边缘检测中灰度图像二值化方法,如Otsu算法、Bernsen算法,并对这些算法运行的实验结果进行分析与比较。
关键词:图像处理;边缘检测;二值化;Matlab;Otsu算法;Bernsen算法Gray image binarization methodAbstract:Human beings obtain a lot of information, among which the visual information is about 60%, the sense of hearing about 20%, and others about 20%. Therefore, the visual information is very important for human beings. Moreover, the images are the primary way, by which a lot of information is obtained. Image binarization, as an important technology in image pre-processing, is widely-employed in pattern recognition, optical character recognition, medical imaging and so forth. In this paper, some notions and relative knowledge in digital image processing technology are introduced; then, the development of Matlab7.0 and its application in image processing briefly introduced; in addition, the method of grayscale image binarization and how to implement these algorithms based on Matlab7.0 are presented. This paper mainly implements the grayscale image binarization method in image segmentation technology and Marginal Detection , such as Otsu algorithm and Bernsen algorithm, and analyzes and compares the experimental results of the above algorithms.Keywords:Image processing;Marginal Detection;Binarization, Matlab;Otsu algorithm;Bernsen algorithm目录1引言 (1)1.1 图像与数字图像 (1)1.2 灰度图像二值化原理及意义 (1)2 灰度图像二值化方法 (2)2.1 课题研究对象 (2)2.2 二值化方法研究动态 (3)3 软件工具——MATLAB进行算法的实现 (5)3.1 Matlab工具箱实现的常用功能 (5)3.2 Otsu算法(最大类问方差法) (7)3.3 Bernsen算法 (7)4 Otsu方法和Bernsen方法实验比较 (8)4.1 Otsu方法实验结果分析 (8)4.2 Bernsen方法结果分析 (10)4.3 0tsu方法和Bernsen方法实验结果比较 (11)4.4 结论 (12)5 结束语 (13)参考文献 (14)致谢.............................................. 错误!未定义书签。
附录:源代码. (16)1 引言1.1 图像与数字图像图像就是用各种观测系统观测客观世界获得的且可以直接或间接作用与人眼而产生视觉的实体。
视觉是人类从大自然中获取信息的最主要的手段。
拒统计,在人类获取的信息中,视觉信息约占60%,听觉信息约占20%,其他方式加起来才约占20%。
由此可见,视觉信息对人类非常重要。
同时,图像又是人类获取视觉信息的主要途径,是人类能体验的最重要、最丰富、信息量最大的信息源。
通常,客观事物在空间上都是三维的(3D)的,但是从客观景物获得的图像却是属于二维(2D)平面的。
图像存在方式多种多样,可以是可视的或者非可视的,抽象的或者实际的,适于计算机处理的和不适于计算机处理的。
但就其本质来说,可以将图像分为以下两大类。
模拟图像。
包括光学图像、照相图像、电视图像等。
比如人在显微镜下看到的图像就是一幅光学模拟图像。
对模拟图像的处理速度快,但精度和灵活性差,不易查找和判断。
数字图像。
数字图像是将连续的模拟图像经过离散化处理后得到的计算机能够辨识的点阵图像。
在严格意义上讲,数字图像是经过等距离矩形网格采样,对幅度进行等间隔量化的二维函数。
因此,数字图像实际上就是被量化的二维采样数组[4]。
1.2 灰度图像二值化原理及意义灰度图像是指只含亮度信息,不含色彩信息的图像。
将彩色图像转化成为灰度图像的过程称为图像的灰度化处理。
彩色图像中的每个像素的颜色有R、G、B 三个分量决定,而每个分量有255种值可取,这样一个像素点可以有1600多万的颜色的变化范围。
而灰度图像是R、G、B三个分量相同的一种特殊的彩色图像,一个像素点的变化范围为255种,所以在数字图像处理中一般先将各种格式的图像转变成灰度图像以使后续的图像的计算量变得少一些。
灰度图像的描述与彩色图像一样仍然反映了整幅图像的整体和局部的色度和亮度等级的分布和特征。
图像的灰度化处理可先求出每个像素点的R、G、B三个分量的平均值,然后将这个平均值赋予给这个像素的三个分量。
图像的二值化处理就是将图像上的点的灰度置为0或255,也就是使整个图像呈现出明显的黑白效果。
即将256个亮度等级的灰度图像通过适当的阀值选取而获得仍然可以反映图像整体和局部特征的二值化图像[6]。
在数字图像处理中,二值图像占有非常重要的地位,特别是在实用的图像处理中,以二值图像处理实现而构成的系统是很多的,要进行二值图像的处理与分析,首先要把灰度图像二值化,得到二值化图像,这样子有利于再对图像做进一步处理时,图像的集合性质只与像素的值为0或255的点的位置有关,不再涉及像素的多级值,使处理变得简单,而且数据的处理和压缩量小。
二值图像在图像分析中应用非常广泛,二值图像就是指只有两个灰度级的图像,二值图像具有存储空间小,处理速度快,可以方便地对图像进行布尔逻辑运算等特点。
更重要的是,在二值图像的基础上,还可以进一步对图像处理,获得该图像的一些几何特征或者其他更多特征[7]。
2 灰度图像二值化方法2.1 课题研究对象论文主要研究边缘检测物体的边缘是以图像局部特性的不连续性的形式出现的,如灰度值的突变,颜色的变化纹理结构的突变等。
图像的边缘信息在图像分析和人的视觉中都是十分重要的,是图像识别中提取图像特征的一个重要属性。
图像的边缘有方向和幅度两个特性。
通常,沿边缘走向的象素变化平缓,而垂直于边缘走向的象素变化剧烈。
这种变化可能呈现阶跃型、房顶型和凸缘型。
在边缘上灰度的一阶导数幅值较大,而二阶导数在边缘上的值为0 ,其左右分别为一正一负两个峰,也就是说,边缘点对应于一阶微分幅度大的点,也对应于二阶微分幅度的零交叉点。
因此,利用梯度最大值或二阶导数的过零点提取边缘就成为一种有力的手段。
常见的边缘检测算子有:1.中心差分算子2(,)(1,)(1,)x f i j f i j f i j =+--∆ (2.1-1)2(,)(,1)(,1)y f i j f i j f i j ∆=+-- (2.1-2)2.Robert s 算子(,)(1,1)(,)f i j f i j f i j +=++-∆ (2.1-3)(,)(,1)(1,)f i j f i j f i j -=+-+∆ (2.1-4)3.Prewitt 算子101101101x ⎛⎫ ⎪ ⎪ ⎪⎝⎭-∆-- 111000111y ⎛⎫ ⎪ ⎪ ⎪⎝⎭∆--- (2.1-5)4.Sobel 算子101202101x -⎛⎫ ⎪∆- ⎪ ⎪-⎝⎭ 121000121y ⎛⎫ ⎪∆ ⎪ ⎪---⎝⎭(2.1-6)还有一些其它算子,如Kirsh 算子、Robinson 算子、Laplacian 算子等。
图像阀值分割是一种广泛使用的图像分割技术,它利用图像中提取的目标物与背景在灰度特性上的差异,把图像视为具有不同灰度级的两类区域(目标和背景) 的组合,以确定图像中每一个象素点应该属于目标区域还是背景区域,从而产生相应的二值图像[2]。
2.2 二值化方法研究动态作为一种高效智能的人机交互手段,身份证的快速识别技术可以广泛的应用于公民身份核查、暂住人口调查、旅店业登记核查、罪犯追逃等公安业务当中,大大提高了工作人员的录入速度,减少了用户的等待时间,提高了工作效率。
由于身份证图像背景复杂,由激光防伪阴影网格线及各种版面噪声构成;且因激光防伪标志和打印条件的千差万别,再加上身份证图像质量偏差,给身份证的字符识别带来了很大的困难。
必须经过预处理,除去大量的噪声信号,才能更好的进行字符的定位、分割,以及识别。
而二值化是预处理中非常重要的一步,也是最为关键的一步,它直接影响到OCR 系统的性能。
研究者在分析和讨论了多种图像二值化的优缺点后,在吸取各种方法优点的基础上,提出了一种新的身份证扫描图像的二值化方法——嵌入式多阈值动态自适应的二值化方法。
图像二值化是图像处理中的一项基本技术,也是很多图像处理技术的预处理过程。
在颗粒分析、模式识别技术、光学字符识别(OCR)、医学数据可视化中的切片配准等应用中,图像二值化是它们进行数据预处理的重要技术。
由于图像二值化过程将会损失原图像的许多有用信息,因此在进行二值化预处理过程中,能否保留原图的主要特征非常关键。