图像二值化算法研究与实现
- 格式:doc
- 大小:1.56 MB
- 文档页数:17

c语言二值化算法C语言二值化算法引言:二值化是一种图像处理技术,将灰度图像转化为黑白图像,即将像素点的灰度值映射为0或255。
它在图像处理、计算机视觉、模式识别等领域有着广泛的应用。
本文将介绍C语言中常用的二值化算法及其实现原理。
一、二值化算法的原理二值化算法的核心思想是根据像素点的灰度值将其映射为黑或白两种颜色。
通常情况下,我们选择一个阈值,将灰度值大于阈值的像素点设为白色,小于等于阈值的像素点设为黑色。
这样就实现了图像的二值化。
二、全局阈值二值化算法全局阈值二值化算法是最简单、最常用的二值化算法之一。
其基本原理是通过计算图像的平均灰度值或者直方图,选择一个合适的阈值进行二值化。
具体步骤如下:1. 计算图像的平均灰度值或者直方图;2. 根据选择的阈值将像素点分为两类,大于阈值的设为白色,小于等于阈值的设为黑色;3. 将二值化后的图像输出。
三、自适应阈值二值化算法全局阈值二值化算法存在一个问题,即当图像的亮度不均匀时,选择一个固定的阈值就会导致一部分像素点被错误地分为黑色或白色。
为了解决这个问题,自适应阈值二值化算法被提出。
自适应阈值二值化算法的基本原理是根据图像的局部特征选择不同的阈值。
具体步骤如下:1. 将图像分割成若干个子区域;2. 对每个子区域计算一个局部阈值;3. 根据局部阈值将像素点分为两类,大于阈值的设为白色,小于等于阈值的设为黑色;4. 将二值化后的图像输出。
四、基于Otsu算法的二值化算法Otsu算法是一种自适应阈值二值化算法,其基本原理是通过最大类间方差来选择阈值。
具体步骤如下:1. 计算图像的灰度直方图;2. 遍历所有可能的阈值,计算每个阈值对应的类间方差;3. 选择使类间方差最大的阈值作为最终的二值化阈值;4. 根据阈值将像素点分为两类,大于阈值的设为白色,小于等于阈值的设为黑色;5. 将二值化后的图像输出。
五、C语言实现二值化算法的示例代码下面是一个使用C语言实现全局阈值二值化算法的示例代码:```c#include <stdio.h>void binaryzation(int threshold, int width, int height, unsigned char *input, unsigned char *output) {for (int i = 0; i < width * height; i++) {if (input[i] > threshold) {output[i] = 255;} else {output[i] = 0;}}}int main() {int threshold = 128; // 阈值int width = 640; // 图像宽度int height = 480; // 图像高度unsigned char input[width * height]; // 输入图像unsigned char output[width * height]; // 输出图像// 读取输入图像的灰度值// 调用二值化函数binaryzation(threshold, width, height, input, output);// 输出二值化后的图像return 0;}```六、总结本文介绍了C语言中常用的二值化算法及其实现原理。
图像二值化实验报告c篇一:数字图像处理实验报告数字图像处理实验报告班级:通信103学号:20xx27201姓名:计富威指导教师:孙洁实验一 MATLAB数字图像处理初步一、实验目的与要求1.熟悉及掌握在MATLAB中能够处理哪些格式图像。
2.熟练掌握在MATLAB中如何读取图像。
3.掌握如何利用MATLAB来获取图像的大小、颜色、高度、宽度等等相关信息。
4.掌握如何在MATLAB中按照指定要求存储一幅图像的方法。
5.图像间如何转化。
二、实验内容及步骤1.利用imread( )函数读取一幅图像,假设其名为”第一个.tif”,存入一个数组中;>>I=imread('第一个.tif');2.利用whos命令提取该读入图像”第一个.tif”的基本信息; >>whos I3.利用imshow()函数来显示这幅图像;>>imshow(I);第一个.tif4.利用imfinfo函数来获取图像文件的压缩,颜色等等其他的详细信息;>>imfinfo('第一个.tif');5.利用imwrite()函数来压缩这幅图象,将其保存为一幅压缩了像素的jpg文件,设为flower.jpg;语法:imwrite(原图像,新图像,‘quality’,q), q取0-100。
>>imwrite(I,'第一个.jpg','quality',50)6.同样利用imwrite()函数将最初读入的tif图象另存为一幅bmp图像,设为flower.bmp。
>>imwrite(I,'第一个.bmp');7.用imread()读入图像:Lenna256.jpg 和camemaman.jpg; >>b=imread('lena256.bmp');>>c=imread('cameraman.tif');8.用imfinfo()获取图像Lenna256.jpg和camemaman.jpg 的大小; >>imfinfo('lena256.bmp');>>imfinfo('cameraman.tif');9.用figure,imshow()分别将Lenna256.jpg和camemaman.jpg显示出来,观察两幅图像的质量。
二值化处理的原理及其应用一、什么是二值化处理二值化处理,也称为二值图像处理,指的是将一副灰度图像转化为只包含两种颜色的图像。
通常情况下,这两种颜色是黑色和白色,也可以是其他两种自定义颜色。
二、二值化处理的原理二值化处理的原理基于图像的灰度分布。
在灰度图像中,每个像素点的灰度值都是介于0(黑色)和255(白色)之间的一个数值。
二值化处理通过设定一个阈值将灰度图像的像素点分为两个类别:低于阈值的像素点被设置为0(黑色),高于阈值的像素点被设置为255(白色)。
常用的二值化处理算法有全局阈值算法、局部阈值算法和自适应阈值算法。
1. 全局阈值算法全局阈值算法是最简单的二值化算法之一。
它假设整个图像的前景和背景的灰度值之间存在一个明显的分界点,通过选取合适的阈值将图像二值化。
常见的全局阈值算法有基于固定阈值的大津算法、基于最大熵的最大类间方差法等。
这些算法通过计算像素灰度值的全局分布,选择一个合适的阈值,以实现二值化处理。
2. 局部阈值算法局部阈值算法考虑到图像不同区域的灰度分布不一致性,采用不同的阈值对图像进行分割。
常用的局部阈值算法有均值阈值法、中值阈值法等。
这些算法通过计算像素周围邻域的平均灰度值或中值,以确定每个像素的二值化阈值。
这样可以更好地适应图像中不同区域的灰度特征,提高二值化效果。
3. 自适应阈值算法自适应阈值算法是对全局阈值算法和局部阈值算法的一种改进。
它根据每个像素的局部特征,自适应地选择阈值。
常见的自适应阈值算法有基于局部均值的局部二值化算法、基于局部方差的局部二值化算法等。
这些算法通过考虑像素周围邻域的灰度统计特征,提高了对不同区域的灰度分布的适应能力。
三、二值化处理的应用二值化处理在图像处理和计算机视觉领域被广泛应用。
以下是几个常见的应用场景:1.文字识别:二值化处理可以将图像中的文字区域与背景区域分开,使得文字更容易提取和识别。
2.边缘检测:二值化处理可以将图像中的边缘区域提取出来,用于图像的边缘检测和轮廓分析。
数字图像处理中的二值化技术研究数字图像处理是指对数字化的图像进行各种算法处理,以改善图像质量、实现目标应用和进行图像分析等。
其中,二值化技术是数字图像处理中应用最为广泛的技术之一。
本文将从二值化的基本原理、常见算法、优化技术以及应用等方面进行综述。
一、二值化的基本原理二值化是将一幅灰度图像转换成只有两种颜色的图像,常见的是黑白二值图像。
它的目的是将灰度范围较大的图像转换为仅包含两种灰度值的图像,以便进行图像分析和处理。
二值化的基本原理就是根据一定的阈值将像素点的灰度值分为两类,一类是大于等于阈值的像素点,另一类是小于阈值的像素点。
然后将这两类像素点分别用黑色和白色进行表示,从而得到一幅二值图像。
二、常见的二值化算法1.全局阈值法全局阈值法也称为固定阈值法,是最简单、最基本的二值化算法之一。
它的原理是将整幅图像的灰度直方图进行分析,将图像中所有像素的灰度值设置为一个固定的阈值,一般取灰度直方图的平均值或中值。
然后对于灰度值大于等于该值的像素点置为白色,灰度值小于该值的像素点置为黑色。
但这种算法容易受到光照不均匀、噪声较多等因素的影响,产生误判。
2.手动阈值法手动阈值法是根据观察或经验设置阈值,也称为交互式的阈值法。
它适用于像素灰度值分布不均匀,且图像背景和目标差异大的情况。
3.自适应阈值法自适应阈值法是根据图像在局部区域内的灰度值特征进行划分,常见的有局部均值法和Otsu法。
局部均值法是将像素点周围一定大小的区域内的灰度值作为阈值,并将该像素点二值化。
这种算法可以对灰度分布不均匀、光照不均匀等情况适用。
Otsu法是利用图像中目标与背景之间灰度值分布的偏差,自适应地确定一个能够最大程度区分两个类别的阈值。
4.基于形态学的阈值法形态学阈值法基于二值图像形态学操作的方法,能够有效去除噪声和骨骼化等图像处理,并能够保留目标的边界。
它的核心思想是基于图像特征对阈值进行判断,通常是先对图像进行形态学膨胀操作,然后求出局部的最大值,作为阈值进行二值化操作。
基于二值化图像的车牌识别算法研究车牌识别是计算机视觉领域中的一个重要研究方向,其在交通管理、智能交通系统、安全监控等方面具有广泛的应用前景。
而基于二值化图像的车牌识别算法是车牌识别中的重要环节之一。
本文将对基于二值化图像的车牌识别算法进行研究,探讨其原理与实现方法。
首先,我们需要了解二值化图像的概念。
二值化是将图像从灰度或彩色图像转化为只包含两个像素值的图像的过程。
在车牌识别中,二值化可以将车牌区域与背景分离,便于后续的字符识别。
在实现二值化的过程中,常用的方法包括全局阈值法、自适应阈值法和基于颜色的二值化方法等。
全局阈值法是指通过设定一个阈值,将图像中所有像素值大于该阈值的像素置为白色,而将像素值小于阈值的像素置为黑色。
这种方法简单快速,但对于亮度变化较大的图像,其效果可能不理想。
为了克服全局阈值法的不足,自适应阈值法被提出。
自适应阈值法将图像分割为若干个小块,在每个小块内计算局部阈值,并将每个像素与其所在小块的局部阈值进行比较,从而实现二值化。
这种方法在处理亮度变化较大的图像时效果更好,但计算量较大。
基于颜色的二值化方法则是利用车牌的颜色特征进行二值化。
车牌通常具有固定的颜色,因此可以通过颜色阈值将车牌区域与背景区分开来。
这种方法对于不同颜色的车牌具有较好的适应性,但对于一些黑白车牌则可能不适用。
在得到二值化图像后,接下来是对图像进行车牌区域的定位。
车牌定位是车牌识别中的一个重要环节,其目的是将图像中的车牌区域准确地找出来。
常见的车牌定位方法包括颜色定位法、形状定位法和基于特征的定位法等。
其中,颜色定位法是通过颜色特征将车牌区域与背景区分开来。
这种方法需要先对图像进行颜色空间转换,然后根据车牌的颜色分布规律来进行车牌定位。
形状定位法则是通过车牌的形状特征来进行定位,例如通过匹配车牌边缘的形状信息来确定车牌区域。
基于特征的定位法则是通过分析车牌的特征,例如车牌字符的位置、字符间距等信息来进行定位。
数字图像处理中的二值化算法研究数字图像处理是一种将数字信号进行转换和处理的技术,其中二值化算法是数字图像处理中最基本的算法之一。
在数字图像处理中,二值化是将一张彩色或灰度图像转换成只包含黑白两种颜色的图像。
这篇文章将讨论数字图像处理中的二值化算法研究,重点探讨二值化算法的基本原理、常见的二值化算法以及它们的优缺点。
一、二值化算法的基本原理二值化算法是将一张彩色或灰度图像转换为只包含黑色和白色的图像。
这仅仅是将像素值分为两类,其中一个像素集合表示白色,另一个表示黑色。
二值化的原理是将灰度图像中亮度值相近的像素映射为同一种颜色,以达到压缩图像数据并提高图像处理速度的目的。
二、常见的二值化算法1、全局阈值法全局阈值法是通过计算整个图像的灰度平均值来确定二值化的阈值。
该算法简单易用,但它假定图像的背景和目标的亮度值之间存在一个确定的边界,这在实际应用中并不总是正确的。
2、自适应阈值法自适应阈值法是针对全局阈值法的不足,通过对每个像素周围的像素值的统计分布进行分析,自适应地确定像素的阈值。
该算法对于图像的光照变化和背景模糊有很好的鲁棒性。
3、Otsu算法Otsu算法是一种自适应的阈值算法,通过最小化类内方差和类间方差的和来确定阈值。
这个算法假设图像存在不同的颜色区域,旨在找到阈值,以最大化识别两个区域的差异。
三、二值化算法的优缺点1、全局阈值法的优点是简单易用,运算速度快,因此非常适合处理简单的图像。
但是,它不能很好地处理灰度变化较大的图像和背景复杂的图像。
2、自适应阈值法比全局阈值法更适用于处理复杂的图像,由于每个像素的阈值是基于周围像素的,具有更好的图像复杂性,然而,该算法对于图像的光照变化较大的情况也有一定的局限。
3、Otsu算法能够通过最小化类内方差和类间方差的和来确定阈值。
该算法对于事先未知的图像类型以及图像颜色区域的不均衡分布具有适应性和鲁棒性,是一种广泛应用于图像二值化中的方法。
四、二值化算法的应用二值化算法在字符识别、边缘检测等领域中有着广泛的应用。
niblack二值化分割算法详解Niblack二值化分割算法是一种常用的图像处理算法,用于将灰度图像转化为二值图像。
该算法基于局部阈值的概念,通过计算每个像素点周围区域的灰度均值和标准差,来确定该像素点的阈值,从而实现图像的分割。
Niblack算法的核心思想是将图像分为多个小的局部区域,然后计算每个区域的灰度均值和标准差。
根据这些统计值,可以得到每个像素点的阈值。
具体的计算公式如下:T(x, y) = μ(x, y) + k * σ(x, y)其中,T(x, y)表示像素点(x, y)的阈值,μ(x, y)表示像素点(x, y)周围区域的灰度均值,σ(x, y)表示像素点(x, y)周围区域的灰度标准差,k是一个可调节的参数,用于控制阈值的灵敏度。
在实际应用中,通常将图像分为多个大小相等的小区域,然后计算每个区域的灰度均值和标准差。
根据计算得到的阈值,将图像中的像素点进行二值化处理,即将灰度值大于阈值的像素点设为白色,灰度值小于等于阈值的像素点设为黑色。
Niblack算法的优点是简单易懂,计算速度快,适用于各种类型的图像。
然而,由于该算法是基于局部阈值的计算,对于光照不均匀或者噪声较多的图像,可能会产生较大的误差。
因此,在实际应用中,可以根据具体情况选择合适的参数值,或者结合其他图像处理算法进行优化。
除了Niblack算法,还有一些其他常用的二值化分割算法,如Sauvola算法、Otsu算法等。
这些算法在具体实现上有所不同,但基本思想都是通过计算像素点周围区域的统计值来确定阈值,从而实现图像的分割。
总之,Niblack二值化分割算法是一种简单有效的图像处理算法,可以将灰度图像转化为二值图像。
通过计算每个像素点周围区域的灰度均值和标准差,来确定该像素点的阈值,从而实现图像的分割。
在实际应用中,可以根据具体情况选择合适的参数值,或者结合其他图像处理算法进行优化,以达到更好的分割效果。
sauvola⼆值化算法研究⼆值化算法研究sauvola是⼀种考虑局部均值亮度的图像⼆值化⽅法, 以局部均值为基准在根据标准差做些微调.算法实现上⼀般⽤积分图⽅法来实现.这个⽅法能很好的解决全局阈值⽅法的短板—关照不均图像⼆值化不好的问题.先贴代码//************************************// 函数名称: sauvola// 函数说明: 局部均值⼆值化// 参数:// const unsigned char * grayImage [in] 输⼊图像数据// const unsigned char * biImage [out] 输出图像数据// const int w [in] 输⼊输出图像数据宽// const int h [in] 输⼊输出图像数据⾼// const int k [in]// const int windowSize [in] 处理区域宽⾼// 返回值: void//************************************void sauvola(const unsigned char* grayImage,const unsigned char* biImage,const int w,const int h,const int k,const int windowSize){int whalf = windowSize >>1;int i, j;int IMAGE_WIDTH = w;int IMAGE_HEIGHT = h;// create the integral imageunsigned long* integralImg =(unsigned long*)malloc(IMAGE_WIDTH*IMAGE_HEIGHT*sizeof(unsigned long*));unsigned long* integralImgSqrt =(unsigned long*)malloc(IMAGE_WIDTH*IMAGE_HEIGHT*sizeof(unsigned long*));int sum =0;int sqrtsum =0;int index;//收集数据 integralImg像素和积分图 integralImgSqrt像素平⽅和积分图for(i =0; i < IMAGE_HEIGHT; i++){// reset this column sumsum =0;sqrtsum =0;for(j =0; j < IMAGE_WIDTH; j++){index = i*IMAGE_WIDTH + j;sum += grayImage[index];sqrtsum += grayImage[index]* grayImage[index];if(i ==0){integralImg[index]= sum;integralImgSqrt[index]= sqrtsum;}else{integralImgSqrt[index]= integralImgSqrt[(i -1)*IMAGE_WIDTH + j]+ sqrtsum;integralImg[index]= integralImg[(i -1)*IMAGE_WIDTH + j]+ sum;}}}//Calculate the mean and standard deviation using the integral imageint xmin, ymin, xmax, ymax;double mean, std, threshold;double diagsum, idiagsum, diff, sqdiagsum, sqidiagsum, sqdiff, area;for(i =0; i < IMAGE_WIDTH; i++){for(j =0; j < IMAGE_HEIGHT; j++){xmin = max(0, i - whalf);ymin = max(0, j - whalf);xmax = min(IMAGE_WIDTH -1, i + whalf);ymax = min(IMAGE_HEIGHT -1, j + whalf);area =(xmax - xmin +1)*(ymax - ymin +1);if(area <=0){biImage[i * IMAGE_WIDTH + j]=255;continue;}if(xmin ==0&& ymin ==0){diff = integralImg[ymax * IMAGE_WIDTH + xmax];sqdiff = integralImgSqrt[ymax * IMAGE_WIDTH + xmax];}else if(xmin >0&& ymin ==0){diff = integralImg[ymax * IMAGE_WIDTH + xmax]- integralImg[ymax * IMAGE_WIDTH + xmin -1];sqdiff = integralImgSqrt[ymax * IMAGE_WIDTH + xmax]- integralImgSqrt[ymax * IMAGE_WIDTH + xmin -1];}else if(xmin ==0&& ymin >0){diff = integralImg[ymax * IMAGE_WIDTH + xmax]- integralImg[(ymin -1)* IMAGE_WIDTH + xmax];sqdiff = integralImgSqrt[ymax * IMAGE_WIDTH + xmax]- integralImgSqrt[(ymin -1)* IMAGE_WIDTH + xmax];;}else{diagsum = integralImg[ymax * IMAGE_WIDTH + xmax]+ integralImg[(ymin -1)* IMAGE_WIDTH + xmin -1];idiagsum = integralImg[(ymin -1)* IMAGE_WIDTH + xmax]+ integralImg[ymax * IMAGE_WIDTH + xmin -1];diff = diagsum - idiagsum;sqdiagsum = integralImgSqrt[ymax * IMAGE_WIDTH + xmax]+ integralImgSqrt[(ymin -1)* IMAGE_WIDTH + xmin -1];sqidiagsum = integralImgSqrt[(ymin -1)* IMAGE_WIDTH + xmax]+ integralImgSqrt[ymax * IMAGE_WIDTH + xmin -1];sqdiff = sqdiagsum - sqidiagsum;}}mean = diff / area;=((sqdiff - diff*diff / area)/(area -1));threshold = mean*(1+ k*((std /128)-1));if(grayImage[j*IMAGE_WIDTH + i]< threshold)biImage[j*IMAGE_WIDTH + i]=0;elsebiImage[j*IMAGE_WIDTH + i]=255;}}free(integralImg);free(integralImgSqrt);}代码要注意下⾯⼏点:1 计算区域像素和,⼏乎使⽤积分图技术是必然的选择.2 标准差的表⽰⽅法: std = sqrt((sqdiff - diff*diff / area)/(area -1)) 终于感到⾼等代数没有⽩学,可以看百度百科关于⽅差的说明3 判定⽅程 threshold = mean*(1 + k*((std / 128) - 1)). ⾸先均值是基础, 如果标准差⼤写,阈值就会⼤些,标准差⼩些,阈值就会⼩些.这个⽅法对⼀些不是光照不均的图⽚有时候效果不好,现在还在找较好的⽅法,初步打算先⽤全局均值做⼆值化,如何效果不好再⽤局部均值的⽅法. ----为什么我的博客没⼈看啊……………………………………。
图像处理中的图像二值化算法随着科技的发展,图像处理技术应用越来越广泛。
作为一项基础技术,图像二值化算法在图像处理中扮演着非常关键的角色,它可以将图像分割成黑白两种颜色,也就是将图像中的灰度值转化为0和1,简化了后续的处理流程。
本文将介绍图像二值化算法的基本原理和应用情况。
一、二值化算法的基本原理在图像中,每个像素都有一定的灰度值,在8位灰度图像中,灰度值的范围在0-255之间,其中0是代表黑色,255代表白色。
当我们需要处理一张图片时,如果直接对每一个灰度值进行处理,那么处理的过程就会非常繁琐,因此,我们需要将图像灰度值转化为0和1两种数字进行处理。
常见的二值化算法有全局阈值算法、局部阈值算法、自适应阈值算法、基于梯度算法等。
其中,全局阈值算法是最基本、最简单的一种算法。
它将整张图像分成黑白两个部分,通过将整个图像的像素点的灰度值与一个固定的阈值进行比较,如果像素点的灰度值大于阈值,就将该像素点的灰度值置为1,否则置为0。
使用全局二值化算法的步骤如下:1.将图像读入到内存中;2.将图像转化为灰度图像;3.计算整个图像的平均灰度值,该平均灰度值作为全局阈值;4.将图像中每个像素点的灰度值与该全局阈值进行比较,灰度值大于等于该全局阈值的像素点赋值为255(代表白色),小于该阈值的像素点赋值为0(代表黑色);5.输出处理后的图像。
当然,这种方法的缺点也非常明显,那就是无法适应不同场合下的图像处理需求,处理效果难以保证。
因此,我们需要更为灵活的算法和方法来进行二值化处理。
二、不同类型的二值化算法1.基于直方图的全局阈值法二值化算法中的全局阈值算法通常是将整个图像分成两类像素:一类像素比较暗,另一类像素比较亮。
在直方图中,该分割就是直方图上的两个峰。
我们可以通过直方图分析来确定这个阈值,并将灰度值低于阈值的像素变为黑色,将灰度值高于阈值的像素变为白色。
对于图像I(x,y),它的灰度直方图h(i)可以表示为:h(i) = N(i) / MN (i=0,1,…,L-1)其中N(i)是图像中所有像素灰度值为i的像素数量,MN是总的像素数量,L是灰度级别数量(在8位图像中,L等于256)然后我们需要确定一个阈值T,所有像素点的灰度值小于T的变为黑色,大于等于T的变为白色。
图像二值化算法研究与实现摘要:图像二值化是图像预处理中的一项重要技术,在模式识别、光学字符识别、医学成像等方面都有重要应用。
论文介绍了图像及数字图像处理技术的一些概念和相关知识;对VC++ 软件的发展和软件在图像处理中的应用做了简要介绍;还介绍了图像二值化算法以及利用VC++软件工具进行算法的实现。
论文重点实现了图像分割技术中常用灰度图像二值化算法,如Otsu算法、Bernsen算法,并对这些算法运行的实验结果进行分析与比较。
关键词:图像处理;二值化;VC++;1.引言1.1 图像与数字图像图像就是用各种观测系统观测客观世界获得的且可以直接或间接作用与人眼而产生视觉的实体。
视觉是人类从大自然中获取信息的最主要的手段。
拒统计,在人类获取的信息中,视觉信息约占60%,听觉信息约占20%,其他方式加起来才约占20%。
由此可见,视觉信息对人类非常重要。
同时,图像又是人类获取视觉信息的主要途径,是人类能体验的最重要、最丰富、信息量最大的信息源。
通常,客观事物在空间上都是三维的(3D)的,但是从客观景物获得的图像却是属于二维(2D)平面的。
数字图像:数字图像是将连续的模拟图像经过离散化处理后得到的计算机能够辨识的点阵图像。
在严格意义上讲,数字图像是经过等距离矩形网格采样,对幅度进行等间隔量化的二维函数。
因此,数字图像实际上就是被量化的二维采样数组。
1.2 数字图像处理技术内容与发展现状数字图像处理就是采用一定的算法对数字图像进行处理,以获得人眼视觉或者某种接受系统所需要的图像处理过程。
图像处理的基础是数字,主要任务是进行各种算法设计和算法实现。
图像处理技术的发展大致经历了初创期、发展期、普及期和实用化期4个阶段。
初创期开始与20世纪60年代,当时的图像采用像素型光栅进行少秒显示,大多采用中、大型机对其处理。
在这一时期,由于图像存储成本高、处理设备昂贵,其应用面很窄。
进入20世纪70年代的发展期,开始大量采用中、小型机进行处理,图像处理也逐渐改用光栅扫描方式,特别是CT和卫星遥感图像的出现,对图像处理技术的发展起到了很好的推动作用。
到了20世纪80年代,图像处理技术进入普及期,此时的微机已经能够担当起图形图像处理的任务。
超大规模集成电路(Very Large Scale Integration, VLSI)的出现更使处理速度大大提高,设备造价也进一步降低,极大地促进了图形图像系统的普及和应用。
20世纪90年代是图像处理技术的实用化时期,图像处理的信息量巨大,对处理速度的要求极高。
1.3 图像二值化原理及意义图像二值化是指用灰度变换来研究灰度图像的一种常用方法,即设定某一阈值将灰度图像的像素分成大于阈值的像素群和小于阈值的像素群两部分。
例如输人灰度图像函数为),(y x f ,输出二值图像函数为),(y x g ,则⎩⎨⎧≥<=Thresholdy x f Thresholdy x f y x g ) ,( 255),( 0) , ( (1) 阈值(threshold )是把目标和背景区分开的标尺,选取适当的阈值就是既要尽可能保存图像信息,又要尽可能减少背景和噪声的干扰,这是选择阈值的原则。
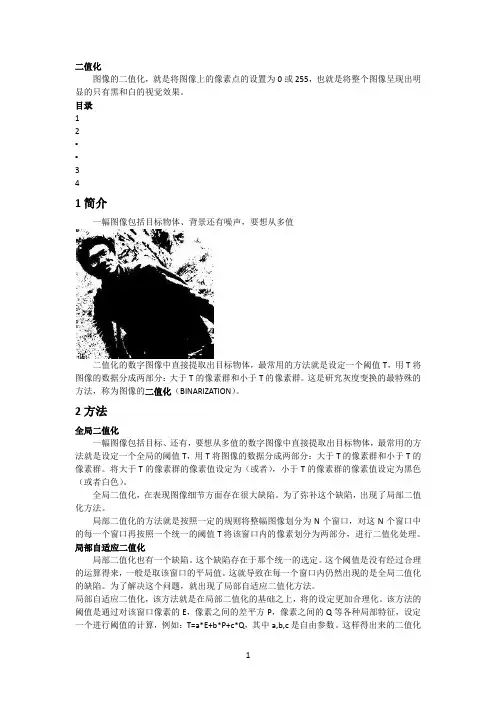
图像的二值化处理就是将图像上的点的灰度置为0或255,也就是使整个图像呈现出明显的黑白效果。
即将256个亮度等级的灰度图像通过适当的阈值选取而获得仍然可以反映图像整体和局部特征的二值化图像。
在数字图像处理中,二值图像占有非常重要的地位,特别是在实用的图像处理中,以二值图像处理实现而构成的系统是很多的,要进行二值图像的处理与分析,首先要把灰度图像二值化,得到二值化图像,这样子有利于再对图像做进一步处理时,图像的集合性质只与像素的值为0或255的点的位置有关,不再涉及像素的多级值,使处理变得简单,而且数据的处理和压缩量小。
二值图像在图像分析中应用非常广泛,二值图像就是指只有两个灰度级的图像,二值图像具有存储空间小,处理速度快,可以方便地对图像进行布尔逻辑运算等特点。
更重要的是,在二值图像的基础上,还可以进一步对图像处理,获得该图像的一些几何特征或者其他更多特征。
2. 软件工具—VC++ 2.1 软件概述Microsoft Visual C++是 Microsoft 公司推出的开发Win32环境程序,面向对象的可视化集成编程系统。
它不但具有程序框架自动生成、灵活方便的类管理、代码编写和界面设计集成交互操作、可开发多种程序等优点,而且通过简单的设置就可使其生成的程序框架支持数据库接口、OLE2、WinSock 网络、控制界面。
它以拥有“语法高亮”,IntelliSense (自动编译功能)以及高级除错功能而著称。
比如,它允许用户进行远程调试,单步执行等。
还有允许用户在调试期间重新编译被修改的代码,而不必重新启动正在调试的程序。
其编译及建置系统以预编译头文件、最小重建功能及累加连结著称。
这些特征明显缩短程式编辑、编译及连结的时间花费,在大型软件计划上尤其显著。
VC++由C++语言 、MFC 的封装类、IDE 构成。
MFC (microsoft foundation classes, 微软基础类库)是微软为Windows 程序员提供的一个面向对象的Windows 编程接口,它大大简化了Windows 编程工作。
• MFC 提供了一个标准化的结构• 提供了大量的代码,指导用户编程时实现某些技术和功能。
VC 在单个工具中,能完成如下功能,因此被称为IDE(Integreted Development Enviroment, 集成开发环境):• 生成不同编写代码的起始应用程序 • 通过许多不同方法查看项目文件 • 编辑源文件和包含文件 • 建立应用程序的可视界面 • 编译及链接• 运行及调试应用程序 2.2 VC++开发环境Visual C++的集成开发环境Visual Studio 提供了大量的实用工具以支持可视化编程特性,它们包括: 项目工作区、ClassWizard 、AppWizard 、WizardBar 等。
下面对它们作逐一介绍。
Visual C++的用户界面如图1所示。
图1 Visual C++的用户界面图1 Visual C++的用户界面 2.2.1 项目工作区Visual C++使用项目工作区来组织项目、元素以及项目信息在屏幕上出现的方式。
在桌面上,工作区以窗口方式组织项目、文件和项目设置。
每个项目视图都有一个相应的文件夹,包含了关于该项目的各种元素。
展开该文件夹可以显示该视图方式下工作区的详细信息。
项目视图区包含三个选项卡,单击各选项卡,可以在其间切换。
这三个选项卡从左到右依次是:ClassView 、ResourceView 、FileView 。
(1) ClassView(类视图)显示项目中定义的C++类,展开文件夹显示工程中所定义的所有类,展开类可查看类的数据成员和成员函数以及全局变量、函数和类型定义。
ClassView 显示所有已定义的类以及这些类中的数据成员、成员变量。
(2) ResourceView(资源视图)显示项目中所包含的资源文件。
展开文件夹可显示所有的资源类型,如图3。
图2 类视图 图3 资源视图(3) FileView(文件视图)显示所创建的工程。
展开文件夹可以查看工程中所包含的文件,如图4。
向导栏 菜单条 工具条 项目工作区调试区 工作区图4 文件视图2.2.2 向导栏图5 向导栏WizardBar会自动跟踪用户程序的上下文——比如,当文本编辑器中的光标从一个函数移动到另一个函数时,Wizard的显示会自动更新。
WizardBar工具条包含了三个相关的下拉列表框:类(Class)、过滤器(Filter)和成员(Member)WizardBar最右边是一个Action Control下拉选项,单击Action Control 的向下箭头符号会弹出一个菜单,用于执行跳到函数定义、增加消息处理函数等操作。
3. 图像二值化的算法及实现3.1 论文研究对象论文主要研究BMP格式的灰度图像文件。
BMP(Bitmap Picture)文件格式是Windows 系统交换图形、图像数据的一种标准格式。
BMP图像的数据由四个部分组成,如表1所示。
表1 BMP图像文件结构文件部分属性说明BITMAPFILEHEADER (位图文件头) bfType文件类型,必须是0x424D,即字符串“BM”bfSize 指定文件大小,包括这14个字节bfReservered1 保留字,不用考虑bfReservered2 保留字,不用考虑bfOffBits从文件头到实际位图数据的偏移字节数BITMAPINFOHEADER (位图信息头) biSize 该结构长度,为40biWidth 图像的宽度,单位是像素biHeight 图像的高度,单位是像素biplanes 位平面数,必须是1,不用考虑biBitCount指定颜色位数,1为二值,4为16色,8为256色,16,24、32为真彩色biCompression指定是否压缩,有效的值为BI_RGB,BI_RLE8,BI_RLE4,BI_BITFIELDStypedef struct tagBITMAPFILEHEADER {WORD bfType;DWORD bfSize;WORD bfReserved1;WORD bfReserved2;DWORD bfOffBits;} BITMAPFILEHEADER;这个结构的长度是固定的,为14个字节(WORD为无符号16位二进制整数,DWORD为无符号32位二进制整数)。
第二部分为位图信息头BITMAPINFOHEADER,也是一个结构,其定义如下:typedef struct tagBITMAPINFOHEADER {DWORD biSize;LONG biWidth;LONG biHeight;WORD biPlanes;WORD biBitCount;DWORD biCompression;DWORD biSizeImage;LONG biXPelsPerMeter;LONG biYPelsPerMeter;DWORD biClrUsed;DWORD biClrImportant;} BITMAPINFOHEADER;这个结构的长度是固定的,为40个字节(LONG为32位二进制整数)。
其中,biCompression的有效值为BI_RGB、BI_RLE8、BI_RLE4、BI_BITFIELDS,这都是一些Windows 定义好的常量。
由于RLE4和RLE8的压缩格式用的不多,一般仅讨论biCompression的有效值为BI_RGB,即不压缩的情况。
第三部分为调色板(Palette),当然,这里是对那些需要调色板的位图文件而言的。