两级行星减速器动力学特性研究
- 格式:docx
- 大小:14.15 KB
- 文档页数:10
RV减速器传动系统动力学分析与试验研究张圆东肖正明吴利荣(昆明理工大学机电工程学院)摘要以RV320E减速器为研究对象,利用集中参数法对系统建立扭转动力学方程,在建立模型过程中考虑第1级减速器齿轮时变啮合刚度等因素的影响,运用数值方法求解振动传动系统的固有特性和动态响应,并通过试验方法与理论值进行比较,验证模型的正确性"试验结果表明:动力学模型仿真结果与理论数据吻合良好,并且建立的模型精细化程度高,为传动系统的结构设计、故障诊断与动力学优化奠定基础。
关键词RV减速器扭转动力学方程固有特性中图分类号TH132.46文献标识码A符号说明!——单齿变形区的宽度,!=12mm;"gm——摆线轮1与曲柄轴阻尼系数;"'25——摆线轮2与曲柄轴阻尼系数;——摆线轮1与太阳轮阻尼系数;"&'2+—摆线轮2与太阳轮阻尼系数;"pg——行星轮1与曲柄轴阻尼系数;"h-2®——行星轮2与曲柄轴阻尼系数;"h-3®——行星轮3与曲柄轴阻尼系数;——行星轮与太阳轮阻尼系数;",+——输入轴与太阳轮阻尼系数;"——输出轴阻尼系数;——曲柄轴与摆线轮啮合处的阻尼系数;E——摆线轮与针齿的弹性模量,本项目RV减速器为RV320E,针齿和摆线轮的材料一样,均为GCr15"故E=2.06x105MPa;%i——输入端等价啮合力;%——摆线轮与针齿的啮合力;F%'——摆线轮在特定位置的最大啮合力;%——输出端等价啮合力;——平均啮合刚度;——齿轮刚度谐波项;'(()——时变啮合刚度;----摆线轮单齿啮合刚度;----双齿啮合刚度;动态响应文章编号(000".?.:%:"!])0(-0040-09 'm2-----单齿啮合刚度;K----啮合刚度;——短幅系数;K(()——系统时变啮合刚度;Kb'g——摆线轮1与曲柄轴刚度系数;K bx2qj——摆线轮2与曲柄轴刚度系数;Kg——摆线轮1与太阳轮刚度系数;)'2+——摆线轮2与太阳轮刚度系数;K hp1——行星轮1刚度系数;K,p2——行星轮2刚度系数;K,P3——行星轮3刚度系数;K hp1qj——行星轮1与曲柄轴刚度系数;K hp2)i——行星轮2与曲柄轴刚度系数;K hp3qj——行星轮3与曲柄轴刚度系数;Kh-qj——行星轮与曲柄轴刚度系数;K hps——行星轮与太阳轮刚度系数;K,+——输入轴与太阳轮刚度系数;K/=——摆线轮与针齿时变啮合刚度;K——输出轴刚度系数;Kqj&'——曲柄轴与摆线轮啮合处的刚度系数;*----中心距;+----啮合轮齿个数的最大值;,----质量矩阵;----输入端的当量质量;——摆线轮1的当量质量;!b%2——摆线轮2的当量质量;!hpL—行星轮1的当量质量;!hp2——行星轮2的当量质量;—!行星轮3的当量质量;!*一一输出端的当量质量;—太阳轮的当量质量;"—一啮合轮齿个数;n——啮合轮齿个数的最小值;#——啮合总个数;$c------—摆线轮的有效半径;厂hp―一行星轮的有效半径#$hp=5mm;%——啮合线长度;&-—摆线轮上的位移;'—!啮合时间;T——添加在摆线轮上的扭矩;)—一振动加速度;咒#—一输入轴振动加速度;兀b%#—!摆线轮1的振动加速度;兀b%2—!摆线轮2的振动加速度;兀h p1—!行星轮1的振动加速度;兀h p2—!行星轮2的振动加速度;兀h p3—!行星轮3的振动加速度;)*!输出轴振动加速度;兀+—!太阳轮的振动加速度;*—!振动位移;^bxlqj—摆线轮1与曲柄轴相对振动位移;*bx2qj—摆线轮2与曲柄轴相对振动位移;*hp1一—行星轮1振动位移;*hp2一!行星轮2振动位移;*hp3一!行星轮3振动位移;^hplqj!行星轮1与曲柄轴相对振动位移;*hp2qj!行星轮2与曲柄轴相对振动位移;*hp3qj!行星轮3与曲柄轴相对振动位移;—hp+!行星轮与太阳轮相对振动位移;X*——!输出轴振动位移;*+—!太阳轮振动位移;+p—一啮合齿宽;!----!角速度;——第,阶固有圆频率;"—齿轮刚度谐波相位;#——重合度;$---摆线轮的泊松比,“=0.3;%町一摆线轮的接触变形(最大应力处);!(&),—单齿啮合间隙;&——摆线轮与针齿啮合间隙;'---初始相位角;(—啮合角;----各构件相应的第,阶振型矢量。
二级行星减速器传动比计算公式【文章标题】:探索二级行星减速器传动比计算公式的价值和应用【导语】:二级行星减速器是机械传动领域中常用的一种高精度、大扭矩传动装置。
在众多应用领域,如工业机械、汽车工程、航空航天等,二级行星减速器起到了至关重要的作用。
在设计和制造过程中,一个基本的问题就是如何准确计算得到合适的减速比。
本文将探索二级行星减速器传动比计算公式的价值和应用,并从深度和广度的角度,帮助读者全面理解这一概念。
【正文】:一、简介二级行星减速器二级行星减速器,又称为行星齿轮减速器,是由一个太阳轮、多个行星轮和一个内齿轮环组成的传动装置。
其中,太阳轮是输入轴,内齿轮环是输出轴。
行星轮通过行星架与太阳轮和内齿轮环相连,并通过轴承支撑。
二级行星减速器具有很高的传动效率、刚性和扭矩密度,因此在机械传动系统中得到广泛应用。
它的主要优点包括:承载能力强、传动平稳、可靠性高、体积小、重量轻等。
但在进行设计和制造之前,我们需要准确计算出合适的传动比。
二、二级行星减速器传动比计算公式的基本原理二级行星减速器的传动比是指输入轴转速与输出轴转速之间的比值。
通过传动比的选择,我们能够实现对输出轴速度和扭矩的控制,满足特定的需求。
为了准确计算传动比,我们需要考虑以下几个因素:1. 行星轮齿数:行星齿轮是二级行星减速器中最重要的组成部分之一,它直接影响到传动比的计算。
行星轮齿数的选择需要根据具体应用需求进行,一般而言,行星轮齿数越多,减速效果越明显。
在传动比计算中,行星轮齿数一般作为一个重要的参数参与计算公式的推导。
2. 太阳轮齿数:太阳轮是输入轴,其齿数与输入轴的转速直接相关。
太阳轮齿数的选择应考虑到输入功率、转速等因素,以确保传动效果和传动稳定性。
在计算传动比时,太阳轮齿数同样是不可忽视的因素。
3. 内齿轮环齿数:内齿轮环是输出轴,输出轴转速与内齿轮环齿数有直接关系。
内齿轮环齿数的选择需要结合输出转速要求进行,以满足系统的输出需求。
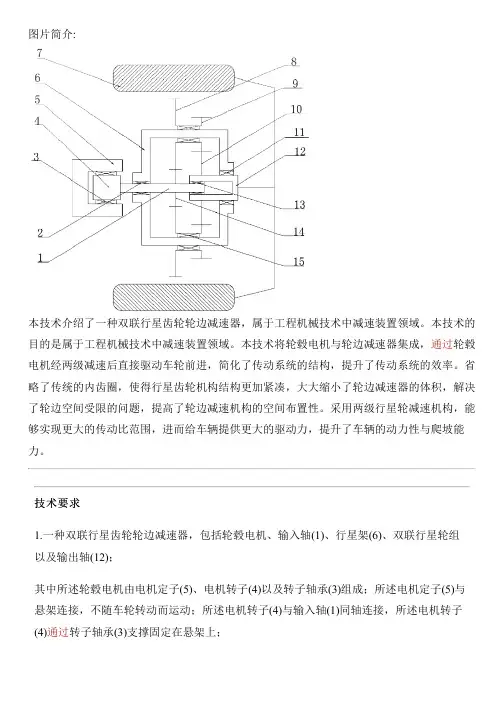
图片简介:本技术介绍了一种双联行星齿轮轮边减速器,属于工程机械技术中减速装置领域。
本技术的目的是属于工程机械技术中减速装置领域。
本技术将轮毂电机与轮边减速器集成,通过轮毂电机经两级减速后直接驱动车轮前进,简化了传动系统的结构,提升了传动系统的效率。
省略了传统的内齿圈,使得行星齿轮机构结构更加紧凑,大大缩小了轮边减速器的体积,解决了轮边空间受限的问题,提高了轮边减速机构的空间布置性。
采用两级行星轮减速机构,能够实现更大的传动比范围,进而给车辆提供更大的驱动力,提升了车辆的动力性与爬坡能力。
技术要求1.一种双联行星齿轮轮边减速器,包括轮毂电机、输入轴(1)、行星架(6)、双联行星轮组以及输出轴(12);其中所述轮毂电机由电机定子(5)、电机转子(4)以及转子轴承(3)组成;所述电机定子(5)与悬架连接,不随车轮转动而运动;所述电机转子(4)与输入轴(1)同轴连接,所述电机转子(4)通过转子轴承(3)支撑固定在悬架上;输出轴(12)空套在输入轴(1)上,并通过输出轴滚针轴承(13)径向支撑在输入轴(1)上;所述输出轴(12)可相对于所述输入轴(1)自由转动,所述输出轴(12)与车轮轮辋连接,可将动力输出给车轮;所述行星架(6)一侧空套在输入轴(1)并通过行星架滚针轴承(2)径向支撑在输入轴(1)上,另一侧空套在输出轴(12)通过行星架滚针轴承(11)径向支撑在输出轴(12)上,所述第一太阳轮(14)与输入轴(1)固连,输入轴(1)作为第一太阳轮(14)的齿轮轴;所述第二太阳轮(10)与输出轴(12)固连,输出轴(12)作为第二太阳轮(10)的齿轮轴;所述第一行星轮(8)与第二行星轮(9)连为一体,二者共同空套在行星架(5)上,通过行星架滚针轴承(15)径向支撑在行星架(6)上;所述第一太阳轮(14)与所述第一行星轮(8)啮合,所述第二太阳轮(10)与所述第二行星轮(9)啮合,其中第一太阳轮(14)和第二行星轮(9)为主动齿轮,第一行星轮(8)和第二太阳轮(10)为从动齿轮。
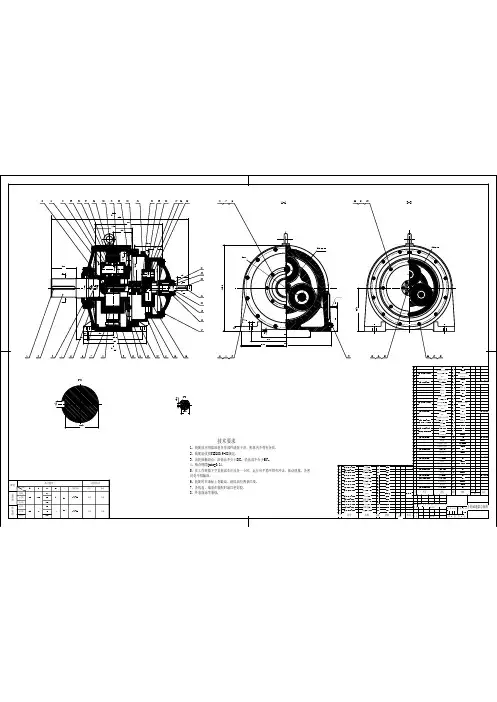
42CrMo 技术要求1、装配前应用煤油将各零部件清洗干净,机体内不得有杂质。
2、装配验收按YZB100.9-88规定。
3、齿轮接触斑点:沿齿长不少于80%,沿齿高不少于60%。
4、啮合侧隙jmin=0.14。
5、在工作转数下空负荷试车正反各一小时,运行应平稳不得有冲击、振动现象,各密封处不得漏油。
6、装配时在油标上划最高、最低油位两条红线。
7、各机盖、端盖在装配时涂以密封胶。
8、外表面涂苹果绿.Ø60r 6300130228170337.5443.5811163630050653.5137750Ø65k 6Ø220H 7r 6Ø300k 6Ø100k 6Ø60k 62222Ø260k 6Ø400H 7Ø120H 7Ø900H 7Ø560H 7Ø845H 7Ø800H 7400-0.0622000-0.2R321H7/m65200-0.52058084010804-Ø4660540.01035.5R51028620油位刻度线R432.5H7/m6序号名称代号数量材料单件总计重量备注43444546474849505152535455565758键40×280145输出轴1输出轴透盖1HT200GB/T1096-2003键40×180145轴承60521Ø260×Ø400×65GB/T 276-1994GB/T 1096-2003后机盖1HT200键50×160145GB/T1096-2003低速级行星架1ZG40CrMn 低速级内齿轮1后机体1HT200轴承160601Ø300×Ø460×50GB/T 276-1994前机体1HT200键16×80145GB/T1096-2003高速级内齿轮11ZG40CrMn 高速级行星架1HT200前机盖轴承6213245Ø65×Ø120×23GB/T 276-19941HT200输入轴透盖序号代号名称数量材料重量单件总计备注123456789101112131415161718192021222324252627282930313233343536373839404142毡圈1201JB12Q 4606-1986键16×100145GB/T1096-2003142CrMo 输入轴挡圈65165Mn GB/T 894.1-1986轴套65×74×1001铜合金GB/T 2509-1981高速级行星轮轴142CrMo 套筒6铜合金轴承NF2126454545Ø60×Ø110×22GB/T 283-1994套筒铜合金3高速级行星轮3GB/T 119.1-2000圆柱销Ø8×503奥氏体不锈钢通气器M27×1.5145齿轮联轴器1球顶445太阳轮142CrMo 42CrMo 42CrMo 42CrMo 42CrMo 套筒3铜合金吊环145645轴承NF220Ø100×Ø180×34GB/T 283-1994低速级行星轮342CrMo 套筒铜合金6GB/T 119.1-2000奥氏体不锈钢3圆柱销Ø12×60142CrMo 低速级行星轮轴顶块445螺栓M24×100123565Mn 1212Q235平垫圈24弹簧垫圈24GB/T 97.1-2002GB/T 93-1987GB/T 5780-2000GB/T 5780-200035GB/T 93-1987GB/T 97.1-2002Q23565Mn 888平垫圈20弹簧垫圈20螺栓M20×80油塞1Q235-A M42×2GB/T 5780-2000GB/T 93-1987GB/T 97.1-2002Q23565Mn 35GB/T 5780-2000GB/T 93-1987GB/T 97.1-2002Q23565Mn 35平垫圈20弹簧垫圈20螺栓M20×80GB/T 5780-2000GB/T 93-1987GB/T 97.1-2002Q23565Mn 35平垫圈20弹簧垫圈20681266881212螺栓M16×65弹簧垫圈16平垫圈16螺栓M20×120DDCCD-DAABBA-AB-B160-0.043530-0.2C-C润滑方式啮合特性参数太阳轮行星轮内齿轮太阳轮行星轮级别高速级低速级a i zmα精度等级啮合轴承油池飞溅8-7-7FH 8-7-7FH 油池飞溅3720°16212.517891992228164620°110内齿轮标记设计处数分区更改文件号签名年、月、日阶段标记重量比例共张第张标准化批准审核工艺斗轮减速器总装图1:51156575853545550515249464748434445424140393837363534333231302928272625242322212019181716151413121110987654321405808401080712572AA4×Ø46(锪平Ø70)C-C5200-0.51035201080882.5+0.12R 475R 510R 470M 148612015°15°3.23.250+0.0453.232C12-M24R25R20R20C60305.560112.5100367.5622-M19R35134.51506.37210405072×4=288R3120020026820443.5Ø845+0.046601429160151403×45°3×45°Ø865+0.052Ø880Ø901+0.0523.23.23.23.23.2H3.20.06H3.20.06HBBA-AR10R20R20R20R20R16R16Ø0.06H其余ⅡⅠ301072R5221022Ⅱ2:1M3012Ø50R82:1ⅠDDB-B50500305.5143.520020035540R20R20R20R203.26.3D-D1、铸件不得有夹砂,裂纹和缩孔等影响强度的铸造缺陷。
两级行星减速机结构两级行星减速机主要由输入轴、输出轴、两级行星轮系和壳体等组成。
输入轴通过联轴器与驱动装置连接,驱动装置将动力传递给输入轴。
输出轴通过输出轴支承,将动力传递给输出装置。
两级行星轮系由太阳轮、行星轮、内齿圈和行星架等组成,通过多个齿轮的传动将动力转换为输出轴的动力。
在两级行星减速机中,输入轴与太阳轮之间通过离合器连接,太阳轮通过内齿圈与输出轴连接。
内齿圈是两级行星减速机的核心部件,其齿数比太阳轮和行星轮多一,并且内齿圈静止不动。
行星轮通过行星架与内齿圈连接,行星架可以绕着行星轴旋转。
当输入轴通过太阳轮转动时,太阳轮的转动将行星架带动,使得行星轮绕着内齿圈旋转。
行星轮的旋转会带动输出轴的转动,实现动力传递。
两级行星减速机的结构紧凑、传动平稳的主要原因在于行星轮系的作用。
两级行星轮系由两个独立的行星轮系组成,第一级行星轮系将输入轴的动力转化为第一级输出轴的动力,第二级行星轮系将第一级输出轴的动力再次转化为第二级输出轴的动力。
通过这种两级的行星轮系结构,可以将大扭矩分成两个小扭矩传递,从而实现高扭矩的传递。
此外,两级行星减速机的壳体也是其结构的重要组成部分。
壳体是两级行星减速机的外部保护装置,起到固定和支撑作用。
壳体一般采用铸造或压制成型,并且具有良好的刚性和密封性。
壳体上通常设有散热片或散热孔,用于散热,保持减速机的正常工作温度。
总结起来,两级行星减速机是一种结构紧凑、传动平稳的传动装置。
其主要由输入轴、输出轴、两级行星轮系和壳体等组成。
两级行星轮系是两级行星减速机的核心部件,通过多个齿轮的传动将动力转换为输出轴的动力。
壳体起到固定和支撑作用,同时具有散热的功能。
两级行星减速机具有结构紧凑、传动平稳、承载能力强等特点,广泛应用于各个行业。
二级减速器机械设计论文减速器是将工作机作用在原动机上,使机械降低本身的转动速度,达到控制的目的。
下文是店铺为大家整理的关于二级减速器机械设计论文的范文,欢迎大家阅读参考!二级减速器机械设计论文篇1减速器设计中虚拟样机技术的应用探讨摘要:减速器设计是众多机械工业中必不可少的程序流程,而虚拟样机技术恰恰可以为减速器设计提供帮助,让减速器的设计更加容易,更加高效。
本文重点分析如何应用虚拟样机技术设计减速器,以期对众多机械工业设计部门有所帮助。
关键词:减速器设计;虚拟样机技术;应用减速器的原理是将工作机作用在原动机上,使机械降低本身的转动速度,达到控制的目的,目前,在众多机械工业中使用减速器,大到航空航天,小到我们的自行车,都离不开减速器的作用。
在传统的减速器设计中,往往技术人员需要事先制作需要试验的减速器,然后再将这些减速器用作设计研究,在这过程中,会浪费很多制作原件的时间,让设计过程放慢脚步,这不利于企业的发展。
所以,采用虚拟样机技术就成为了必然,它能减少设计研发的时间,增加设计的效率,为企业创造更多的价值,还能降低设计成本,对企业来说是非常值得推广的技术。
1 虚拟样机技术虚拟样机技术,最早诞生于上世纪80年代,它是一种以计算机技术为基础的设计手段,在产品设计研发的过程中,它能把零散的、甚至是不存在的零件组合成一个设计人员想要的完成品,在计算机中建立一个模型,以方便设计人员的分析、整理,还能将这个虚拟的完成品进行试验,以此检验它的性能,为以后的改进设计打下基础。
虚拟样机技术采用专业的设计软件进行工作,这些专业的软件非常适合设计人员的需求,上面有数不尽的零件信息,想要什么零件,都能在上面找到,如果实在找不到,还可以自己进行设计,用参数和几何模型就能实现。
设计人员通过在软件上,建立产品的模型、虚拟调配以及后期的仿真试验,就能对产品的设计有一个完整的认识,不需要再浪费时间制作原件,只需要动动手指,就能把设计搞定,这是多么高效率的工作方法。
二级减速原理
摘要:
1.二级减速原理的定义
2.二级减速原理的工作原理
3.二级减速原理的应用
4.二级减速原理的优点与局限性
正文:
1.二级减速原理的定义
二级减速原理,又称为双级减速原理,是一种在工程技术中广泛应用的减速原理。
其主要作用是通过两个减速器串联使用,达到减小驱动力矩、降低转速、增大输出扭矩的目的。
2.二级减速原理的工作原理
二级减速原理的工作原理可以简单概括为:将高速旋转的驱动轴通过第一个减速器降低转速,同时增大扭矩;然后再将经过第一个减速器减速后的轴通过第二个减速器进一步降低转速,同时继续增大扭矩。
这样,经过两个减速器后,驱动轴的转速会大幅度降低,扭矩会大幅度增大,从而满足某些工程应用场景的需求。
3.二级减速原理的应用
二级减速原理在工程技术中有广泛的应用,如:
(1)在自动化设备中:机器人、自动化生产线等设备,常常需要对驱动轴进行精确控制,二级减速原理可以提供较低的转速和较大的扭矩,满足这些设
备的运行需求。
(2)在交通工具中:某些交通工具,如汽车、船舶等,需要进行高速行驶与低速行驶的切换,二级减速原理可以实现这一功能。
(3)在风力发电中:风力发电机的转速往往较高,通过二级减速原理可以将转速降低到适合发电的范围,从而提高发电效率。
4.二级减速原理的优点与局限性
优点:
(1)可以实现较大的传动比,满足某些工程应用场景的需求。
(2)具有较好的稳定性和可靠性,使用寿命较长。
局限性:
(1)由于二级减速原理需要使用两个减速器,因此结构相对复杂,制造成本较高。

基于Simulink轮边二级减速系统动力学特性分析路新惠【摘要】The motor wheel mining truck secondary wheel hub reducer as the research object,analyzes the nonlinear factors of planetary gear transmission system. Use the lumped mass method to establish pure torsion nonlinear dynamic model. On the basis of derivation the component relative displacement, motion differential equation is obtained through Newtonian mechanics equation.Appropriate coordinate transformation is chosen,and derive the nonlinear integral differential equation. By eliminating the displacement of rigid body,the unified differential equation non dimensional analysis model is established. Based on Simulink to build the nonlinear model of the secondary wheel gear system. The results show that the typical nonlinear characteristics of the system such as the gap between the teeth, the time-varying mesh stiffness and the comprehensive engagement error are the typical nonlinear characteristics of the system.When the system is in a light load,the side clearance is the main factor that affects the dynamic characteristics of the system. When the system is overloaded, the dynamic characteristics of the system are very small,the impact of the system is not changed.%以电动轮矿用自卸车二级轮边减速器为研究对象,对行星齿轮传动系统中的非线性因素进行分析.运用集中质量法建立纯扭转非线性动力学模型,并在推导构件相对位移基础上,运用牛顿力学方程得到运动微分方程,选取合适的坐标变换,获得系统的非线性统一微分方程,并采用刚体位移消除法,获得方程的无量纲数学模型.基于Simulink搭建二级减速系统非线性模型,结果表明:齿侧间隙、时变啮合刚度和综合啮合误差的存在使系统出现跳跃现象等典型非线性特征.齿侧间隙在车辆载荷较小时,是影响系统动力学特性的主要因素,而当载荷较大时,其对系统的动态特性影响很小;啮合刚度不能改变系统的冲击特性;齿轮副的传动误差最大幅值随着系统阻尼系数的增大逐渐减小,达到一定值时,其振动幅值的跳跃现象则消失.采用试验对理论分析进行验证,表明理论分析的准确性,可作为设计参考依据.【期刊名称】《机械设计与制造》【年(卷),期】2018(000)003【总页数】4页(P91-94)【关键词】矿用自卸车;轮边减速系统;二级减速器;动力学特性;非线性;模型【作者】路新惠【作者单位】河南工业贸易职业学院机电工程系,河南郑州451191【正文语种】中文【中图分类】TH16;U463.2121 引言轮边行星减速系统是动力传递减速增扭的重要环节,其安装使用,使矿用自卸车后桥更加紧凑,减小其尺寸,提高车辆的通过性能和整车的装备质量,应用越来越普遍[1]。
二级行星齿轮传动系统非线性动力学特性分析二级行星齿轮传动系统非线性动力学特性分析摘要:行星齿轮传动是一种广泛应用于工业机械领域的传动形式。
本文研究了二级行星齿轮传动系统的非线性动力学特性,并通过数值模拟进行分析。
研究发现,在一定工作条件下,二级行星齿轮传动系统存在着非线性现象,如共振、反常周期振动等。
本文论述了这些非线性现象的产生机制,并分析了对传动性能的影响。
此外,本文还通过参数变化分析,探讨了如何通过调整传动系统的参数来减小或消除这些非线性现象。
最后,我们提出了一些建议,以提高二级行星齿轮传动系统的性能和减少非线性现象的发生。
关键词:行星齿轮传动;非线性动力学;共振;参数变化一、引言行星齿轮传动是一种常见的机械传动装置,在汽车、飞机、机床等领域得到了广泛应用。
其具有结构紧凑、传动比变化范围大、传动效率高等优点,是替代直接啮合齿轮传动的理想选择。
然而,行星齿轮传动系统由于其特殊结构而存在着一些非线性动力学问题,如共振、反常周期振动等。
这些问题严重影响了传动系统的性能和稳定性,因此其非线性动力学特性的分析对于传动系统的设计和优化具有重要意义。
二、二级行星齿轮传动系统的结构二级行星齿轮传动系统由太阳轮、行星轮和环轮组成。
太阳轮位于中间,行星轮分布在太阳轮的周围,环轮包围着所有行星轮。
当太阳轮以一定速度旋转时,通过行星轮的运动与环轮进行啮合,实现动力传递。
三、非线性动力学特性的分析1. 共振现象在二级行星齿轮传动系统中,由于行星轮与环轮之间的啮合关系,传动系统会产生一些共振现象。
共振是指系统的自然振动频率与外部激励频率相等或接近时,系统会出现大幅度振动。
这种共振现象对传动系统的正常工作具有不利影响,甚至可能导致传动系统的破坏。
在本文的数值模拟中,我们通过改变太阳轮的转速来研究了共振现象的发生条件,并分析了共振对传动系统性能的影响。
2. 反常周期振动在实际工作过程中,二级行星齿轮传动系统可能会出现反常周期振动现象。
目录摘要 (4)主要角下标 (4)第一部分概述 (6)1.1齿轮减速器的研究现状 (6)1.2齿轮减速器的发展趋势 (7)1.3我的课题的提出和论文的主要内容 (9)第二部分传动发案的确定 (11)2.1齿轮传动比较和选择 (11)2.1.1齿轮传动的特点 (11)2.1.2齿轮传动两种大的类型 (11)2.1.3定轴轮系和行星轮系的比较 (12)2.2选择行星机构的类型 (13)2.2.1行星机构的类型及特点 (13)2.2.1.1 Z-X-V型渐开线行星机构 (13)2.2.1.2 2Z-X型渐开线行星齿轮机构 (14)2.2.1.3 3Z型渐开线行星齿轮机构 (15)2.2.2渐开线行星齿传动的发展趋势 (16)第三部分设计计算与材料的确定及齿轮与轴的加工工艺性 (18)3.1传动系统的运动学和动力学计算 (18)3.1.1各级传动比计算 (18)3.1.2运动和动力参数计算 (19)3.2传动零件的设计步骤及参数的选择 (20)3.2.1设计步骤 (20)3.2.2齿轮材料的选择及其热处理 (21)3.2.3确定传动精度等级 (21)3.2.4 效率计算 (21)3.2.5装配条件的验算 (23)3.2.6两级之间连接计算 (24)3.2.7齿轮强度验算 (25)3.2.8齿轮加工工艺 (37)3.3轴设计计算与校核 (41)3.3.1低速轴的设计与校核 (41)3.3.2高速级的设计与校核 (46)3.3.3行星轮轴的设计与校核 (48)3.3.4行星轮轴的加工工艺 (51)3.4轴承的选择计算 (52)3.5键连接的选择计算 (55)3.6箱体的设计计算 (58)3.7润滑和密封的选择 (59)3.8传动装置的附件及说明 (59)第四部分设计小节 (60)附图1 (61)附图2 (62)附图3 (63)附图4 (64)第五部分参考资料 (65)摘要本文完成了对一个二级行星齿轮减速器的结构设计。
XXXXX毕业设计(论文) 2Z-X型NGW啮合两级行星齿轮减速设计学号:姓名:专业:系别:指导教师:二○一五年六月摘要本文完成了对2Z-X型NGW啮合方式两级行星齿轮减速的设计。
该减速器具有较小的传动比,而且,它具有结构紧凑、传动效率高、外廓尺寸小和重量轻、承载能力大、运动平稳、抗冲击和震动的能力较强、噪声低的特点。
首先简要介绍了课题的背景以及齿轮减速器的研究现状和发展趋势,然后比较了各种传动结构,从而确定了传动的基本类型。
论文主体部分是对传动机构主要构件包括太阳轮、行星轮、内齿圈及转臂的设计计算,通过所给的输入功率、传动比、输入转速以及工况系数确定齿轮减速器的大致结构之后,对其进行了整体结构的设计计算和主要零部件的强度校核计算。
最后对整个设计过程进行了总结,基本上完成了对该减速器的整体结构设计。
关键词:行星齿轮;传动机构;结构设计;校核计算ABSTRACTThis paper completed the 2Z-X of NGW structural design of the planetary gear reducer. The reducer has a smaller gear ratio, and it has a compact, high transmission efficiency, small size and light weight profile, large carrying capacity, smooth movement, a strong ability to shock and vibration, low noise characteristics.Briefly introduces the background and current situation and development trend of research topics gear reducer, and then compare the various transmission structure, which determines the basic types of transmission. The main part of the paper is the main member of the transmission mechanism including a sun gear, planetary gear, the ring gear and the planet carrier is designed to calculate, by means of a given input power, the transmission ratio, the input rotation speed and the operating conditions to determine the approximate coefficients after the configuration of the gear reducer its strength check calculation carried out to calculate the overall structure and design of the major components. Finally, a summary of the entire design process, basically completed the overall structural design of the reducer. KEYWORDS:Planetary gear; transmission mechanism; Structural design; Checking calculation目录摘要 (I)ABSTRACT (II)目录 .............................................................................................................................. I II 1绪论 (1)1.1研究背景及意义 (1)1.2行星齿轮减速器研究现状 (1)1.3行星齿轮减速器发展趋势 (2)1.4论文的基本内容 (2)2总体方案设计 (3)2.1设计要求 (3)2.2总体方案选择 (3)2.2.1行星机构的类型及特点 (3)2.2.2确定行星齿轮传动类型 (5)3齿轮的设计计算 (6)3.1配齿计算 (6)3.2初步计算齿轮的主要参数 (7)3.2.1计算高速级齿轮的模数m (7)3.2.2计算低速级的齿轮模数m (7)3.3啮合参数计算 (8)3.3.1高速级 (8)3.3.2低速级 (8)3.3.3高速级变位系数 (9)3.3.4低速级变位系数 (9)3.4几何尺寸的计算 (9)3.4.1 高速级 (9)3.4.2 低速级 (10)3.4.3插齿刀齿根圆直径的计算 (10)3.5装配条件的验算 (11)3.5.1邻接条件 (11)3.5.2同心条件 (11)3.5.3安装条件 (12)3.6传动效率的计算 (12)ϕ的确定 (12)3.6.1 高速级啮合损失系数1xϕ的确定 (13)3.6.2低速级啮合损失系数2x3.7齿轮强度的验算 (14)3.7.1 高速级外啮合齿轮副接触强度的校核 (14)3.7.2 高速级外啮合齿轮副弯曲强度的校核 (16)3.7.3 高速级内啮合齿轮副接触强度的校核 (17)3.7.4 低速级外啮合齿轮副接触强度的校核 (18)3.7.5低速级外啮合齿轮副弯曲强度的校核 (19)3.7.6低速级内啮合齿轮副接触强度的校核 (21)4轴的设计计算 (22)4.1行星轴设计 (22)4.1.1初算轴的最小直径 (22)4.1.2选择行星轮轴轴承 (23)4.2转轴的设计 (24)4.2.1 输入轴设计 (24)4.2.2 输出轴设计 (25)5转臂、箱体及附件的设计 (27)5.1转臂的设计 (27)5.1.1转臂结构方案 (27)5.1.2转臂制造精度 (28)5.2箱体的设计 (30)5.3其他附件的选用 (31)5.3.1标准件及附件的选用 (31)5.3.2密封和润滑 (32)结论 (33)致谢 (34)参考文献 (35)1绪论1.1研究背景及意义行星齿轮传动在我国已有了许多年的发展史,很早就有了应用。
二级减速器中间轴受力分析与改进
二级减速器中间轴所受力主要包括径向力和轴向力两部分。
首先,对于径向力的问题,可以通过以下措施进行改进:
1.增加中间轴的直径,提高其强度和刚度,减小受力面积,降低应力集中程度。
2.采用精密加工技术,提高轴的加工精度和表面质量,减小表面缺陷和毛刺,避免由于表面不光滑导致的起伏应力。
3.采用合适的材料,如使用高强度钢材或更轻的钛合金材料,提高轴的材料强度和抗拉强度,减少变形和疲劳损伤。
接下来,是针对轴向力的问题,我们可以通过以下方法改进:
1.安装配重以解决静态和动态不平衡问题。
2.增加轴承数量,以均衡负载和减小应力点集中。
3.合理设计齿轮模数,减少轮齿面的动载荷,降低轴承负荷。
综上所述,通过以上措施可有效改进二级减速器中间轴的受力问题,提高其可靠性和使用寿命。
两级功率分流式行星传动的运动学与动力学分析行星传动具有多种显著的优异特点,常见优点如:传动比范围广、体积小、质量轻、承载及抗冲击能力强。
得益于比普通定轴传动更多的应用优点,行星齿轮传动在各种类型的使用场景中取得了普遍应用,比如:航天传动机械、采矿起重机械、风力发电、汽车传动、国防事业。
功率分流式行星传动机构相比于常用的行星传动,其传动比范围更大,同时因为具备功率分流特性,相比于同等程度传动范围的普通传动,其整体的结构承载及对抗激励冲击能力更加优异,因此传动过程中,分流式传动机构运行更加精确、更加稳定。
考虑到分流式行星传动机构的巨大潜力,有必要针对功率分流式行星传动此种传动类型进行传动机理研究,因此,本文主要考虑从运动学与动力学两个方面,针对某类型两级功率分流式行星传动机构进行相关传动研究及实验,主要包括:首先对两级功率分流式行星传动机构的结构组成进行了分析,通过分析其机构组成对其结构进行了简化,将两级传动结构转化为第一级两自由度差动行星传动和第二级单自由度准行星传动。
之后对其设计流程进行分析,按照给定设计要求、配齿计算、传动比误差检验、模数计算、啮合参数计算、变位判断及相应求解、几何尺寸计算、装配条件验算、机构效率计算、最后进行传动件强度校核,这样的系统流程进行本文研究的分流式行星传动机构类型的设计。
并用计算机语言将设计流程编写成电脑软件,简化设计计算量、提高设计速度和计算精度。
运动学方面,对本文研究的两级功率分流式行星传动机构进行分析,推导了其系统传动比、系统各级各构件的转速、系统传动效率计算模型、两级功率分流比例系数计算公式。
同时分别对传动机构的两级行星排特性参数与系统总传动比、各传动件转速、以及传动过程中两级传动的传递功率的分流比例进行分析。
分析计算结果发现,系统整体传动比绝对值分别与两级的行星排特性参数呈正相关关系。
不考虑输入转速的影响,第一级传动各构件以及第二级传动中的太阳轮转速仅与第一级传动的行星排特性参数有关,具体表现为呈反比。
两级行星减速器动力学特性研究本文旨在研究两级行星减速器的动力学特性。
我们将简要介绍行星减速器的基本原理、工作原理和应用场景。
接着,我们将详细阐述两级行星减速器的动力学特性,包括刚度、阻尼和传动机理。
我们将总结研究结果,并指出可能存在的问题和未来的研究方向。
行星减速器是一种常见的机械传动装置,广泛应用于各种工业领域。
它通过齿轮传动系统实现动力传递,并具有高效率、高转矩、体积小等优点。
行星减速器的工作原理主要基于行星轮系的基本原理,即太阳轮、行星轮和内齿圈之间的相互运动关系。
通过调节齿轮参数,行星减速器可以达到不同的减速比和输出转矩。
在许多实际应用中,单级行星减速器往往无法满足某些特定场合的传动要求。
例如,某些需要大减速比和高输出转矩的场合,单级行星减速器的传动效率可能较低,同时其体积也可能过大。
为了克服这些问题,两级行星减速器应运而生。
它通过两级行星轮系串联或并联的方式,实现了更高的减速比和更大的输出转矩,同时保持了较高的传动效率。
两级行星减速器的动力学特性是研究的核心内容。
刚度是指系统抵抗外部干扰的能力,阻尼则表示系统吸收和耗散能量的能力。
在两级行星减速器中,刚度和阻尼不仅取决于各个零件的力学性能,还与整个系统的传动机制密切相关。
传动机理也是研究两级行星减速器动力学特性的重要方面。
它涉及到能量如何在各级行星轮系之间传递,以及如何转化为最终输出转矩的问题。
通过建立两级行星减速器的动力学模型,我们可以对刚度、阻尼和传动机理进行深入研究。
模型中需要考虑的因素包括齿轮、轴承、箱体等部件的弹性、阻尼和摩擦等。
利用这些参数,可以数值模拟两级行星减速器的动态响应,进而分析其动力学特性。
在刚度方面,两级行星减速器具有较好的抗干扰能力。
由于两级行星轮系的串联或并联设计,使得外部负载对系统的影响得到一定程度的抵消或分散。
这有助于提高系统的稳定性,并降低对零部件的损伤风险。
阻尼方面,两级行星减速器中的阻尼机制主要来源于各部件之间的摩擦和冲击。
这些摩擦和冲击在能量传递过程中不可避免地会产生能量损失,从而形成阻尼。
适当的阻尼有助于减小系统振幅,提高稳定性,并降低噪音。
传动机理方面,两级行星减速器通过多级行星轮系的相互配合,实现了动力的高效传递。
在各级轮系之间,能量逐级传递并逐渐转化为输出转矩。
这种传递机制使得两级行星减速器能够达到较高的传动效率和转矩输出。
尽管两级行星减速器具有诸多优点,但在实际应用中仍然存在一些问题。
例如,由于多级传动和复杂的机械结构,两级行星减速器的制造和调试难度较大。
在高速、重载等极端工况下,仍可能发生零部件的疲劳损坏、润滑不良等问题。
因此,未来的研究方向可以集中在优化设计、提高制造质量、加强可靠性等方面。
两级行星减速器作为一种先进的传动装置,在动力学特性方面具有优异的表现。
通过深入研究和优化设计,可以进一步提高其性能和可靠性,为各种工业领域提供更加稳定、高效的传动解决方案。
摘要:本文主要探讨了行星减速器的虚拟装配与动力学特性研究。
对行星减速器的基本原理和相关研究进行了综述,然后采用理论分析和实验研究相结合的方法,对其虚拟装配和动力学特性进行了深入研究。
实验结果表明,虚拟装配技术可以有效提高行星减速器的装配质量和效率,同时降低成本和缩短研发周期。
本文总结了研究成果并指出了未来可能的研究方向。
引言:行星减速器是一种广泛应用于机械、电力、石油化工等领域的重要传动装置。
随着科技的不断进步,对于行星减速器的性能和效率要求越来越高。
因此,提高行星减速器的装配质量和效率、降低成本以及缩短研发周期具有重要的现实意义。
近年来,随着计算机技术和虚拟技术的不断发展,虚拟装配技术在工程领域的应用越来越广泛。
本文旨在探讨行星减速器的虚拟装配与动力学特性研究,以期为其优化设计和生产提供理论支持和实践指导。
文献综述:行星减速器作为一种重要的传动装置,其相关研究一直受到广泛。
在过去的几十年里,研究者们在行星减速器的设计、制造、装配等方面进行了大量研究。
近年来,随着计算机技术和虚拟技术的不断发展,虚拟装配技术在工程领域的应用越来越广泛。
国内外许多学者对行星减速器的虚拟装配技术进行了研究,并取得了一系列重要成果。
研究方法:本文采用理论分析和实验研究相结合的方法,对行星减速器的虚拟装配和动力学特性进行了深入研究。
利用三维建模软件SolidWorks建立了行星减速器的三维模型。
然后,利用虚拟现实软件Virtools进行了虚拟装配实验,并对装配过程进行了可视化模拟。
同时,利用Adams软件对行星减速器的动力学特性进行了仿真分析。
结果与讨论:通过虚拟装配实验和动力学特性仿真分析,本文得到了以下虚拟装配技术可以有效提高行星减速器的装配质量和效率。
在虚拟环境下进行装配模拟,可以及时发现和解决装配过程中可能出现的问题,避免了实际装配过程中可能出现的错误,从而提高了装配效率和质量。
虚拟装配技术可以降低成本和缩短研发周期。
通过在虚拟环境中进行装配模拟和优化,可以减少试制次数和试验成本,缩短产品研发周期,从而降低整个产品的成本。
动力学特性仿真分析可以进一步优化行星减速器的设计和性能。
通过Adams软件对行星减速器的动力学特性进行仿真分析,可以获得更准确的动态性能指标,从而对行星减速器的设计和性能进行优化。
本文对行星减速器的虚拟装配与动力学特性进行了深入研究。
实验结果表明,虚拟装配技术可以有效提高行星减速器的装配质量和效率,同时降低成本和缩短研发周期。
动力学特性仿真分析可以进一步优化行星减速器的设计和性能。
因此,本文的研究成果对于优化行星减速器的设计和生产具有重要的理论意义和实践价值。
未来研究方向:本文的研究虽然取得了一定的成果,但仍存在一些不足之处和需要进一步研究的问题。
例如,可以进一步研究行星减速器的虚拟装配工艺规划和优化方法;可以结合深度学习和机器学习等先进技术,实现行星减速器设计的自动化和智能化;可以开展更多的实验验证,以进一步提高虚拟装配技术和动力学特性仿真分析的准确性和可靠性。
船用汽轮机是一种广泛应用于大型船舶的动力装置,其作用是利用蒸汽推动汽轮机内的转子旋转,进而带动船舶前进。
行星齿轮减速器则是汽轮机的重要组成部件,其主要作用是降低转速、增加扭矩,以确保汽轮机的正常运转。
然而,行星齿轮减速器在运转过程中,其轴系动力学特性对船舶的稳定性和可靠性具有重要影响。
因此,本文旨在研究船用汽轮机行星齿轮减速器轴系动力学特性,以提高船舶的动力学性能和稳定性。
行星齿轮减速器是一种常见的减速器类型,其基本原理是利用行星轮、太阳轮和内齿圈之间的相对运动产生减速效果。
然而,行星齿轮减速器在运转过程中,由于制造误差、装配不当等因素,容易导致轴系动力学问题,如扭转振动、弯曲振动、剪切振动等。
这些动力学问题不仅会影响减速器的使用寿命,严重时还会引发船舶的安全事故。
船用汽轮机行星齿轮减速器的轴系动力学特性主要包括扭转、弯曲、剪切等典型问题。
在扭转振动方面,主要由行星轮和太阳轮之间的啮合冲击引起,可通过优化行星轮和太阳轮的齿形和间隙来降低扭转振动。
在弯曲振动方面,主要由轴的刚度不足和支撑不当引起,可通过优化轴的刚度和支撑结构来降低弯曲振动。
在剪切振动方面,主要由轴的切向力和轴心位移的不平衡引起,可通过优化轴的结构和支承方式来降低剪切振动。
为了深入了解船用汽轮机行星齿轮减速器轴系动力学特性,本研究利用计算机软件进行数值模拟分析。
通过建立行星齿轮减速器的详细模型,对减速器在运转过程中的扭转、弯曲、剪切等典型问题进行模拟。
然后,通过对比实验数据和模拟结果,对模拟模型的准确性和可靠性进行评估。
还对不同参数和工况下的轴系动力学特性进行了敏感性分析,为优化行星齿轮减速器设计提供了依据。
为了验证数值模拟分析的准确性,本研究进行了实验研究。
搭建了船用汽轮机行星齿轮减速器的实验台,并采用高精度传感器对减速器在运转过程中的扭转、弯曲、剪切等典型问题进行测量。
然后,将实验数据与数值模拟分析的结果进行对比,发现两者之间的误差较小,验证了数值模拟分析的准确性。
还对实验过程中出现的实际问题进行了分析,提出了相应的改进措施。
结论本研究对船用汽轮机行星齿轮减速器轴系动力学特性进行了深入研究,取得了以下成果:明确了行星齿轮减速器在船舶动力系统中重要作用及其对船舶稳定性和可靠性的影响;建立了行星齿轮减速器的详细模型,深入研究了其轴系动力学特性及主要影响因素;通过数值模拟分析和实验研究验证了行星齿轮减速器轴系动力学特性的研究方法和准确性的有效性;针对实验过程中出现的实际问题提出了相应的改进措施,为进一步优化行星齿轮减速器的设计提供了依据。
然而,本研究仍存在一些不足之处,如未能全面考虑行星齿轮减速器在实际工况中受到的多因素影响等。
未来将进一步开展更加深入的研究,以完善行星齿轮减速器轴系动力学特性的理论体系,提高船舶的动力学性能和稳定性。
盾构机是一种广泛应用于地铁、隧道等基础设施建设中的大型工程机械。
减速器是盾构机的重要组成部件之一,它通过降低电机或发动机的高转速,将其转换为低速高扭矩的输出,以满足盾构机挖掘、推进等作业的需求。
在减速器中,行星齿轮传动具有高效率、高承载能力等优点,被广泛应用于盾构机的减速传动。
本文基于啮合相位分析,对盾构机减速器多级行星齿轮传动的动力学特性进行研究。
在过去的研究中,国内外学者在盾构机减速器领域取得了许多研究成果。
行星齿轮传动作为减速器的重要部分,已引起了广泛。
通过合理的齿轮设计和加工,可以提高行星齿轮传动的效率和承载能力。
啮合相位分析是研究齿轮动态性能的重要方法,它可以通过分析齿轮的啮合过程,预测齿轮在不同工况下的动态响应。
然而,现有的研究大多集中在行星齿轮传动的优化设计上,而对啮合相位的影响研究较少。
针对盾构机减速器的多级行星齿轮传动设计,本文提出以下思路和方法。
根据盾构机的实际需求,确定减速器的功率、转速和扭矩等参数。
然后,通过行星轮系的选取和设计,实现减速器的多级传动。
材料的选择和齿轮的加工与装配也是设计的关键环节。
在具体的传动设计中,行星轮系的布置形式对减速器的传动性能有重要影响。
根据盾构机的空间限制和传动比需求,选择合适的行星轮系形式,如NGW、NW等。
同时,考虑材料的经济性和可靠性,选择适合的齿轮材料,如铸钢、锻钢等。
在齿轮的加工与装配过程中,采用先进的加工设备和精确的测量技术,确保齿轮的精度和质量。
为验证本文提出的盾构机减速器多级行星齿轮传动的设计方法,进行了相关实验。
实验过程中,通过加载不同工况下的啮合相位数据,对齿轮的动态性能进行检测。
利用高速动态采集系统和专业的数据分析软件,对实验数据进行处理和分析。
实验结果表明,采用本文设计的多级行星齿轮传动方案,减速器的动态性能得到了显著提升。
相较于传统减速器,本文设计的多级行星齿轮传动的啮合相位优化,有效地降低了齿轮在啮合过程中的冲击和振动,提高了减速器的稳定性和可靠性。