Workbench心得——行星齿轮瞬态动力学分析
- 格式:docx
- 大小:1.40 MB
- 文档页数:11
在本文中,我将为您撰写一篇关于ANSYS Workbench瞬态动力学实例的文章。
我们将深入探讨ANSYS Workbench在瞬态动力学仿真方面的应用,从简单到复杂、由浅入深地讨论其原理和实践操作,并共享个人观点和理解。
第一部分:介绍ANSYS Workbench瞬态动力学仿真ANSYS Workbench是一种用于工程仿真的全面评台,包含了结构、流体、热传递、多物理场等多种仿真工具。
瞬态动力学仿真是ANSYS Workbench的重要应用之一,它能够模拟在时间和空间上随机变化的动力学过程,并对结构在外部力作用下的动力响应进行分析。
在瞬态动力学仿真中,ANSYS Workbench可以模拟诸如碰撞、冲击、振动等动态载荷下的结构响应,用于评估零部件的耐久性、振动特性、动态稳定性等重要工程问题。
通过对这些现象的模拟和分析,工程师可以更好地了解结构在实际工况下的性能,进而进行有效的设计优化和改进。
第二部分:实例分析为了更直观地展示ANSYS Workbench瞬态动力学仿真的应用,我们以汽车碰撞仿真为例进行分析。
假设我们需要评估汽车前部结构在碰撞事故中的动态响应,我们可以通过ANSYS Workbench建立汽车前部结构的有限元模型,并对其进行碰撞载荷下的瞬态动力学仿真。
我们需要构建汽车前部结构的有限元模型,包括车身、前保险杠、引擎盖等部件,并设定材料属性、连接方式等。
接下来,我们可以在仿真中引入具体的碰撞载荷,如40km/h车速下的正面碰撞载荷,并进行瞬态动力学仿真分析。
通过仿真结果,我们可以获取汽车前部结构在碰撞中的应力、应变分布,以及变形情况,从而评估其在碰撞事故中的性能表现。
第三部分:个人观点与总结通过以上实例分析,我们可以看到ANSYS Workbench瞬态动力学仿真在工程实践中的重要应用价值。
瞬态动力学仿真不仅能够帮助工程师分析结构在动态载荷下的响应,还可以为设计优化、安全评估等工程问题提供重要参考。
基于Workbench的齿轮齿廓修形研究
刘菡华
【期刊名称】《汽车与驾驶维修:维修版》
【年(卷),期】2022()3
【摘要】本文以某一变速器倒挡直齿轮为研究对象,基于齿廓弹性变形原理,对齿轮的啮入和啮出位置进行静力学分析,得到齿轮的应力分布云图及最大的轮齿变形。
齿廓的最大修形量提取分析得到的轮齿最大变形量为依据,选择walker修形曲线,通过计算得到修形长度,从而建构出修形之后的轮齿模型。
最后用瞬态动力学模拟未修形和已修形的齿轮啮合过程,验证修形之后的齿轮接触应力曲线更平顺,啮合状态得到改善。
【总页数】4页(P42-44)
【作者】刘菡华
【作者单位】闽北职业技术学院
【正文语种】中文
【中图分类】TH132.41
【相关文献】
1.高速渐开线斜齿圆柱齿轮齿廓修形技术研究
2.基于修形插齿刀具的非圆柱齿轮齿廓修形方法
3.渐开线直齿圆锥齿轮齿廓圆弧修形方法研究
4.锥形砂轮齿轮磨削齿廓修形方法研究与改进
5.基于圆柱齿轮齿顶修形的弧线齿面齿轮齿面设计研究
因版权原因,仅展示原文概要,查看原文内容请购买。
图1 齿轮副仿真模型图2 齿廓修形参数示意图验公式及有限元法,都可以确定轮齿的最大修形量。
有限元技术建立在弹性力学理论基础上,对具体的工况进行了分析,所得的结果是轮齿接触弯曲、剪切等各种变形的组合,能够准确反映齿轮的应力和变形状态。
本文对大小齿轮的齿顶分别修形,通过有限元提取啮入点和啮出点的变形量,与某一最大修形量经验公式进行对比,分析及过程如下。
图3a是齿轮刚啮入状态,小齿轮是主动轮,带动大齿轮运转。
“1”处为小齿轮某齿刚刚进入啮合时的状态,理想情况下是不存在变形的。
但实际啮合中,由于“2”和“3”处齿面接触弹性变形的影响,小齿轮在啮入的瞬间,大齿轮的齿顶与小齿轮的齿根位置发生少量干涉“Δ”,形成啮入时的冲击。
这个干涉量相当于大齿轮齿顶的修形量。
同理,如图3b所示,“4”处为小齿轮某齿退出啮合的瞬间,受到“1”、“2”和“3”处齿面接触弹性变形的影响。
小齿轮在2.2 齿廓修形曲线与修形长度本文选取walker修形曲线进行修形,修形曲线的方程如下。
式中 L——单双齿啮合区分界点到啮入点(或啮出点)的距离, 即为修形的长度X——啮合点的相对坐标,沿啮合线,原点在单双齿交替 点处Δ——距离为X时的修形量,Δmax为最大修形量建立修形齿轮渐开线模型(图5),用作图法求得齿轮的实际啮合线的长度B B=12.391,求得重合度ε=1.399,则修形长图3 齿轮啮合示意图图5 啮合点相对坐标计算示意图图4 变形量提取结果所以其中,αk为渐开线发生线与渐开线交点所对应的压力角。
图6 定义接触对图8 载荷设置图9 未修形的齿轮啮入、最大应力及啮出状态图10 修形后的齿轮啮入、最大应力及啮出状态图7 网格划分图11 修形前接触应力变化图图12 修形后接触应力变化图载荷和时间步的设置:在大小两个齿轮中心施加一个相对于地面的转动副,设置小齿轮为主动轮,在小齿轮上施加251.33 rad/s的转速,大齿轮上施加201.25 N•m的阻力矩(图8)。
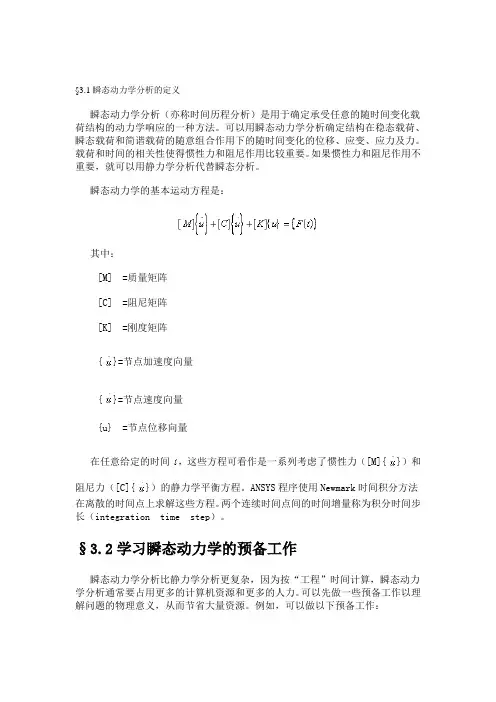
§3.1瞬态动力学分析的定义瞬态动力学分析(亦称时间历程分析)是用于确定承受任意的随时间变化载荷结构的动力学响应的一种方法。
可以用瞬态动力学分析确定结构在稳态载荷、瞬态载荷和简谐载荷的随意组合作用下的随时间变化的位移、应变、应力及力。
载荷和时间的相关性使得惯性力和阻尼作用比较重要。
如果惯性力和阻尼作用不重要,就可以用静力学分析代替瞬态分析。
瞬态动力学的基本运动方程是:其中:[M] =质量矩阵[C] =阻尼矩阵[K] =刚度矩阵{}=节点加速度向量{}=节点速度向量{u} =节点位移向量在任意给定的时间,这些方程可看作是一系列考虑了惯性力([M]{})和阻尼力([C]{})的静力学平衡方程。
ANSYS程序使用Newmark时间积分方法在离散的时间点上求解这些方程。
两个连续时间点间的时间增量称为积分时间步长(integration time step)。
§3.2学习瞬态动力学的预备工作瞬态动力学分析比静力学分析更复杂,因为按“工程”时间计算,瞬态动力学分析通常要占用更多的计算机资源和更多的人力。
可以先做一些预备工作以理解问题的物理意义,从而节省大量资源。
例如,可以做以下预备工作:1.首先分析一个较简单模型。
创建梁、质量体和弹簧组成的模型,以最小的代价深入的理解动力学认识,简单模型更有利于全面了解所有的动力学响应所需要的。
2.如果分析包括非线性特性,建议首先利用静力学分析掌握非线性特性对结构响应的影响规律。
在某些场合,动力学分析中是没必要包括非线性特性的。
3.掌握结构动力学特性。
通过做模态分析计算结构的固有频率和振型,了解这些模态被激活时结构的响应状态。
同时,固有频率对计算正确的积分时间步长十分有用。
4.对于非线性问题,考虑将模型的线性部分子结构化以降低分析代价。
<<高级技术分指南>>中将讲述子结构。
§3.3三种求解方法瞬态动力学分析可采用三种方法:完全(Full)法、缩减(Reduced)法及模态叠加法。
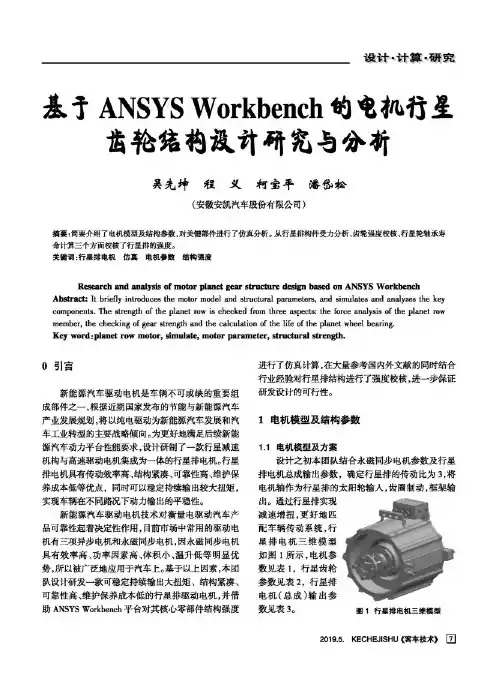
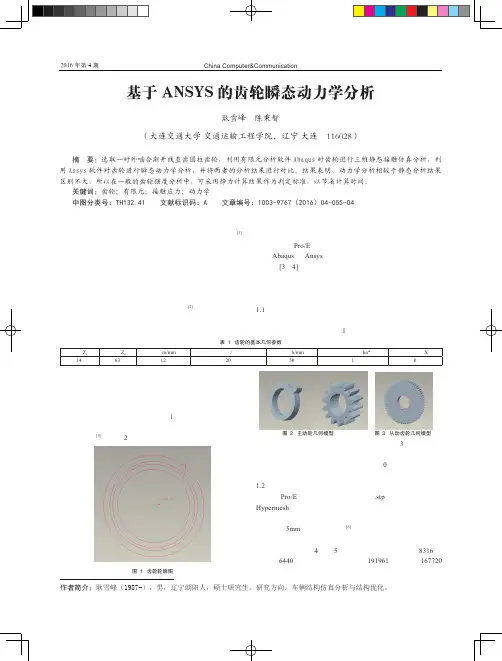
图1 齿轮轮廓图
主动轮几何模型 图3 从动齿轮几何模型重复以上操作,得到从动齿轮模型,如图3所示。
采用销钉约束方式,将两个齿轮进行装配,之后将配合好的模型进行全局干涉检查。
干涉体积为0,整体装配成功,
.stp格式,而后导中。
网格划分越细,则计算精度越高,但是计算时间会随之增加。
所以,应该适当选取网格大小。
本文根据。
首先对单齿进行划分,而后
作者简介:耿雪峰(1987-),男,辽宁朝阳人,硕士研究生。
研究方向:车辆结构仿真分析与结构优化。
图4 主动齿轮有限元模型 图5 从动齿轮有限元模型2 基于Abaqus的静态接触分析
2.1 接触类型与接触方式
本文中的主、从齿轮材料相同,刚度相近,故采用柔体—柔体的接触类型[8]。
在所有的接触方式中,面—面接触支持低阶和高阶单元,适用于表面复杂、具有大变形和摩擦力的接触问题,没有表面形状的限制。
而齿轮接触属于典型的非
图6 齿轮接触面示意图
加载及约束
在大齿轮圆心建立参考点“RP-big”,在小齿轮圆心建
图7 齿轮副应力云图图8 从动齿轮应力云图
载荷步3结果
载荷步4结果
载荷步5结果
载荷步1结果
载荷步2结果
载荷步6结果
图9 从动齿轮应力云图
可看出,动力学计算应力值较静态计算结果高出约为8.1%。
以上结果表明,在一般的齿轮强度分析中,动力学计算结果高于静态计算结果,但是差别不大。
因此,对齿轮的强度进行校核时,如无特殊要求,可采用静态计算结果作为齿轮强度的评。
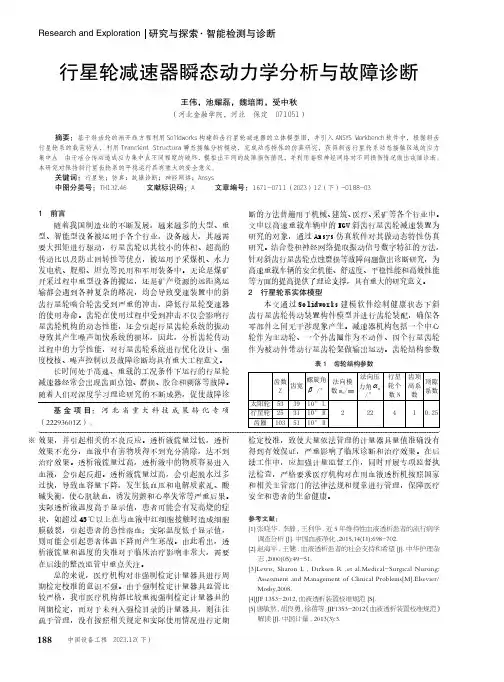
188研究与探索Research and Exploration ·智能检测与诊断中国设备工程 2023.12(下)1 前言随着我国制造业的不断发展,越来越多的大型、重型、智能型设备被运用于各个行业,设备越大,其越需要大扭矩进行驱动,行星齿轮以其较小的体积、超高的传动比以及防止回转性等优点,被运用于采煤机、水力发电机、舰船、坦克等民用和军用装备中。
无论是煤矿开采过程中重型设备的搬运,还是矿产资源的远距离运输都会遇到各种复杂的路况,均会导致变速装置中的斜齿行星轮啮合轮齿受到严重的冲击,降低行星轮变速器的使用寿命。
齿轮在使用过程中受到冲击不仅会影响行星齿轮机构的动态性能,还会引起行星齿轮系统的振动导致其产生噪声加快系统的损坏,因此,分析齿轮传动过程中的力学性能,对行星齿轮系统进行优化设计、强度校核、噪声控制以及故障诊断均具有重大工程意义。
长时间处于高速、重载的工况条件下运行的行星轮减速器经常会出现齿面点蚀、磨损、胶合和剥落等故障。
随着人们对深度学习理论研究的不断成熟,促使故障诊基金项目:河北省重大科技成果转化专项(22293601Z)。
行星轮减速器瞬态动力学分析与故障诊断王伟,池耀磊,魏培雨,受中秋(河北金融学院,河北 保定 071051)摘要:基于斜齿轮的渐开线方程利用Solidworks 构建斜齿行星轮减速器的立体模型图,并引入ANSYS Workbench 软件中,根据斜齿行星轮系的载荷特点,利用Trancient Structura 瞬态接触分析模块,完成动态特性的仿真研究,获得斜齿行星轮系动态接触区域的应力集中点。
由于啮合传动造成应力集中点不同程度的破坏,模拟出不同的故障损伤情况,并利用卷积神经网络对不同损伤情况做出故障诊断。
本研究对保持斜行星齿轮系的平稳运行具有重大的安全意义。
关键词:行星轮;仿真;故障诊断;神经网络;Ansys中图分类号:TH132.46 文献标识码:A 文章编号:1671-0711(2023)12(下)-0188-03断的方法普遍用于机械、建筑、医疗、采矿等各个行业中。
基于Workbench的行星齿轮组热-结构耦合分析杨淑贞;董彬【摘要】基于有限元分析、齿轮啮合、摩擦生热等理论,建立了行星齿轮组有限元模型,计算了某汽车齿轮减速箱齿轮热稳态分析的边界条件。
利用ANSYS Workbench软件对齿轮组进行整体热-结构耦合分析和单独结构分析,将得到的数据进行分析对比,得到啮合轮齿处应力和位移的变化,分析了温度场对相关变化的影响,为研究某汽车行星齿轮组的结构优化提供了更加准确的依据,对同类型零部件的热-结构耦合分析具有一定的指导意义。
【期刊名称】《制造业自动化》【年(卷),期】2015(000)012【总页数】3页(P75-76,96)【关键词】齿轮啮合;ANSYS Workbench;热-结构耦合【作者】杨淑贞;董彬【作者单位】黄河交通学院汽车工程学院,焦作 454950;黄河交通学院汽车工程学院,焦作 454950【正文语种】中文【中图分类】TH1220 引言行星齿轮组是汽车减速箱关键零部件之一,其传动性能直接影响着汽车减速箱的工作性能,由于汽车行驶过程中调速频繁,齿轮收到的扭矩强度大,因而行星齿轮组传动故障也是汽车多发故障之一。
现有研究多集中在对重载齿轮应力及位移的分析及验证结构的合理性,并未考虑到齿轮啮合摩擦过程中热因素的影响[1~3]。
在实际工况中齿轮啮合摩擦会产生大量的热,热变形和热应力会主导齿轮应力分布情况,在温度和应力影响下会造成齿轮胶合或点蚀失效。
查阅当前文献发现国内外的学者对热分析方法、温度场在啮合齿轮内部的分布以及对流换热、热传导等热边界条件的确定都进行了研究[4~6]。
热对齿轮传动过程中的应力有很大影响,但现有研究大多将应力和温度单独进行研究,研究结果实际并不能很好地模拟实际传动过程中应力变化以及确定最大应力位置。
在此基础上国内有部分学者进行了探索:梅益等人对重载减速箱进行了热-结构耦合的研究[7],赵丽娟等人进行了采煤机截割部摇臂整体虚拟样机的温度结构耦合分析,为相应零件的结构设计和优化提供了更加准确的量化数据[8]。
然后我们就需要对模型添加约束和连接,主要包括有 看下面详述。
在这里首先将三角形的齿轮架给刚化, 因为整个分析中不考虑它的影响, 主要首先拿到模型可以看出这里是个行星轮结构。
考虑齿轮之间的作用。
joints 禾口 frictionl ess con tacts,添加完的效果如图。
添加过程请首先添加三个类似的运动副,都是需要Body-Ground形式。
第一个添加太阳轮的旋转副。
revolute joint 。
Body-ground。
再添加三角架的旋转副。
revolute joint 。
Body-ground。
CAEmMttric Jmm, kq, "4,気 mV, nrA) Degrees再添加内齿圈的固定副。
fixed joint 。
Body-ground 。
Filr- Fdrt Vtew UniE Toe i Hetp Q专皿砖甸tl 诡冏因・)▼ —t1臂斤胃A IB O 1® ■胡▼ 二屮毀題■软匹q ci.罠-科h 営how "i/rrticr 1!W^e+fBrw■ Edg@ "応ring 寿〒 X T J X * 1*1 HEldwn AnnetiiiciME 品切 li lu^iiLL^r»'urd 呼 备肚血 Sody * AR EudL 川5帕 h b匸 ewv&tiym :| K *Qu0mc ji] PT«|«r R jSl Gffnffle4r/± "Au 匚□nrtrtaiE 1 S«fcT*ms U 丿谢 匚汕neetm-s0# 麵 iwi b -毎-寸夸 & ^du * «-(jTDUTd Ta E 「29](±--^3 R E .•cki ■* - Gi QLjnd Tn F [±3]匹、坤 I 亠 JP and 1© A [40] 占"电 *3111 2舟Y 爷 & -FT4U 兀亍PK 审I Ccnlacb・* Fl*KJbElhlE£・ 【勒 To SL+lj. Y X1=低凶理毋・BI] web1 r-a n-Meaiii [B5] t.亘 intel Ccriil 口r-卉di 也W 用卜Srlifch 弼遵伞JcH *阴tabard 帕Pty 刁片垫 Solution LB6J…> _Ll 女Ld 即"n\ “上li* i ; 昨Ew .-ilk i 【9bConrect]«i Type Ecdy-<jrcund T i fxR JVD J utie T^^»jfidl ^Slfr' t JL {I M ITOU *TEidbrull Da 片 屯 N-mmV5uppr 疋 dItrtrwceCc>2rcfan!Ttr Syrtffr- ;^ferr-ic? Ctwrd ~^e z-y^t-r?"5-upir>g MethodGeonwtn甬KI心pe J ismli d 訓%阿0 >Aich«rigvd Behavior RigidPin bail R 強 i”初StDp5・ Qiomndl To R41| J 2Z3:17:ar^i Fl icf He p让0-|<9 亠一-lL^> ^r^iphc!& ArnotabcnsiG 2 Mes^gias Na Se-ectiDH ¥Det a -s cf "Re-vciiJte - SrcMind T e Ff«4l]'Bedy □□□□「■0£D 壬D©D 1OD.CU (imm)柑 mid '■ I r - ■ J MV. p ,< ri"i' i 1. J h- -Hl ■- II ■■ Vir^/T iii.ri -^j -In- i| H M '- T ' 订・儿 ,ir ■ ■'■-* n ; .- I - JI ;I ^4 »'■rf hiim接着添加一个Body-Body的旋转副,也就是三角板与行星轮之间的旋转连接。
revolute 。
Body-Boby。
最后就是两个齿轮之间的接触关系设置。
按照经验,在不考虑齿轮间摩擦的情况下,选择frictionless 接触类型。
i!g B rartsient S?rucnfral - Ve<4v>nica- IANSYS MuHiphy^ c?!z lr E J t H Sil、Jh Hr 2球Solve ▼ C||Q 13 •wori◎二十仓◎讯因a Q笨杨□ ▼| h Show Vertices ^Wireframe II Idgc Coloring /▼ X ▼1*1 H *hidcen Arnctfition?Bcxly-Ground 亍Body-Body ▼ 腐Body View% Q Connect CHS ' '(!- {| 4 Contact ▼ Spot WeldOutiinr9| Project~31 Model (M)3 “⑲ Georetry& 彳人Coordnete Systems三/0 Comet tors B • JonX■*• Refute ・G,0urdTo E[39] J /令RSTCUtE • G"Wd TO F[41].4. ” F>:cd ・Ground To A[n] 自加Jomto 2£ A "a诞£} • CocUctsFctonesfi • E|39J To 3 44J z x F*C»HE£S BM TOAgo] •购Me彷t /樹I (B5) •••/^ Inlifll CandtoHs •…AriJywSritrgs ;.../令 8—YdcctY-.宝SduOon (Bb) 了9 Solutton :*^orng如Eau^kntS^ewDet^k of •Fnctionle%^ ・ E[39]To B[44J-ScopM Method G«<xnetiy MtctionContactTwpec —ContKt BocSri T IM get Bodin l)SF«n 86 iW B[M]DHInition卯Scope Mode BehavQf S^ppessed Advanced Formulation InteHace Treottnent FrictionkssManualSymmeticNoFrktionless E|39] To B[44|2C12/12/24 22:18Fr aionl•“ -E|39)ToB|<Mlzws®CHxt NofmdiSrftfne5? Updxc stiff ncs: Pintail Region Ti*ne Step Contreii Pure Pcralty ________ _ Add R^mp ng C. mmPFrynConglledNeverProgiynContfollvdNseSection PhfMjs :…倔枷5Me&soges Cr?p*icr Annotatfons]°2 WsqwNo SelectionA5OX:-00.00 (rnrnj2SMIsGcomctryQnrt P*x"x>、ReoortMetric (mm kq. N, s, mV. mA) Degree之后,connections 定义完全后,就可以对其进行网格划分。
网格划分这里完全采用在之间添加了 joi nts 的基础之上,现在可以施加Joi nt load ,这里我们取太阳轮为主动轮,添加一个Rotatio nalVelocity 的 load 。
最后,个人认为也是最关键的,就是对瞬态分析的参数(时间步)进行设置。
Automatic 不详述。
日:Trarrsient Structural Me^luniizjl fANSVS- h*physicsf孑亀匚onnectiaris :二]…* 新 Joints还]“「幸 Rev D I ute - Ground I D E[3^] 用.A 令 RevolJte - Ground To F[41J 宙…丫 'Q Mix^d ・ Ground To A[4CJ 二;一/臺Joirrts 2田,”"金 ftevolute - F[41] ToB[44]-■J Contacts-v t. F=ric(]onles£ ・ E[39J To E[MI -v X Frictonlees - BM To A [40] Mesh7IQ1 Transient (B5)f Initial CondihJoint - Rotational Ve^odtySolution (86]{丄! Saluti^ri Infermatoor-Equiv^^nt Sti'es^Details of * Analysis Settings*#二Step Ccntrch#Number Of Steps1. ----------------Curre-ntSteo UumlMF L ZCStep End Time0.1 sAuto Time Steppirg6■PpfigFy ____________taf —^3^7 —Initial Time Step25MK^s 「丿Minimunn Time 5trp2,«M3 5 /IMjxjmum Time Ste-p 5.e-(®3 s /Ttrne Integration On- Solver C Q ntrokSolver Type-PrG^nmContr (?ll^dWeak Springs Pr eg ram ControlledLa rge DeflectionC H十Restart Controls+ NcnlinearC^ntrsh+ Output Centre[s* Damping Ce ntre \iiii IT戍户国沪姑£刊<;血-MathegementTT最后的最后,经过一个半小时的计算,得到计算结果。
帮帮帮帮帮。
Outh neS\ project 百 鱼 Model (B4)[+]■■ /血 GecHTietry E- 匚oordinate Svstetns0-' _vs s <e:JR gs。