步进电机功率计算方法!
- 格式:docx
- 大小:176.77 KB
- 文档页数:2
电机功率及用电量计算公式电机功率及用电量计算是工业生产中非常重要的一项工作。
在工业生产中,电机功率的大小直接影响到生产效率和能耗,因此合理计算电机功率及用电量对于降低能耗、提高生产效率具有重要意义。
本文将介绍电机功率及用电量的计算公式及其应用。
一、电机功率的计算公式。
电机功率是指电机在单位时间内所做的功,通常用千瓦(kW)来表示。
电机功率的计算公式为:P = UIcosφ。
其中,P为电机功率,U为电机的电压(伏特),I为电机的电流(安培),cosφ为功率因数。
在实际工作中,电机功率的计算需要根据电机的额定电压、额定电流和功率因数来计算,通常可以通过电机的型号和参数手册来获取相关数据,然后根据上述公式进行计算。
二、用电量的计算公式。
用电量是指电机在单位时间内消耗的电能,通常用千瓦时(kWh)来表示。
用电量的计算公式为:E = P×t。
其中,E为用电量,P为电机的功率(千瓦),t为电机的运行时间(小时)。
在实际工作中,用电量的计算需要根据电机的功率和运行时间来计算,通常可以通过电表或电能表来获取电机的运行时间和消耗的电能,然后根据上述公式进行计算。
三、电机功率及用电量的应用。
1. 生产效率提升。
合理计算电机功率及用电量可以帮助企业提升生产效率。
通过控制电机的功率和运行时间,可以实现对生产设备的精准控制,提高生产效率,降低能耗。
2. 能耗管理。
合理计算电机功率及用电量可以帮助企业进行能耗管理。
通过监控电机的功率和用电量,可以及时发现能耗异常,采取相应的节能措施,降低能耗,降低生产成本。
3. 设备维护。
合理计算电机功率及用电量可以帮助企业进行设备维护。
通过监控电机的功率和用电量,可以及时发现设备运行异常,进行及时维护,延长设备的使用寿命,提高设备的可靠性。
四、结语。
电机功率及用电量的计算是工业生产中非常重要的一项工作,合理计算电机功率及用电量对于降低能耗、提高生产效率具有重要意义。
本文介绍了电机功率及用电量的计算公式及其应用,希望能对工业生产中的能耗管理和设备维护提供一定的参考和帮助。
电机功率的计算公式电机功率是指电机在单位时间内所做的功,通常用瓦特(W)来表示。
电机功率的计算公式是:功率(P)= 电压(V)×电流(I)。
在这个公式中,电压是电机所接收到的电压,单位是伏特(V),电流是电机所消耗的电流,单位是安培(A)。
通过这个公式,我们可以计算出电机的功率,从而了解电机的工作状态和性能。
电机功率的计算公式是基于电学原理和功率的定义推导而来的。
根据电学原理,电压与电流的乘积即为功率,这是由欧姆定律和功率定义公式推导而来的。
因此,电机功率的计算公式是非常基础和重要的公式,它可以帮助我们了解电机的工作状态和性能,对于电机的设计、选择和应用都具有重要的意义。
在实际应用中,我们经常需要根据电机的工作电压和电流来计算电机的功率。
这个公式可以帮助我们了解电机的实际工作情况,从而为电机的设计和应用提供重要的参考依据。
下面我们将详细介绍电机功率计算公式的应用和相关知识。
首先,我们需要了解电机功率计算公式中的电压和电流的含义。
电压是指电机所接收到的电压,它是电机工作的基础,通常由电源提供。
电流是指电机所消耗的电流,它是电机工作时的主要参数,可以反映电机的工作状态和性能。
通过测量电机的电压和电流,我们可以利用功率计算公式来计算电机的功率,从而了解电机的工作情况。
在实际应用中,我们通常需要根据电机的额定电压和额定电流来计算电机的额定功率。
电机的额定电压和额定电流是电机设计时确定的重要参数,它们可以帮助我们了解电机的额定工作状态和性能。
通过电机功率计算公式,我们可以根据电机的额定电压和额定电流来计算电机的额定功率,从而了解电机的额定工作情况。
除了额定功率,我们还可以根据电机的实际工作电压和电流来计算电机的实际功率。
电机的实际工作电压和电流通常会有一定的波动,通过功率计算公式,我们可以根据实际工作电压和电流来计算电机的实际功率,从而了解电机的实际工作情况。
电机功率的计算公式可以帮助我们了解电机的工作状态和性能,对于电机的设计、选择和应用都具有重要的意义。
电机的功率和电流计算公式电机这玩意儿,在咱们生活中那可是无处不在啊!从家里的电风扇到工厂里的大型机器,都离不开电机的功劳。
而要搞明白电机的运行情况,功率和电流的计算公式那可太重要啦!先来说说电机功率的计算。
功率,简单理解就是电机干活儿的能力大小。
电机功率的计算公式是P = UI,这里的P 表示功率,U 是电压,I 呢则是电流。
比如说,一台电机工作时的电压是 220 伏,电流是 5 安,那它的功率就是 220×5 = 1100 瓦。
再讲讲电机电流的计算。
这电流呀,就好比是电机干活儿时“吃”进去的能量。
电机电流的计算公式有好几种,咱先来说说常见的一种,对于单相电机,电流 I = P / (U×cosφ),这里的cosφ 是功率因数。
而对于三相电机,电流 I = P / (√3×U×cosφ)。
给您说个我之前遇到的事儿。
有一次,我去一个小工厂帮忙检修设备。
他们有一台电机老是出问题,运转不顺畅。
我一检查,发现他们根本就没搞清楚这电机的功率和电流应该是多少,供电配置完全不对。
我就按照公式,仔细测量了电压、功率因数这些参数,重新计算了电流,调整了供电设置。
嘿,您猜怎么着,这电机立马就欢快地转起来了,那工厂老板对我是千恩万谢。
咱们接着说电机的事儿。
在实际应用中,电机的功率和电流计算可不能马虎。
如果计算错误,小则电机效率低下,大则可能会损坏电机,造成生产停滞,那损失可就大了。
比如说,要是给电机提供的电流过小,电机就像饿着肚子干活儿的人,没劲儿,转不动;电流过大呢,电机又像吃撑了的人,负担过重,容易发热甚至烧毁。
而且啊,不同类型的电机,功率和电流的计算还有一些细微的差别。
像直流电机、异步电机、同步电机等等,它们的计算公式和参数都有所不同。
这就需要我们根据具体的电机类型,选择正确的公式和参数来进行计算。
还有哦,电机在工作的时候,环境因素也会对功率和电流产生影响。
比如温度过高或者过低,湿度太大,都会让电机的性能发生变化。
步进电机计算公式步进电机是一种将电脉冲信号转换为角位移或线位移的电动机。
它由定子、转子和控制电路组成。
控制电路根据输入的电脉冲信号,使得步进电机按照一定的步进角度进行转动。
步进电机的运动是离散的,每个脉冲信号会使电机转动一定的角度,这个角度称为步距角。
步距角的大小取决于电机的结构和控制方式。
常见的步距角有1.8°、0.9°、0.45°等。
步进电机的转速与输入的脉冲频率有关。
转速可以通过以下公式计算:转速(rpm)= (60 × f) / (n × s)其中,f为脉冲频率,单位为赫兹(Hz);n为每转脉冲数,即电机的步数;s为电机的步距角,单位为度(°)。
例如,一个步进电机每转一周需要200个脉冲,步距角为 1.8°,如果输入的脉冲频率为1000Hz,则该电机的转速为:转速(rpm)= (60 × 1000) / (200 × 1.8) ≈ 166.67 rpm步进电机的转动精度可以通过步进角误差来衡量。
步进角误差是指电机在接收到相同数量的脉冲信号时实际转动的角度与理论步距角之间的差距。
步进角误差可以通过以下公式计算:步进角误差(°)= (实际角度 - 理论角度) / 理论角度× 100%步进电机的转矩与输入的电流有关。
转矩可以通过以下公式计算:转矩(N·m)= I × Kt其中,I为电机的相电流,单位为安培(A);Kt为电机的转矩常数,单位为牛顿·米/安培(N·m/A)。
步进电机广泛应用于各种自动控制系统中,例如数控机床、印刷设备、纺织设备、医疗设备等。
步进电机具有结构简单、控制方便、位置闭环控制等优点,适用于需要高精度定位和速度控制的场合。
总结一下,步进电机的运动是离散的,转速可以通过脉冲频率、每转脉冲数和步距角来计算,转矩可以通过电流和转矩常数来计算。
步进电机的选用计算方法步进电机的选用计算方法步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。
每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。
在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。
一般地说最大静力矩Mjmax大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。
在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。
但细分只能改变其分辨率,不改变其精度。
精度是由电机的固有特性所决定。
选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的.余量,使之最高速连续工作频率能满足机床快速移动的需要。
选择步进电机需要进行以下计算:(1)计算齿轮的减速比根据所要求脉冲当量,齿轮减速比i计算如下:i=(φ.S)/(360.Δ) (1-1) 式中φ ---步进电机的步距角(o/脉冲)S ---丝杆螺距(mm)Δ---(mm/脉冲)(2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。
Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2](1-2)式中Jt ---折算至电机轴上的惯量(Kg.cm.s2)J1、J2 ---齿轮惯量(Kg.cm.s2)Js ----丝杆惯量(Kg.cm.s2) W---工作台重量(N)S ---丝杆螺距(cm)(3)计算电机输出的总力矩MM=Ma+Mf+Mt (1-3)Ma=(Jm+Jt).n/T×1.02×10ˉ2(1-4)式中Ma ---电机启动加速力矩(N.m)Jm、Jt---电机自身惯量与负载惯量(Kg.cm.s2)n---电机所需达到的转速(r/min)T---电机升速时间(s)Mf=(u.W.s)/(2πηi)×10ˉ2(1-5)Mf---导轨摩擦折算至电机的转矩(N.m)u---摩擦系数η---传递效率Mt=(Pt.s)/(2πηi)×10ˉ2(1-6)Mt---切削力折算至电机力矩(N.m)Pt---最大切削力(N)(4)负载起动频率估算。
电机功率计算公式单位电机功率的计算,这可是个相当有趣且实用的话题!咱先来说说电机功率计算公式里的那些单位。
电机功率的计算公式一般是:功率(P)= 扭矩(T)×转速(n)÷9550 。
这里面的单位可有点讲究。
先说扭矩,单位通常是牛·米(N·m)。
想象一下,你在拧一个特别紧的螺丝,那股费劲的劲儿就是扭矩在起作用。
比如说,你用扳手拧螺丝,费了好大的力才转动它,这时候感受到的就是扭矩。
转速呢,单位一般是转每分钟(r/min)。
就像家里的电风扇,扇叶呼呼转,每分钟转的圈数就是转速。
功率的单位通常是瓦特(W)或者千瓦(kW)。
比如说咱们平时用的电灯泡,上面标着 60W ,这就是说它的功率是 60 瓦特。
我记得有一次,我在工厂里帮忙维修一台机器。
那台机器的电机出了点问题,运转不太正常。
师傅让我算一下电机的功率,看看是不是功率不足导致的。
我拿着工具,仔细测量扭矩和转速,心里那个紧张啊,就怕算错了耽误维修进度。
当时手心都出汗了,一边擦汗一边认真记录数据。
最后算出来功率确实不太够,换了个合适功率的电机,机器立马欢快地运转起来,那时候心里别提多有成就感了!在实际应用中,搞清楚这些单位可太重要了。
如果单位搞错了,那计算结果就会差之千里。
比如说,把扭矩的单位弄成千克力·米,或者把转速的单位弄成每秒转数,那算出来的功率肯定是错的。
而且,不同类型的电机,功率计算可能会有一些细微的差别。
比如直流电机和交流电机,它们的计算公式可能会有一些调整,但基本原理还是一样的。
总之,电机功率计算公式里的单位,虽然看起来有点复杂,但只要咱认真对待,多做练习,就一定能掌握得妥妥的。
这样,不管是在学习中还是在实际工作中,遇到电机功率的计算问题,都能轻松应对,不会被这些单位给难住啦!。
步进电机选型表中有部分参数需要计算来得到。
但是实际计算中许多情况我们都无法得到确切的机械参数,因此,这里只给出比较简单的计算方法。
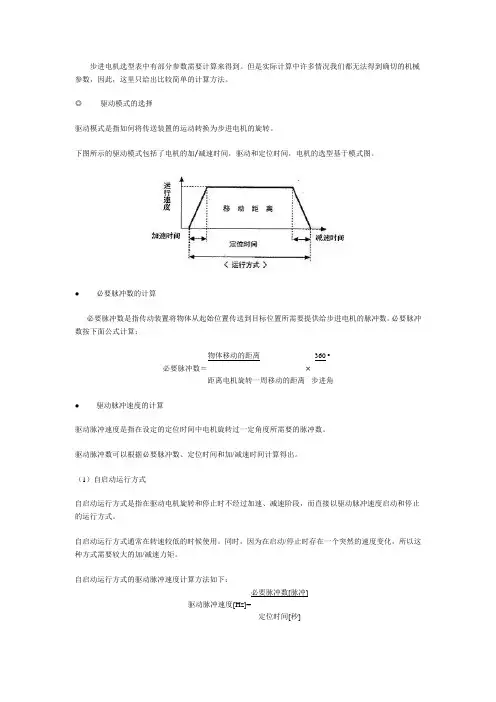
◎驱动模式的选择驱动模式是指如何将传送装置的运动转换为步进电机的旋转。
下图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于模式图。
●必要脉冲数的计算必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供给步进电机的脉冲数。
必要脉冲数按下面公式计算:必要脉冲数=物体移动的距离距离电机旋转一周移动的距离×360 o 步进角●驱动脉冲速度的计算驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数。
驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。
(1)自启动运行方式自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。
自启动运行方式通常在转速较低的时候使用。
同时,因为在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。
自启动运行方式的驱动脉冲速度计算方法如下:驱动脉冲速度[Hz]=必要脉冲数[脉冲]定位时间[秒](2)加/减速运行方式加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后达到正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式。
其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。
加/减速时间需要根据传送距离、速度和定位时间来计算。
在加/减速运行方式中,因为速度变化较小,所以需要的力矩要比自启动方式下的力矩小。
加/减速运行方式下的驱动脉冲速度计算方法如下:必要脉冲数-启动脉冲数[Hz]×加/减速时间[秒]驱动脉冲速度[Hz]=定位时间[秒]-加/减速时间[秒]◎电机力矩的简单计算示例必要的电机力矩=(负载力矩+加/减速力矩)×安全系数●负载力矩的计算(TL)负载力矩是指传送装置上与负载接触部分所受到的摩擦力矩。
伺服电机或步进电机功率计算流程
一、选用电机的大小,主要参照惯量、同时需要核算转矩
1.1伺服电机:电机转子惯量与减速机入力轴惯量比,要求快速的启动、停止,惯量比要小,一般取1:5~1:10(值需要后期修正);对于启动、停止没有什么要求,正常启动的,惯量比可以取到1:20
1.2步进电机取惯量比,要求小于1:10(步进电机没有过载能力)
1.3如果有减速机或是减速比,惯量比换算关系:入力轴与出力轴的惯量关系(入力轴惯量=出力轴的惯量/减速比的平方)
二、伺服步进选型计算流程
1、计算运动部件的惯量
2、计算运动部件的加角速度
3、计算运动部件的正常负载
4、计算运动部件的加速负载
5、加速负载=惯性转矩(惯量*角加速度V/(R*t))+正常负载
三、关于伺服电机选用减速机减速比的问题
1、建议选用小于1:10的减速比(速比越大,价格越贵)
2、如果在选型过程中,根据惯量选型,电机功率在小功率范围之内的(小于1kw),可以不要加减速机
3、对于需要驱动比较大的载荷的工况,如果不加减速机的话,电机选型功率就会偏大,为了降低电机的选型功率,最好加减速比。
电机功率计算公式及实用计算步骤电动机的功率,应根据生产机械所需要的功率来选择,尽量使电动机在额定负载下运行。
选择时应注意以下两点:①如果电动机功率选得过小.就会出现“小马拉大车“现象,造成电动机长期过载.使其绝缘因发热而损坏.甚至电动机被烧毁。
②如果电动机功率选得过大,其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利,而且还会造成电能浪费。
最主要的是所有传动件都会因传递功率过大,造成传动件选型过大,对于设备的投资浪费严重。
以上是我们在非标设备设计中对《电机功率计算》所出现的一些最常见,也是最严重的问题。
我们如何才能对电机功率计算得最为合理,并选择适合的电动机驱动设备呢?大家如果需要学习这方面的计算方法和选型方法,可以通过我们的官网加入学习群进入直播课程和老师进行交流。
详情参见,并下载相关资料。
根据大家在电机功率计算以及选用电机出现的问题,本人总结了以下关于电机功率计算的方法,并整理了一些资料给大家参考!以上是最常用的最终电机功率计算推导公式,但仅公是用上述公式,我们是计算不出准确的电机所需要的功率的,主要原因有以下几点:1、电机在工作过程中,输出转矩和做功分为三个部分,分为启动加速部分、正常工作部分和减速停车部分,而这三部分实际所需的转矩是不一样的。
(具体见下图)通过上图可以看出,设备在启动加速过程中,转矩是最大的。
而这一部分的时间,相对来说也是很短的,比如伺服电机、步进电机的启动很短,都是以豪秒来计算的。
所以这部分转矩是依靠电机的过载能力来启动的,大部分电机都是有短时间的过载能力。
(步进电机除外)见下图:伺服电机运行状态图及参数所以在电机功率计算过程中,至少需要计算设备的两个转矩,第一个是启动加速转矩,第二个是正常负载转矩。
根据计算数据来看电机能不能过载启动设备,如果不行,调大电机功率。
如果需要计算设备启动加速的转矩,就需要运用到计算设备的惯量等一些问题,常见机构的惯量计算方法如下图:如果需要计算到设备的正常负载,就需要运用一些方法计算设备的运行转矩,常见的一些机构转矩计算方式如下图:丝杆运行机构轮式提升机构应用实例讲解:已知:负载重量WA=10kg螺杆螺距BP=20mm螺杆直径BD=20mm螺杆长BL=0.5m机械效率η=0.9摩擦系数μ=0.1负载移动距离0.3m加减速时间ta=td=0.1s匀速时间tb=0.8s静止时间t4=1s联轴器的惯量Jc= 10x10-6 kg.m² .请选择满足负载需求的最小功率伺服电机?1、滚珠丝杆的质量:Bw=ρxV=7.9*10³*π(0.02/2)²*0.5=1.24kg2、负载部分的惯量:JL=JC+JB=JC+BW*BD²/8+WA*BP²/4π²=1.73*10^-4kg.m²3、预选电机若选200W,则JM= 0.14*10^-4kg.m²4、惯量比JL /JM =1.73/0.14=12.3<30倍(若选100W,则JM= 0.14*10^-4kg.m²,比值为33.9>30倍通常对于启动速度没有什么要求的话,可以选到小于30倍的惯量比。
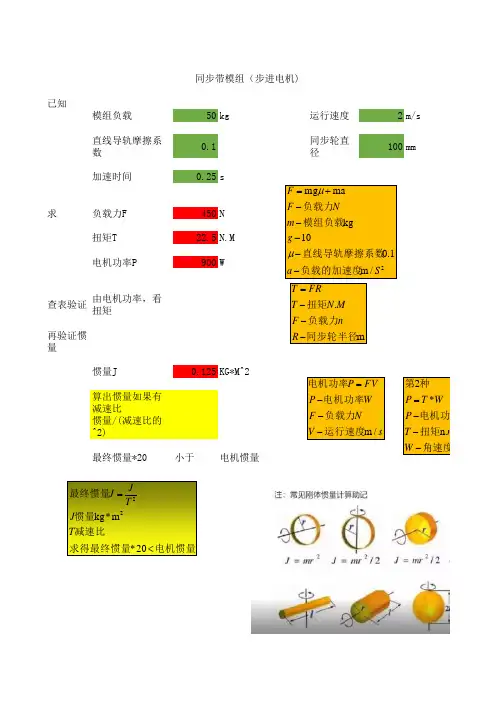
已知模组负载50kg 运行速度2m/s 直线导轨摩擦系数0.1同步轮直径100mm 加速时间0.25s 求负载力F450N 扭矩T22.5N.M 电机功率P 900W 查表验证由电机功率,看扭矩再验证惯量惯量J0.125KG*M^2算出惯量如果有减速比惯量/(减速比的^2)最终惯量*20小于电机惯量同步带模组(步进电机)2/m 1.010kg mamg S a g m N F F 负载的加速度直线导轨摩擦系数模组负载负载力-----+=μμm .同步轮半径负载力扭矩---=R nF MN T FRT s V N F W P FV P /m 运行速度负载力电机功率电机功率---=W m T P W T P .n *2角速度,弧度制扭矩电机功率种第---=电机惯量求得最终惯量减速比惯量最终惯量<=20*m *kg 22T J T J J附件:直线运动物体的惯性惯量J=M(A/2π)^2KG.M^2为导程如果是丝杆,例如一周的长(,同步轮的例如同步轮也可以适用单位移动量(和摩擦力没有关系)物体的重量运动惯量ArArevAMmJAMJ:)2(/mkg.kg)2(22ππ=---=步进转速300-600r/min s m w/rad .角速度,弧度制电机功率。
步进电机的基本参数及基本公式详解虽然很多电子工程师在电机驱动方面大多是以伺服电机为主进行研究和学习,但不可忽略步进电机的重要性,因为在特定场合下,步进电机远比伺服电机更重要,所以了解步进电机的参数及公式是很有必要的。
1、电机固有步距角它表示控制系统每发一个步进脉冲信号,电机所转动的角度。
电机出厂时给出了一个步距角的值,如86BYG250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8° ),这个步距角可以称之为'电机固有步距角’,它不一- 定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。
通常步进电机步距角β的一般计算按下式计算。
β =360°/(Z·m·K)式中β——步进电机的步距角;Z——转子齿数;m——步进电动机的相数;K——控制系数,是拍数与相数的比例系数2、步进电机的相熟是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。
电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72°。
在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己步距角的要求。
如果使用细分驱动器,则'相数’将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。
3、保持转矩(HOLDING TORQUE)是指步进电机通电但没有转动时,定子锁住转子的力矩。
它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。
由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。
比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N·m的步进电机。
步进电机速率计算公式
步进电机速率计算公式为:转速(RPM)= f θb /6°。
其中,f表示电源频率,θb表示步距角。
步距角θb由动行拍数m和电动机相数m决定,通常等于相数或相数的整数倍。
此外,步进电机的运动可由角速度w、步距角α、运行速度n和持续转矩T 等参数表示,具体公式如下:
1. 角速度w = 2πf/Ns
2. 步距角α = 360/Ns
3. 运行速度n= fNs/60
4. 持续转矩T = KtI
其中,w表示角速度,f表示脉冲频率,Ns表示步数,α表示步距角,n表示运行速度,T表示持续转矩,Kt为电机的扭矩系数,I为电机的电流。
这些公式和参数是进行步进电机控制与应用的前提。
更多详细信息建议查阅电机相关书籍或咨询电机领域技术人员获取。
两相步进电机功率计算摘要:两相步进电机功率计算I.引言A.两相步进电机的概念B.两相步进电机的应用领域II.两相步进电机的结构和工作原理A.结构特点B.工作原理III.两相步进电机的功率计算A.公式推导B.参数解读C.计算实例IV.两相步进电机的性能影响因素A.电压和电流B.转矩和力矩C.尺寸和重量V.两相步进电机的选型和应用A.选型要点B.应用场景VI.结论正文:两相步进电机是一种基于电磁原理,将电脉冲信号转换为精确旋转运动的电机。
广泛应用于需要精确控制速度和位置的自动化设备中,例如数控机床、机器人、物流设备等。
两相步进电机的结构主要由定子和转子组成。
定子上有两个绕组,分别为A 相和B 相,通过交替通电产生旋转磁场。
转子上有两个齿轮,与定子上的绕组配合,实现旋转运动。
当A 相通电时,转子逆时针旋转;当B 相通电时,转子顺时针旋转。
通过控制A 相和B 相的通电顺序和时间,可以实现精确的速度和位置控制。
在计算两相步进电机的功率时,需要考虑电机的电压、电流、转矩和力矩等参数。
一般来说,电机的功率P 与电压U、电流I 和转矩T 之间存在关系:P = U * I * T。
根据这个公式,可以计算出电机的功率。
两相步进电机的性能受多种因素影响,如电压和电流大小、转矩和力矩的平衡、电机的尺寸和重量等。
在实际应用中,需要根据设备的需求,合理选择电机的参数,以满足性能要求。
在选择两相步进电机时,需要考虑电机的负载能力、速度范围、控制方式等因素。
同时,还要注意电机的尺寸、重量、散热等因素,以便于安装和使用。
总之,两相步进电机在自动化设备中具有广泛的应用前景。
步进电机力矩计算公式(功率换算公式)步进电机选型之:步进电机力矩计算方法(功率换算方法)步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。
每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
很多用户在选型时不知道该选择多大的步进电机,不清楚步进电机速度和力矩的关系,有的用户需要用步进电机替代交流电机或者直流电机时问到该选用多少瓦的步进电机(其实步进电机是不讲功率的),甚至有用户直接问到“我要带50公斤的物体,该用多大的步进电机?”针对不同的设备,不同的传动方式,不同的负载和速度,甚至不同的加速度,启动速度等因素,所需要适配的步进电机都会有所不同,运控公司无法针对每个公司不同的机械设计都做出精确的计算,现在把步进电机选型的科学计算方法给用户分享。
步进电机力矩计算公式(功率换算公式)下载选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可*。
在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。
一般地说最大静力矩Mjmax大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。
在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。
但细分只能改变其分辨率,不改变其精度。
精度是由电机的固有特性所决定。
选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
步进电机功率计算:
力矩与功率换算
步进电机一般在较大范围内调速使用、其功率是变化的,一般只用力矩来衡量,力矩与功率换算如下:
P= Ω·M
Ω=2π·n/60
P=2πnM/60
其P为功率单位为瓦,Ω为每秒角速度,单位为弧度,n为每分钟转速,M为力矩单位为牛顿·米
P=2πfM/400(半步工作)其中f为每秒脉冲数(简称PPS)
步进电机的特点就是随着转速的提高,力矩急剧下降,两者的关系是非线性的。
所以对于一台步进电机,不同转速下输出的功率是不同的。
你可以根据公式P=2πnM/60 算出这台电机任意转速下的功率。