华南理工大学自动控制原理习题集答案与真题答案
- 格式:pdf
- 大小:17.96 MB
- 文档页数:22
自动控制原理随堂练习第一章绪论答题: A. B. C. D.答题: A. B. C. D.答题: A. B. C. D.答题: A. B. C. D.答题: A. B. C. D.答题: A. B. C. D.A. B. C.A. B. C.A. B. C.A. B. C.答题:对. 错答题:对. 错答题: A. B. C. D. 答题: A. B. C. D. 答题: A. B. C. D. 答题: A. B. C. D.某系统的传递函数为,该传递函数有(答题: A. B. C. D.某典型环节的传递函数是,则该环节是(答题: A. B. C. D.已知系统的单位脉冲响应函数是,则系统的传递函数是(A. B. C. D.答题: A. B. C. D.答题: A. B. C. D.某系统的传递函数是,则该可看成由(答题: A. B. C. D.答题: A. B. C. D. 答题: A. B. C. D. 答题:对. 错答题:对. 错答题:对. 错.闭环极点为的系统.闭环特征方程为的系统.阶跃响应为的系统.脉冲响应为的系统答题: A. B. C. D..最大超调量 D答题: A. B. C. D.已知二阶系统的传递函数是,则该系统属于答题: A. B. C. D.答题: A. B. C. D.已知系统的开环传递函数为,则其型别为(答题: A. B. C. D.已知系统的开环传递函数为,则该系统的开环增益为答题: A. B. C. D.若某负反馈控制系统的开环传递函数为,则该系统的闭环特征方程为. B.. D答题: A. B. C. D.某单位反馈系统的开环传递函数为,. B. C. D.答题: A. B. C. D.答题: A. B. C. D.系统在作用下的稳态误差,说明(.系统型别 B答题: A. B. C. D.答题: A. B. C. D. 答题: A. B. C. D. 答题: A. B. C. D..最大超调量 DA. B. C.A. B. C.16.特征方程最靠近虚轴的根和虚轴的距离表示系统的稳定裕度,越大则系统的稳定性越低。
第一章绪论当前页有10题,你已做10题,已提交10题,其中答对10题。
1. 闭环系统的特点不包含下列哪项()。
A •负反馈B •控制精度较低C .可减少或消除偏差D .适应性好答题:' A. '* B. ' C. D.(已提交)参考答案:B问题解析:2. 系统采用负反馈形式连接后,则()。
A•一定能使闭环系统稳定B •系统动态性能一定会提高C •一定能使干扰引起的误差逐渐减小,最后完全消除D •需要调整系统的结构参数,才能改善系统性能答题:A.釦” [2|c. ^M D.(已提交)参考答案:D问题解析:3. 自动控制系统中测量被控量并进行信号转换,再反馈到输入端的元件是()。
A •比较元件B •校正元件C •测量反馈元件D •执行元件答题: A. B. * C. D.(已提交)参考答案:C问题解析:4. 火炮自动瞄准系统的输入信号是任意函数,这就要求被控量高精度地跟随给定值变化,这种控制系统叫()。
A. 恒值调节系统B.离散系统C.随动控制系统D.数字控制系统答题:匚]A. B. * C.「I ID.(已提交)参考答案:C问题解析:5. 随动系统对()要求较高。
A. 快速性B.稳定性C.准确性D.振荡次数答题:f A. ' B. ' C. D.(已提交)参考答案:A问题解析:6. 衡量系统稳态精度的重要指标时()A •稳定性B •快速性C •准确性D •安全性答题:• A. B. C. D.(已提交)参考答案:C问题解析:7. 自动控制系统的主要特征是()。
A •在结构上具有负反馈通路,以求得偏差信号B .由偏差产生控制作用以便纠正偏差C •系统开环D .控制的目的是减少或消除偏差答题:# A. * B. C. * D.(已提交)参考答案:ABD问题解析:8. 自动控制系统按照不同的分类原则有不同的分类结果,下列系统哪些是按照同一原则进行分类的()。
A •连续系统B •程序控制系统C •恒值控制系统D •随动系统答题: A.庁I B. C.二I D.(已提交)参考答案:BCD问题解析:9. 自动控制系统按描述元件的动态方程分()。
第一章绪论1-1 试比较开环控制系统和闭环控制系统的优弊端.解答: 1 开环系统(1)长处 :构造简单,成本低,工作稳固。
用于系统输入信号及扰动作用能早先知道时,可获得满意的成效。
(2)弊端:不可以自动调理被控量的偏差。
所以系统元器件参数变化,外来未知扰动存在时,控制精度差。
2闭环系统⑴长处:不论因为扰乱或因为系统自己构造参数变化所惹起的被控量偏离给定值,都会产生控制作用去消除此偏差,所以控制精度较高。
它是一种按偏差调理的控制系统。
在实质中应用宽泛。
⑵弊端:主要弊端是被控量可能出现颠簸,严重时系统没法工作。
1-2什么叫反应?为何闭环控制系统常采纳负反应?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反应。
闭环控制系统常采纳负反应。
由1-1 中的描绘的闭环系统的长处所证明。
比如,一个温度控制系统经过热电阻(或热电偶)检测出目前炉子的温度,再与温度值对比较,去控制加热系统,以达到设定值。
1-3试判断以下微分方程所描绘的系统属于何种种类(线性,非线性,定常,时变)?2 d 2 y(t)3 dy(t ) 4y(t ) 5 du (t ) 6u(t )(1)dt 2 dt dt(2) y(t ) 2 u(t)(3)t dy(t) 2 y(t) 4 du(t) u(t ) dt dtdy (t )u(t )sin t2 y(t )(4)dtd 2 y(t)y(t )dy (t ) (5)dt 2 2 y(t ) 3u(t )dt(6)dy (t ) y 2 (t) 2u(t ) dty(t ) 2u(t ) 3du (t )5 u(t) dt(7)dt解答: (1)线性定常(2)非线性定常 (3)线性时变(4)线性时变(5)非线性定常(6)非线性定常(7)线性定常1-4 如图 1-4 是水位自动控制系统的表示图, 图中 Q1,Q2 分别为进水流量和出水流量。
控制的目的是保持水位为必定的高度。
自动控制原理习题及解答1. 引言自动控制原理是控制工程中最基础的一门课程,是研究系统的建模、分析和设计的基础。
通过习题的练习和解答,可以加深对自动控制原理的理解和掌握。
本文档将提供一些常见的自动控制原理习题及其解答,希望对学习者有所帮助。
2. 习题2.1 系统建模习题1:一个质量为m的弹簧振子的运动方程可以表示为:$$m\\frac{d^2x(t)}{dt^2} + c\\frac{dx(t)}{dt} + kx(t) = 0$$其中,m(m)为振子的位移,m为阻尼系数,m为弹性系数。
请利用拉普拉斯变换求解该系统的传递函数。
解答:对原方程两边进行拉普拉斯变换得:mm2m(m)+mmm(m)+mm(m)=0整理后可得传递函数:$$\\frac{X(s)}{F(s)} = \\frac{1}{ms^2 + cs + k}$$其中,m(m)为输出的拉普拉斯变换,m(m)为输入的拉普拉斯变换。
2.2 系统分析习题2:有一个开环传递函数为$G(s) =\\frac{3}{s(s+2)(s+5)}$的系统,求该系统的阻尼比和自然频率。
解答:该系统的传递函数可以表示为:$$G(s) = \\frac{3}{s(s+2)(s+5)}$$根据传递函数的形式可以得知,该系统是一个三阶系统,有三个极点。
通过对传递函数进行因式分解可以得到:$$G(s) = \\frac{A}{s} + \\frac{B}{s+2} + \\frac{C}{s+5}$$将上述表达式通分并整理后可得:$$G(s) = \\frac{3s^2 + 16s + 5}{s(s+2)(s+5)}$$通过对比系数可以得到:$$A = 1, B = -\\frac{2}{3}, C = \\frac{5}{3}$$根据阻尼比和自然频率的定义,可以得到:$$\\zeta = \\frac{c}{2\\sqrt{mk}}, \\omega_n =\\sqrt{\\frac{k}{m}}$$其中,m为系统的阻尼系数,m为系统的弹性系数,m为系统的质量。
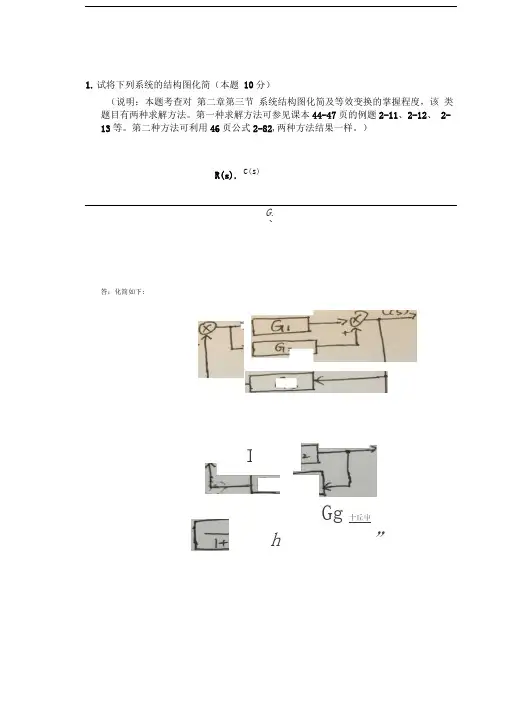
1.试将下列系统的结构图化简(本题10分)(说明:本题考查对第二章第三节系统结构图化简及等效变换的掌握程度,该类题目有两种求解方法。
第一种求解方法可参见课本44-47页的例题2-11、2-12、2-13等。
第二种方法可利用46页公式2-82,两种方法结果一样。
)C(s)G.-L答:化简如下:Gg十丘屮h ”R(s).II『十EuACG茎十牛〉2.已知单位反馈系统的开环传递函数如下,试确定使系统稳定的开环放大系数K的取值范围。
(本题10分)1)GK(s)= s(s + 2)(s+4)(说明:本题考查对第三章第一节劳斯稳定判据的理解和应用,可参见课本67 页例题3-6。
一样的求解思路)所卜L o^k zV/3.----------------------------------------------------------------- 已知单位负反馈系统开环传递函数G(s) = -------------------------------------- 10----- 。
(本题20分)(s+4)(5s+1)试判断该系统属于几型系统。
试求在输入信号r(t)=2+4t+5t2作用下,系统的稳态误差是多少。
2)系统的开环放大系数K是多少?3)试判断该系统是否稳定。
4)k1)(说明:本题考查对第三章第六节 稳态误差相关知识的理解和计算。
可参见课 本105页表3-6的总结及例题3-16。
) 答: (1)由系统开环函数可知系统为I 型系统 10 2. 5⑵由 G (S )= s(s +4)( 5s +1) s ( 0.25s +1)( 5s +1) 可知向前积分环节有一个,系统是I 型系统,且开环放大系数 K= 2.5。
廉专车伎_統萇掾竝曲占强L 曲敕习从茨< 闭条彳怎&丛箱紅舟省方:p(0二g <十沙十卜卄二© 苗京卜彳堆获和蜒耳竦淤乡瓦2 条数£乏刖X 圮 更為文赣 _~ 山)由3灵r 条流勺I 理条轨,且K 二平放約君 缶t 的,亡习y 甘传¥作用佩怂k 愆%柑1为 Q上,g ,芒攵視扳乡{性逐机埒翟审\爰猊说<x 爲专- 么(化)二Q +J —4.某二阶系统的结构图如图(a)所示,该系统的单位阶跃响应如图(b)所示。
第一章绪论当前页有10题,你已做10题,已提交10题,其中答对10题。
1.闭环系统的特点不包含下列哪项()。
A.负反馈B.控制精度较低C.可减少或消除偏差D.适应性好参考答案: B2.系统采用负反馈形式连接后,则( )。
A.一定能使闭环系统稳定B.系统动态性能一定会提高C.一定能使干扰引起的误差逐渐减小,最后完全消除D.需要调整系统的结构参数,才能改善系统性能参考答案: D3.自动控制系统中测量被控量并进行信号转换,再反馈到输入端的元件是()。
A.比较元件B.校正元件C.测量反馈元件D.执行元件参考答案: C4.火炮自动瞄准系统的输入信号是任意函数,这就要求被控量高精度地跟随给定值变化,这种控制系统叫()。
A.恒值调节系统B.离散系统C.随动控制系统D.数字控制系统参考答案: C5.随动系统对()要求较高。
A.快速性B.稳定性C.准确性D.振荡次数参考答案: A6.衡量系统稳态精度的重要指标时()A.稳定性B.快速性C.准确性D.安全性参考答案: C7.自动控制系统的主要特征是()。
A.在结构上具有负反馈通路,以求得偏差信号B.由偏差产生控制作用以便纠正偏差C.系统开环D.控制的目的是减少或消除偏差参考答案:ABD8.自动控制系统按照不同的分类原则有不同的分类结果,下列系统哪些是按照同一原则进行分类的()。
A.连续系统B.程序控制系统C.恒值控制系统D.随动系统参考答案:BCD9.自动控制系统按描述元件的动态方程分()。
A.随动系统B.恒值控制系统C.线性系统D.非线性系统参考答案:CD10.自动控制系统性能的基本要求是()。
A.稳定性B.快速性C.准确性D.安全性参考答案:ABC第一章绪论当前页有2题,你已做2题,已提交2题,其中答对2题。
11.人工控制与自动控制系统最大的区别在于控制过程中是否有人参与。
()参考答案:对12.开环控制系统与闭环控制系统最大的区别在于前者引入了反馈环节。
()参考答案:错第二章控制系统的教学模型当前页有10题,你已做10题,已提交10题,其中答对10题。
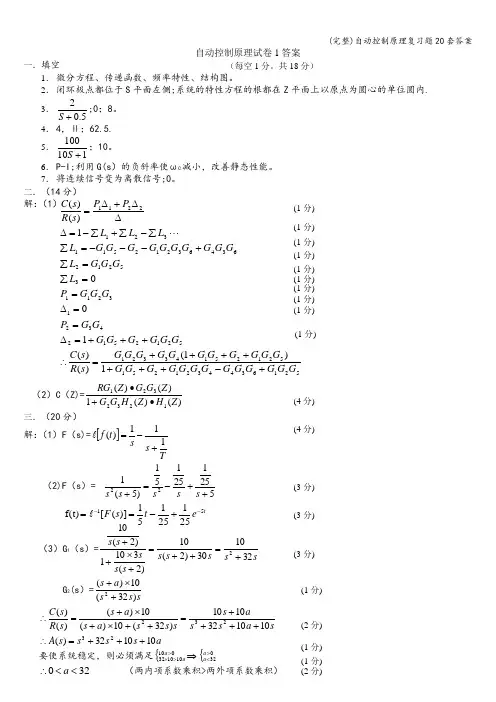
自动控制原理试卷1答案一.填空 1. 微分方程、传递函数、频率特性、结构图。
2. 闭环极点都位于S 平面左侧;系统的特性方程的根都在Z 平面上以原点为圆心的单位圆内.3. 5.02+S ;0;8。
4. 4,Ⅱ;62.5.5. 110100+S ;10。
6. P-I;利用G(s )的负斜率使ωC 减小,改善静态性能。
7. 将连续信号变为离散信号;0。
二.(14分) 解:(1)(2)C (Z)=)()(1)()(1232321Z H Z H G G Z G G Z RG •+•三.(20分)解:(1)F (s)=[]T s st f 111)(+-=(2)F (s )=525125151)5(122++-=+s s ss s(3)G 1(s )=s s s s s s s s s s 321030)2(10)2(3101)2(102+=++=+⨯++G 2(s )=ss s a s )32(10)(2+⨯+sa s s a s s s s a s a s s R s C 1010321010)32(10)(10)()()(232++++=++⨯+⨯+=∴ a s s s s A 101032)(23+++=∴ 要使系统稳定,则必须满足{{032010101032><>>⨯⇒a a a a320<<∴a (两内项系数乘积>两外项系数乘积)521634432125152125143321521251243213211352126346321251132122111)1()()(1001)()(G G G G G G G G G G G G G G G G G G G G G G G G s R s C G G G G G G G G P G G G P L G G G L G G G G G G G G G G L L L L P P s R s C +-+++++++=∴+++=∆==∆==∑=∑+---=∑∑-∑+∑-=∆∆∆+∆= t e t s F 5125125151)]([f(t)--+-== (1分) (1分) (1分) (1分) (1分) (1分) (1分) (1分) (1分)(1分)(4分) (4分)(3分) (3分)(3分)(1分)(2分) (1分)(1分) (2分)(每空1分。
自动控制原理习题及其解答第一章(略) 第二章例2-1 弹簧,阻尼器串并联系统如图2-1示,系统为无质量模型,试建立系统的运动方程。
解:(1) 设输入为y r ,输出为y 0。
弹簧与阻尼器并联平行移动。
(2) 列写原始方程式,由于无质量按受力平衡方程,各处任何时刻,均满足∑=0F ,则对于A 点有021=-+K K f F F F其中,F f 为阻尼摩擦力,F K 1,F K 2为弹性恢复力。
(3) 写中间变量关系式220110)()(y K F Y Y K F dty y d f F K r K r f =-=-⋅=(4) 消中间变量得 020110y K y K y K dtdy f dt dy f r r=-+- (5) 化标准形 r r Ky dtdyT y dt dy T +=+00 其中:215K K T +=为时间常数,单位[秒]。
211K K K K +=为传递函数,无量纲。
例2-2 已知单摆系统的运动如图2-2示。
(1) 写出运动方程式 (2) 求取线性化方程 解:(1)设输入外作用力为零,输出为摆角θ ,摆球质量为m 。
(2)由牛顿定律写原始方程。
h mg dtd l m --=θθsin )(22其中,l 为摆长,l θ 为运动弧长,h 为空气阻力。
(3)写中间变量关系式)(dtd lh θα= 式中,α为空气阻力系数dtd l θ为运动线速度。
(4)消中间变量得运动方程式0sin 22=++θθθmg dt d al dtd ml (2-1)此方程为二阶非线性齐次方程。
(5)线性化由前可知,在θ =0的附近,非线性函数sin θ ≈θ ,故代入式(2-1)可得线性化方程为022=++θθθmg dt d al dtd ml 例2-3 已知机械旋转系统如图2-3所示,试列出系统运动方程。
解:(1)设输入量作用力矩M f ,输出为旋转角速度ω 。
(2)列写运动方程式f M f dtd J+-=ωω式中, f ω为阻尼力矩,其大小与转速成正比。