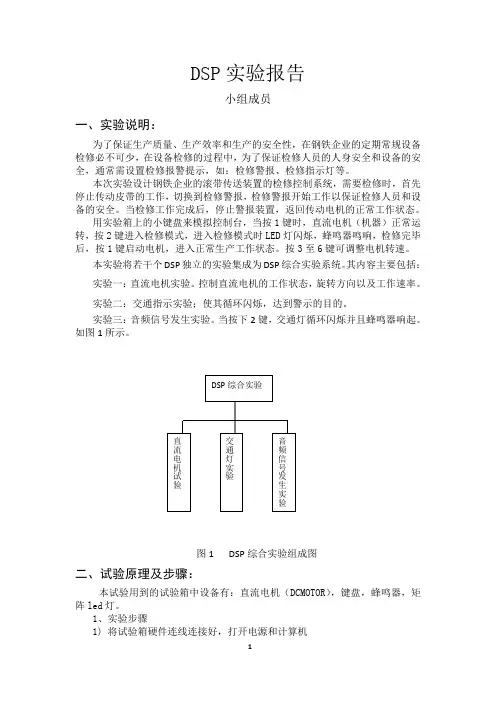
实验DSP直流电机控制实验
- 格式:doc
- 大小:120.00 KB
- 文档页数:14
直流无刷电机实验一.实验目的1.了解直流无刷电机的运行原理2.掌握直流无刷电机的DSP控制。
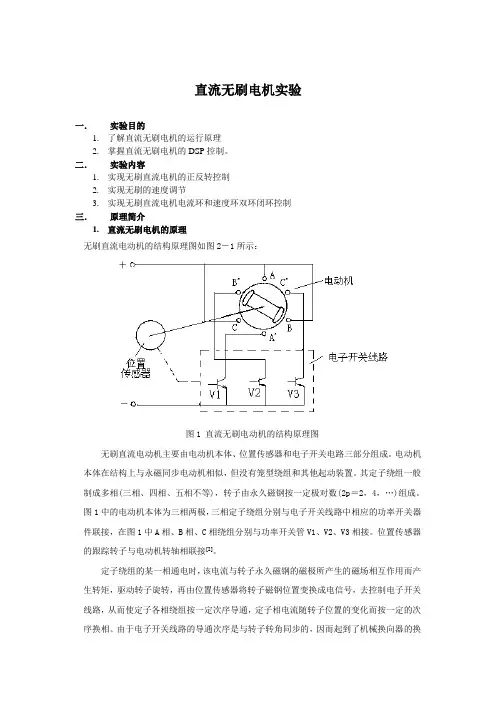
二.实验内容1.实现无刷直流电机的正反转控制2.实现无刷的速度调节3.实现无刷直流电机电流环和速度环双环闭环控制三.原理简介1.直流无刷电机的原理无刷直流电动机的结构原理图如图2-1所示:图1 直流无刷电动机的结构原理图无刷直流电动机主要由电动机本体、位置传感器和电子开关电路三部分组成。
电动机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。
其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。
图1中的电动机本体为三相两极,三相定子绕组分别与电子开关线路中相应的功率开关器件联接,在图1中A相、B相、C相绕组分别与功率开关管V1、V2、V3相接。
位置传感器的跟踪转子与电动机转轴相联接[2]。
定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。
由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。
所以,所谓直流无刷电动机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电动机以及位量传感器三者组成的“电动机系统”。
其原理框图如图2所示。
图2 直流无刷电动机的原理框图2. 直流无刷电机的控制直流无刷电机的控制基本上类似于直流有刷电机的控制(PWM 调制),但由于无刷直流电机用电子换向器取代了机械电刷,所以无刷直流电机除了在控制各相电枢电流的同时还用对电子换向器进行控制。
在无刷直流电机的运行过程中,霍尔位置传感器不断检测电机当前位置,控制器根据当前位置信息来判断下一个电子换向器的导通时序。
如图3所示H1H3ANCBNCBNA CNAH2CNBANB AZXCyWBuV旋转方向反向图1 电子换向器的工作原理图中H1、H2和H3分别表示霍尔位置传感器的信号,H1的有效期为X 轴到u 轴的正半周,H2的有效器为V轴到y轴的正半周,H3的有效期为W轴到z轴的正半周,有效是霍尔对应的信号为1。
一、实训目的本次直流电机控制实训旨在使学生掌握直流电机的基本原理、控制方法及其在实际应用中的操作技能。
通过实训,学生能够了解直流电机的结构、工作原理,学习PWM(脉宽调制)技术、单片机控制等现代电机控制技术,并能够独立完成直流电机的控制实验,提高动手能力和工程实践能力。
二、实训内容1. 直流电机基本原理学习首先,对直流电机的基本结构和工作原理进行了学习。
直流电机主要由转子、定子、电刷、换向器和励磁绕组等部分组成。
在了解这些基本组成部分的基础上,进一步学习了直流电机的转矩、转速与电压、电流之间的关系,以及直流电机的启动、制动和调速方法。
2. PWM技术学习PWM技术是现代电机控制中的重要技术之一。
通过学习PWM技术,了解了PWM信号的产生原理、特点及其在电机控制中的应用。
同时,学习了PWM控制电路的设计和调试方法。
3. 单片机控制学习单片机是现代电机控制系统的核心控制器。
通过学习单片机的基本原理、编程方法和接口技术,掌握了如何使用单片机控制直流电机的转速和转向。
4. 实验操作在实验过程中,按照以下步骤进行操作:(1)搭建实验电路:根据实验要求,连接直流电机、PWM控制器和单片机等元器件,搭建完整的实验电路。
(2)编写程序:使用C语言编写单片机控制程序,实现直流电机的转速和转向控制。
(3)调试程序:通过示波器等工具观察PWM信号和电机运行状态,对程序进行调试和优化。
(4)测试实验效果:观察电机转速和转向是否符合预期,验证实验效果。
三、实验结果与分析1. 转速控制实验在转速控制实验中,通过调整PWM信号的占空比,实现了直流电机的无级调速。
实验结果表明,随着PWM占空比的增大,电机转速逐渐提高;随着PWM占空比的减小,电机转速逐渐降低。
2. 转向控制实验在转向控制实验中,通过改变PWM信号的极性,实现了直流电机的正反转。
实验结果表明,当PWM信号正负极性相反时,电机转向相反。
3. 实验结果分析通过本次实训,掌握了直流电机的基本原理、PWM技术和单片机控制方法。
利用DSP控制直流无刷电机直流无刷电机(Brushless DC Motor,简称BLDC)由于其高效、高转速、大扭矩和低噪音等特性而被广泛应用于各种领域。
要控制BLDC进行转速调节、位置控制等,需要使用数字信号处理器(Digital Signal Processor,简称DSP)来实现。
本文将详细介绍如何利用DSP控制直流无刷电机。
一、直流无刷电机介绍直流无刷电机由转子和定子组成,电机可通过电子调速控制技术实现闭环控制,即通过检测电流、电压、角度等参数来实现控制。
相较于传统的可调电阻电调速和功率电子器件调速,无刷电机控制方式更为精确,可控性更高,并且在减小电气噪声的同时大大提高了效率。
二、直流无刷电机的控制方式直流无刷电机的控制方式可以分为三种:感应式、霍尔传感器控制、反电动势检测控制。
其中,感应式控制方式较为简单,但其准确性和鲁棒性较差;霍尔传感器控制方式使用霍尔元件检测转子位置,可以获得更高的准确性和鲁棒性;反电动势检测控制方式通过检测转子的反电动势来确定位置,具有简化硬件和准确性高等优点。
三、DSP控制直流无刷电机利用DSP控制直流无刷电机需要进行以下几个步骤:1. 设置DSP的GPIO口并输入代码:用GPIO口连接电机,可根据需要设置GPIO管脚的中断、状态和其他属性,并输入代码到DSP中。
2. 制作电机转速控制器:通过编写参考电路和硬件控制程序来制作电机转速控制器,代码需要根据控制方式进行适当的修改。
3. 编写电机控制程序:根据转速调节、位置控制等的需求,编写相关的电机控制程序。
基本步骤包括:初始化电机控制器、设定控制参数、检测电机状态、执行电机控制指令等。
4. 测试和优化:根据测试结果优化电机控制程序,以达到最佳效果。
在测试过程中可以使用示波器、逻辑分析仪等工具进行分析。
四、DSP控制直流无刷电机的优点1. 高精度DSP能够提供高精度的控制,可在微秒级的时间内执行多种运算,实现高速、高精度的控制。
《DSP无刷直流电机控制器的设计》篇一一、引言随着现代工业的快速发展,电机控制技术已成为众多领域的关键技术之一。
无刷直流电机(BLDC)以其高效、低噪音、长寿命等特点在众多应用领域中崭露头角。
为了实现精确、稳定的电机控制,本文提出了一种基于DSP(数字信号处理器)的无刷直流电机控制器设计方法。
二、系统设计概述本设计采用DSP作为核心控制器,通过软件算法实现对无刷直流电机的精确控制。
系统主要由DSP控制器、电机驱动电路、传感器电路、电源电路等部分组成。
其中,DSP控制器负责接收传感器信号,进行算法处理后输出控制信号,驱动电机进行工作。
三、DSP控制器设计DSP控制器是本设计的核心部分,其性能直接影响到电机的控制效果。
在DSP选择上,我们应考虑处理速度、功耗、成本等因素,选择适合的DSP芯片。
DSP控制器的主要功能包括:1. 接收传感器信号:通过ADC(模数转换器)将传感器信号转换为数字信号,供DSP处理。
2. 算法处理:根据传感器信号,通过软件算法计算出电机的控制参数,如PWM(脉宽调制)信号的占空比等。
3. 输出控制信号:将计算出的控制参数通过PWM模块输出为控制信号,驱动电机进行工作。
四、电机驱动电路设计电机驱动电路是连接DSP控制器和电机的桥梁,其性能直接影响到电机的运行效果。
驱动电路应具备较高的驱动能力和较低的功耗。
同时,为了保护电机和控制器,驱动电路还应具备过流、过压等保护功能。
五、传感器电路设计传感器电路用于检测电机的运行状态,为DSP控制器提供反馈信号。
常见的传感器包括电流传感器、速度传感器等。
传感器电路应具备较高的精度和较低的噪声,以保证反馈信号的准确性。
六、电源电路设计电源电路为整个系统提供稳定的电源供应。
在设计中,应考虑电源的稳定性、效率、抗干扰能力等因素。
同时,为了降低系统的功耗,应采用低功耗的电源管理策略。
七、软件设计软件设计是DSP无刷直流电机控制器的关键部分。
在软件设计中,应采用合适的算法实现电机的精确控制。
实验二直流电机控制一、实验目的1.了解直流电机控制原理。
2.学习单片机控制直流电机的编程方法。
3.了解单片机控制外部设备的常用电路。
二、实验原理直流电机的转动方向是由电压的正负来控制的,电压为正时正转,电压为负则反转。
直流电机的转速是由控制脉冲的幅度或占空比来决定的,在电压允许范围内,控制电压越高或正向占空比越大,转速越快,反之则越慢。
本实验电机的控制电路是由单片机控制D/A转换器0832,在D/A的输出端辅以必要的信号调理电路产生-8V到+8V的电压来实现的,见图2-1所示。
电机的测速电路是由安装在电机转盘上的小磁芯,通过霍尔元件感应电机的转速,见图2-2所示,用单片机控制8255 读回感应脉冲,从而测算出电机的转速。
图2-1 DA转换电路图2-2 电机与测速电路原理图三、程序流程图图2-3四、实验任务与要求1、根据实验电路、编写程序、驱动直流电机运转。
2、电机运转方式为正向快转、慢转、停止、反向快转、慢转。
3、用实验箱上的数码管将电机的运转方式显示出来。
4、编制程序,利用P3.4/P3.5及霍尔元件测算出电机的转速。
(选做)五、实验方法与步骤1、将0832的CS连至系统地址CS1、KEY/LED连至系统地址CSO,拨动开关K0、K1、K2、K3、K4分别接到P1.0~P1.4以实现4种不同的电机运转方式的控制(逻辑开关K1~K4电路图如图2-4所示):图2-4 逻辑开关电路state1: 当K0为0,其他拨动开关为1时,电机正向快转,同时让数码管显示1来表示电机正向快转;state2: 当K1为0,其他拨动开关为1时,电机正向慢转,同时让数码管显示2来表示电机正向慢转;state3: 当K2为0,其他拨动开关为1时,电机停止,同时让数码管显示0来表示电机停转;state4: 当K3为0,其他拨动开关为1时,电机反向慢转,同时让数码管显示3来表示电机反向慢转;state5: 当K4为0,其他拨动开关为1时,电机反向快转,同时让数码管显示4来表示电机反向快转;运行程序、观察电机的运转状态。
《DSP无刷直流电机控制器的设计》篇一一、引言随着科技的不断发展,无刷直流电机因其高效、稳定、低噪音等优点,在工业、航空、医疗等领域得到了广泛应用。
为了更好地控制无刷直流电机,DSP(数字信号处理器)无刷直流电机控制器应运而生。
本文将详细介绍DSP无刷直流电机控制器的设计原理、方法及优势。
二、DSP无刷直流电机控制器的基本原理DSP无刷直流电机控制器是一种基于DSP技术的电机控制器,通过控制电机的电流、电压等参数,实现对无刷直流电机的精确控制。
其基本原理包括电机驱动、信号采集、控制算法和通信接口等部分。
1. 电机驱动:DSP无刷直流电机控制器通过驱动电路,将电源的直流电能转换为电机的机械能,实现电机的运动。
2. 信号采集:控制器通过传感器采集电机的电流、电压、速度等信号,为控制算法提供必要的输入。
3. 控制算法:DSP无刷直流电机控制器采用先进的控制算法,如PID(比例-积分-微分)控制、模糊控制等,实现对电机的精确控制。
4. 通信接口:控制器具有多种通信接口,如CAN、RS485等,方便与上位机或其他设备进行数据交换。
三、DSP无刷直流电机控制器的设计方法DSP无刷直流电机控制器的设计主要包括硬件设计和软件设计两部分。
1. 硬件设计:(1)主控芯片选择:选择性能稳定、处理速度快的DSP芯片作为主控芯片。
(2)电源电路设计:设计稳定的电源电路,为控制器提供可靠的电源。
(3)驱动电路设计:设计合理的驱动电路,实现电机的高效驱动。
(4)传感器接口设计:设计传感器接口电路,实现信号的采集与传输。
(5)通信接口设计:根据需要设计相应的通信接口电路。
2. 软件设计:(1)操作系统选择:选择适合DSP芯片的操作系统,如uC/OS等。
(2)驱动程序开发:编写驱动程序的代码,实现硬件的初始化、配置和控制。
(3)控制算法实现:根据控制需求,编写控制算法的代码,实现电机的精确控制。
(4)通信协议开发:编写与上位机或其他设备进行数据交换的通信协议。