直流电机控制实验指导书
- 格式:doc
- 大小:711.50 KB
- 文档页数:9
实验7 直流电机控制实验1.实验目的熟悉ePWM模块的各个寄存器,学会如何通过程序语言配置ePWM的各种属性并产生PWM波形,以及通过产生PWM信号控制步进电机。
2.实验主要内容(1)在CCS软件中,用C语言编写程序配置ePWM的各种属性并产生PWM波。
并控制直流电机的转速、方向。
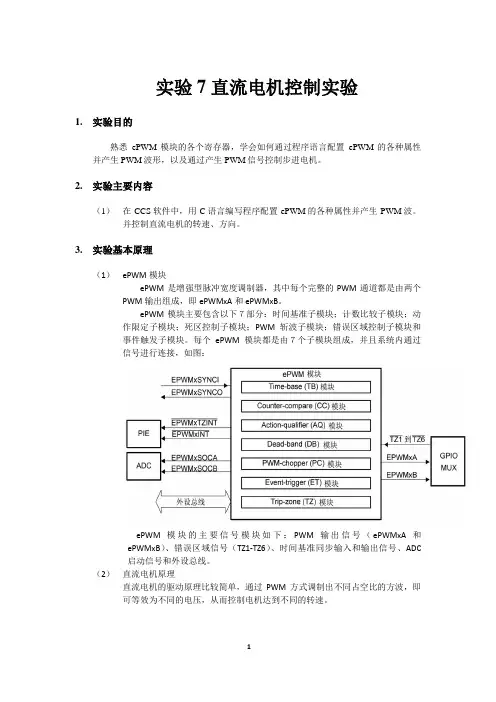
3.实验基本原理(1)ePWM模块ePWM是增强型脉冲宽度调制器,其中每个完整的PWM通道都是由两个PWM输出组成,即ePWMxA和 ePWMxB。
ePWM模块主要包含以下7部分:时间基准子模块;计数比较子模块;动作限定子模块;死区控制子模块;PWM斩波子模块;错误区域控制子模块和事件触发子模块。
每个ePWM模块都是由7个子模块组成,并且系统内通过信号进行连接,如图:ePWM模块的主要信号模块如下:PWM输出信号(ePWMxA和ePWMxB)、错误区域信号(TZ1-TZ6)、时间基准同步输入和输出信号、ADC启动信号和外设总线。
(2)直流电机原理直流电机的驱动原理比较简单,通过PWM方式调制出不同占空比的方波,即可等效为不同的电压,从而控制电机达到不同的转速。
4.实验过程和关键程序解读(1)打开DCMotor实验的工程(2)阅读EPWM配置的代码,本工程内对pwm的配置主要在InitEPwm3Example 函数中,如图配置的主要属性有,计数方式CTRMODE、计数总周期TBPRD,两个时钟分频HSPCLKDIV、CLKDIV,两个比较值CMPA和CMPB,以及到达0位、周期和加减达到比较值后两个通道所做的操作ZRO、PRD、CAU、CBU、CAD、CBD。
(3)修改主程序,使得能够完成实验要求i.本次实验与上次的stepmotor不同,计数方式使用的是增计数方式,这里不做更改,通过增计数方式完成任务即可。
ii.修改EPWM时钟频率,EPWM时钟频率= SYSCLK / (HSPCLKDIV * CLKDIV ),相当于从原先的4*4分频更改为128*128分频,避免三极管来不及响应的情况。
实验一直流、步进电机综合控制系统设计一、实验目的1.初步熟悉实验GPIO口的初始化设置,并熟悉实验箱各个模块的功能2.掌握步进机的控制原理及利用延时脉冲来改变步进电机速度3.掌握直流电机的控制原理及利用pwm占空比控制来改变速度4.学习IIC总线读取和写数据原理,并掌握对CAT1025 E2PROOM操作方法5.学会控制数码管的显示UART串口函数,并初步掌握中断处理函数的写法二、实验要求以MagicARM2410为实验平台,设计一个通过串口通信交互控制的综合型控制系统。
具体来说,可在启动时,自动列出一些选项,通过键盘选择某个选项而实现其功能;考虑到实时性,再按某个控制键能立刻停止当前功能而回到初始的待选状态。
具体功能要求如下:1.实现四个LED灯按照十六进制的规则依次亮灭;2.在超级终端上输入两个两位数,实现两位数的加减乘除并显示运算结果;3.显示当前的年月日、星期、时分秒;4.实现步进电机的调速和正反转;可用旋转按钮W1或按键控制调速,在超级终端和数码管上同步显示其正反转和转速信息;三、实验基本原理1.S3C 2410A具有117个通用I/O口,分为A—H等8个端口,由于每个I/O口都有第2功能,甚至第3功能,所以需要通过设置GPxCON 寄存器来选择GPx口I/O口功能,其中x可以为A、B、C、D、E、F、G表示相应的I/O端口。
当I/O口设置为GPIO输出模式(Output模式)时,可以通过写GPxDAT控制相应I/O口输出高电平或低电平,GPxDAT为1的位对应I/O输出高电平,为0的位对应输出低电平。
2.工程模板中包含有串口软件包UART.C,用户可以调用相应的接口函数】进行串口数据发送和接收,串口的波特率需要在config.h文件中进行设置,本实验使用默认的115200波特率。
对串口进行初始化时,首先要设置相应I/O口为TXD0,TRD0功能引脚,然后通过ULCON0来设置通讯波特率。
实验一直流电动机一.实验目的1.学习电机实验的基本要求与安全操作注意事项。
2.认识在直流电机实验中所用的电机、仪表、变阻器等组件及使用方法。
3.熟悉他励电动机(即并励电动机按他励方式)的接线、起动、改变电机方向与调速的方法。
二.预习要点1.如何正确选择使用仪器仪表。
特别是电压表、电流表的量程。
2.直流他励电动机起动时,为什么在电枢回路中需要串联起动变阻器?不连接会产生什么严重后果?3.直流电动机起动时,励磁回路连接的磁场变阻器应调至什么位置?为什么?若励磁回路断开造成失磁时,会产生什么严重后果?4.直流电动机调速及改变转向的方法。
三.实验项目1.了解MEL系列电机系统教学实验台中的直流稳压电源、涡流测功机、变阻器、多量程直流电压表、电流表、毫安表及直流电动机的使用方法。
2.用伏安法测直流电动机和直流发电机的电枢绕组的冷态电阻。
3.直流他励电动机的起动,调速及改变转向。
四.实验设备及仪器1.MEL系列电机系统教学实验台主控制屏(MEL-I、MEL-IIA、B)2.电机导轨及测功机、转速转矩测量(MEL-13)或电机导轨及校正直流发电机3.直流并励电动机M034.220V直流可调稳压电源(位于实验台主控制屏的下部)5.电机起动箱(MEL-09)。
6.直流电压、毫安、安培表(MEL-06)。
五.实验说明及操作步骤1.由实验指导人员讲解电机实验的基本要求,实验台各面板的布置及使用方法,注意事项。
2.在控制屏上按次序悬挂MEL-13、MEL-09组件,并检查MEL-13和涡流测功机的连接。
调节R 使电枢电流达到0.2A (如果电流太大,可能由于剩磁的作用使电机旋转,测量无法进行,如果此时电流太小,可能由于接触电阻产生较大的误差),迅速测取电机电枢两端电压U M 和电流I a 。
将电机转子分别旋转三分之一和三分之二周,同样测取U M 、I a ,填入表1-1。
(3)增大R (逆时针旋转)使电流分别达到0.15A 和0.1A ,用上述方法测取六组数据,填入表1-1。
实验二并励直流电动机的工作特性与调速性能的测定一、实验目的学习用实验方法求直流电动机的工作特性,并了解直流电动机的调速方法。
二、实验内容1、在额定电压与额定励磁电流的条件下,测定直流电动机的工作特性。
*2、在负载基本不变的情况下,分别改变电枢回路电阻R2和电枢电压U与励磁电流I f的大小,测量直流电动机的转速。
三、实验线路及操作步骤1、做电机的负载实验(1)按图2-1接好线后,R f1调到最小位置、R f2调到最大位置、R1=0,合上电源开关K1,空载起动直流电动机ZD。
调节R f1,使n=n N,调节R f2使发电机建立正常电压,在保持电动机端电压U=U N 及n=n N的条件下,逐步增加发电机负载电流,使电动机的负载增加,直到电动机输入电流达到额定电流为止,该点即为电动机的额定运行点(即U=U N、I=I N、n=n N),而此时的励磁电流即为电动机的额定励磁电流I f1=I fN.(2)做直流电动机的负载实验,在U=U N、I f1=I fn及I f2不变的条件下,逐步减小发电机输出电流(减小灯泡数量),直到I F=0为止,每次记下电动机的电枢电流I a与转速n,共读取5~7组数据(包括额定点),记录于表2-1中表2-1 U=U N= 伏 I f1=I fN = 安*2.改变电动机电枢回路电阻R1的调速方法实验线路如图2-1所示。
(1)起动直流电动机。
实验条件为U=U N,I f1=I fN,在调速过程中电动机带一个恒转矩的负载。
将电源电压和电动机的励磁电流均调到额定值。
为使发电机能等效于一个恒转矩负载,设法在整个调速过程中保持发电机的励磁电流与电枢电流均不变,具体操作如下:合上K2调节R f2使发电机励磁电流等于额定值,再合上K3,并调节发电机的负载电阻R2(灯泡数量),选择发电机的负载电流为一恒定值(0.5I N)。
(2)将电机电枢回路电阻R1从零开始逐渐增大,当R1变化时,转速会发生变化,使发电机的感应电势发生变化,所以这时必须调节一下R2,才能使I F仍维持为原先的数值(0.5I N)。
控制电机实验指导书目录一、概述 (3)二、实验地点 (3)三、实验项目 (3)实验一直流无刷电机实验 (4)实验二直线电机实验 (7)实验三(一)力矩式自整角机实验 (10)实验三(二)控制式自整角机参数的测定 (12)实验五正余弦旋转变压器实验 (15)三、教学参考书 (19)一、概述本课程是自动化等相关专业的专业选修课。
通过本课程的学习,使学生掌握各种控制电机的结构、工作原理以及运行特性,在自动控制系统和其它场合能够使用的各种控制电机,使学生初步具备选用各种控制电机的能力,并为毕业后从事专业工作打下坚实的基础。
二、实验地点1212 控制电机实验室1206电机实验室三、实验项目实验一直流无刷电机实验实验二直线电机实验实验三、自整角机实验实验四正余弦旋转变压器实验实验一直流无刷电机实验(一)实验目的1.通过实验测定直流无刷电机的主要技术参数。
2.掌握直流无刷电机的工作原理和运行特性。
(二)实验仪器设备及器材1.电机系统教学实验台主控制屏2.NMEL-27A 直流无刷电机及其控制系统3.双踪示波器(自备)(三)实验内容1.计算直流无刷电机的给定转速比,以及绘制给定转速曲线。
2.测定直流无刷电机紧急制动时间3.测定直流无刷电机自动停车时间(四)实验要求1、预习及思考1)直流无刷电机的工作原理和运行特性。
2)直流无刷电机的主要技术指标。
2、实验过程中的注意事项直流无刷电机的参考电源Vcc和地Gnd我们为了学生方便观测,都已经把该端点引到了面板上,学生使用的时候,千万注意不能将两者短接,否则造成设备损坏。
3、实验报告数据处理要求1)描述直流无刷电机的工作原理。
2)计算直流无刷电机的给定转速比,以及绘制给定转速曲线。
3)比较直流无刷电机紧急制动T1和自由停车T2的时间差,思考两者之间的区别,以及在实际当中的应用范围。
4、撰写实验报告(五)实验步骤1.实验装置各接线端子功能说明(1)6脚F/R:与(5脚GND)一起控制电机的正反转,相连时反转,断开时为正转。
实验一 直流他励电动机一.认识1.了解 MCL--1 实验台中的直流稳压电源、测功机、变阻器多量程直流电 压表、电流表、直流电动机的使用方法。
2.直流并励电动机电枢串电阻起动。
3.改变串入电枢回路电阻或改变串入励磁回路电阻时,观察电动机转速变化情况。
1.实验操作步骤1.仪表和变阻器的选择仪表的量程是根据电机的额定值和实验中可能达到的最大值来选择。
(1)电压量程的选择如测量电动机两端为220伏的直流电压,选用直流电压表应为300伏量程档。
(2)电流量程的选择因为电动机的额定电流为1.1安,测量电枢电流的电表A 可选用直流电流表的5A 量程档;额定励磁电流小于0.16安,电流表A 2 选用200mA 量程档。
(3)变阻器的选择变阻器选用的原则是根据实验中所需的阻值和流过变阻器最大的电流来确定。
2.实验仪器: (1)M03电机(2)MEL-09电阻箱(R 1 = 100Ω、R f =3000Ω)(3)测功机及导轨(4)直流电压表、电流表在主屏左上方。
(5)直流电源在主屏右下方。
3.直流并励电动机的起动 实验线路如图1-1所示。
图中M 为直流并励电动机M03, 其额定功率P N =185W,额定电压U N =220V ,额定电流I N =1.1A ,额定转速n N =1600r /min ,额定励磁电流I fN <0.16A 。
G 为测功机,TG 为测速发电机。
直流电压电流表选用主屏面上的直流表,R 1选用MEL-09挂箱上电阻值为100Ω、电流为1.22A 的变阻器作为直流并励电动机的起动电阻。
R f 选用MEL-09挂箱上阻值为3000Ω、电流为200mA 的变阻器,作为直流并励电动机励磁回路串接的电阻。
接好线后,电枢电源的电压应调节到约220V 。
4.并励电动机起动步骤(1)接好线后检查接线是否正确,电表的极性、量程选择是否对,励磁回路接线是否牢靠。
然后,将起动电阻R1调到阻值最大位置,磁场调节电阻R f 调到最小位置,作好起动准备。
控制电机实验指导东北石油大学电气信息工程学院二零一二年九月目录目录实验一直流伺服电机实验 (1)实验二永磁同步电机实验 (3)实验三旋转变压器 (5)实验四力矩式自整角机 (10)实验一直流伺服电机实验一、实验目的1、熟悉MATLAB/SIMULINK的集成环境,了解各窗体和模块的功能和使用方法;2、熟练使用MATLAB/SIMULINK的帮助系统;3、熟练掌握直流伺服电机建模和仿真方法。
二、实验内容1、实验模型及参数设置仿真时间10s,解算方法ode23s。
2、motor starter模块参数3、Ideal Switch以及Timer参数设置三、实验报告要求报告中要附有实验模型及相关示波器中波形图。
实验二永磁同步电机实验一、实验目的1、熟悉MATLAB/SIMULINK的集成环境,了解各窗体和模块的功能和使用方法;2、熟练使用MATLAB/SIMULINK的帮助系统;3、熟练掌握永磁同步电机建模和仿真方法。
二、实验内容1、实验模型及参数设置转速设定值700,PI控制器参数P=50,I=2.6,输出范围[-30 30];Step初始值3稳态值1,起跳时间0.04;PMSM采用默认参数,仿真时间0.06s,解算方法ode15s。
2、dq2abc模块参数2、PWMinv模块参数三、实验报告要求报告中要附有实验模型及相关示波器中波形图。
实验三旋转变压器旋转变压器是一种输出电压随转子转角变化的信号元件。
当激磁绕组以一定频率的交流电激励时,输出绕组的电压可与转角的正弦、余弦成函数关系,或在一定范围内可以成线性关系。
它广泛用于自动控制系统中的三角运算、传输角度数据等,也可以作为移相器用。
一、使用说明HK-56由旋转变压器及旋转变压器专用的中频电源组成。
1、旋转变压器(1)旋转变压器技术指标型号:36XZ20-5电压比:0.56电压: 60V频率:400Hz激励方:定子空载阻抗;2000Ω绝缘电阻:≥100MΩ精度: 1级(2)刻度盘1)本装置将旋转变压器转轴与刻度盘固紧连接,使用时旋转刻度盘手柄即可完成转轴旋转。
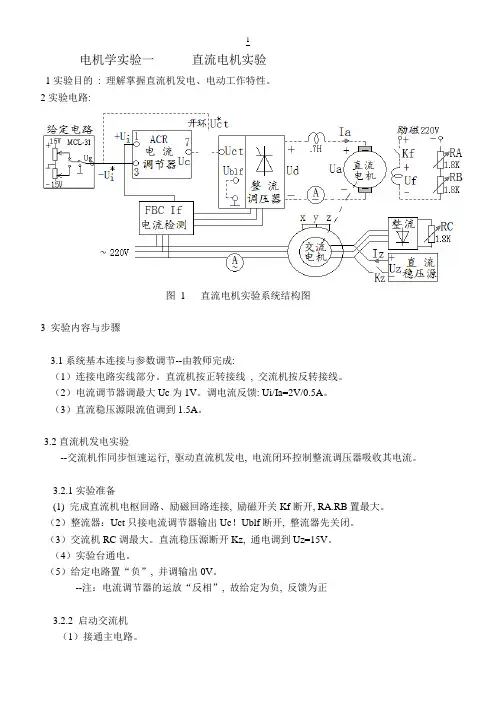
电机学实验一直流电机实验1实验目的: 理解掌握直流机发电、电动工作特性。
2实验电路:图 1 直流电机实验系统结构图3 实验内容与步骤3.1系统基本连接与参数调节--由教师完成:(1)连接电路实线部分。
直流机按正转接线, 交流机按反转接线。
(2)电流调节器调最大Uc为1V。
调电流反馈: Ui/Ia=2V/0.5A。
(3)直流稳压源限流值调到1.5A。
3.2直流机发电实验--交流机作同步恒速运行, 驱动直流机发电, 电流闭环控制整流调压器吸收其电流。
3.2.1实验准备(1) 完成直流机电枢回路、励磁回路连接, 励磁开关Kf断开, RA.RB置最大。
(2)整流器:Uct只接电流调节器输出Uc!Ublf断开, 整流器先关闭。
(3)交流机RC调最大。
直流稳压源断开Kz, 通电调到Uz=15V。
(4)实验台通电。
(5)给定电路置“负”, 并调输出0V。
--注:电流调节器的运放“反相”, 故给定为负, 反馈为正3.2.2 启动交流机(1)接通主电路。
(2)减RC起动交流机反转到~1000rpm, 接通直流稳压源Kz, RC回最大。
使交流机进入同步恒速(1500rpm)运行, 驱动直流机发电。
3.2.3直流发电机空载Uf-E特性(即if -φ磁化特性)实验断Kf使Uf=0, 测量记录对应的直流机剩磁发电电势E(|Ua|)。
接通Kf后调RA+RB使Uf= 90, 160, 220V。
测量记录E。
3.2.4 直流发电机负载特性实验--用电流闭环恒定吸收直流机发电电流, 并转为交流功率送电网。
(1)调RA+RB保持励磁Uf=220V。
(2)测Ud应为负!(否则查改直流机电枢接线)。
整流器Ubf接通, 允许其工作。
(3)加负载: 用负给定电位器调-Ui*到Ia=(0), 0.3, 0.6A, 测量记录Ia、Ua。
*(4) 可用RA+RB降Uf=200V, 测量记录Ia、Ua—观察电流环恒流效果。
(5) 停车:先用-Ui*减Ia到0, 再断开Kz, 电机停车后断主电路。
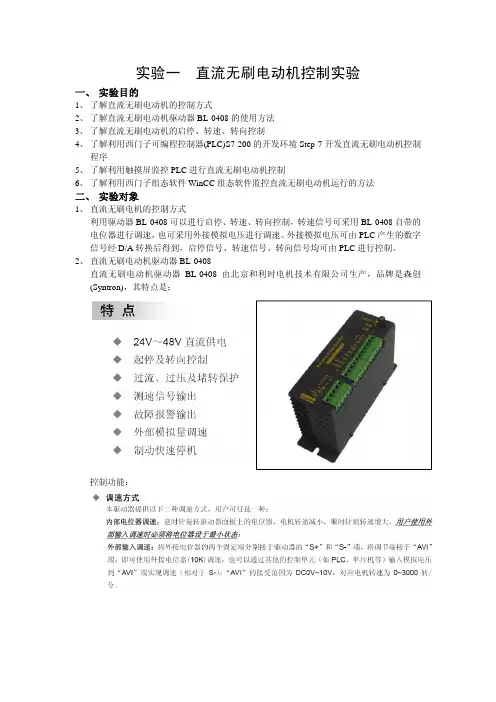
实验一 直流无刷电动机控制实验一、 实验目的1、了解直流无刷电动机的控制方式2、了解直流无刷电动机驱动器BL-0408的使用方法3、了解直流无刷电动机的启停、转速、转向控制4、了解利用西门子可编程控制器(PLC)S7-200的开发环境Step-7开发直流无刷电动机控制程序5、了解利用触摸屏监控PLC进行直流无刷电动机控制6、了解利用西门子组态软件WinCC组态软件监控直流无刷电动机运行的方法二、 实验对象1、直流无刷电机的控制方式利用驱动器BL-0408可以进行启停、转速、转向控制,转速信号可采用BL-0408自带的电位器进行调速,也可采用外接模拟电压进行调速。
外接模拟电压可由PLC产生的数字信号经D/A转换后得到,启停信号、转速信号、转向信号均可由PLC进行控制。
2、直流无刷电动机驱动器BL-0408直流无刷电动机驱动器BL-0408由北京和利时电机技术有限公司生产,品牌是森创(Syntron),其特点是:控制功能:3、直流无刷电动机57BL-0730N1-LS-B直流无刷电动机57BL-0730N1-LS-B由北京和利时电机技术有限公司生产,品牌是森创(Syntron)。
技术数据森创电机型号说明4、可编程控制器(PLC)与STEP 7z西门子S7-200系列小型PLC(Micro PLC)可应用于各种自动化系统。
紧凑的结构、低廉的成本以及功能强大的指令集使得S7--200 PLC成为各种小型控制任务理想的解决方案。
S7-200产品的多样化以及基于Windows的编程工具,使您能够更加灵活地完成自动化任务。
z S7-200 CPU包括CPU 221、CPU 222、CPU 224、CPU 224XP和CPU 226等型号,此处使用的是CPU224XP。
z STEP 7-Micro/WIN 4.0版是用于S7-200的32位编程软件包,它包括:z支持最新CPU增强功能的新软件工具和改进过的软件工具: PID自整定控制面板、PLC内置位控向导、数据归档向导和配方向导。
控制电机实验指导书机电工程学院自动化系2011年9月实验1 直流伺服电动机实验一、实验目的1.分析学握直流伺服电动机的运行原理。
2.拿握直流伺服电动机调节特性的测量方式。
二、实验方式和内容1.起动电动机,维持电动机输出转矩T=(),调节直流伺服电动机电枢电压(注:单方向调节控制屏上旋钮),直到n=1000r/min,测取直流伺服电动机的调节特性n=F(Ua)。
2.记录7-8组数据于表1中。
3.用坐标纸画出调节特性。
1三、实验注意事项1 •注意用电安全,所有实验需通过实验指导教师检査线路后方可合闸。
2•签到分两次进行,实验结束后应到签处处签到方可离开。
离开前应归还电表、实验指导书、工具等实验用具。
不得半途离开实验课堂。
3.不得高吉喧哗,听音乐。
4.如出现实验事故,应尺时断开电源,其他问题请参阅学生实验准则。
四、预习报告内容(占30分)1、实验名称、实验目的、实验原理和实验线路;2、主要仪器设备、名称、规格、数量及实验室编号;3、原始记录表格,估计算、特殊注意事项。
实验2 测速发电机实验一、实验目的1.通过实验加深对直流测速发电机工作特性的了解。
2.拿握直流发电机大体特性的测定方式。
二、实验方式和内容1•直流测速发电机的安装,将直流测速发电机(28CY09)与永磁直流驱动电机的细轴端连接,驱动电机的另一端与测功机轴连接。
将机箱控制面板的直流可调电源(()〜220V)接在驱动电机的电枢两头。
2•先将旋钮调至输出电压为零,再开电源,逐渐调节电压,驱动电机开始转动,带动直流测速发电机转动,用万用表的直流电压档,测试测速发电机的空载输岀电压特性。
3.测试空载输出电压特性时,测速机两头断开,不接电阻。
通过电压调转速,使转速别离为20()转/分、400转/分、……、1400转/分。
别离测出不同转速的空载电压,填入下表。
4.用坐标纸画出特性曲线。
表1数据表三、实验注感事项1 •注意用电安全,所有实验需通过实验指导教师检査线路后方可合闸。
实验二直流电机控制一、实验目的1.了解直流电机控制原理。
2.学习单片机控制直流电机的编程方法。
3.了解单片机控制外部设备的常用电路。
二、实验原理直流电机的转动方向是由电压的正负来控制的,电压为正时正转,电压为负则反转。
直流电机的转速是由控制脉冲的幅度或占空比来决定的,在电压允许范围内,控制电压越高或正向占空比越大,转速越快,反之则越慢。
本实验电机的控制电路是由单片机控制D/A转换器0832,在D/A的输出端辅以必要的信号调理电路产生-8V到+8V的电压来实现的,见图2-1所示。
电机的测速电路是由安装在电机转盘上的小磁芯,通过霍尔元件感应电机的转速,见图2-2所示,用单片机控制8255 读回感应脉冲,从而测算出电机的转速。
图2-1 DA转换电路图2-2 电机与测速电路原理图三、程序流程图图2-3四、实验任务与要求1、根据实验电路、编写程序、驱动直流电机运转。
2、电机运转方式为正向快转、慢转、停止、反向快转、慢转。
3、用实验箱上的数码管将电机的运转方式显示出来。
4、编制程序,利用P3.4/P3.5及霍尔元件测算出电机的转速。
(选做)五、实验方法与步骤1、将0832的CS连至系统地址CS1、KEY/LED连至系统地址CSO,拨动开关K0、K1、K2、K3、K4分别接到P1.0~P1.4以实现4种不同的电机运转方式的控制(逻辑开关K1~K4电路图如图2-4所示):图2-4 逻辑开关电路state1: 当K0为0,其他拨动开关为1时,电机正向快转,同时让数码管显示1来表示电机正向快转;state2: 当K1为0,其他拨动开关为1时,电机正向慢转,同时让数码管显示2来表示电机正向慢转;state3: 当K2为0,其他拨动开关为1时,电机停止,同时让数码管显示0来表示电机停转;state4: 当K3为0,其他拨动开关为1时,电机反向慢转,同时让数码管显示3来表示电机反向慢转;state5: 当K4为0,其他拨动开关为1时,电机反向快转,同时让数码管显示4来表示电机反向快转;运行程序、观察电机的运转状态。
《控制电机》课程实验指导书说明:1.图片及表暂不编号;2.实验报告格式:实验名称实验目的实验原理实验内容结论。
3.实验前应进行预习,写出预习报告,编写好程序代码。
预习报告可按实验报告格式书写。
4.不做预习或无预习报告者,禁止进入实验室实验。
实验目录:3.直流电动机PWM控制Protues仿真24.力矩式自整角机实验15. 控制式自整角机参数的测定6. 正余弦旋转变压器实验7. 直流无刷电机实验8. 直线电机实验实验三、直流电动机PWM控制Protues仿真2一.实验目的:1.学习驱动芯片L298特性,并对直流电动机进行PWM控制。
二.实验属性及设备:验证性实验,使用电脑及相关专业软件。
三.实验原理:1.本实验L298芯片对直流电动机进行PWM控制。
L298是SGS公司的产品,恒压恒流桥式2A驱动芯片。
可以驱动两个直流电动机,也可用于步进电动机的驱动。
其输出电压最高可达50V,可以直接通过电源来调节输出电压;也可直接用单片机的IO口提供信号。
电路简单,使用比较方便。
L298外形及管脚如图1,proteus仿真模型如图2。
图1:L298外形及管脚图图2:L298仿真模型L298N可接受标准TTL逻辑电平信号,9管脚接4.5~7 V电压。
4脚VS接电源电压,VS电压范围为+2.5~46 V。
输出电流可达2.5 A,可驱动电感性负载。
1脚和15脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。
L298可驱动2个直流电动机,OUT1,OUT2以及OUT3,OUT4之间可分别接直流电动机,本实验装置我们选用驱动一台电动机。
5,7,10,12脚接输入控制电平,控制电机的正反转。
EnA,EnB接控制使能端,控制电机的停转。
表1是L298N功能逻辑图。
In3,In4当EnA 为高电平,输入电平为一高一低,电机正或反转。
同为低电平电机停止,同为高电平电机刹停。
2.PWM波生成方法与上一实验方法相同。
实验一直流电机实验一、实验目的1、学习电机实验的基本要求与安全操作注意事项。
2、认识在直流电机实验中所用的电机、仪表、变阻器等组件及使用方法。
3、熟悉他励电动机(即并励电动机按他励方式)的接线、起动、改变电机转向与调速的方法。
二、预习要点1、如何正确选择使用仪器仪表。
特别是电压表电流表的量程。
2、直流电动机起动时,为什么在电枢回路中需要串接起动变阻器?不串接会产生什么严重后果?3、直流电动机起动时,励磁回路串接的变阻器应调至什么位置?为什么?若励磁回路断开造成失磁时,会产生什么严重后果?4、直流电动机调速及改变转向的方法。
三、实验项目1、了解DD01电源控制屏中的电枢电源、励磁电源、直流电机、变阻器、多量程直流电压表、电流表及直流电动机的使用方法。
2、用伏安法测直流电动机和直流发电机的电枢绕组的冷态电阻。
3、直流他励电动机的起动、调速及改变转向。
四、实验设备12、控制屏上挂件排列顺序:D31、D42、D41、D51、D31、D44(为便于接线)五、实验内容1、熟悉实验装置根据实验指导老师的介绍,熟悉所用电机及电气技术实验装置各面板布置及使用方法,掌握电机实验的基本方法,掌握安全操作和注意事项。
2、直流仪表、转速表和变阻器的选择直流仪表、转速表量程是根据电机的额定值和实验中可能达到的最大值来选择,变阻器根据实验要求来选用,并按电流的大小选择串联、并联或串并联的接法。
(1)电压量程的选择电压表的量程应大于被测电路电压的最大值。
如测量电动机两端为220V 的直流电压,选用直流电压表为1000V 量程档。
(2)电流量程的选择因为直流电动机的电枢电流较大,因此应选用较大量程的表。
直流并励电动机的电枢电额定电流为1.2A ,测量电枢电流的电表A 3可选用有5A 量程档的直流电流表,同样测功机的电枢回路电流表A 4也选用有5A 量程档的直流电流表;额定励磁电流小于0.16A ,电流表A 1选用200mA 量程档。
实验一直流发电机一、实验目的1、掌握用实验方法测定直流发电机的各种运行特性,并根据所测得的运行特性评定该被测电机的有关性能。
2、通过实验观察并励发电机的自励过程和自励条件。
二、预习要点1、什么是发电机的运行特性?在求取直流发电机的特性曲线时,哪些物理量应保持不变,哪些物理量应测取。
2、做空载特性实验时,励磁电流为什么必须保持单方向调节?3、并励发电机的自励条件有哪些?当发电机不能自励时应如何处理?4、如何确定复励发电机是积复励还是差复励?三、实验项目1、他励发电机实验(1)测空载特性保持n=n N使I L=0,测取U0=f(I f)。
(2)测外特性保持n=n N使I f=I fN,测取U=f(I L)。
(3)测调节特性保持n=n N使U=U N,测取I f=f(I L)。
2、并励发电机实验(1)观察自励过程(2)测外特性保持n=n N使R f2=常数,测取U=f(I L)。
3、复励发电机实验积复励发电机外特性保持n=n N使R f2=常数,测取U=f(I L)。
四、实验设备及挂件排列顺序1、实验设备序号型号名称数量台1 DD03-4 涡流测功机导轨 1件2 D55-4 涡流测功机控制箱 1台3 DJ23-1 直流电动机 1台4 DJ13 直流复励发电机 1件5 D31 直流数字电压、毫安、安培表 26 D44 可调电阻器、电容器 1件件7 D51 波形测试及开关板 1件8 D42 三相可调电阻器 12、屏上挂件排列顺序D55-4、D31、D44、D31、D42、D51五、实验方法1、他励直流发电机按图1-1接线。
图中直流发电机G选用DJ13,其额定值P N=100W,U N=200V,I N=0.5A,n N=1600r/min。
直流电动机DJ23-1作为G的原动机(按他励电动机接线)。
涡流测功机、发电机及直流电动机由联轴器同轴联接。
开关S选用D51组件上的双刀双掷开关。
R f1选用D44的1800Ω变阻器,R f2 选用D42的900Ω变阻器,并采用分压器接法。
实验一直流电机速度控制与PID参数校正
一、实验目的
1、掌握调整直流伺服驱动器PID参数的方法
2、理解不同转动惯量对系统性能指标的影响
二、实验要求
通过simulink对电机进行仿真,确定合适的PID参数。
随后对直流电机进行电流环、速度环、位置环的PID控制,通过改变系统转动惯量,根据期望性能指标整定直流伺服驱动器的电流环、速度环、位置环PID参数,确保理论曲线与实际曲线尽量拟合。
进一步地分析直流电机控制精度的影响因素。
三、实验设备
1、直流伺服系统控制平台,GSMT2012;
2、PC、Easy Motion Studio软件;
四、实验原理
转动惯量是刚体转动时惯量的度量,其量值取决于物体的形状、质量分布及转轴的位置。
转动惯量在旋转动力学中的质量,所以当系统转动惯量增大后,相同的控制器参数情况下,系统的性能指标一定下降。
为保持原有的性能指标,必须重新整定PID参数。
五、实验步骤
1、Easy Motion Studio软件对直流电机进行测试
Easy Motion Studio是针对直流电机控制器进行参数调整的专业软件,它能够实时在线的对电机的参数进行调整,并通过编码器对电机参数进行测试,并通过软件界面观测调试结果,最终成功选择合适的PID参数。
首先,对Easy Motion Studio软件进行了解。
点击图标,进入软件界面,选择“Open”,并点击“OK”。
如下图所示。
进入软件界面后,在“View”菜单下,选择“Project”即可得到以下界面。
选择在左列的下拉菜单选择“Setup”,并选择“Edit”,在这里对直流电机的参数可以方便地进行调整,并可对调整后的结果进行实时观测。
需要注意的是,在这里电机应选择T54。
并
选择“Save to User Database”。
进入到“Drive Setup”将控制模式选为“位置”或者“速度”模式。
当对电机的参数调整完成后,可通过“COM1”口下载到电机的控制器中。
操作步骤如下:点击“Save as”保存当前位置,随后点击“Download to Driver Motor”将修改后的参数下载
到电机的驱动器中。
进入“Driver Setup”>“Speed controller”,点击“Tune & Test”
降速时间tan,停止时间tn的最大值均为30s。
随后选择“Test”,对电机的速度进行PI手动调整,调整结果可以通过测试界面看出。
其中红色为理论曲线,黄色为实际曲线。
进行Kp、Ki参数调整,使得黄色曲线尽量与红色
曲线靠近。
进行Kp、Ki调节时,先将Kp进行调节,直至Kp对曲线影响不大,再进行Ki 调节。
如果实时显示“on-line plot”中理论曲线和实际曲线较近,可选择“data logger”,该曲线为处理后曲线。
(2)电流环的整定
进行电流环整定时,选择“Driver Setup”中“Current Controller”,并在“Test Parameters”中选择合适的测试电流,随后选择“Test”
黄色曲线为电机的实测曲线,红色曲线为期望的电流曲线,蓝色曲线是电压曲线。
电流Kp、Ki调节,采用与速度相同的方法进行调节。
(3)位置环的整定
位置调节是采用的PID调节,因此需要调整Kp、Ki、Kd三个参数
红色为理论位置曲线,黄色为实际位置曲线。
其中最大为15rot(即角度为5400deg),需要注意的是tap、tan需要调整至合适的范围,不能超过允许范围。
最终位置为15rot时,时间不得短于1.8s,否则电机无法启动。
六、实验结果分析
1、直流伺服电机的控制框图;
(1)速度控制框图
(2)增大转动惯量后,重新调整PID参数的校正图。
2、分析Kp、Ki、Kd对直流电机主要三个参数(电流、速度、位置)的影响。
实验二直流电机运动控制
实验目的
1、了解实验法建模的基本步骤;
2、掌握直流电机作为整个系统的控制的基本方法
一、实验要求
通过Easy Motion Studio对电机参数进行调整,并下载到电机控制器中,随后通过simulink接口对电机进行控制。
二、实验设备
1、直流伺服系统控制平台,GSMT2012;
2、PC、Easy Motion Studio软件;
三、实验原理
1、通过Easy Motion Studio软件设置直流电机的参数(参考实验一),并通过串口将参
数下载至电机控制器中。
2、打开matlab,并选择目标“GSMT2012Pos.mdl”、“GSMT2012Vel.mdl”所在文件夹。
3、选择GSMT2012POS.mdl进行参考。
点击“Start Real Control”模块,得到子模块。
其中,AD5为电位器采集;APOS为直流伺服电机的模拟量采集(光电编码器)。
CPOS模块为电机控制模块。
4、调整系统中阻尼力,在不同的阻尼力下观测外界对系统的影响。
四、实验结果分析
对不同阻尼力下电机的模拟量采集与实际电位器采集对比进行分析,外加负载对电机转
速或位置的影响。