自动控制原理复阻抗法
- 格式:docx
- 大小:37.25 KB
- 文档页数:2

自动控制原理习题及其解答第一章(略) 第二章例2-1 弹簧,阻尼器串并联系统如图2-1示,系统为无质量模型,试建立系统的运动方程。
解:(1) 设输入为y r ,输出为y 0。
弹簧与阻尼器并联平行移动。
(2) 列写原始方程式,由于无质量按受力平衡方程,各处任何时刻,均满足∑=0F ,则对于A 点有021=-+K K f F F F其中,F f 为阻尼摩擦力,F K 1,F K 2为弹性恢复力。
(3) 写中间变量关系式220110)()(y K F Y Y K F dty y d f F K r K r f =-=-⋅=(4) 消中间变量得 020110y K y K y K dtdy f dt dy f r r=-+- (5) 化标准形 r r Ky dtdyT y dt dy T +=+00 其中:215K K T +=为时间常数,单位[秒]。
211K K K K +=为传递函数,无量纲。
例2-2 已知单摆系统的运动如图2-2示。
(1) 写出运动方程式 (2) 求取线性化方程 解:(1)设输入外作用力为零,输出为摆角θ ,摆球质量为m 。
(2)由牛顿定律写原始方程。
h mg dtd l m --=θθsin )(22其中,l 为摆长,l θ 为运动弧长,h 为空气阻力。
(3)写中间变量关系式)(dtd lh θα= 式中,α为空气阻力系数dtd l θ为运动线速度。
(4)消中间变量得运动方程式0s i n 22=++θθθmg dt d al dtd ml (2-1) 此方程为二阶非线性齐次方程。
(5)线性化由前可知,在θ =0的附近,非线性函数sin θ ≈θ ,故代入式(2-1)可得线性化方程为022=++θθθmg dt d al dtd ml 例2-3 已知机械旋转系统如图2-3所示,试列出系统运动方程。
解:(1)设输入量作用力矩M f ,输出为旋转角速度ω 。
(2)列写运动方程式f M f dtd J+-=ωω式中, f ω为阻尼力矩,其大小与转速成正比。


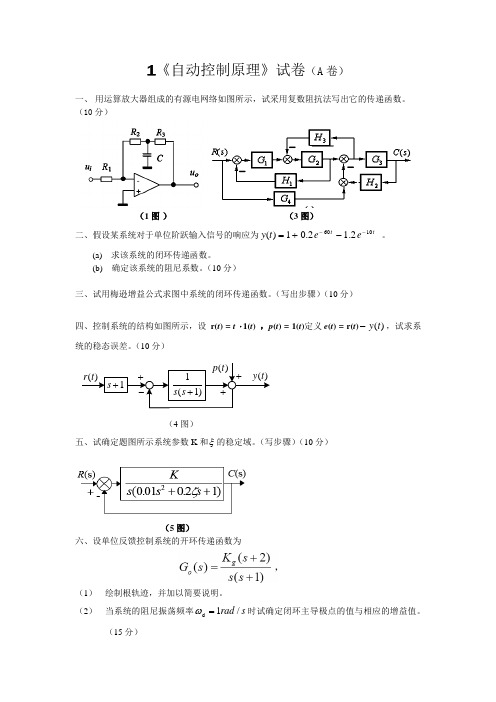
1《自动控制原理》试卷(A 卷)一、 用运算放大器组成的有源电网络如图所示,试采用复数阻抗法写出它的传递函数。
(10分)(1图 )(3图)二、假设某系统对于单位阶跃输入信号的响应为t te et y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。
(b) 确定该系统的阻尼系数。
(10分)三、试用梅逊增益公式求图中系统的闭环传递函数。
(写出步骤)(10分)四、控制系统的结构如图所示,设 r(t ) = t ⋅ 1(t ) ,p (t ) = 1(t )定义e (t ) = r(t ))(t y -,试求系统的稳态误差。
(10分))(t p )(t r -++)(t y 1+s )1(1+s s +(4图)五、试确定题图所示系统参数K 和ξ的稳定域。
(写步骤)(10分)(5图)六、设单位反馈控制系统的开环传递函数为(1) 绘制根轨迹,并加以简要说明。
(2) 当系统的阻尼振荡频率s rad /1d =ω时试确定闭环主导极点的值与相应的增益值。
(15分)七、最小相位系统的开环对数幅频特性的渐近线如图所示,确定系统的开环传递函数。
(10分)八、已知最小相位系统校正前后系统的折线对数幅频特性如图所示,其中Lo(ω)为校正前特性,L开(ω)为校正后特性。
(1)试作出校正装置的对数幅频特性Lc(ω)(折线);(2)试写出校正装置的传递函数Gc(s);(3)计算校正后系统的相位裕度γ。
(15分)cp为s右半平面上的开环根的个数,v为开九、设开环系统的奈氏曲线如下图所示,其中,环积分环节的个数,试判别闭环系统的稳定性。
(10分)(a)(b)2《自动控制原理》试卷(B 卷)一、 求下图所示系统的传递函数)(/)(0s U s U i 。
(10分)(1图) (3图)二、假设某系统对于单位阶跃输入信号的响应为t t e e t y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。

1《自动控制原理》试卷(A 卷)一、 用运算放大器组成的有源电网络如图所示,试采用复数阻抗法写出它的传递函数。
(10分)(1图 )(3图)二、假设某系统对于单位阶跃输入信号的响应为t t e e t y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。
(b) 确定该系统的阻尼系数。
(10分)三、试用梅逊增益公式求图中系统的闭环传递函数。
(写出步骤)(10分)四、控制系统的结构如图所示,设 r(t ) = t ⋅ 1(t ) ,p (t ) = 1(t )定义e (t ) = r(t ))(t y -,试求系统的稳态误差。
(10分)(4图)五、试确定题图所示系统参数K 和ξ的稳定域。
(写步骤)(10分)(5图)六、设单位反馈控制系统的开环传递函数为(1) 绘制根轨迹,并加以简要说明。
(2) 当系统的阻尼振荡频率s rad /1d =ω时试确定闭环主导极点的值与相应的增益值。
(15分)七、最小相位系统的开环对数幅频特性的渐近线如图所示,确定系统的开环传递函数。
(10分)八、已知最小相位系统校正前后系统的折线对数幅频特性如图所示,其中Lo(ω)为校正前特性,L开(ω)为校正后特性。
(1)试作出校正装置的对数幅频特性Lc(ω)(折线);(2)试写出校正装置的传递函数Gc(s);(3)计算校正后系统的相位裕度γ。
(15分)cp为s右半平面上的开环根的个数,v为开九、设开环系统的奈氏曲线如下图所示,其中,环积分环节的个数,试判别闭环系统的稳定性。
(10分)(a)(b)2《自动控制原理》试卷(B 卷)一、 求下图所示系统的传递函数)(/)(0s U s U i 。
(10分)(1图) (3图)二、假设某系统对于单位阶跃输入信号的响应为t t e e t y 10602.12.01)(---+= 。
(a) 求该系统的闭环传递函数。
(b) 确定该系统的阻尼系数。
(10分)三、系统的信号流图如图所示,求输出C (S )的表达式。



1-3解:系统的工作原理为:当流出增加时,液位降低,浮球降落,控制器通过移动气动阀门的开度,流入量增加,液位开始上。
当流入量和流出量相等时达到平衡。
当流出量减小时,系统的变化过程则相反。
流出量希望液位图一1-4(1)非线性系统(2)非线性时变系统(3)线性定常系统(4)线性定常系统(5)线性时变系统(6)线性定常系统2 2-1 解:显然,弹簧力为 kx (t ) ,根据牛顿第二运动定律有:F (t ) − kx (t ) = m移项整理,得机械系统的微分方程为:d 2x (t ) dt 2m d x (t ) + kx (t )= F (t ) dt2对上述方程中各项求拉氏变换得:ms 2 X (s ) + kX (s ) =F (s )所以,机械系统的传递函数为:G (s ) = X (s ) =F (s )1ms 2+k2-2 解一:由图易得:i 1 (t )R 1 = u 1 (t ) − u 2 (t ) u c (t ) + i 1 (t )R 2 = u 2 (t ) du c (t )i 1 (t )= Cdt 由上述方程组可得无源网络的运动方程为:C ( R + R ) du 2 (t ) u (t ) = CRdu 1 (t ) u (t )1 2 dt+ 22 + 1 dt 对上述方程中各项求拉氏变换得:C (R 1 + R 2 )sU 2 (s ) + U 2 (s ) = CR 2 sU 1 (s ) + U 1 (s )所以,无源网络的传递函数为:G (s ) = U 2 (s ) =U 1 (s )1 + sCR 21 + sC (R 1 +R 2 ) 解二(运算阻抗法或复阻抗法):U (s ) 1 + R 2 1 + R Cs2 = Cs =2U (s ) R + 1 + R 1 + ( R + R )Cs 1 1 21Cs22-5 解:按照上述方程的顺序,从输出量开始绘制系统的结构图,其绘制结果如下图所示:依次消掉上述方程中的中间变量 X 1 , X 2 , X 3 , 可得系统传递函数为:C (s ) = R (s )G 1 (s )G 2 (s )G 3 (s )G 4(s )1 + G2 (s )G3 (s )G 6 (s ) + G 3 (s )G4 (s )G5 (s ) + G 1 (s )G 2 (s )G 3 (s )G 4(s )[G 7 (s ) − G 8 (s )]2-6 解:①将G1 (s) 与G1 (s) 组成的并联环节和G1 (s) 与G1 (s) 组成的并联环节简化,它们的等效传递函数和简化结构图为:G 12 (s) = G1(s) + G2(s)G 34 (s) = G3(s) −G4(s)②将G12 (s), G34 (s) 组成的反馈回路简化便求得系统的闭环传递函数为:2-7 解:C(s)=R(s)G12(s)1 + G12(s)G34(s)=G1(s) + G2(s)1 +[G1(s) + G2(s)][G3(s) −G4(s)]由上图可列方程组:[E(s)G1 (s) −C(s)H2(s)]G2(s) = C(s)R(s) −H1(s)C(s)G2(s)= E(s)联列上述两个方程,消掉E (s) ,得传递函数为:C(s)= R(s)G1(s)G2(s)1 + H1(s)G1(s) + H2(s)G2(s)联列上述两个方程,消掉C (s) ,得传递函数为:E(s)= R(s)1 + H2(s)G2(s)1 + H1(s)G1(s) + H2(s)G2(s)1 22 23 2-8 解:将①反馈回路简化,其等效传递函数和简化图为: 0.4G (s ) =2s + 1 =1 +0.4 * 0.5 2s + 15+ 3将②反馈回路简化,其等效传递函数和简化图为:1 G (s ) = s + 0.3s + 1 = 5s + 3 21 + 0.4 5s + 4.5s + 5.9s + 3.4(s + 0.3s + 1)(5s + 3)将③反馈回路简化便求得系统的闭环传递函数为:0.7 * (5s +3)Θo (s)= 5s 3 + 4.5s 2 + 5.9s + 3.4=3.5s + 2.1Θi (s) 1 +0.7 * Ks(5s +3)5s3+ (4.5 +3.5K )s 2+ (5.9 + 2.1K )s +3.42 5s3-3 解:该二阶系统的最大超调量:σp =e−ζπ/1−ζ2*100%当σp= 5% 时,可解上述方程得:ζ=0.69当σp= 5% 时,该二阶系统的过渡时间为:ts≈3ζwn所以,该二阶系统的无阻尼自振角频率w n 3-4 解:≈3ζts=30.69*2= 2.17由上图可得系统的传递函数:10 * (1 + Ks)C (s)= R(s)s(s + 2)1 +10 * (1 +Ks)s(s + 2)==10 * (Ks +1)s + 2 * (1 +5K )s +10所以w n =10 ,ζwn=1 +5K⑴若ζ= 0.5 时,K ≈0.116所以K ≈0.116时,ζ= 0.5⑵系统单位阶跃响应的超调量和过渡过程时间分别为:σ p = e−ζπ / 1−ζ2*100% = e−0.5*3.14 /1−0.52*100% ≈ 16.3%t s =3 ζw n= 3 0.5 *≈ 1.910⑶ 加入 (1 + Ks ) 相当于加入了一个比例微分环节,将使系统的阻尼比增大,可以有效地减小原系统的阶跃响应的超调量;同时由于微分的作用,使系统阶跃响应的速度(即变w 212p化率)提高了,从而缩短了过渡时间:总之,加入 (1 + Ks ) 后,系统响应性能得到改善。


第二章 控制系统的数学模型2.1 RC 无源网络电路图如图2-1所示,试采用复数阻抗法画出系统结构图,并求传递函数U c (s )/U r (s ).图2-1解:在线性电路的计算中,引入了复阻抗的概念,则电压、电流、复阻抗之间的关系,满足广义的欧姆定律。
即:)()()(s Z s I s U = 如果二端元件是电阻R 、电容C 或电感L ,则复阻抗Z (s )分别是R 、1/C s 或L s 。
(1) 用复阻抗写电路方程式:sC S I S V R S U S U S I sC S I S I S U R S U S U S I c c c c C r 222221212111111)()(1)]()([)(1)]()([)(1)]()([)(⋅=-=⋅-=⋅-=(2) 将以上四式用方框图表示,并相互连接即得RC 网络结构图,见图2-1(a ).2-1(a )。
(3) 用梅逊公式直接由图2-1(a ) 写出传递函数U c (s )/U r (s ) 。
∆∆=∑KGG K独立回路有三个:SC R S C R L 1111111-=⋅-= SC R S C R L 22222111-=⋅-=回路相互不接触的情况只有L 1和L 2两个回路.则 2221121121SC R C R L L L ==由上式可写出特征式为:222111222112132111111)(1S C R C R S C R S C R S C R L L L L L ++++=+++-=∆ 通向前路只有一条221212211111111SC C R R S C R S C R G =⋅⋅⋅=由于G 1与所有回路L 1,L 2, L 3都有公共支路,属于相互有接触,则余子式为Δ1=1代入梅逊公式得传递函数1)(111111121221122121222111222112221111++++=++++=∆∆=s C R C R C R s C C R R s C R C R s C R s C R s C R s C R C R G G2-2 已知系统结构图如图2-2所示,试用化简法求传递函数C (s )/R (s )。

自动控制原理知识点总结第一章1、自动控制:是指在无人直接参与的情况下,运用控制装置操纵受控对象,是被控量等于给定值或按给定信号的变化规律去变化的过程。
2、被控制量:在控制系统中.按规定的任务需要加以控制的物理量。
3、控制量:作为被控制量的控制指令而加给系统的输入星.也称控制输入。
4、扰动量:干扰或破坏系统按预定规律运营的输入量,也称扰动输入或干扰掐入。
5、反馈:通过测量变换装置将系统或元件的输出量反送到输入端,与输入信号相比较。
反送到输入端的信号称为反馈信号。
6、负反馈:反馈信号与输人信号相减,其差为偏差信号。
7、负反馈控制原理:检测偏差用以消除偏差。
将系统的输出信号引回插入端,与输入信号相减,形成偏差信号。
然后根据偏差信号产生相应的控制作用,力图消除或减少偏差的过程。
8、自动控制系统的两种常用控制方式是开环控制和闭环控制。
9、开环控制:控制装置与受控对象之间只有顺向作用而无反向联系特点:开环控制实行起来简朴,但抗扰动能力较差,控制精度也不高。
10、闭环控制:控制装置与受控对象之间,不仅有顺向作用,并且尚有反向联系,既有被控量对被控过程的影响。
重要特点:抗扰动能力强,控制精度高,但存在能否正常工作,即稳定与否的问题。
11、控制系统的性能指标重要表现在:(1)、稳定性:系统的工作基础。
(2)、快速性:动态过程时间要短,振荡要轻。
(3)、准确性:稳态精度要高,误差要小。
12、实现自动控制的重要原则有:主反馈原则、补偿原则、复合控制原则。
第二章1、控制系统的数学模型有:微分方程、传递函数、动态结构图、频率特性。
2、传递函数:在零初始条件下,线性定常系统输出量的拉普拉斯变换域系统输入量的拉普拉斯变换之比3、求传递函数通常有两种方法:对系统的微分方程取拉氏变换,或化简系统的动态方框图。
对于由电阻、电感、电容元件组成的电气网络,一般采用运算阻抗的方法求传递函数。
4、结构图的变换与化简化简方框图是求传递函数的常用方法。

自动控制原理复阻抗法
在复阻抗法中,最常用的控制方式是利用变压器的耦合关系实现控制。
变压器是一个具有复阻抗特性的元件,通过改变变压器的耦合系数,可以
改变电路中的电阻、电感和电容等参数,进而影响电路的工作状态。
一般情况下,复阻抗法的控制过程分为两个阶段:第一阶段是建立基
准模型,即通过一定的方法将电路模型建立成稳定状态下的复阻抗形式;
第二阶段是进行控制,即通过控制变压器的耦合系数,调节电路中的电压
和电流,从而达到控制电路特定参数的目的。
复阻抗法的控制具有以下优点:
1.精度高:通过复阻抗法控制,能够精确地控制电路中的电流和电压,达到控制精度高的效果。
2.动态调节能力强:复阻抗法的控制具有极强的动态调节能力,可以
对电路中的参数进行快速调节和变更,适应各种复杂的工况要求。
3.稳定性好:复阻抗法的控制具有很高的稳定性,可以在任何工况下
实现稳定的工作状态。
总之,复阻抗法是一种非常有效的电路控制方式,在电路控制、能量
调节和工作状态均衡等方面都有着重要的应用价值。

自阻抗和互阻抗计算方法宝子们,今天咱们来唠唠自阻抗和互阻抗的计算方法哈。
先说说自阻抗。
自阻抗呢,简单来说就是电路中某个元件自身对电流的阻碍特性。
对于电阻元件呀,它的自阻抗就等于它自身的电阻值。
这就像一个小关卡,电流要通过这个电阻,就得克服这个阻碍,这个阻碍的大小就是电阻的值啦。
如果是电感元件呢,它的自阻抗计算就和频率有关哦,自阻抗等于电感值乘以角频率(ω = 2πf,f是频率)。
就好像电感这个小调皮,频率越高,它对电流的阻碍就越大呢。
对于电容元件,自阻抗等于1除以(电容值乘以角频率)。
电容就像个小储蓄罐,频率不同的时候,它对电流的阻碍也不一样哦。
再聊聊互阻抗。
互阻抗就有点像两个元件之间的一种相互影响下的阻碍关系。
比如说在一个有耦合电感的电路里。
计算互阻抗就稍微复杂一点啦。
如果两个电感之间存在互感M,那互阻抗就和这个互感以及角频率有关系哦。
在一些电路分析里,我们要考虑这种互感带来的互阻抗,因为一个电感的电流变化会通过互感影响到另一个电感的电压呢。
咱举个小例子来加深理解哈。
就像两个小伙伴,一个是电感L1,一个是电感L2,它们之间有互感M。
当L1中有电流变化的时候,这个变化会通过M影响到L2的电压,这个时候互阻抗就出来捣乱啦,它影响着两者之间的这种相互作用下的电学关系。
宝子们,其实自阻抗和互阻抗的计算虽然有点小复杂,但只要咱一步一步来,把每个元件的特性搞清楚,就没那么难啦。
就像走迷宫一样,知道每个岔路口的规则,就能顺利找到出口。
所以呀,多做几道相关的练习题,多看看实际的电路例子,很快就能掌握这个小知识啦。

第一章掌握自动控制系统的一般概念(控制方式,分类,性能要求)Ur给定输入量: 给定值Ug 被控制量: 加热炉的温度扰动量: 加热炉内部温度不均匀或坏境温度不稳定等外部因素 被控制对象:加热器控制器: 放大器、发动机和减速器组成的整体 (2)工作原理:给定值输入量Ug 和反馈量Ur 通过比较器输出, 经放大器控制发动机的转速n ,再通过减速器与调压器调节加热器的电压U 来控制炉温。
T7.(1)结构框图给定输入量:输入轴θr 被控制量: 输出轴θc扰动量: 齿轮间配合、负载大小等外部因素 被控制对象:齿轮机构 控制器: 液压马达 (2)工作原理:UeUg第二章掌握系统微分方程,传递函数(定义、常用拉氏变换),系统框图化简;1.(a)⎪⎪⎪⎩⎪⎪⎪⎨⎧=+=+=dtdu C i R u i i u iR u t ct ct t r )(02)(0)(01)()2......()1(.......... 将(2)式带入(1)式得:)()(01)(021)(0t r t t t u dtdu C R u R R u =++拉氏变换可得)()(01)(0221s r s s U CsU R u R =+⎪⎪⎭ ⎝整理得 21212)()(0)(R R Cs R R R U U G S r S s ++== 1.(b)⎪⎪⎪⎩⎪⎪⎪⎨⎧=+=+=dtdi L u R u i i u iR u Lt o t Lt t r )(2)(0)(01)()2........()1......(.......... 将(2)式代入(1)式得)()(0221)(01t r t t u u R R R dt u L R =++⎰ 拉氏变换得)()(0221)(01s r s s U U R R R U Ls R =++ 整理得LsR R R R LsR U U G s r s s )(21212)()(0)(++==2.1)微分方程求解法⎪⎪⎪⎩⎪⎪⎪⎨⎧+=-=+=-31224203221211111Rudt du c Ruu R uR u Rudt du c R u u c c c c c c c c r中间变量为1c u,2c u及其一阶导数,直接化简比较复杂,可对各微分方程先做拉氏变换⎪⎪⎪⎩⎪⎪⎪⎨⎧+=-=+=-3122423221211111RUU sc R U U RU R U RUU sc R U U c c c c c c c c r移项得⎪⎪⎪⎩⎪⎪⎪⎨⎧++==++=2432432211211)11()111(c c c c rU R R sc RU R RU U U R R sc R U 可得1112143243214321432)111()11(R R sc R R R R sc R R R R R R R R sc R R sc Ur U ++++=++++=2)复阻抗法⎪⎪⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎪⎪⎨⎧+=+++=++=2211232223234212121111*11*11sc R sc z U sc R sc z U sc R sc R R z sc R sc R R z r解得:1112143243RR sc R R R R sc R R Ur U ++++=3.分别以m 2,m 1为研究对象(不考虑重力作用)⎪⎪⎩⎪⎪⎨⎧--=---=11212121121222222)()()(ky dty y d c dt y d m dty y d cdt dy c t f dt y d m 中间变量含一阶、二阶导数很难直接化简,故分别做拉氏变换⎪⎩⎪⎨⎧--=---=112112112122222)()()(kY Y Y s c Y s m Y Y s c sY c s F Y s m 消除Y1中间变量21211222))1(()(Yk s c s m sc s c s c s m s F s++-++=10.系统框图化简:o (s)o (s)o (s)1.综合点前移,分支点后移o (s)1231133221231133221133()()()()()(1()())(1()())()()()()()1()()()()()()()()()()o i X s G s G s G s X s G s H s G s H s G s H s G s G s G s G s H s G s H s G s H s G s H s G s H s =+++=++++11. 系统框图化简:2.交换综合点,合并并联结构3.化简12341234243114412123123212343231344()()()()()()1()()()()(()/()()()/()()()/()())()()()1()()()()()()()()()()()()()()(o i X s G s G s G s G s X s G s G s G s G s H s G s H s H s G s G s H s G s G s G s G s G s G s G s G s H s G s G s G s G s H s G s G s H s G s G s H =+--+=+--+)s第三章掌握时域性能指标,劳斯判据,掌握常用拉氏变换-反变换求解时域响应,误差等2.(1)求系统的单位脉冲响应12()()()TsY(s)+Y(s)=KX(s)X(s)=1Y(s)=1()=20e t tTT y t y t Kx t K Ts k w t eT•--+=+=已知系统的微分方程为:对微分方程进行零初始条件的拉氏变换得当输入信号为单位脉冲信号时,所以系统输出的拉式变换为:进行拉式反变换得到系统的时域相应2.(2)求系统的单位阶跃响应,和单位斜坡响应22()()()TsY(s)+Y(s)=KX(s)X(s)=5Y(s)=1111110()10-10e ;1X(s)=Y(s)=t T y t y t Kx t KTK Ts Ts Ts sK s s s y t s•-+=+++=-=-=已知系统的微分方程为:对微分方程进行零初始条件的拉氏变换得当输入信号为单位阶跃信号时,所以系统输出的拉式变换为:进行拉式反变换得到系统的时域相应当输入信号为单位阶跃信号时,所以系统输出的拉式变换为:22222110550111()510t+5e ;t K K KT T K Ts s s s Ts s s Ts y t -=-+=-++++=-+进行拉式反变换得到系统的时域相应9.解:由图可知该系统的闭环传递函数为22()(22)2b kG s s k s kτ=+++又因为:2%0.20.52222r n n t k kσξωτω⎧⎪==⎪⎪==⎨⎪=+⎪⎪=⎩ 联立1、2、3、4得0.456; 4.593;10.549;0.104;n K ξωτ==== 所以0.76931.432p ds nt s t sπωξω====10.解:由题可知系统闭环传递函数为210()1010b kG s s s k=++ 221010n nk ξωω=⎧⎪⎨=⎪⎩ 当k=10时,n ω=10rad/s; ξ=0.5;所以有%16.3%0.3630.6p s n e t s t sπξσξω-⎧⎪==⎪⎪⎪==⎨⎪⎪⎪==⎪⎩当k=20时,n ω=14.14rad/s; ξ=0.35;所以有%30.9%0.2430.6ps n e t s t sπξσξω-⎧⎪==⎪⎪⎪==⎨⎪⎪⎪==⎪⎩当0<k<=2.5时,为过阻尼和临界阻尼,系统无超调,和峰值时间;其中调整时间不随k 值增大而变化; 当k>2.5时,系统为欠阻尼,超调量σ%随着K 增大而增大,和峰值时间pt 随着K 增大而减小;其中调整时间s t 不随k 值增大而变化;解,由题可知系统的闭环传递函数为32560-1403256000056014014k 00()1440kb k k k s s s ks kG s s s s k->><<∴=+++∴⎧⎨⎩∴劳斯表系统稳定的充要条件为:解,由题可知系统的闭环传递函数为320.60.8832430.60.80010.20.80.210.8k 00(1)()(1)k b k k k kk s s s ks k s G s s s k s k-->>>>-∴+=++-+∴⎧⎪⎨⎪⎩∴劳斯表系统稳定的充要条件为:20.解:由题可知系统的开环传递函数为(2)()(3)(1)k k s G s s s s +=+-当输入为单位阶跃信号时,系统误差的拉氏变换为11()111()lim limlim ()0k ss k ssss s s k s ss G s E G s ssE G s e →→→+=+===∞∴=又根据终值定理e 又因为解:由题可知系统的开环传递函数为1212()(1)(1)k k k G s T s T s =++当输入为给定单位阶跃信号时1()i X s s=,系统在给定信号下误差的拉氏变换为111211211()111()lim limlim ()11k ss k ss ss s s k s ss G s E G s ssE G s k k e k k →→→+=+===∴=+又根据终值定理e 又因为当输入为扰动信号时1()N s s=,系统扰动信号下误差的拉氏变换为22121122212212121()111()lim limlim ()111k ss k ss ss s s k s ss ss ss ss k G s k T s E G s ssE G s k k k e k k k e e e k k →→→-+-+=+===-∴=+-∴=+=+又根据终值定理e 又因为第四章 根轨迹法掌握轨迹的概念、绘制方法,以及分析控制系统4-2 (2)G(s)=)15.0)(12.0(++s s s K;解:分析题意知:由s(0.2s+1)(0.5s+1)=0得开环极点s 1=0,s 2=-2,s 3=-5。

复数阻抗法
复数阻抗法是一种电路分析方法,它使用复数阻抗来描述电路元件的特性和电路中的电流和电压关系。
在复数阻抗法中,电路中的每个元件都可以用一个复数阻抗来表示,其中实部表示电阻,虚部表示电感或电容。
通过将电路中的复数阻抗相加,可以计算出整个电路的复数阻抗,并根据欧姆定律和基尔霍夫定律求解电路中的电流和电压。
复数阻抗法可以用于分析交流电路中的各种问题,包括电路传输、滤波器设计和功率计算等。
它是电路分析中非常重要的一种技术手段。
- 1 -。

复阻抗法土体密度测试规程一、引言复阻抗法是一种常用的土体密度测试方法,广泛应用于土工工程领域。
本文将介绍复阻抗法土体密度测试的规程和步骤。
二、测试原理复阻抗法是通过测量土体中传播的压缩波速度来确定土体的密度。
根据压缩波速度与土体密度之间的关系,可以推算出土体的密度值。
三、测试设备1. 土壤密度计:用于测量土体中的压缩波速度。
2. 振动器:用于产生压缩波。
四、测试步骤1. 样品制备:从待测试的土体中取得一定量的样品,并进行干燥处理,确保样品的水分含量符合要求。
2. 样品装填:将干燥的土样均匀地填充到土壤密度计的测试仓中。
3. 测试仪器准备:将振动器与土壤密度计连接好,并按照仪器说明书进行准备工作。
4. 参数设置:根据实际情况,设置振动器的频率、振幅等参数。
5. 测试开始:启动振动器,产生压缩波,测量波速。
6. 测试记录:记录每次测试的波速数值,并对结果进行平均处理。
7. 密度计算:根据波速与密度的关系公式,计算出土体的密度值。
8. 结果分析:根据测试结果,对土体的密度进行评估和分析。
五、注意事项1. 样品制备时要保证样品的代表性,避免出现局部密度差异。
2. 测试过程中要确保仪器的准确性和稳定性,避免误差。
3. 测量结果要进行多次重复测试,取平均值,提高结果的可靠性。
4. 在记录测试结果时,要保持准确性和清晰度,避免出现误读或遗漏。
5. 结果分析时要考虑土体的水分含量、颗粒大小等因素对密度测试结果的影响。
六、总结复阻抗法是一种常用的土体密度测试方法,通过测量压缩波速度来确定土体的密度。
在测试过程中,需要注意样品制备、仪器准备、参数设置等细节,并对测试结果进行准确记录和分析。
通过合理的测试规程和步骤,可以得到可靠的土体密度数据,为土工工程提供有力的依据。

复阻抗法求传递函数
复阻抗法是一种常用的求解电路传递函数的方法。
该方法利用复阻抗的性质来简化电路分析过程,使得求解传递函数变得更加容易。
具体来说,复阻抗法将电路中的各个元件抽象成复阻抗,然后利用复阻抗之间的串并联关系来求解电路的传递函数。
复阻抗法的优点是能够快速且准确地求解传递函数,适用于各种类型的电路。
在应用复阻抗法求解电路传递函数时,需要先将电路画成电路图,然后根据电路中的各个元件计算出它们对应的复阻抗。
接下来,根据复阻抗之间的串并联关系,将电路简化成一个等效电路。
最后,根据等效电路的传递函数,求解出整个电路的传递函数即可。
需要注意的是,在实际应用中,复阻抗法可能会遇到一些复杂的电路,导致求解传递函数变得困难。
此时,可以考虑使用其他方法,如节点分析法、Mesh分析法等来求解电路传递函数。
- 1 -。
自动控制原理复阻抗法
一、复阻抗法的原理
复阻抗法是根据控制系统中被控对象的特性来设计控制策略的一种方法。
控制策略的设计基本思想是使被控对象的复阻抗与期望的复阻抗匹配,从而实现系统的稳定和性能的优化。
复阻抗可以表示为一个复数,包括实部和虚部。
在自动控制系统中,
实部反映了系统的稳态特性,虚部反映了系统的动态特性。
因此,通过改
变复阻抗的实部和虚部,可以实现对被控对象的稳态和动态响应的调节。
复阻抗的变化可以通过改变系统的参数或引入控制器来实现。
一般情
况下,可以通过PID控制器来实现复阻抗的调节。
PID控制器包括比例、
积分和微分控制三部分,可以通过调节这三个控制参数来改变系统的复阻抗。
二、复阻抗法的特点
1.灵活性:复阻抗法可以根据被控对象的特性来设计,因此具有很大
的灵活性。
可以通过调节PID控制器的参数来实现对系统响应的调节,从
而达到期望的控制效果。
2.适应性:复阻抗法可以适应不同的被控对象和不同的工作状态。
通
过根据实际需求和被控对象的特性来调节PID控制器的参数,可以实现对
不同工作状态的自适应控制。
3.鲁棒性:复阻抗法通过改变系统的参数来实现对被控对象的调节,
因此具有很好的鲁棒性。
即使在参数发生变化或者干扰存在的情况下,复
阻抗法仍然可以有效地控制系统。
4.可靠性:复阻抗法不依赖于准确的数学模型,而是通过对系统的特
性进行分析和调节来实现控制。
因此,即使在模型不准确或者存在不确定
性的情况下,复阻抗法仍然可以实现良好的控制效果。
三、复阻抗法的应用
复阻抗法广泛应用于各种自动控制系统中,特别是与多个被控对象相
互影响的复杂系统中。
以下是复阻抗法的一些应用场景:
1.机器人控制:由于机器人系统通常包括多个控制对象和多个传感器,因此复阻抗法非常适用于机器人的控制。
可以根据机器人的特性来设计复
阻抗法控制策略,实现对机器人的稳定和精确控制。
2.电力系统控制:电力系统通常由多个发电机、变压器和负荷组成,
存在复杂的互联关系。
复阻抗法可以应用于电力系统的自动控制中,通过
调节发电机和负荷之间的复阻抗来实现电力系统的稳定运行。
3.交通信号控制:交通信号控制系统需要根据交通流量和道路状况来
自动调节信号灯的变化。
复阻抗法可以应用于交通信号控制系统中,以实
现对信号灯的灵活调节和交通流量的高效控制。
总结:复阻抗法是一种常用的自动控制原理,通过改变系统的复阻抗
来实现对被控对象的调节。
它具有灵活性、适应性、鲁棒性和可靠性等特点,在机器人控制、电力系统控制和交通信号控制等领域有广泛应用。
其
优势在于不依赖于准确的数学模型,可以适应各种工作状态和不确定性。