01ABB中级工业机器人应用编程1+X实操题库3考核准备单
- 格式:docx
- 大小:549.28 KB
- 文档页数:3
工业机器人应用编程1+X中级题库含答案一、单选题(共50题,每题1分,共50分)1、下列指令能实现重复运行的是()。
A、DI/DOB、CALLC、LBL/JMP LBLD、FRAME正确答案:C2、一个典型机器视觉系统工作的一般流程,不包括()。
A、图像传输B、图像过滤C、图像捕获D、图像处理正确答案:B3、将机器人的某数字输入信号DI[i]设置为()状态时,在执行了基于待命指令的情况下,检测出超时时,会自动取消待命。
A、仿真跳过功能B、自动运行C、强制输入D、模拟输入正确答案:A4、电子标签正常工作所需要的能量全部是由阅读器供给的,这一类电子标签称为( ) 。
A、半无源标签B、有源标签C、半有源标签D、无源标签正确答案:D5、接近开关能在一定的距离(几毫米~几十毫米)内检测有无物体靠近。
当需要检测铝合金材料的物料感知时,最物美价廉的选择是()。
A、电涡流式接近开关B、光电式接近开关C、霍尔式接近开关D、电容式接近开关正确答案:A6、在FANUC工业机器人控制器中,将CRMA15/CRMA16 I/O板对应DI[101-108]的接口连接8根信号线到PLC的Q0.0~Q0.7接口,若要实现数据流从PLC通过GI[1]传输到机器人,则下列哪一项是正确的地址分配()。
A、将DI[101-128]分配在机架48,槽号1,开始点1,长度为8B、将DI[101-108]分配在机架48,槽号1,开始点1C、将GI[101-108]分配在机架48,槽号1,开始点1D、将GI[1]分配在机架48,槽号1,开始点1,长度为8正确答案:D7、当机器人的运动轨迹需要在现有基础上沿Y轴旋转30°时,可添加指令(),并在每一条运动指令末尾添加OFFSET PR[3]的方法来实现。
A、PR[3,4]=-30B、PR[3,5]=30C、PR[3,2]=-30D、PR[3,3]= 30正确答案:B8、当设备不能接通电源时,第二步是要确认电源单元上的LED灯是否已经亮红灯。
工业机器人应用编程1+X中级模考试题一、单选题(共50题,每题1分,共50分)1、FANUC工业机器人指令中,用于撤销前一步操作的是()。
A、COMMENTB、REPLACEC、UNDOD、FIND正确答案:C2、工具坐标系或用户坐标系的设置被保存在()文件中。
A、SYSGRAME.SVB、FRAMEVAR.SVC、SYSMACRO.SVD、SYSVARS.SV正确答案:A3、下列各项,不属于典型气动系统组成部分的是()。
A、气源部分B、通信元件C、控制元件D、执行元件正确答案:B4、下列位置移转功能,能实现示教位置旋转移转到别的位置的是()。
A、平移B、角度输入移转C、程序移转D、对称移转正确答案:B5、下列属于调用子程序的指令是()。
A、CALLB、JUMPC、SKIPD、COPY正确答案:A6、FANUC工业机器人指令中,用于以升序重新赋予程序中的位置编号的是()A、COMMENTB、REPLACEC、RENUMBERD、FIND正确答案:C7、下列有关工业机器人零点标定的描述中,有误的一项是()。
A、简易零点标定是一种用户可以在任意位置进行零点标定的方法B、只要事先将零点标定数据记录下来,当需要零点标定时,将零点标定数据值直接输入到相关系统变量中即可C、全轴零点标定法是通过目测进行调节,因此零点标定的精度较低D、专用夹具零点标定法,使用专用的零点标定夹具,可进行准确的零点标定正确答案:B8、ROBOGUIDE软件的Tools菜单中,用于创建导轨的是()。
A、Plug In ManagerB、ModelerC、Rail Unit Creator MenuD、Set Interlock正确答案:C9、PLC输入一般是()伏。
A、220VB、110VC、36VD、24V正确答案:D10、S7-1200 CPU所支持的程序块类型有()。
A、FB+FC+DBB、FA+FB+FCC、FB+FC+OBD、FB+FC+OB+DB正确答案:D11、在Robot菜单中,Show Work Envelope用于( )。
工业机器人应用编程职业技能等级(ABB中级)离线编程及验证考核任务书考生须知:1.本任务书共 3 页,如出现任务书缺页、字迹不清等问题,请及时向考评人员申请更换任务书。
2.请仔细研读任务书,检查考核平台,如有模块缺少、设备问题,请及时向考评人员提出。
3.请在45分钟内完成任务书规定内容。
4.由于操作不当等原因引起工业机器人控制器及I/O组件、PLC等的损坏以及发生机械碰撞等情况,将依据扣分表进行处理。
5.考核现场不得携带任何电子存储设备。
6.考核平台参考资料以pdf格式存放在“D:\1+X考核\参考资料”文件夹下。
7.考核过程中,请及时保存程序及数据,保存到“D:\1+X考核\**号工位”指定文件夹中。
8.考核平台已内置部分程序,考生可以直接在平台程序上进行编程。
9.考核时间结束后进行统一评判。
10.请服从考评人员的管理与安排。
场次:工位号:日期:二0二0年十月现有一台工业机器人智能检测和装配工作站,工作站由ABB 工业机器人、上料单元、输送单元、快换装置、立体库、变位机单元、绘图模块、视觉检测单元等组成,智能检测与装配工作站各模块布局如图1所示。
关节坐标系下工业机器人工作原点位置为[0°,-20°,20°,0°,90°,0°]。
绘图模块快换装置立体库RFID检测模块输送带上料单元装配模块变位机视觉模块图1 智能检测与装配工作站模块布局图工作站所用末端工具如图2所示。
其中弧口手爪工具用于取放关节底座、直口手爪工具用于取放电机、吸盘工具用于取放输出法兰。
(1)弧口手爪工具 (2)直口手爪工具 (3)吸盘工具 (4)绘图笔工具图2工业机器人末端工具任务一 工业机器人离线编程打开工业机器人配套仿真软件,导入工业机器人考核平台、工业机器人(型号与考核平台工业机器人一致)、绘图笔工具和绘图模块,搭建如图3所示工业机器人绘图工作站,其中工业机器人安装到考核平台基座上;绘图模块需要面向工业机器人倾斜设置,倾角为29.2°;绘图笔工具安装到工业机器人模型上。
工业机器人应用编程职业技能等级(ABB中级)综合应用编程考核任务书考生须知:1.本任务书共 6 页,如出现任务书缺页、字迹不清等问题,请及时向考评人员申请更换任务书。
2.请仔细研读任务书,检查考核平台,如有模块缺少、设备问题,请及时向考评人员提出。
3.请在75分钟内完成任务书规定内容。
4.由于操作不当等原因引起工业机器人控制器及I/O组件、PLC等的损坏以及发生机械碰撞等情况,将依据扣分表进行处理。
5.考核现场不得携带任何电子存储设备。
6.考核平台参考资料以pdf格式存放在“D:\1+X考核\参考资料”文件夹下。
7.考核过程中,请及时保存程序及数据,保存到“D:\1+X考核\**号工位”指定文件夹中。
8.考核平台已内置部分程序,考生可以直接在平台程序上进行编程。
9.考核时间结束后进行统一评判。
10.请服从考评人员的管理与安排。
场次:工位号:日期:二0二0年十月现有一台工业机器人智能检测与装配工作站,工作站由工业机器人、上料单元、输送单元、快换装置、立体库、变位机、绘图模块、视觉检测、RFID 模块和装配模块组成,智能检测与装配工作站各模块布局如图1所示。
请对工业机器人进行现场编程或离线编程,应用视觉软件对工件模型进行学习训练,对PLC 、HMI 、RFID 进行组态和相关编程,在示教盒中创建并设置机器人控制、相机控制等多个任务,编写工业机器人程序实现一套关节部件的上料、输送、检测、装配和入库过程。
关节坐标系下工业机器人工作原点位置为[0°,-20°,20°,0°,90°,0°]。
绘图模块快换装置立体库RFID 检测模块输送带上料单元装配模块变位机视觉模块图1 智能检测与装配工作站模块布局图工业机器人可选用的末端工具如图2所示,其中弧口手爪工具用于取放关节底座、平口手爪工具用于取放电机、吸盘工具用于取放减速机和输出法兰。
(a )弧口手爪工具 (b )平口手爪工具 (c )吸盘工具 (d )绘图笔工具图2工业机器人末端工具工业机器人智能检测与装配工作站装配零件如图3所示:(a)关节底座(b)电机(c)减速机(d)输出法兰图3装配零件工业机器人关节部件的装配步骤:步骤①:关节底座在装配模块上正确定位;步骤②:电机装配到关节底座中;步骤③:装配好的关节成品返回立体库指定位置。
工业机器人应用编程职业技能等级(ABB中级)综合应用编程考核任务书考生须知:1.本任务书共 6 页,如出现任务书缺页、字迹不清等问题,请及时向考评人员申请更换任务书。
2.请仔细研读任务书,检查考核平台,如有模块缺少、设备问题,请及时向考评人员提出。
3.请在75分钟内完成任务书规定内容。
4.由于操作不当等原因引起工业机器人控制器及I/O组件、PLC等的损坏以及发生机械碰撞等情况,将依据扣分表进行处理。
5.考核现场不得携带任何电子存储设备。
6.考核平台参考资料以pdf格式存放在“D:\1+X考核\参考资料”文件夹下。
7.考核过程中,请及时保存程序及数据,保存到“D:\1+X考核\**号工位”指定文件夹中。
8.考核平台已内置部分程序,考生可以直接在平台程序上进行编程。
9.考核时间结束后进行统一评判。
10.请服从考评人员的管理与安排。
场次:工位号:日期:二0二0年十月现有一台工业机器人智能检测与装配工作站,工作站由工业机器人、上料单元、输送单元、快换装置、立体库、变位机、绘图模块、视觉检测、RFID 模块和装配模块组成,智能检测与装配工作站各模块布局如图1所示。
请对工业机器人进行现场编程或离线编程,应用视觉软件对工件模型进行学习训练,对PLC 、HMI 、RFID 进行组态和相关通信编程,在示教盒中创建并设置机器人控制、相机控制等多个任务,编写工业机器人程序实现一套关节部件的上料、输送、检测、装配和入库过程。
关节坐标系下工业机器人工作原点位置为[0°,-20°,20°,0°,90°,0°]。
绘图模块快换装置立体库RFID 模块输送带上料单元装配模块变位机视觉模块图1 智能检测与装配工作站模块布局图工业机器人可选用的末端工具如图2所示,其中弧口手爪工具用于取放关节底座、平口手爪工具用于取放电机、吸盘工具用于取放减速机和输出法兰。
(a )弧口手爪工具 (b )平口手爪工具 (c )吸盘工具 (d )绘图笔工具图2工业机器人末端工具工业机器人智能检测与装配工作站装配零件如图3所示:(a)关节底座(b)电机(c)减速机(d)输出法兰图3装配零件工业机器人关节部件的装配步骤:步骤①:关节底座在装配模块上正确定位;步骤②:输出法兰装配到关节底座内(嵌入卡槽后顺时针旋转90度锁定);步骤③:装配好的关节成品返回立体库指定位置。
工业机器人应用编程考试1+X证书考试模拟试题2一、单选题1.在完全到达p10后,置位输出信号do1,则运动指令的转角半径应设为?(B)A.z0B.fineC.z102.紧急事件的及时响应,一般使用什么类型的例行程序?(B)A.FunctionB.TRAPC.Procedure3.在示教器的哪个窗口可以查看当前机器人的电机偏移参数(A)。
A.校准窗口B.资源管理器窗口C.系统信息窗口D.控制面板窗口4.校准机器人原点位置时,使用哪种动作模式操作机器人合适?(C)A.重定位运动B.线性运动C.单轴运动D.以上都可以5.关闭机器人控制柜电源后必须等(B)分钟后才可以再次开机。
A.1B.2C.5D.106.手动限速状态下TCP最大速度是?(A)A.250mm/sB.500mm/sC.750mm/sD.1000mm/s7.IF(di1=1anD.di2=1)ORdi3=1Setdo1;当下列哪种情况下,do1为1?(B)A.di1=1、di2=0、di3=0B.di1=0、di2=0、di3=1C.di1=0、di2=1、di3=08.下列程序的IO信号类型的是(C)A.numB.constC.boolD.PERS9.若机器人需要与第三方视觉进行通讯,则需要配置哪个选项?(B)A.FTP/NFSClientB.PC.InterfaceC.FlexPendantInterface10.ABB工业机器人的主电源开关在什么位置?(C)A.机器人本体上B.示教器上C.控制柜上D.需外接11.在完全到达p10后,置位输出信号do1,则运动指令的转角半径应设为?(B)A.z0B.fineC.z1012.在哪个窗口可以改变手动操作时的工具?(B)A.程序编辑器B.手动操纵C.控制面板D.程序数据13.机器人在哪种状态下无法编辑程序?(D)A.自动B.手动限速C.手动全速D.A.和C14.IF(di1=1anD.di2=1)ORdi3=1Setdo1;当下列哪种情况下,do1为1?(B)A.di1=1、di2=0、di3=0B.di1=0、di2=0、di3=1C.di1=0、di2=1、di3=015.在系统信息的哪部分内容下可以查看机器人系统的IP地址?(A)A.控制器属性B.系统属性C.硬件设备D.软件资源16.如果ABB.IRC5示教器的信息栏中机器人显示电机处于开启状态,则示教器的使能器处于(A)状态。
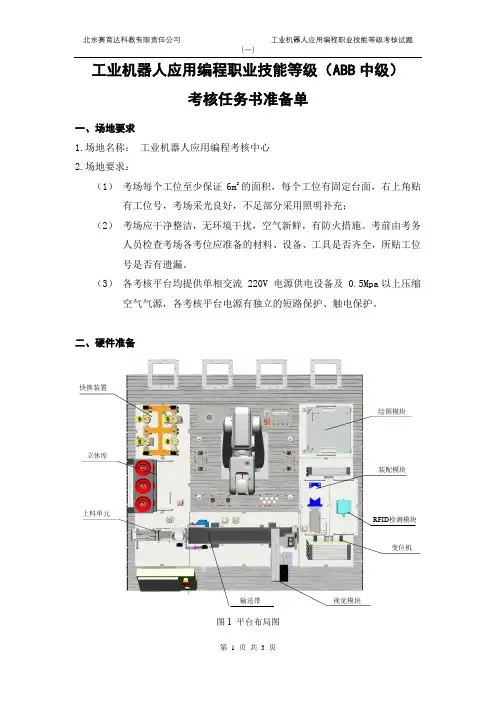
工业机器人应用编程职业技能等级(ABB 中级)考核任务书准备单一、场地要求1.场地名称: 工业机器人应用编程考核中心2.场地要求:(1) 考场每个工位至少保证6m 2的面积,每个工位有固定台面,右上角贴有工位号,考场采光良好,不足部分采用照明补充;(2) 考场应干净整洁,无环境干扰,空气新鲜,有防火措施。
考前由考务人员检查考场各考位应准备的材料、设备、工具是否齐全,所贴工位号是否有遗漏。
(3) 各考核平台均提供单相交流 220V 电源供电设备及 0.5Mpa 以上压缩空气气源,各考核平台电源有独立的短路保护、触电保护。
二、硬件准备绘图模块快换装置立体库RFID 检测模块输送带上料单元装配模块变位机视觉模块图1 平台布局图考核前,技术人员应查看“技术人员资料(考核设备恢复用)”文件夹文档,对照图1布局图,安装好模块,链接好模块电缆。
表1 每个考核设备清单三、软件准备1.软件清单平台配套电脑需要安装如下软件:(1)TIA Portal V15(2)RobotStudio 6.08(3)In-Sight Explorer 5.7.4(4)sscom串口调试助手2.考核环境准备(1)机器人考核环境准备打开工业机器人系统,加载“机器人环境准备”文件中的“ComPLC”程序。
(2)PLC考核环境准备考前准备时PLC平台程序需要提前下载,即利用TIA Portal V15软件打开“ PLC环境准备1+X Lv2 ABB”工程并下载到PLC。
(3)离线编程环境准备将离线编程环境和离线编程模型存放到“D:\1+X考核\离线编程”文件夹中。
四、参考资料准备平台配套电脑需要提前准备如下参考资料,并提前放置在“D:\1+X考核\参考资料”文件夹下:(1)配套工业机器人操作编程手册(2)PLC编程手册(3)1+XABB中级1 IO变量表(4)ABB中级PLC函数库说明(5)1+XABB数据接口器说明五、安全防护用品准备现场操作机器人需穿戴如下安全防护用品:1.工作服(被考人员自带)2.安全帽(考场提供)3.电工鞋(被考人员自带)六、工量具准备被考人员需要自带相关工量具,建议但又不局限于自带如下工量具。
工业机器人操作与运维理论试卷(中级)ABB(100分)1、姓名:【填空题】________________________一、单项选择2、ABB 工业机器人手动运行的快捷设置菜单按钮位于示教器界面的右下角,使用快捷设置菜单可以方便快速的对手动运行状态下的常用参数进行修改和设置,如在( ) 栏中可以设置示教器操作杆速率。
【单选题】(3分)A.运行模式B.增量C.手动操纵D.停止/启动任务正确答案: B3、ABB 工业机器人的( )指令是用于将工业机器人的六个关节轴和外轴(附加轴)移动至指定关节轴绝对位置的运动指令。
【单选题】(3分)A.MoveJB.MoveAbsJC.MoveLD.MoveC正确答案: B4、ABB IRB120 工业机器人6 轴的运动范围是( )。
【单选题】(3分)A.+165°至-165°B.+175°至-175°C.+110°至-110°D.+400°至-400°正确答案: D5、操作ABB 型工业机器人对齐1 轴同步标记时,运动模式需要选择( )。
【单选题】(3分)A.线性B.重定位C.轴4-6D.轴1-3正确答案: D6、I/O 信号控制指令实现工业机器人系统与工业机器人周边设备进行通信。
ABB 工业机器人系统中( )用于将数字输出置位为“1”。
【单选题】(3分)A.Reset 指令B.Set 指令C.SetAO 指令D.SetGO 指令正确答案: B7、ABB 工业机器人系统中紧急停止功能测试包含操作面板和FlexPendant 上的紧急停止按钮,完成测试后,松开紧急停止按钮并按下( ) 按钮来重置紧急停止状态。
【单选题】(3分)A.使能B.电机上电C.启动D.前进一步正确答案: A8、使用ABB 工业机器人示教编程时,( )越大,工业机器人的动作越圆滑与流畅。
【单选题】(3分)A.运动速度B.转弯区数值C.动作幅度D.关节轴转角正确答案: B9、ABB 工业机器人系统中的位置偏移函数是指示工业机器人TCP 以( )为基准,在其X、Y、Z 方向上进行偏移的命令,Offs 指令常用于安全过渡点和入刀点的设置。
工业机器人应用编程1+X中级模拟练习题与答案1、()是电子标签的一个重要组成部分,它主要负责存储标签内部信息,还负责对标签接收到的信号以及发送出去的信号做一些必要的处理。
A、天线B、电子标签芯片C、射频接口D、读写模块答案:B2、下列各机器人指令,属于喷涂指令的是()。
A、 L P1] 80mm/sec GUN ONB、 J PAL_1A_1] 80% FINEC、 WAIT SDI 2] <>OFF,TIMEOUT LBL 1]D、 R1] =WDI1]答案:A3、FANUC工业机器人指令中,用于以升序重新赋予程序中的位置编号的是()A、COMMENTB、REPLACEC、RENUMBERD、FIND答案:C4、安装机器人外部设备时,为保证机器设备的安全,应尽量避开机器人的活动范围,实在由于场地的限制,可采取()措施,以确保安全。
A、防干涉区域设定B、 B.降低运行速度C、设置防护栅栏和安全门D、外围设备可靠接地答案:A5、人机界面产品由硬件和软件两部分组成,其中,硬件部分主要由()组成。
①处理器,②显示单元,③输入单元,④通讯接口,⑤数据存贮单元,⑥画面组态单元,⑦系统输入数据处理单元。
A、①②③④⑤⑥B、①②③④⑤C、①②③④⑤⑥⑦D、①②③④答案:B6、在RFID系统中,电子标签的天线必须满足一些性能要求。
下列几项要求中哪一项不需要满足( )。
A、体积要足够小B、要具有鲁棒性C、价格不应过高D、 D.阻抗要足够大答案:D7、在设置附加轴参数时,设置电动机电流的是()。
A、Motor sizeB、 Motor type settingC、Amplifier current limit settingD、 Motor selection答案:C8、在运用自动系统时,首先必须设法确保作业人员的安全,下列措施,不属于确保人员安全的一项是()。
A、运用机器人系统的各作业人员,应通过专业的课程培训。
工业机器人应用编程1+X中级练习题库及答案1、世界上第一台PLC是由以下()公司研制成功的。
A、SIMENS公司B、FANUC公司C、ABB公司D、GE公司答案:D2、如需通过按用户键tool1来运行名为TEST1的程序,应将该程序分配在设备()上。
A、SUB、UKC、MFD、SP答案:B3、一个典型的机器视觉系统的与人类的视觉环境相似,( )可类比人类的视网膜。
A、镜头B、相机C、图像采集卡D、输入输出单元答案:B4、当PR[4]=Lpos时,PR[4,3]代表的含义是()。
A、 P3]点的J4B、 P4]点的J3C、 P4]点的Z值D、 P3]点的W值答案:C5、气动三大件是大多数气动设备必不可少的气源装置,大多数情况下,三大件组合使用,安装在用气设备的近处,下列各项不属于气动三大件的一项是()。
A、空气过滤器B、减压阀C、油雾器D、气泵答案:D6、ROBOGUIDE软件的Robot菜单中,用于显示机器人各关节工作范围的是()。
A、Lock Teach Tool SelectionB、Show Work EnvelopeC、Teach PendantD、Show Joint Jog Tool答案:D7、FANUC工业机器人指令中,用于在程序编辑页面内对指令的注释进行显示/隐藏切换的是()。
A、COMMENTB、REPLACEC、RENUMBERD、FIND答案:A8、FANUC机器人手动操作,设定DO[101]=ON的步骤有:①点击MENU,选择I/O,;②切换IN/OUT为OUT变量;③切换一览/分配为一览;④按下“类型”,选择数字I/O;⑤选中DO[101],按下F5,即”ON”。
正确的顺序是()。
A、①②③④⑤B、①②④③⑤C、①④③②⑤D、①④⑤②③答案:C9、接近开关能在一定的距离(几毫米~几十毫米)内检测有无物体靠近。
当需要检测铝合金材料的物料感知时,最物美价廉的选择是()。
A、霍尔式接近开关B、电涡流式接近开关C、电容式接近开关D、光电式接近开关答案:B10、GI/GO可以将信号号码作为1个组进行定义,可以将()条信号线作为一个组进行定义。
工业机器人应用编程1+X中级考前练习题与答案1、真空度是指()。
A、绝对压力和相对压力的差值B、当绝对压力低于大气压时,此绝对压力就是真空度C、当绝对压力低于大气压时,此绝对压力与大气压的差值D、大气压与相对压力的差值答案:C2、使用Roboguide创建机器人工作站,选中第一台普通机器人后,在第七步Step 7中,若选择Group 2为一个6轴的工业机器人,那么,机器人控制器实际上控制了()个轴。
A、 12B、 6C、 7D、 2答案:A3、建模时,下列不属于实体间的布尔操作的是()。
A、求和B、求差C、求交D、缝合答案:D4、下列各项,不属于传感器主要组成部分的是()。
A、变送器B、敏感元件C、传感元件D、测验转换电路答案:A5、一个典型机器视觉的图像获取系统不包括()。
A、相机B、镜头C、图像采集卡D、图像处理软件答案:D6、机器视觉系统想要过滤掉包装上的红色文字,宜选用的光源是()。
A、红光B、白光C、蓝光D、紫外光答案:A7、在Roboguide仿真环境中工具抓取或吸取物料时,可以用指令()实现。
A、 PickupB、 PickC、 DropD、 DropDown答案:A8、智能搬运车(AHV)采用()原理。
A、自律分散控制B、IC卡记录搬运路线指示图C、光纤陀螺仪D、无线通信答案:A9、PLC中CPU的STOP工作模式()。
A、不执行程序B、执行一次启动C、C.重复循环执行OBD、是故障标志答案:A10、如果越出了机器人的各轴和各方向的硬件的限位开关,则会出现错误代码()。
A、 SRVO-005 Robot overtravelB、 SRVO-006 Hand BrokenC、 SRVO-004 Fence OpenD、 SRVO 003 Deadman switch released答案:A11、机器人手动设置DO[101]=ON/OFF时,需打开DO一览页面,正确的打开方法是()。
工业机器人应用编程1+X中级复习题与答案1、FANUC工业机器人的动作类型有多种,下列各项用于使机器人TCP点在两个示教点之间做直线运动的是()。
A、JB、LC、AD、C答案:B2、工业机器人性能测试时,应将测量仪器的测量误差写入测试报告中,应写入的测量误差有()。
①计算误差;②仪器安装误差;③仪器测量的系统误差;④机器人重复定位精度误差。
A、①②③④B、①②③C、②③D、①④答案:B3、下列机器人指令中,用于向指定的模拟输出信号输出指定值的是()。
A、AO1]=R1]B、R1]=AO1]C、R1]=AI1]D、AI1]=R1]答案:A4、关于机器人模拟量AI/AO描述,正确的一项是()。
A、模拟量AO只能通过程序的执行来设定模拟输出值B、模拟量AO可通过程序的执行或手动操作来设定模拟输出值C、模拟量AO不能通过手动操作来设定模拟量输出值D、模拟量AO不能通过仿真输出来设定模拟量输出值答案:B5、下列各项,给外界模拟量接口分配一个AI地址,正确的一项是()。
A、机架0,槽号12,开始点1B、机架48,槽号1,开始点1C、机架89,槽号1,通道号1D、机架0,槽号1,通道号1答案:D6、机器人最常用的信号配置就是I/O分配,它是建立机器人的软件端口与外围设备之间关系的重要途径。
下列各项中,表示已经成功激活该地址分配,可正确使用该分配的状态是()。
A、ACTIVEB、PENDC、USINGD、INVAL答案:A7、在执行下面程序第3行指令时,DI[1]=ON,机器人将( )。
1:SKIP CONDITON DI[1]=ON 2:J P[1] 100% FINE 3:J P[2] 1000 mm/sec FINE Skip,LBL[1] 4:J P[3] 50% FINE 5: LBL[1] 6:J P[4] 50% FINEA、中止执行第3指令,跳转到第5行B、中止执行第3指令,执行第4行指令C、执行完第3行指令,跳转到第5行D、执行完第3指令,执行第4行指令答案:B8、一般情况下,系统出现报警时,伺服电源被关断。
1+X工业机器人操作与运维(中级)试题一、单项选择题(共25题,每题2分,共计50分)1. 工业机器人的每个运动轴驱动电机都配备一个什么?(A)A.编码器B.执行器C.传感器2. 什么操作可以修改零点位置信息,是零点位置称为正确的运动基准?(A)A.零点标定B.零点调整C.零点反馈3. 编程模块应该始终保存在什么文件夹中?(A)A.ProgramB.DOIKUC.Meldungen4. 工业机器人的示教器中,有一排轴的移动键,用于移动工业机器人轴,其中A、B、C代表的是以下哪一个选项?(B)A.移动B.旋转C.平移5. 为了防止产生不必要的故障,工业机器人系统断电后,至少需要等到多少时间才能重新打开控制单元电源?(A)A.30秒B.20秒C.50秒6. 当工业机器人在工作的过程中,操作人员按下急停开关,然后在松开急停开关,此时工业机器人会有怎么样的运行动作?(B)A.继续运行B.停止在当前位置C.返回原始位置7. 工业机器人执行程序时是按照什么基准进行运动的?(B)A.初始点B.零点C.最终点8. 当在“T1”模式下运行时,器程序执行的最大速度为多少mm/s?(B)A.300B.250C.4009. 当在示教器中在线编写完程序后,需要通过以下哪一种模式进行测试?(A)A.T1B.AUTC.AUT EXT3. 以下哪一个模式表示,使用示教器进行工业机器人自动运行?(B)A.T1B.AUTC.AUT EXT10. 当工业机器人发生故障后,需要通过哪一种工具进行应急处理?(A)A.自由旋转装置B.气动工具C.气动三联件11.工业机器人可以根据世界坐标系的坐标方向运动,其坐标系又称为什么?(C)A.柱面坐标系B.平面极坐标系C.笛卡尔坐标系12. 笛卡尔创建了什么坐标系?(C)A.直线坐标系B.球面坐标系C.直角坐标系13. 在直角坐标系中,大拇指代表的是那一根轴?(B)A.Y轴B.X轴C.Z轴14. 以下哪种坐标系可以进行后期设置?(C)A.足部坐标系B.法兰坐标系C.工具坐标系15. 以下哪一种场合需要用到关节坐标系?(B)A.移动工业机器人B.将末端引导到目标位置上C.旋转工业机器人16. 多关节工业机器人可以做以下哪一种运动?(C)A.垂直运动B.径向运动C.回转运动17. 工业机器人零点标定的作用是什么?(C)A.工业机器人判断工件的位置。
工业机器人应用编程1+X中级模考试题含答案一、单选题(共50题,每题1分,共50分)1、()分配设定为“从机”时,自动成为I/O连接设备从机模式。
A、UOPB、UTPC、TCPD、ARP正确答案:A2、更换脉冲编码器、SRVO-062 BZAL alarm、SRVO-038 Pulse mismatch、气压异常这几种情况发生时,其中()发生时需要进行零点标定。
A、更换脉冲编码器、SRVO-062 BZAL alarmB、A. SRVO-062 BZAL alarm、SRVO-038 Pulse mismatch、C、SRVO-038 Pulse mismatch、气压异常D、更换脉冲编码器、SRVO-062 BZAL alarm、SRVO-038 Pulse mismatch、气压异常正确答案:D3、下面哪个设备不能接入PLC的输出接口?()A、内存容量B、运行速度C、I/O 点数D、外围设备正确答案:C4、机器人空间是指机器人末端执行器运动描述参考点所能达到的空间点的集合,一般用()表示。
A、垂直投影面B、水平和垂直投影面C、水平投影面D、整个立体空间正确答案:B5、下列I/O状态连接,无法实现的一项是()。
A、ES状态—DOB、RI—ROC、DI—DOD、SI—DO正确答案:B6、以下指令中,用于比较两个数大小的是()。
A、MOVEB、CMPC、CTUD、TON正确答案:B7、roboguide从外部导入的模型,不能作为()使用。
A、PARTSB、FIXTUREC、MACHINED、ROBOT正确答案:D8、下列有关FANUC工业机器人创建工具坐标系的方法中,错误的一项是()。
A、三点法B、四点法C、六点法D、直接输入法正确答案:B9、在进行模拟量输入AI地址分配时,不需要分配的一项是()。
A、机架B、开始点C、通道号D、槽号正确答案:B10、下列关于组信号,有误的一项是()。
A、GI/GO是用来汇总多条信号线并进行数据交换的通用数字信号。
工业机器人应用编程1+X中级考试试题库与答案1、Roboguide中,新建图库的工具是菜单Tools下的()。
A、ModelerB、Use Current Triad LocationC、 C.Actuated CADD、 D.Cell Browser答案:A2、中断指令常与下列()指令一起编程,以便在中断后,在重新触发程序。
A、 FOR R1]=0 TO 3B、JMUP LBL1]C、WAIT DI1]=OND、MESSAGE...]答案:C3、ROBOGUIDE软件的VIEW菜单中,用于把工作站中选中的物体显示在窗口中央的是()。
A、Orthogonal ViewB、Full ViewC、PerspectiveD、Center on Selected Object答案:D4、下列位置移转功能,能实现示教位置旋转移转到别的位置的是()。
A、平移B、对称移转C、程序移转D、角度输入移转答案:D5、下列各指令,()是码垛动作指令。
A、 PALLETIZING-B_1B、 J PAL_1A_1] 80% FINEC、 PALLETIZING-END_1D、 L P1] 80mm/sec Preset1]答案:B6、要返回报警履历画面,按下()。
A、SHIFTB、RESETC、HELPD、VIEW答案:C7、在设置附加轴参数时,设置伺服抱闸号的是()。
A、 Brake NumberB、 Gear RatioC、 Servo Off TimeD、 Motion Sign答案:A8、对于T1方式,若示教速度为2000mm/sec的情况下,若倍率为100%,速度被限制为()。
A、250mm/secB、A.500mm/secC、2000mm/secD、1000mm/sec答案:A9、FANUC R-30iB/R-30iB Mate型机器人UOP自动分配为“完全”或“简略”时,下列()逻辑信号的物理地址是相同的。
国家职业技能认定题库统一试卷工业机器人系统运维员(四级/中级工)操作、编程技能考核试卷(003)(考试时间:180分钟)注 意 事 项1、本试卷依据《国家职业技能标准-工业机器人系统运维员》职业技能标准命制。
2、请按要求在试卷的密封外指定位置填写姓名、班级和所在单位的名称。
3、请仔细阅读各种题目的回答要求,在规定的位置填写您的答案。
4、不要在试卷上乱写乱画,不要在标封区填写无关的内容。
任务一、通过示教编程操作,实现机器人使用手爪工装将零件搬运到翻转台进行装配(1)本题分值:30分 (2)考试时间:60分钟 (3)考核形式:实操、编程 (4)实施设备:综合实训平台 (5)具体要求:操作触摸屏控制翻转台转动到适合装配零件的角度。
机器人通过示教编程实现以下动作:a )机器人抓取工件摆放架上的装配零件(基座),放置到翻转台上的夹紧装置;b )零件放置完成后,机器人运动到一个安全位置,输出信号控制夹紧装置气缸推出,夹紧工件,再分别装配法兰盘和盖板;姓名: 身份证号: 单位:……………………………………………………装…………………………订……………………………线…………………………………………………………………c)装配完成后,控制夹紧装置气缸退回,机器人回到安全位置;d)调试完成后,启动机器人自动运行,运行程序时,不再进行任何人为的干涉;e)图4-1所示为装配零部件,图4-2所示为装配效果图,图4-3为翻转台夹紧装置。
图4-1 装配零部件底座、法兰盘和盖板图4-2 装配效果图图4-3 翻转台夹紧装置(6)安全文明操作。
(7)否定项:若考生发生下列情况之一,则应及时终止考试,考生该任务成绩记为零分。
a)由于操作不当损坏部件或设备;b)由于操作不当造成人身、设备等安全事故。
任务二、通过示教编程操作,实现工业机器人搬运平移任务(1)本题分值:70分(2)考试时间:120分钟(3)考核形式:实操、编程(4)实施设备:工业机器人搬运工作站、料棒、计时器(5)具体要求:机器人通过示教编程实现以下作业任务:通过示教器(盒)对工业机器人进行操作、编程、调试,最终利用所编程序的自动运行,使工业机器人完成从料台与加工台间的单行上、下料各5次,使用1#手爪。
工业机器人应用编程职业技能等级(ABB 中级)
考核任务书准备单
一、场地要求
1.场地名称: 工业机器人应用编程考核中心
2.场地要求:
(1) 考场每个工位至少保证6m 2的面积,每个工位有固定台面,右上角贴
有工位号,考场采光良好,不足部分采用照明补充;
(2) 考场应干净整洁,无环境干扰,空气新鲜,有防火措施。
考前由考务
人员检查考场各考位应准备的材料、设备、工具是否齐全,所贴工位号是否有遗漏。
(3) 各考核平台均提供单相交流 220V 电源供电设备及 0.5Mpa 以上压缩
空气气源,各考核平台电源有独立的短路保护、触电保护。
二、硬件准备
绘图模块
快换装置
立体库
RFID 检测模块
输送带上料单元
装配模块
变位机
视觉模块
图1 平台布局图
考核前,技术人员应查看“技术人员资料(考核设备恢复用)”文件夹文档,对照图1布局图,安装好模块,链接好模块电缆。
表1 每个考核设备清单
三、软件准备
1.软件清单
平台配套电脑需要安装如下软件:
(1)TIA Portal V15
(2)RobotStudio 6.08
(3)In-Sight Explorer 5.7.4
(4)sscom串口调试助手
2.考核环境准备
(1)机器人考核环境准备
打开工业机器人系统,加载“机器人环境准备”文件中的“ComPLC”程序。
(2)PLC考核环境准备
考前准备时PLC平台程序需要提前下载,即利用TIA Portal V15软件打开“ PLC环境准备1+X Lv2 ABB”工程并下载到PLC。
(3)离线编程环境准备
将离线编程环境和离线编程模型存放到“D:\1+X考核\离线编程”文件夹中。
四、参考资料准备
平台配套电脑需要提前准备如下参考资料,并提前放置在“D:\1+X考核\参考资料”文件夹下:
(1)配套工业机器人操作编程手册
(2)PLC编程手册
(3)1+XABB中级3 IO变量表
(4)ABB中级PLC函数库说明
(5)1+XABB数据接口器说明
五、安全防护用品准备
现场操作机器人需穿戴如下安全防护用品:
1.工作服(被考人员自带)
2.安全帽(考场提供)
3.电工鞋(被考人员自带)
六、工量具准备
被考人员需要自带相关工量具,建议但又不局限于自带如下工量具。
表2 建议工量具清单。