正组补偿变焦距镜头的焦距输出函数_金春水
- 格式:pdf
- 大小:281.15 KB
- 文档页数:5


第四章习题4.1 若光波的波长宽度为λΔ,频率宽度为νΔ,试证明:λλννΔΔ=。
设光波波长为nm 8632=.λ,nm 8-10⨯2=λΔ,试计算它的频宽νΔ。
若把光谱分布看成是矩形线型,那么相干长度?=c l证明:参阅苏显渝,李继陶《信息光学》P349,第4.1题答案。
421.510c λνλ∆∆==⨯赫,32010()c c cl ct m ν===⨯∆4.2 设迈克尔逊干涉仪所用的光源为nm 0589=1.λ,nm 6589=.2λ的钠双线,每一谱线的宽度为nm 010.。
(1)试求光场的复自相干度的模。
(2)当移动一臂时,可见到的条纹总数大约为多少?(3)可见度有几个变化周期?每个周期有多少条纹? 答:参阅苏显渝,李继陶《信息光学》P349,第4.2题答案。
假设每一根谱线的线型为矩形,光源的归一化功率谱为 ()^1212rect rect νννννδνδνδν⎡--⎤⎛⎫⎛⎫=+ ⎪ ⎪⎢⎥⎝⎭⎝⎭⎣⎦G (1)光场的复相干度为^1()()exp(2)1sin ()exp(2)[1exp(2)]2r j d c j j τνπντνδντπντπντ∞==+∆⎰G式中12ννν-=∆,复相干度的模为ντπδνττ∆=cos )(sin )(c r 由于νδν∆,故第一个因子是τ的慢变化非周期函数,第二个因子是τ的快变化周期函数。
相干时间由第一个因子决定,它的第一个零点出现在δντ1=c 的地方,c τ为相干时间,故相干长度δλλδλλδντ22≈===cc l c c 。
(2)可见到的条纹总数589301.05893====δλλλcl N (3)复相干度的模中第二个因子的变化周期ντ∆=1,故可见度的变化周期数601.06==∆=∆==δλλδννττc n 每个周期内的条纹数9826058930===n N4.3假定气体激光器以N 个等强度的纵模振荡,其归一化功率谱密度可表示为()()()()∑21-21--=+-1=N N n n NνννδνΔgˆ 式中,νΔ是纵模间隔,ν为中心频率并假定N 为奇数。

光学根底学问:焦点、弥散圆、景深:概念与计算2022/03/30 23:04先介绍几个概念:1、焦点(focus)与光轴平行的光线射入凸透镜时,抱负的镜头应当是全部的光线聚拢在一点后,再以锥状的集中开来,这个聚拢全部光线的一点,就叫做焦点。
2、弥散圆(circle of confusion)在焦点前后,光线开头聚拢和集中,点的影象变成模糊的,形成一个扩大的圆,这个圆就叫做弥散圆。
在现实当中,欣赏拍摄的影象是以某种方式(比方投影、放大成照片等等)来观看的,人的肉眼所感受到的影象与放大倍率、投影距离及观看距离有很大的关系,假设弥散圆的直径小于人眼的鉴别力量,在肯定范围内实际影象产生的模糊是不能识别的。
这个不能识别的弥散圆就称为容许弥散圆(permissible circle of confusion)。
不同的厂家、不同的胶片面积都有不同的容许弥散圆直径的数值定义。
一般常用的是:画幅24mm x 36mm 6cm x 9cm 4“ x5“弥散圆直径0.035mm 0.0817mm 0.146mm35mm 照相镜头的容许弥散圆,大约是底片对角线长度的 1/1000~1/1500 左右。
前提是画面放大为 5x7 英寸的照片,观看距离为 25~30cm。
3、景深(depth of field)在焦点前后各有一个容许弥散圆,这两个弥散圆之间的距离就叫景深,即:在被摄主体(对焦点)前后,其影像仍旧有一段清楚范围的,就是景深。
换言之,被摄体的前后纵深,呈现在底片面的影象模糊度,都在容许弥散圆的限定范围内。
景深随镜头的焦距、光圈值、拍摄距离而变化。
对于固定焦距和拍摄距离,使用光圈越小,景深越大。
以持照相机拍摄者为基准,从焦点到近处容许弥散圆的的距离叫前景深,从焦点到远方容许弥散圆的距离叫后景深。
4、景深的计算下面是景深的计算公式。
其中:前景深ΔL1=FδL2——————f2 + FδLFδL2——————(1)后景深ΔL2=(2) f2 -FδL2f2FδL2ΔL景深ΔL2 += ΔL2=——————f4 - F2δ2L2δ——容许弥散圆直径f ——镜头焦距F ——镜头的拍摄光圈值L ——对焦距离ΔL1——前景深ΔL2——后景深ΔL——景深从公式(1)和(2)可以看出,后景深 > 前景深。

万方数据第1期李永刚.等:红外连续变焦镜头的结构设计61统,共有14片透镜,包括变焦物镜系统和二次成像系统。
镜片数日的增加,有利于校正像差,可提高像质;二次成像系统的作用是为了减小物镜的直径同时保证100%的冷屏效率。
1.2变倍组导向机构选型连续变焦镜头在连续变焦的过程中,光轴随着变倍和补偿镜组的位移始终在跳动,而光轴跳动量的大小直接影响系统的性能指标。
所以变倍、补偿镜组的导向机构设计是此红外变焦距镜头结构设计的核心。
变焦距镜头导向机构的种类很多,按接触摩擦性质可分成两大类:滑动摩擦机构和滚动摩擦机构。
滑动摩擦机构是导轨与移动镜组之间采用滑动接触方式,滚动机构是导轨与移动镜组之间采用滚动方式…。
常用的变倍机构有以下几种形式¨】:1.圆柱导轨滑动机构。
这种结构变倍精度高,径向结构尺寸小,适用于变倍和补偿组光学通光口径较小的结构。
2.两根圆柱导轨滑动机构。
由于滑动部件为两根圆柱导轨,这种结构变倍精度高,承载的负荷也比第一种大。
但是由于是超定位结构,光学通光口径太大,容易产生机构卡死现象,机构的径向尺寸也较大。
一般适用通光口径30—80mm的结构。
3.三根圆柱导轨滑动机构。
这种结构的优点是运动舒适、平稳,不容易产生卡死现象,可以带动通光口径较大的光学组件。
缺点是运动精度较前两种低,一般适用通光口径50—120mm的结构。
滚动摩擦机构就是在上述滑动摩擦机构的基础上,加上精密轴承或者精密钢球等,来减小摩擦力矩,提高系统总体性能。
根据以上经验,本文选用两根圆柱导轨形式,并且在变倍、补偿镜组与圆柱导轨之间采用精密直线轴承配合,使该机构由滑动摩擦变为滚动摩擦。
1.3调焦机构选型调焦组的作用是通过调焦机构,使调焦镜组沿光轴方向移动,以保证在远近不同距离上的物体,都能清晰地成像在像面上。
因此,它的机构优劣直接影响到变焦距镜头的成像质量。
光学系统调焦机构大体有三种方式,一种是凸轮调焦¨1,一种是采用直线电机调焦…,另一种是丝杠丝母调焦。
怎样阅读摄影镜头模量传递函数曲线转载自《摄影与摄像》作者:于琪林李子英现代摄影技术与照相器材的发展,使人们对于摄影镜头成像质量的关注比以往更加强烈。
因此对于镜头分辨率的测试报告,引发了读者极大的兴趣。
然而摄影镜头分辨率数值的高低,并不是检验镜头成像质量的惟一指标,检验镜头成像质量的另一项重要指标,是它的明锐度。
一、分辨率和明锐度是摄影镜的两大重要指标分辨率(Resolution)又称分辨力、鉴别率、鉴别力、分析力、解像力和分辨本领,是指摄影镜头清晰地再现被摄景物纤微细节的能力。
显然分辨率越高的镜头,所拍摄的影像越清晰细腻。
它的单位是“线对/毫米”。
它的优点是可以量化,用数据表示,使结果更直观、更科学、更严密。
明锐度(Acutance)又称鲜锐度、锐度,是摄影镜头鲜明地再现摄景物中间层次、蜕部层次、低反差影纹细节、微弱亮度对比和微妙色彩变化的能力。
明锐度高的镜头,所成影像轮廓鲜明、边缘锐利、反差正常、层次丰富、纹理细腻、影调明朗、质感强烈、色彩过渡柔合、彩色还原真实、自然。
显然以上这些特性是优质摄影镜头不可缺少的素质。
然而摄影镜头的明锐度,很难简单地用数据表示,也很难用普通的仪器测试出来。
人们通常是只凭主观感觉,定性地进行评述。
分辨率和明锐度的综合表现,被称为清晰度(Clarity)。
很明显,分辨率和明锐度是全面评价一只摄影镜头成像质量的两大重要因素。
分辨率高而明锐低的镜头,所成影像轮廓不鲜明,边缘不锐利,反差灰暗、影调平淡,给人的视觉感受反而不清晰。
一些中档日本镜头、很多俄罗斯镜头和多数国产镜头就是如此。
而某些德国镜头,虽然分辨率并不高,但其明锐度相当高,仍不失为一只优秀的镜头。
当然,如果明锐度和分辨率都很高,才真正是一只理想的摄影镜头。
然而这种镜头非常难得,只有经过严格检验并反复挑选的德国名牌定焦摄影镜头和极少数日本名牌摄影镜头,才能兼有这两种素质。
在这里要提到一点是,很多非光学专业的影友用拍摄实物(无论是文字、建筑、风景还是人像)的方法去评价、比较不同镜头的成像质量,他们所得到的结果,往往正是分辨率和明锐度的综合视觉感受,甚至于更多的偏重于明锐度。
光学基础知识:函数MTF解读镜头是摄影师和摄影爱好者投资最高的设备之一,也是决定拍摄质量的最重要的因素。
因此,镜头的质量,历来受到极大的重视。
我们当然会很关心摄影镜头的测量方法。
摄影的最终产品是照片,所以,根据拍摄照片的质量来评价镜头质量,这是我们最先想到的,也是最基本的测试镜头的方法。
实拍照片评价镜头质量的优点是结果直截了当,根据效果判断,比较放心。
不过决定照片质量的客观因素很多,而一张照片的“好”与“坏”又需要人的主观判断,很难通过测量得出客观的定量结果。
大量的事实表明,影响拍摄质量最重要的因素是镜头的分辨率和反差。
反差大小可以通过仪器很容易测量,而分辨率就不那么容易了!现在我们经常采用拍摄标准分辨率板的方法测量镜头的分辨率。
将拍摄了标准分辨率板的底片放到显微镜下人工判读,看最高能够分辩多少线条密度。
分辨率的单位是线对/毫米(lp/mm),一黑一白两条线算是一个线对,每毫米能够分辩出的线对数就是分辨率的数值。
由于这种方法还是要受到胶片分辨率的客观影响和人工判读的主观影响,所以并不是最准确最理想的方法。
现在,让我们从另一个角度出发,将镜头看作一个信息传递系统:被拍摄景物反射出来的光线是它的输入信息,而胶片上的成像就是它的输出信息。
一个优秀的镜头意味着它的输出的像忠实的再现了输入方景物的特性。
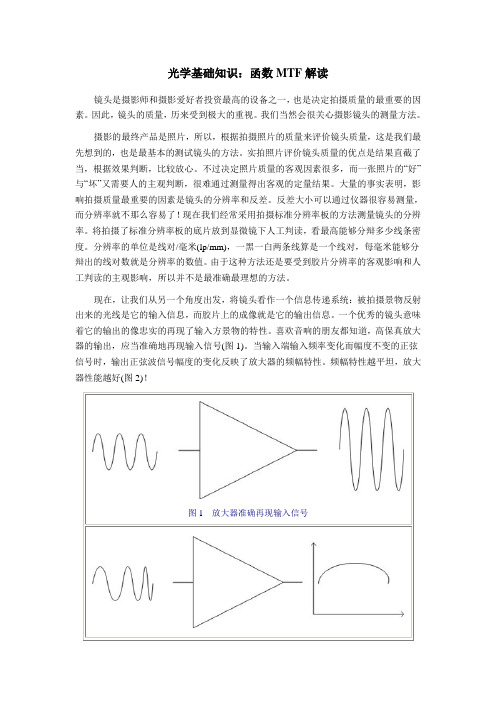
喜欢音响的朋友都知道,高保真放大器的输出,应当准确地再现输入信号(图1)。
当输入端输入频率变化而幅度不变的正弦信号时,输出正弦波信号幅度的变化反映了放大器的频幅特性。
频幅特性越平坦,放大器性能越好(图2)!图1 放大器准确再现输入信号图2 放大器的频幅特性类似的方法也可以用来描述镜头的特性。
由数学证明可知,任何周期性图形都可以分解成亮度按正弦变化的图形的叠加,而任何非周期图形又可以看作是周期图形片断的组合。
因此,研究镜头对正弦变化的图形的反映,就可以研究镜头的性能!亮度按正弦变化的周期图形叫做“正弦光栅”。
PW 法对连续变焦光学系统初始结构的求解崔恩坤;张葆;洪永丰【摘要】T he solving for the initial structure of continuous zoom optical system by using PW method was introduced .The structure was obtained by distributing the power and length be-tween them for each element on the base of the exchange principle of object and image .The PW values were changing for choosing best glass ,controlling aberration ,calculating the shape of glass .Finally an mid-wave infrared zoom system (50 mm~200 mm) was designed according to this method ,the system had 5 lenses with 2 aspherics ,satisfied 100% cold shield efficiency with simplestructure .Moreover ,the initial structure was optimized with Zemax .Result shows that the continuous optical system has high image quality and high energy transmission ,w hich can meet the requirements of practical applications .In conclusion ,the PW solution has practi-cal meaning for the initial structure of zoom optical system design .%介绍了PW法在连续变焦光学系统初始结构求解过程中的应用。