实验25线性系统状态空间分析和运动解
- 格式:docx
- 大小:174.91 KB
- 文档页数:8

《现代控制理论》课程教案一、教学目标1. 了解自动控制系统的概念,理解自动控制的基本原理和特点。
2. 掌握线性系统的状态空间表示,熟悉状态空间方程的求解方法。
3. 学习控制器的分析和设计方法,包括PID控制、状态反馈控制和观测器设计。
4. 学会运用现代控制理论解决实际工程问题,提高系统的稳定性和性能。
二、教学内容1. 自动控制系统的基本概念和原理自动控制系统的定义、分类和性能指标开环控制系统和闭环控制系统的区别与联系2. 状态空间表示及其应用状态空间方程的定义和求解方法状态转移矩阵和初始状态对系统行为的影响状态空间图的绘制和分析3. 控制器的分析和设计PID控制原理及其参数调整方法状态反馈控制和观测器的设计方法控制器设计实例和仿真分析4. 系统的稳定性和性能分析线性时不变系统的稳定判据系统的瞬时响应、稳态响应和频率响应分析系统性能指标的优化方法三、教学方法1. 讲授法:讲解基本概念、原理和方法,阐述重点难点。
2. 案例分析法:分析实际工程案例,让学生学会运用现代控制理论解决问题。
3. 实验法:安排实验课程,让学生动手实践,加深对理论知识的理解。
4. 讨论法:组织课堂讨论,培养学生独立思考和团队协作的能力。
四、教学资源1. 教材:《现代控制理论》,作者:吴启迪、何观强。
2. 课件:PowerPoint 或其他演示软件制作的课件。
3. 实验设备:控制系统实验平台。
4. 仿真软件:MATLAB/Simulink。
五、教学评价1. 平时成绩:课堂表现、作业完成情况和实验报告。
2. 考试成绩:期末考试,包括选择题、填空题、计算题和论述题。
3. 实践能力:实验报告和实际工程问题的解决方案。
六、教学安排1. 课时:共计32课时,其中包括16次课堂讲授,8次实验操作,8次课堂讨论。
2. 授课方式:课堂讲授结合实验操作和课堂讨论。
3. 进度安排:第1-8课时:讲授自动控制系统的基本概念和原理。
第9-16课时:讲解状态空间表示及其应用。
线性系统状态空间分析和运动解状态空间分析方法是一种用来描述线性系统的分析方法。
它将系统的动态特性用一组状态变量来表示,并通过矩阵形式的状态方程进行分析和求解。
状态空间方法是目前广泛应用于自动控制系统设计与分析的一种方法,它可以对系统的稳定性、可控性、可观性以及性能等进行定量分析。
在状态空间分析方法中,首先需要将系统的微分方程表示为矩阵形式的状态方程。
状态方程描述了各个状态变量和它们的变化率之间的关系。
假设系统有n个状态变量x1, x2, ..., xn和m个输入变量u1, u2, ..., um,状态方程可以表示为:dx/dt = Ax + Bu其中,dx/dt是状态变量的变化率,A是状态矩阵,描述状态变量之间的耦合关系,B是输入矩阵,描述输入变量对状态变量的影响。
状态空间分析方法的基本思想是将系统转化为状态空间表达式,然后通过对状态方程进行分析和求解来得到系统的特性和响应。
常见的分析方法包括对系统的稳定性、可控性和可观性进行评估。
稳定性是系统的基本性质之一,用来描述系统在受到扰动时是否能够恢复到平衡状态。
在状态空间方法中,通过研究系统的特征根(或特征值)可以判断系统的稳定性。
特征根是状态方程的解的根,系统的稳定性与特征根的实部有关。
如果特征根的实部都小于零,则系统是稳定的;如果特征根存在实部大于零的情况,则系统是不稳定的。
可控性是指系统是否可以通过输入变量来控制系统的状态变量。
在状态空间方法中,通过可控性矩阵来判断系统的可控性。
如果可控性矩阵的秩等于系统的状态变量个数,则系统是可控的;如果可控性矩阵的秩小于系统的状态变量个数,则系统是不可控的。
可观性是指系统的状态变量是否可以通过观测变量来测量得到。
在状态空间方法中,通过可观性矩阵来判断系统的可观性。
如果可观性矩阵的秩等于系统的状态变量个数,则系统是可观的;如果可观性矩阵的秩小于系统的状态变量个数,则系统是不可观的。
除了稳定性、可控性和可观性外,状态空间分析方法还可以用来分析系统的性能指标,如系统的响应时间、稳态误差和系统的最大误差等。
线性系统理论线性系统理论是一个广泛应用的数学分支,该分支研究线性系统的性质、行为和解决方案。
线性系统可以描述很多现实世界中的问题,包括电子、机械、化学和经济系统等。
在这篇文章中,我们将探讨线性系统理论的基础、应用、稳定性和控制等不同方面。
一、线性系统基础线性系统是一种对于输入响应线性的系统。
当输入为零时,系统的响应为零,称之为零输入响应。
当没有外界干扰时,系统内部存在固有的动态响应,称之为自然响应。
当有外界输入时,系统将对输入做出响应,称之为强制响应。
线性系统具有很多性质,可以让我们更好地理解系统的行为。
其中一个重要的性质是线性可加性,就是说当输入是线性可加的时候,输出也是线性可加的。
换句话说,如果我们有两个输入信号,将它们分别输入到系统中,我们可以在系统的输出中将它们加起来,并得到对应的输出信号。
另外一个重要的性质是时不变性,就是说当输入信号的时间变化时,输出信号的时间变化也会随之发生。
这个性质告诉我们,系统的行为不随着时间的改变而改变。
除此之外,线性系统还有其他很多性质,比如可逆性、稳定性、因果性等等。
二、线性系统的应用线性系统有着广泛的应用,它们可以用来描述很多各种各样的问题,包括但不限于电子电路、航天控制、化学反应、经济系统等等。
下面我们来看看这些应用领域中的具体案例。
1. 电子电路线性系统在电子电路中有着广泛应用。
例如,如果我们想要设计一个低通滤波器,以使高频信号被抑制,我们可以使用线性系统来描述它的行为。
我们可以将电子电路看作一个输入信号到输出信号的转换器。
这个转换器的输出信号可以通过控制电子器件的电流、电压等参数来实现。
这种线性系统可以用来滤掉任何频率的信号,因此在广播和通信中也有广泛的应用。
2. 航天控制航天控制是线性系统理论的一个应用重点。
它包括控制飞行器姿态、轨道以及动力学行为。
在这些问题中,线性可变系统被广泛应用。
这种系统的输出信号是受到飞行器的控制和环境因素的影响。
控制器的任务是计算信号,以引导飞行员和总体系统实现期望的性能和特征。
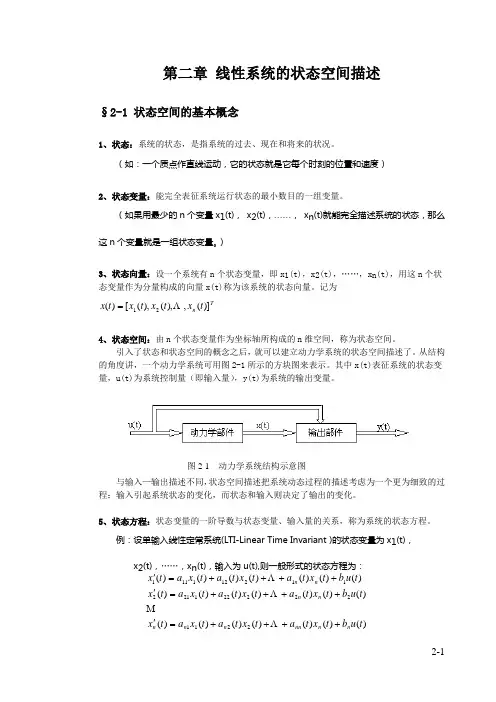
第二章 线性系统的状态空间描述§2-1 状态空间的基本概念1、状态:系统的状态,是指系统的过去、现在和将来的状况。
(如:一个质点作直线运动,它的状态就是它每个时刻的位置和速度)2、状态变量:能完全表征系统运行状态的最小数目的一组变量。
(如果用最少的n 个变量x 1(t), x 2(t),……, x n (t)就能完全描述系统的状态,那么这n 个变量就是一组状态变量。
)3、状态向量:设一个系统有n 个状态变量,即x 1(t),x 2(t),……,x n (t),用这n 个状态变量作为分量构成的向量x(t)称为该系统的状态向量。
记为Tn t x t x t x t x )](,),(),([)(21 =4、状态空间:由n 个状态变量作为坐标轴所构成的n 维空间,称为状态空间。
引入了状态和状态空间的概念之后,就可以建立动力学系统的状态空间描述了。
从结构的角度讲,一个动力学系统可用图2-1所示的方块图来表示。
其中x(t)表征系统的状态变量,u(t)为系统控制量(即输入量),y(t)为系统的输出变量。
与输入—输出描述不同,状态空间描述把系统动态过程的描述考虑为一个更为细致的过程:输入引起系统状态的变化,而状态和输入则决定了输出的变化。
5、状态方程:状态变量的一阶导数与状态变量、输入量的关系,称为系统的状态方程。
例:设单输入线性定常系统(LTI-Linear Time Invariant )的状态变量为x 1(t),x 2(t),……,x n (t),输入为u(t),则一般形式的状态方程为:)()()()()()()()()()()()()()()()()()()()()(2211222221212112121111t u b t x t a t x t a t x a t x t u b t x t a t x t a t x a t x t u b t x t a t x t a t x a t x n n nn n n nn n n n ++++='++++='++++='图2-1 动力学系统结构示意图上式可写成向量—矩阵形式:其中:6、输出方程:在指定系统输出的情况下,该输出与状态变量、输入量之间的函数关系式,称为系统的输出方程。
现代控制理论实验指导书实验一:线性系统状态空间分析1、模型转换图1、模型转换示意图及所用命令传递函数一般形式:)()(1111110nmasasasabsbsbsbsGnnnnmmmm≤++++++++=----MATLAB表示为:G=tf(num,den),其中num,den分别是上式中分子,分母系数矩阵。
零极点形式:∏∏==--=nijmiipszsKsG11)()()(MATLAB表示为:G=zpk(Z,P,K),其中Z,P,K分别表示上式中的零点矩阵,极点矩阵和增益。
传递函数向状态空间转换:[A,B,C,D] = TF2SS(NUM,DEN);状态空间转换向传递函数:[NUM,DEN] = SS2TF(A,B,C,D,iu)---iu表示对系统的第iu个输入量求传递函数;对单输入iu为1;验证教材P438页的例9-6。
求P512的9-6题的状态空间描述。
>> A=[0 1;0 -2];>> B=[1 0;0 1];>> C=[1 0;0 1];>> D=[0 0;0 0];>> [NUM,DEN] = ss2tf(A,B,C,D,1)NUM =0 1 20 0 0DEN =1 2 0>> [NUM,DEN] = ss2tf(A,B,C,D,2)NUM =0 0 10 1 0DEN =1 2 0给出的结果是正确的,是没有约分过的形式P512 9-6>> [A,B,C,D]=tf2ss([1 6 8],[1 4 3])A =-4 -31 0B =1C =2 5D =12、状态方程求解单位阶跃输入作用下的状态响应:G=ss(A,B,C,D);[y,t,x]=step(G);plot(t,x).零输入响应[y,t,x]=initial(G,x0)其中,x0为状态初值。
验证P435的例9-4,P437的例9-5。
9-4A=[0 1;-2 -3];B=[0;0];C=[0 0];D=[0];G=ss(A,B,C,D);[y,t,x]=initial(G,[1;2]);plot(t,x)(设初始状态为[1 ;2])零输入响应00.20.40.60.81 1.2 1.4 1.6 1.82-1-0.50.511.529-5零输入响应A=[0 1;-2 -3];B=[0;1];C=[0 0];D=[0];G=ss(A,B,C,D);[y,t,x]=initial(G,[1;2]);plot(t,x)00.20.40.60.81 1.2 1.4 1.6 1.82-1-0.50.511.52零状态响应,阶跃信号激励下>> A=[0 1;-2 -3];B=[0;1];C=[0 0];D=[0];>> G=ss(A,B,C,D);[y,t,x]=step(G);plot(t,x)00.20.40.60.81 1.2 1.4 1.6 1.8200.050.10.150.20.250.30.350.4总响应>> A=[0 1;-2 -3];B=[0;1];C=[0 0];D=[0];G=ss(A,B,C,D);[y1,t1,x1]=step(G);[y2,t2,x2]=initial(G,[1;2]);>> x=x1+x2;>> plot(t1,x)00.20.40.60.81 1.2 1.4 1.6 1.82-0.500.511.523、系统可控性和可观测性可控性判断:首先求可控性矩阵:co=ctrb(A ,B)。
线性系统理论Matlab 实验报告1、在造纸流程中,投料箱应该把纸浆流变成2cm 的射流,并均匀喷洒在网状传送带上。
为此,要精确控制喷射速度和传送速度之间的比例关系。
投料箱内的压力是需要控制的主要变量,它决定了纸浆的喷射速度。
投料箱内的总压力是纸浆液压和另外灌注的气压之和。
由压力控制的投料箱是个耦合系统,因此,我们很难用手工方法保证纸张的质量。
在特定的工作点上,将投料箱线性化,可以得到下面的状态空间模型:u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-+-=0001.0105.0002.002.08.0. []21,x x y =其中,系统的状态变量x1=液面高度,x2=压力,系统的控制变量u1=纸浆流量u2=气压阀门的开启量。
在上述条件下,试设计合适的状态变量反馈控制器,使系统具有实特征根,且有一个根大于5解:本题目是在已知状态空间描述的情况下要求设计一个状态反馈控制器,从而使得系统具有实数特征根,并要求要有一个根的模值要大于5,而特征根是正数时系统不稳定,这样的设计是无意义的,故而不妨采用状态反馈后的两个期望特征根为-7,-6,这样满足题目中所需的要求。
要对系统进行状态反馈的设计首先要判断其是否能控,即求出该系统的能控性判别矩阵,然后判断其秩,从而得出其是否可控。
Matlab 判断该系统可控性和求取状态反馈矩阵K 的程序,如图1所示,同时求得加入状态反馈后的特征根并与原系统的特征根进行了对比。
图1系统能控性、状态反馈矩阵和特征根的分析程序上述程序的运行结果如图2所示:图2系统能控性、反馈矩阵和特征根的运行结果图2中为图1matlab 程序的运行结果,经过判断得知系统是可控的,同时极点的配置个数与系统状态相符,求得了状态反馈矩阵K 的值,并把原系统的特征根(rootsold )和加入状态反馈后的特征根(rootsnew )进行对比。
同时通过特征值可以看出该系统是稳定的。
2、描述恒速制导导弹的运动方程为:u x x ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=0001000015.000100000005.00005.0-1.0-00010. []x y 01000= 运用ctrb 函数计算系统的能控型矩阵,并验证系统是不可控的;计算从u 到Y 的传递函数,并消去传递函数中的分子和分母公因式,由此可以得到能控的状态空间模型。
线性系统的状态空间分析与综合第九章线性系统的状态空间分析与综合⼀、教学⽬的与要求:通过本章内容的学习,使学⽣建⽴起状态变量和状态空间的概念,掌握线性定常系统状态空间模型的建⽴⽅法,状态空间表达式的线性变换,状态完全能控或状态完全能观测的定义,及其多种判据⽅法,状态转移矩阵的求法,传递函数矩阵与状态空间表达式的关系。
⼆、授课主要内容:1.线性系统的状态空间描述2.线性系统的可控性与可观测性3.线性定常系统的状态反馈与状态观测器(详细内容见讲稿)三、重点、难点及对学⽣的要求(掌握、熟悉、了解、⾃学)1.重点掌握线性定常系统状态空间模型的建⽴⽅法与其他数学描述(微分⽅程、传递函数矩阵)之间的关系。
2.掌握采⽤状态空间表述的系统运动分析⽅法,状态转移矩阵的概念和求解。
3.掌握系统基本性质——能控性和能观测性的定义、有关判据及两种性质之间的对偶性。
4.理解状态空间表达式在线性变换下的性质,对于完全能控或能观测系统,构造能控、能观测标准形的线性变换⽅法,对于不完全能控或不完全能观测系统,基于能控性或能观测性的结构分解⽅法。
5.掌握单变量系统的状态反馈极点配置和全维状态观测器设计⽅法,理解分离定理,带状态观测器的状态反馈控制系统的设计。
重点掌握线性系统的状态空间描述和求解,线性系统的可控性与可观测性及状态反馈与状态观测器。
四、主要外语词汇线性系统 linear system状态空间 state space状态⽅程 state equation状态向量 state vector传递函数矩阵 translation function matrix状态转换矩阵 state-transition matrix可观测标准形 observational standard model可控标准形 manipulative standard model李亚普诺夫⽅程Lyaponov equation状态观测器 state observation machine对偶原理 principle of duality五、辅助教学情况(见课件)六、复习思考题1.什么是系统的状态空间模型?状态空间模型中的状态变量、输⼊变量、输出变量各指什么?2.通过机理分析法建⽴系统状态空间模型的主要步骤有哪些?3.何为多变量系统?如何⽤传递矩阵来描述多变量系统的动态特性?在多变量系统中,环节串联、并联、反馈连接时,如何求取总的传递矩阵?4.试简述数学模型各种表达式之间的对应关系。
广西大学实验报告纸
【实验时间】2014年06月15日
【实验地点】(课外)
【实验目的】
1、掌握线性系统状态空间的标准型、解及其模型转换。
【实验设备与软件】
1、MATLAB数值分析软件
【实验原理】
Matlab提供了非常丰富的线性定常连续系统的状态空间模型求解(即系统运动轨迹的计算)的功能,主要的函数有
①、阶跃响应函数step()可用于计算在单位阶跃输入和零初始状态(条件)下传递函数模型的输出响应,或状态空间模型的状态和输出响应,其主要调用格式为
step(sys,t)
[y,t] = step(sys,t)
[y,t,x] = step(sys,t)
②、脉冲激励下的仿真函数impulse()可用于计算在脉冲刺激输入下传递函数模型的输出响应,或状态空间模型的状态和输出响应,其主要调用格式为
impulse(sys,t)
[y,t] = impulse(sys,t)
[y,t,x] = impulse(sys,t)
③、任意输入激励下的仿真函数lsim()可用于计算在给定的输入信号序列(输入信号函数的采样值)下传递函数模型的输出响应,其主要调用格式为
lsim(sys,u,t,x0)
[y,t,x] = lsim(sys,u,t,x0)
【实验内容、方法、过程与分析】
已知线性系统
1、利用Matlab求零状态下的阶跃响应(包括状态和输出),生成两幅图:第一幅绘制各状态响应曲线并标注;第二幅绘制输出响应曲线。
状态响应曲线:
A=[-21 19 -20;19 -21 20;40 -40 -40];
B=[0;1;2];
C=[1 0 2];
D=[0]; %输入状态空间模型各矩阵,若没有相应值,可赋空矩阵
X0=[0;0;0]; % 输入初始状态
sys=ss(A,B,C,D); %构造传递函数
[y,x,t]=step(sys); % 绘以时间为横坐标的状态响应曲线图
plot(t,x);
grid;
title('状态响应曲线')
输出响应曲线:
A=[-21 19 -20;19 -21 20;40 -40 -40];
B=[0;1;2];
C=[1 0 2];
D=0;
X0=[0;0;0]
[num,den]=ss2tf(A,B,C,D,1);
sys=tf(num,den);
step(sys)
grid
title('输出响应曲线')
2、利用Matlab求零状态下的冲激响应(包括状态和输出),生成两幅图:第一幅绘制各状态响应曲线并标注;第二幅绘制输出响应曲线。
状态响应曲线:
A=[-21 19 -20;19 -21 20;40 -40 -40];
B=[0;1;2];
C=[1 0 2];
D=[]; %输入状态空间模型各矩阵,若没有相应值,可赋空矩阵
x0=[0;0;0]; % 输入初始状态
sys=ss(A,B,C,D); %构造传递函数
[y,x,t]= impulse(sys);
plot(t,x);
grid;
title('状态响应曲线')
输出响应曲线:
A=[-21 19 -20;19 -21 20;40 -40 -40];
B=[0;1;2];
C=[1 0 2];
D=0;
X0=[0;0;0]
[num,den]=ss2tf(A,B,C,D,1);
sys=tf(num,den);
impulse(sys);
grid;
title('输出响应曲线')
3、若控制输入为,且初始状态为,求系统的响应,要求
a.在simulink只能够画出模型求响应,生成两幅图:第一幅绘制各状态响应曲线并标注;第二幅绘制输出响应曲线。
b.编写.m文件求响应,生成两幅图:第一幅绘制各状态响应曲线并标注;第二幅绘制输出响应曲线。
状态响应曲线:
t=[0:0.02:5];
if t>=3
u=1;
else
u=1+exp(-t).*cos(5*t);
end
A=[-21 19 -20;19 -21 20;40 -40 -40];
B=[0;1;2];
C=[1 0 2];
D=[0]; %输入状态空间模型各矩阵,若没有相应值,可赋空矩阵
X0=[0.2;0.2;0.2]; % 输入初始状态
u=(t==0); %就是个条件判断,只有t=0的时候,u才为“1”
sys=ss(A,B,C,D); %构造传递函数
[y,t,x]=lsim(sys,u,t,X0);
plot(t,x);
grid;
title('状态响应曲线')
输出响应曲线:
plot(t,y);
grid;
title('输出响应曲线')
4、以阶跃输入情况下的,分析各模块对响应有什么影响。
5、求系统的传递函数
在MATLAB软件Command Window窗口中输入以下程序A=[-21 19 -20;19 -21 20;40 -40 -40];
B=[0;1;2];
C=[1 0 2];
D=0;
[num,den]=ss2tf(A,B,C,D,1);
printsys(num,den)
程序运行结果为
6、若采用K增益负反馈,绘制闭环根轨迹图,并对根轨迹加以描述说明。
A=[-21 19 -20;19 -21 20;40 -40 -40];
B=[0;1;2];
C=[1 0 2];
D=0;
[num,den]=ss2tf(A,B,C,D,1);
rlocus(num,den);
grid
title('K增益负反馈闭环根轨迹图')
采用K增益负反馈,画出如图所示的根轨迹图。
由图可知,共有3条根轨迹,第一条最终趋于原点;第二条收敛在20~60之间;第三条最终趋于无穷远处。
7、在Matlab中绘制Bode图和Nyquist图,并对图给予说明。
绘制Bode图:
A=[-21 19 -20;19 -21 20;40 -40 -40];
B=[0;1;2];
C=[1 0 2];
D=0;
sys=tf(num,den)
bode(num,den)
grid
title('Bode图')
汇出的波特图如图所示,由图可知,对复制响应分析可得,交越频率在转折频率之后,故复制的变化主要发生在低频段。
对相频特性进行分析,可知此系统的相频特性角度均为负值,并且最后的相角是趋于-90度的。
绘制Nyquist图:
nyquist(sys)
title('Nyquist图')
画出的奈奎斯特图如上所示,根据此图可知,此系统是稳定的系统,由奈奎斯特曲线可以分析出此系统的稳定性。