第二章 线性系统的运动分析
- 格式:ppt
- 大小:1.02 MB
- 文档页数:20
![[计算机软件及应用]2 线性系统运动分析](https://uimg.taocdn.com/3f8e017ebe23482fb4da4c7e.webp)
实验二 线性连续定常系统的运动分析一、实验目的1.掌握线性连续定常系统的状态转移矩阵的求法,学会用MATLAB 求解状态转移矩阵。
2.掌握线性连续定常系统的状态方程的求解方法,学会用MATLAB 求解线性连续定常系统的时间响应,并绘制相应的状态响应曲线和输出响应曲线。
二、实验原理1.线性连续定常系统状态转移矩阵的计算设线性连续定常系统的状态空间表达式为'=+⎧⎨=+⎩x Ax Buy Cx Du ,则其状态转移矩阵为()t t e =A Φ从时间角度看,状态转移矩阵使状态向量随着时间的推移不断地作坐标变换,不断地在状态空间中作转移,故称为状态转移矩阵。
对于线性连续定常系统,其状态转移矩阵与其矩阵指数函数相同,可利用直接求解法、拉氏变换法、标准型法和待定系数法等方法对其进行求解。
(1)直接求解法220111()!2!!tk k k kk t e t t t t k k ∞====+++++∑A A I A A A Φ(2)拉氏变换法()11()t t e L s --⎡⎤==-⎣⎦A I A Φ(3)标准型法对系统矩阵A 进行线性非奇异变换,将其变换为对角线矩阵或约旦矩阵1-=A P AP ,其中P 为非奇异变换阵。
状态转移矩阵为1()t t t e e -==A A P P Φ,其中1-=A P AP若A 的特征值12,,,n λλλ两两互异,则A 为对角线矩阵,此时1110()0n t tt t e t e e e λλ--⎡⎤⎢⎥===⎢⎥⎢⎥⎣⎦A A P P P P Φ 若A 有n 重特征值i λ,则A 为约旦矩阵,此时1111(1)!()0i i i i i ttt n t t tte te t e n t e e te e λλλλλ---⎡⎤⎢⎥-⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦A A Q Q Q Q Φ (4)待定系数法根据凯莱-哈密顿(以下简称C-H )定理,线性连续定常系统的状态转移矩阵为110110()()()()()n tj n j n j t ea t a t a t a t ---====+++∑A A I A A Φ其中,011(),(),,()n a t a t a t -为t 的标量函数,可按A 的特征值确定。
实验二线性系统分析一、实验目的通过实验,掌握线性系统的特性和分析方法,了解系统的幅频特性和相频特性。
二、实验原理1.线性系统线性系统是指遵循叠加原理和比例原理的系统,可以表示为y(t)=h(t)⊗x(t),其中h(t)为系统的冲激响应,x(t)为输入信号,y(t)为输出信号,⊗为线性卷积操作。
2.系统的频域特性系统的频域特性可以通过离散傅里叶变换(Discrete Fourier Transform,简称DFT)来进行分析,DFT是将离散时间域信号变换到离散频域的方法。
3.系统的幅频特性系统的幅频特性描述了输出信号的幅度随频率变化的规律,可以通过对系统的单位冲激响应进行DFT来得到。
4.系统的相频特性系统的相频特性描述了输出信号的相位随频率变化的规律,可以通过对系统的单位冲激响应进行DFT来得到。
三、实验步骤1.准备工作:a.将信号发生器的频率设置为100Hz,幅度设置为5V。
b.将示波器的触发模式设置为自动,并调节水平位置使信号波形居中显示。
2.测量系统的幅频特性:a.将信号发生器的输出信号连接到线性系统的输入端口,将示波器的通道1连接到线性系统的输入端口,将示波器的通道2连接到线性系统的输出端口。
b.调节示波器的时间基准使波形显示在适当的范围内。
c.调节信号发生器的频率和示波器的触发模式,观察输入信号和输出信号的波形。
d.在示波器中进行幅度测量,并记录下输入信号和输出信号的幅值。
e.使用DFT算法对输入信号和输出信号进行频谱分析,得到幅频特性曲线。
f.绘制输入信号和输出信号的幅频特性曲线,并进行比较和分析。
3.测量系统的相频特性:a.调节信号发生器的频率和示波器的触发模式,观察输入信号和输出信号的相位差。
b.在示波器中进行相位测量,并记录下输入信号和输出信号的相位。
c.使用DFT算法对输入信号和输出信号进行频谱分析,得到相频特性曲线。
d.绘制输入信号和输出信号的相频特性曲线,并进行比较和分析。
线性系统状态空间分析和运动解状态空间分析方法是一种用来描述线性系统的分析方法。
它将系统的动态特性用一组状态变量来表示,并通过矩阵形式的状态方程进行分析和求解。
状态空间方法是目前广泛应用于自动控制系统设计与分析的一种方法,它可以对系统的稳定性、可控性、可观性以及性能等进行定量分析。
在状态空间分析方法中,首先需要将系统的微分方程表示为矩阵形式的状态方程。
状态方程描述了各个状态变量和它们的变化率之间的关系。
假设系统有n个状态变量x1, x2, ..., xn和m个输入变量u1, u2, ..., um,状态方程可以表示为:dx/dt = Ax + Bu其中,dx/dt是状态变量的变化率,A是状态矩阵,描述状态变量之间的耦合关系,B是输入矩阵,描述输入变量对状态变量的影响。
状态空间分析方法的基本思想是将系统转化为状态空间表达式,然后通过对状态方程进行分析和求解来得到系统的特性和响应。
常见的分析方法包括对系统的稳定性、可控性和可观性进行评估。
稳定性是系统的基本性质之一,用来描述系统在受到扰动时是否能够恢复到平衡状态。
在状态空间方法中,通过研究系统的特征根(或特征值)可以判断系统的稳定性。
特征根是状态方程的解的根,系统的稳定性与特征根的实部有关。
如果特征根的实部都小于零,则系统是稳定的;如果特征根存在实部大于零的情况,则系统是不稳定的。
可控性是指系统是否可以通过输入变量来控制系统的状态变量。
在状态空间方法中,通过可控性矩阵来判断系统的可控性。
如果可控性矩阵的秩等于系统的状态变量个数,则系统是可控的;如果可控性矩阵的秩小于系统的状态变量个数,则系统是不可控的。
可观性是指系统的状态变量是否可以通过观测变量来测量得到。
在状态空间方法中,通过可观性矩阵来判断系统的可观性。
如果可观性矩阵的秩等于系统的状态变量个数,则系统是可观的;如果可观性矩阵的秩小于系统的状态变量个数,则系统是不可观的。
除了稳定性、可控性和可观性外,状态空间分析方法还可以用来分析系统的性能指标,如系统的响应时间、稳态误差和系统的最大误差等。
第二章:线性系统的运动分析(第四讲)内容介绍:状态方程的解、离散系统的状态方程的解、离散化方法状态方程及其解一般P 个输入,m 个输出的线性定常系统x=Ax+Bu y=Cx (D=0时,称为严格的定常系统) 其中An×n 、Bn×p 、Cm×n 阵, 阵中各元素均为常数。
对此一般系统的分析,本质上为对状态空间表达式的分析。
如果已知x(t)、y(t),则系统运动一目了然。
问题归结为:求解方程 x=Ax+Bu 。
事实上,求解 x=Ax+Bu 完全可利用现成程序。
(但作为专业课了解并掌握状态方程解的求法十分重要,一并介绍常用术语。
)一、齐次方程的解 (输入u=0时)x=Ax 当初值为 x(t)|t=0 = x 0 其解为 x(t)=0x e At ⋅ At e ---A 为n×n 阵,为特定的矩阵函数 事实上,可设其解为 +++++=k k t b t b t b b )t (x 2210则 ++++='-1212k k t kb t b b )t (x 代入方程有:)t b t b t b b (A t kb t b b k k k k +++++=++++-22101212比较有:01Ab b =02122b A Ab b == 02!212b Ab =0323213b A Ab b == 033!31b Ab =011b A )!k (kb k k -=0)!(1b Ak bkk=且t 0=0时x(0) =b 0)0(e )( !1!21e )0(]!1!21[ )0(!1)0(!21)0(x(0) !1!21 x(t)At 22At 222220200x t x t A k t A At I x t A k t A At I t x A k t x A t Ax t b A k t b A t Ab b k k k k k k k k k =+++++=+++++=+++++=+++++=则且(因为 输入u=0 为零输入响应) 引入记号 )(Ate t =Φ 则 )0()()(x t t x ⋅Φ=视 )(Atet =Φ为将x(0)转移到x(t)的变换称其为状态转移阵。
第二章 线性系统的状态空间描述§2-1 状态空间的基本概念1、状态:系统的状态,是指系统的过去、现在和将来的状况。
(如:一个质点作直线运动,它的状态就是它每个时刻的位置和速度)2、状态变量:能完全表征系统运行状态的最小数目的一组变量。
(如果用最少的n 个变量x 1(t), x 2(t),……, x n (t)就能完全描述系统的状态,那么这n 个变量就是一组状态变量。
)3、状态向量:设一个系统有n 个状态变量,即x 1(t),x 2(t),……,x n (t),用这n 个状态变量作为分量构成的向量x(t)称为该系统的状态向量。
记为Tn t x t x t x t x )](,),(),([)(21 =4、状态空间:由n 个状态变量作为坐标轴所构成的n 维空间,称为状态空间。
引入了状态和状态空间的概念之后,就可以建立动力学系统的状态空间描述了。
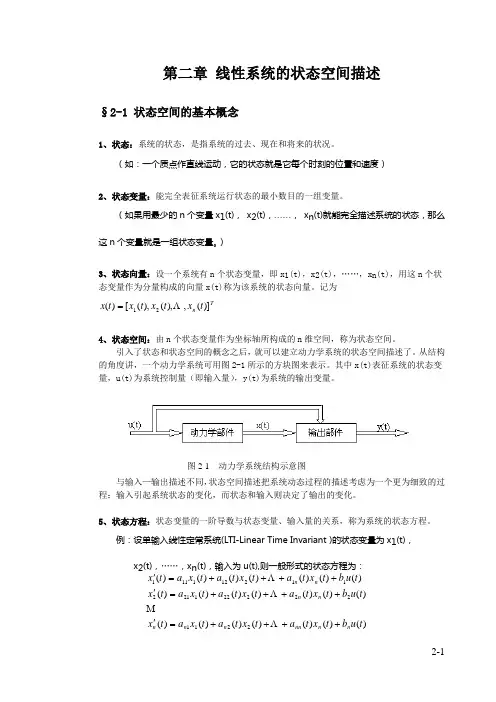
从结构的角度讲,一个动力学系统可用图2-1所示的方块图来表示。
其中x(t)表征系统的状态变量,u(t)为系统控制量(即输入量),y(t)为系统的输出变量。
与输入—输出描述不同,状态空间描述把系统动态过程的描述考虑为一个更为细致的过程:输入引起系统状态的变化,而状态和输入则决定了输出的变化。
5、状态方程:状态变量的一阶导数与状态变量、输入量的关系,称为系统的状态方程。
例:设单输入线性定常系统(LTI-Linear Time Invariant )的状态变量为x 1(t),x 2(t),……,x n (t),输入为u(t),则一般形式的状态方程为:)()()()()()()()()()()()()()()()()()()()()(2211222221212112121111t u b t x t a t x t a t x a t x t u b t x t a t x t a t x a t x t u b t x t a t x t a t x a t x n n nn n n nn n n n ++++='++++='++++='图2-1 动力学系统结构示意图上式可写成向量—矩阵形式:其中:6、输出方程:在指定系统输出的情况下,该输出与状态变量、输入量之间的函数关系式,称为系统的输出方程。