用变分法求解最优控制问题
- 格式:ppt
- 大小:1.91 MB
- 文档页数:14
最优控制问题的变分法解析在控制论中,最优控制问题是寻找系统在给定约束条件下的最佳控制策略,以使所定义的性能指标取得最优值。
变分法是一种重要的数学工具,被广泛应用于解决最优控制问题。
本文将通过对最优控制问题的变分法解析,探讨其原理、应用和解决方法。
一、最优控制问题的基本原理最优控制问题的基本原理可以通过变分法进行分析。
变分法是数学中研究函数极值问题的一种方法,其关键思想是将函数的变分(变化量)与被考察函数的变化率联系起来。
在最优控制问题中,我们希望找到一个控制函数,使得系统的性能指标(如代价函数)取得最优值。
二、最优控制问题的数学描述最优控制问题通常使用微分方程或差分方程来描述系统的动力学行为。
假设系统的动力学方程为:```dx(t)/dt = f(x(t), u(t))```其中,x(t)为系统的状态向量,u(t)为系统的控制向量,f(x(t), u(t))表示系统的动力学行为。
我们的目标是通过选择合适的控制函数u(t)来最小化一个代价函数J,即:```J = ∫ L(x(t), u(t)) dt + Φ(x(T))```其中,L(x(t), u(t))为运动学指标函数,Φ(x(T))为终点状态指标函数。
通过变分法我们可以得到最优控制问题的欧拉-拉格朗日方程:```L_x - d/dt(L_u) = 0```其中,L_x表示L对x的偏导数,L_u表示L对u的偏导数。
三、最优控制问题的解决方法解决最优控制问题的一种常用方法是动态规划。
基本思想是将问题分解为一系列子问题,并利用最优子结构性质递归求解。
通过将最优控制问题转化为一组哈密顿-雅可比-贝尔曼(HJB)方程,可以得到最优控制的解析解。
此外,还可以采用数值方法,如离散化法和优化法,求得数值近似解。
四、最优控制问题的应用领域最优控制问题在许多领域都有着广泛的应用。
在经济学中,最优控制可用于优化投资组合、经济增长模型等;在工程领域,最优控制可用于优化控制系统、自动驾驶等;在生物学中,最优控制可用于优化生态系统管理、生物过程模型等。
变分法与最优控制问题在数学和物理学中,变分法是一种用于求解最优化问题的数学方法,特别适用于求解函数als^565^到l=0的极值点。
最优控制问题是指在给定约束条件下,寻找使得控制系统性能指标最优的控制策略。
本文将介绍变分法与最优控制问题的基本概念和应用。
一、变分法的基本概念变分法是一种通过将问题转化为变分问题,再利用变分法原理对变分问题进行求解的方法。
变分法关注的是函数als^565^的泛函ls^565^= ∫f(als^565^, al'=I0'~I1',其中als^565^是取决于一个或多个独立变量al的函数。
变分问题就是要找到使得泛函ls^565^达到极值的函数als^565^。
二、变分法的应用变分法在数学和物理学中有广泛的应用,特别是在最优控制问题中。
最优控制问题是指在给定的系统模型和性能指标下,寻找使得性能指标最优的控制策略。
变分法在最优控制问题中起到了重要的作用。
在最优控制问题中,我们需要根据系统的状态变量和控制变量,构建系统的数学模型。
然后,通过构建性能指标,将最优控制问题转化为求解一个泛函的极小值问题。
利用变分法的原理,我们可以获得泛函的欧拉-拉格朗日方程,从而得到系统的最优控制策略。
最优控制问题的解决可以为实际应用提供最佳的控制策略。
三、变分法与最优控制问题的应用举例为了更好地理解变分法与最优控制问题,我们举一个简单的例子来说明其应用。
假设有一辆汽车行驶在一段道路上,我们的目标是寻找一种最优的加速度控制策略,使得汽车在最短的时间内到达目的地。
在这个问题中,车辆的位置可以用参数x表示,车辆的速度可以用参数v表示,我们的目标是找到使得到达目的地时间最短的速度曲线v(t)。
首先,我们需要建立车辆的数学模型,这里我们假设车辆的运动服从牛顿第二定律。
通过构建性能指标,我们可以得到泛函的表达式:ls^565^ = ∫[1 + (dht/dt)^2]dt其中dht/dt=t。
最优控制问题的变分方法在数学与控制理论中,最优控制问题是研究如何选择最佳的控制策略,以使系统的性能达到最优的问题。
变分方法便是解决最优控制问题的一种重要数学方法。
一、引言最优控制是控制理论中一个重要的分支,它通过对系统建模和优化理论的应用,旨在找到使系统性能达到最佳的控制策略。
而变分方法,则是解决最优控制问题的一种有效途径。
二、变分法概述变分法是以变分运算为基础的数学方法,在最优控制问题中得到了广泛的应用。
它通过对控制信号进行微小的变分,并得到变分函数的极值来确定最优控制策略。
变分法的基本思想是将最优控制问题转化为求解变分问题,从而得到最优解。
三、变分法的基本原理1. 贝尔曼原理贝尔曼原理是变分法的核心原理之一。
它通过将最优控制问题分解为两个部分,即值函数和最优策略。
通过解反向动态规划方程,可以得到最优策略和值函数。
2. 泛函极值原理泛函极值原理是变分法的另一个重要原理。
它通过对泛函进行变分,并通过求解变分问题来得到泛函的极值。
在最优控制问题中,泛函可以表示系统性能的指标,如性能函数、代价函数等。
四、变分法的应用变分法在最优控制问题中有着广泛的应用。
以下是几个典型的应用领域:1. 高维空间中的最优控制在高维空间中的最优控制问题中,变分法能够通过求解变分问题,得到最优控制策略。
2. 动态规划动态规划是最优控制中一个重要的方法,变分法能够通过解反向动态规划方程,得到最优策略和值函数。
3. 时间最优控制时间最优控制问题中,变分法可以通过求解变分问题,得到最优控制策略以及最小时间。
五、总结变分方法是解决最优控制问题的一种重要数学方法。
它通过对控制信号进行微小的变分,并求解变分问题来得到最优控制策略。
变分法的应用非常广泛,能够解决包括高维空间中的最优控制、动态规划和时间最优控制等问题。
通过变分方法,我们能够有效地求解最优控制问题,并得到系统性能达到最优的控制策略。
最优控制问题的变分方法就是如上所述的一种有效的数学方法。
无穷维空间上的变分方法和最优控制在数学和控制理论中,变分方法和最优控制是两个相关且重要的概念。
它们是为了解决在无穷维空间中的问题而开发的技术和工具。
本文将介绍无穷维空间上的变分方法和最优控制的基本原理和应用。
一、无穷维空间中的变分问题在传统的微分方程理论中,我们通常考虑有限维空间上的问题。
然而,在某些情况下,我们需要考虑无穷维空间上的问题,例如描述连续介质的偏微分方程、描述量子力学的波函数等等。
在无穷维空间上,我们无法通过代数方程来求解问题,而是需要使用变分法。
变分法是一种基于变分原理的数学方法,它通过求解一个函数的极值问题来获得函数的解。
在无穷维空间中,我们需要考虑无穷维函数的变分问题。
其中最基本的概念是泛函,泛函是一个将函数映射到实数的映射。
我们可以定义一个泛函的变分,并通过求解变分问题来得到泛函的极值。
二、无穷维空间中的最优控制最优控制是一种寻找系统在一定性能指标下的最优控制策略的方法。
在有限维空间中,最优控制问题可以使用动态规划等方法求解。
然而,在无穷维空间中,最优控制问题更加复杂。
例如,在描述连续介质的方程中,我们需要确定一个无穷维函数,使得系统在一定约束条件下的性能指标最优。
为了解决无穷维空间中的最优控制问题,我们需要使用变分方法。
首先,我们可以构建一个性能指标函数,它是一个泛函,并且依赖于控制和系统状态。
然后,我们可以通过求解变分问题来得到最优控制策略。
最优控制问题的解通常是一个偏微分方程,这是由于在无穷维空间中,控制策略本身是一个无穷维函数。
三、无穷维变分和最优控制的应用无穷维变分方法和最优控制方法在许多领域中都有广泛的应用。
在物理学中,它们被用来描述量子力学和连续介质的性质。
在工程学中,它们被用来优化控制系统的性能,并设计高级控制策略。
在经济学中,它们被用来优化经济系统的决策和规划。
例如,变分方法和最优控制方法在航空航天领域有重要的应用。
通过应用变分方法,我们可以找到航天器的最佳轨道和姿态控制策略,以实现最佳的任务执行和能源利用。
最优控制问题的变分法解析最优控制问题是应用数学中的一个重要分支,目标是通过对系统的动力学方程和性能指标进行数学建模,找到使性能指标最优化的控制策略。
在寻找最优控制策略的方法中,变分法起到了至关重要的作用。
本文将对最优控制问题的变分法进行解析,介绍其基本原理和应用方法。
一、变分法的基本原理变分法是数学中的一种计算最优化问题的方法,它基于函数的变分性质进行求解。
在最优控制问题中,我们通过变分法来求解函数的最小值,即找到一条函数曲线使得性能指标达到最优。
变分法的基本思想是将函数曲线看作是一个整体,通过对其进行微小的扰动来求解极值。
二、最优控制问题的变分表述最优控制问题通常可以用一组动力学方程和性能指标函数来表述。
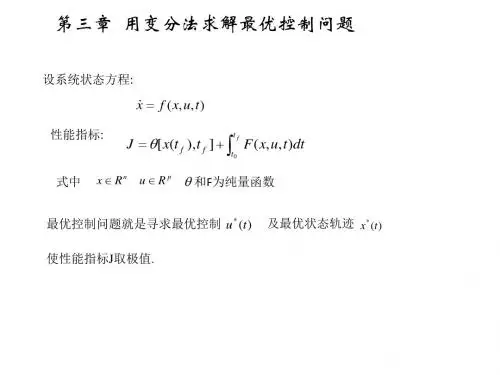
假设已知系统的状态方程为:dx(t)/dt = f(x(t), u(t), t)其中,x(t)表示系统的状态,u(t)表示控制变量,t表示时间。
我们的目标是通过选择合适的控制变量u(t),使得性能指标函数J[x(t), u(t), t]最小化。
性能指标函数通常由目标状态和控制变量的组合表示。
为了求解最优控制问题,首先定义一个泛函:J[u(t)] = ∫L(x(t), u(t), t)dt其中,L(x(t), u(t), t)表示拉格朗日函数,它由性能指标函数和动力学方程组合而成。
通过对泛函J[u(t)]进行变分的方式,我们可以得到最优控制问题的欧拉-拉格朗日方程:δJ[u(t)]/δu(t) = 0三、求解最优控制问题的步骤1. 构建拉格朗日函数L(x(t), u(t), t):根据最优控制问题的具体要求,我们可以选择合适的拉格朗日函数。
通常情况下,拉格朗日函数由系统的动力学方程和性能指标函数组合而成。
2. 求解欧拉-拉格朗日方程:将拉格朗日函数带入欧拉-拉格朗日方程,利用变分法的原理求取控制变量u(t)。
3. 验证最优性条件:通过对极值条件的验证来确定所得到的解是否是最优解。
验证的方法包括极大极小值的判断、边界条件的验证等。
最优控制问题的主要方法最优控制问题是控制理论中的一个重要分支,其目标是在给定系统动力学和性能指标的情况下,寻找最优的控制策略,使系统达到最优性能或目标。
以下是最优控制问题的一些主要方法:1.变分法( Calculus(of(Variations):(变分法是一种数学工具,用于寻找泛函的极值。
在最优控制中,系统的性能指标通常可以表示为一个泛函。
变分法可以通过最小化或最大化泛函来导出最优控制问题的欧拉-拉格朗日方程。
2.动态规划 Dynamic(Programming):(动态规划是一种用于解决具有递归结构且满足最优子结构性质的问题的优化方法。
在最优控制中,动态规划可以用于处理具有离散或连续时间的动态系统,并通过构建状态转移方程来找到最优策略。
3.最优控制理论(Optimal(Control(Theory):(最优控制理论是处理连续时间动态系统最优化问题的数学工具。
它利用微分方程和变分法来分析系统,并确定最优控制策略,以使系统性能指标达到最优。
4.Pontryagin最大值原理( Pontryagin's(Maximum(Principle):(Pontryagin最大值原理是最优控制中的一个重要概念,它提供了寻找连续时间系统最优控制策略的方法。
该原理基于最优控制问题的哈密顿函数和共轭动态系统,通过最大化哈密顿函数来确定最优控制。
5.线性二次型调节器 LQR):(线性二次型调节器是一种针对线性动态系统设计最优控制器的方法。
它通过最小化系统状态和控制输入的二次型代价函数来设计最优控制器。
6.模型预测控制 Model(Predictive(Control,MPC):(模型预测控制是一种基于离散时间模型的最优控制方法。
它使用系统的预测模型来预测未来状态,并通过优化控制序列来实现性能指标的最优化。
这些方法可以根据系统的特性、动力学模型、性能指标和实际应用场景选择和应用。
最优控制问题在工程、经济学、生物学等领域有着广泛的应用,能够优化系统的性能并提高控制效果。