最优控制中的变分法
- 格式:ppt
- 大小:723.50 KB
- 文档页数:44
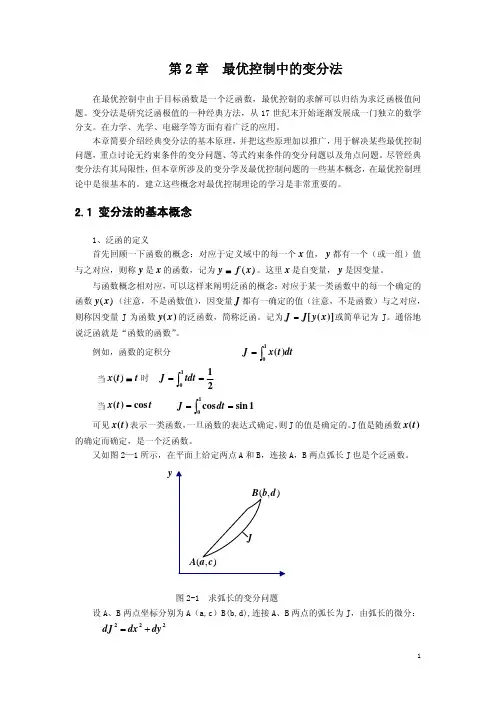
最优控制问题的变分方法在数学与控制理论中,最优控制问题是研究如何选择最佳的控制策略,以使系统的性能达到最优的问题。
变分方法便是解决最优控制问题的一种重要数学方法。
一、引言最优控制是控制理论中一个重要的分支,它通过对系统建模和优化理论的应用,旨在找到使系统性能达到最佳的控制策略。
而变分方法,则是解决最优控制问题的一种有效途径。
二、变分法概述变分法是以变分运算为基础的数学方法,在最优控制问题中得到了广泛的应用。
它通过对控制信号进行微小的变分,并得到变分函数的极值来确定最优控制策略。
变分法的基本思想是将最优控制问题转化为求解变分问题,从而得到最优解。
三、变分法的基本原理1. 贝尔曼原理贝尔曼原理是变分法的核心原理之一。
它通过将最优控制问题分解为两个部分,即值函数和最优策略。
通过解反向动态规划方程,可以得到最优策略和值函数。
2. 泛函极值原理泛函极值原理是变分法的另一个重要原理。
它通过对泛函进行变分,并通过求解变分问题来得到泛函的极值。
在最优控制问题中,泛函可以表示系统性能的指标,如性能函数、代价函数等。
四、变分法的应用变分法在最优控制问题中有着广泛的应用。
以下是几个典型的应用领域:1. 高维空间中的最优控制在高维空间中的最优控制问题中,变分法能够通过求解变分问题,得到最优控制策略。
2. 动态规划动态规划是最优控制中一个重要的方法,变分法能够通过解反向动态规划方程,得到最优策略和值函数。
3. 时间最优控制时间最优控制问题中,变分法可以通过求解变分问题,得到最优控制策略以及最小时间。
五、总结变分方法是解决最优控制问题的一种重要数学方法。
它通过对控制信号进行微小的变分,并求解变分问题来得到最优控制策略。
变分法的应用非常广泛,能够解决包括高维空间中的最优控制、动态规划和时间最优控制等问题。
通过变分方法,我们能够有效地求解最优控制问题,并得到系统性能达到最优的控制策略。
最优控制问题的变分方法就是如上所述的一种有效的数学方法。
最优控制问题的变分法解析最优控制问题是应用数学中的一个重要分支,目标是通过对系统的动力学方程和性能指标进行数学建模,找到使性能指标最优化的控制策略。
在寻找最优控制策略的方法中,变分法起到了至关重要的作用。
本文将对最优控制问题的变分法进行解析,介绍其基本原理和应用方法。
一、变分法的基本原理变分法是数学中的一种计算最优化问题的方法,它基于函数的变分性质进行求解。
在最优控制问题中,我们通过变分法来求解函数的最小值,即找到一条函数曲线使得性能指标达到最优。
变分法的基本思想是将函数曲线看作是一个整体,通过对其进行微小的扰动来求解极值。
二、最优控制问题的变分表述最优控制问题通常可以用一组动力学方程和性能指标函数来表述。
假设已知系统的状态方程为:dx(t)/dt = f(x(t), u(t), t)其中,x(t)表示系统的状态,u(t)表示控制变量,t表示时间。
我们的目标是通过选择合适的控制变量u(t),使得性能指标函数J[x(t), u(t), t]最小化。
性能指标函数通常由目标状态和控制变量的组合表示。
为了求解最优控制问题,首先定义一个泛函:J[u(t)] = ∫L(x(t), u(t), t)dt其中,L(x(t), u(t), t)表示拉格朗日函数,它由性能指标函数和动力学方程组合而成。
通过对泛函J[u(t)]进行变分的方式,我们可以得到最优控制问题的欧拉-拉格朗日方程:δJ[u(t)]/δu(t) = 0三、求解最优控制问题的步骤1. 构建拉格朗日函数L(x(t), u(t), t):根据最优控制问题的具体要求,我们可以选择合适的拉格朗日函数。
通常情况下,拉格朗日函数由系统的动力学方程和性能指标函数组合而成。
2. 求解欧拉-拉格朗日方程:将拉格朗日函数带入欧拉-拉格朗日方程,利用变分法的原理求取控制变量u(t)。
3. 验证最优性条件:通过对极值条件的验证来确定所得到的解是否是最优解。
验证的方法包括极大极小值的判断、边界条件的验证等。