控制工程基础论文(神经网络)有图完整版
- 格式:doc
- 大小:55.50 KB
- 文档页数:7
基于倒立摆的PID神经元网络的控制系统的研究摘要摆系统是一个典型的强耦合、非线性、高阶次的不稳定系统。
由于摆系统的数学模型是在忽略了次要因素的基础上得出来的,而实际上是一个非线性的系统,当系统受到外部的干扰时,这些次要因素的影响比较突出。
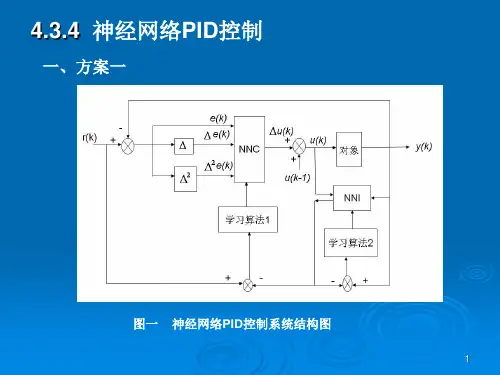
实验采用PID神经元,设计一个神经网络间接自适应控制系统,首先用一个神经网络对摆系统模型进行辨识,辨识完成后,辨识模型的权值与隐层积分元的数值传递给具有同样结构的PID神经元的神经网络控制器,对倒立摆进行自适应控制。
最后根据以上算法,采用6.0编写控制程序,实现对平面一级摆系统的实时控制。
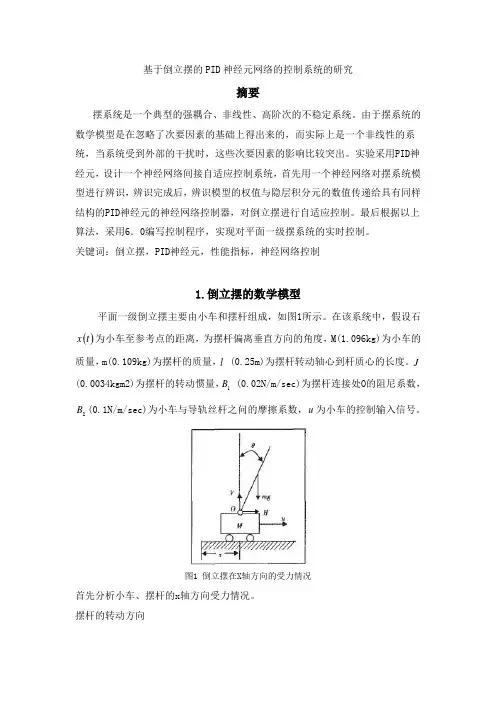
关键词:倒立摆,PID神经元,性能指标,神经网络控制1.倒立摆的数学模型平面一级倒立摆主要由小车和摆杆组成,如图1所示。
在该系统中,假设石()x t为小车至参考点的距离,为摆杆偏离垂直方向的角度,M(1.096kg)为小车的质量,m(0.109kg)为摆杆的质量,l (0.25m)为摆杆转动轴心到杆质心的长度。
J(0.0034kgm2)为摆杆的转动惯量,B (0.02N/m/sec)为摆杆连接处O的阻尼系数,1B(0.1N/m/sec)为小车与导轨丝杆之问的摩擦系数,u为小车的控制输入信号。
2图1 倒立摆在X轴方向的受力情况首先分析小车、摆杆的x轴方向受力情况。
摆杆的转动方向212sin cos d d J B Vl Hl dt dtθθθθ+=- (1) 摆杆的垂直方向22(cos )d l m V mg dtθ=- (2) 摆杆的水平方向,22(cos )d x l m H dt θ+= (3)小车的水平方向222d x dx M B u H dt dt+=- (4) 式中:J —摆杆的转动惯量,2/3J ml =;H 、V —摆杆和小车铰链处的水平与垂直方向的反作用力;12B B 、—小车与导轨之间、摆杆与小车之间的摩擦系数。
消除式(1)、(2)、(3)与(4)中的V 与H ,当θ趋于0时,可以进行线性化处理,即令sin θθ≈,cos 1θ≈,0θ∙≈,整理后得到系统的状态空间方程为[4]2222221222221222010()0()()()()0001()()0()()()x x J ml B mlB m l g J ml x x M J ml mJM J ml mJM J ml mJ M J ml B mlB M m mg M m M J ml mJM J ml mJM J ml mJ θθθθ∙∙∙∙∙∙∙∙⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥-++⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥++++++++⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-++⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦++++++⎣⎦20()mJ u ml M J ml mJ ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥++⎣⎦将参数代人方程之中,可得0100000.08830.62930.04710.88320001000.235727.8285 2.0841 2.3566x x x x θθθθ∙∙∙∙∙∙∙∙⎡⎤⎡⎤⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦⎢⎥⎣⎦(6)简化为:X AX Bu ∙=+(7)同样可得到摆系统在轴方向的数学模型。
第一部分 机器人手臂的自适应神经网络控制
机器人是一具有高度非线性和不确定性的复杂系统,近年来各研究单位对机器人智能控制的研究非常热门,并已取得相当丰富的成果。
机器人轨迹跟踪控制系统的主要目的是通过给定各关节的驱动力矩,使得机器人的位置、速度等状态变量跟踪给定的理想轨迹。
与一般的机械系统一样,当机器人的结构及其机械参数确定后,其动态特性将由动力学方程即数学模型来描述。
因此,可采用经典控制理论的设计方法——基于数学模型的方法设计机器人控制器。
但是在实际工程中,由于机器人模型的不确定性,使得研究工作者很难得到机器人精确的数学模型。
采用自适应神经网络,可实现对机器人动力学方程中未知部分的精确逼近,从而实现无需建模的控制。
下面将讨论如何利用自适应神经网络和李雅普诺夫(Lyapunov )方法设计机器人手臂跟踪控制的问题。
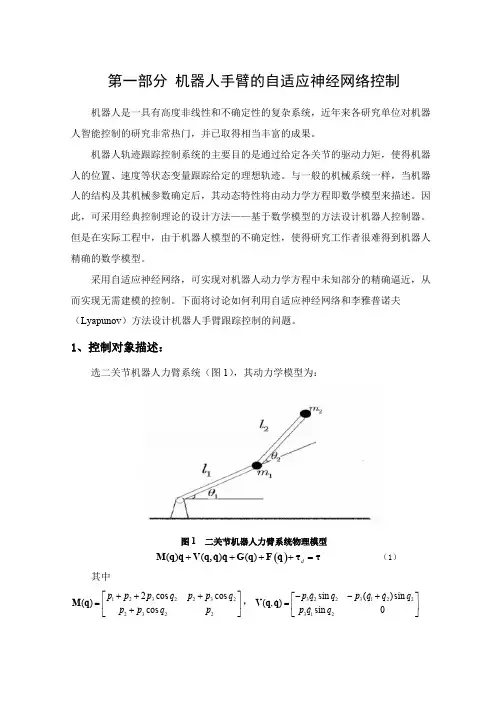
1、控制对象描述:
选二关节机器人力臂系统(图1)
,其动力学模型为:
图1 二关节机器人力臂系统物理模型
(1)
()()()()d ++++=M q q
V q,q q G q F q ττ 其中
,1232
232232
22cos cos ()cos p p p q p p q p p q p +++⎡⎤=⎢
⎥+⎣⎦M q 3223122312
sin ()sin (,)sin 0p q
q p q
q q p q q --+⎡⎤=⎢⎥⎣⎦
V q q
i与神经元j之间的连接强度(模拟生物神经元之间突触连接i的活跃值,即神经元状态;。

神经网络控制HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】人工神经网络控制摘要: 神经网络控制,即基于神经网络控制或简称神经控制,是指在控制系统中采用神经网络这一工具对难以精确描述的复杂的非线性对象进行建模,或充当控制器,或优化计算,或进行推理,或故障诊断等,亦即同时兼有上述某些功能的适应组合,将这样的系统统称为神经网络的控制系统。
本文从人工神经网络,以及控制理论如何与神经网络相结合,详细的论述了神经网络控制的应用以及发展。
关键词: 神经网络控制;控制系统;人工神经网络人工神经网络的发展过程神经网络控制是20世纪80年代末期发展起来的自动控制领域的前沿学科之一。
它是智能控制的一个新的分支,为解决复杂的非线性、不确定、不确知系统的控制问题开辟了新途径。
是(人工)神经网络理论与控制理论相结合的产物,是发展中的学科。
它汇集了包括数学、生物学、神经生理学、脑科学、遗传学、人工智能、计算机科学、自动控制等学科的理论、技术、方法及研究成果。
在控制领域,将具有学习能力的控制系统称为学习控制系统,属于智能控制系统。
神经控制是有学习能力的,属于学习控制,是智能控制的一个分支。
神经控制发展至今,虽仅有十余年的历史,已有了多种控制结构。
如神经预测控制、神经逆系统控制等。
生物神经元模型神经元是大脑处理信息的基本单元,人脑大约含1012个神经元,分成约1000种类型,每个神经元大约与 102~104个其他神经元相连接,形成极为错综复杂而又灵活多变的神经网络。
每个神经元虽然都十分简单,但是如此大量的神经元之间、如此复杂的连接却可以演化出丰富多彩的行为方式,同时,如此大量的神经元与外部感受器之间的多种多样的连接方式也蕴含了变化莫测的反应方式。
图1生物神经元传递信息的过程为多输入、单输出,神经元各组成部分的功能来看,信息的处理与传递主要发生在突触附近,当神经元细胞体通过轴突传到突触前膜的脉冲幅度达到一定强度,即超过其阈值电位后,突触前膜将向突触间隙释放神经传递的化学物质,突触有两种类型,兴奋性突触和抑制性突触。
控制工程基础论文智能控制(intelligent controls)在无人干预的情况下能自主地驱动智能机器实现控制目标的自动控制技术。
对许多复杂的系统,难以建立有效的数学模型和用常规的控制理论去进行定量计算和分析,而必须采用定量方法与定性方法相结合的控制方式.定量方法与定性方法相结合的目的是,要由机器用类似于人的智慧和经验来引导求解过程。
因此,在研究和设计智能系统时,主要注意力不放在数学公式的表达、计算和处理方面,而是放在对任务和现实模型的描述、符号和环境的识别以及知识库和推理机的开发上,即智能控制的关键问题不是设计常规控制器,而是研制智能机器的模型.此外,智能控制的核心在高层控制,即组织控制.高层控制是对实际环境或过程进行组织、决策和规划,以实现问题求解.为了完成这些任务,需要采用符号信息处理、启发式程序设计、知识表示、自动推理和决策等有关技术。
这些问题求解过程与人脑的思维过程有一定的相似性,即具有一定程度的“智能”。
智能控制的主要技术方法及其特点:专家系统专家系统是利用专家知识对专门的或困难的问题进行描述。
用专家系统所构成的专家控制,无论是专家控制系统还是专家控制器,其相对工程费用较高,而且还涉及自动地获取知识困难、无自学能力、知识面太窄等问题. 尽管专家系统在解决复杂的高级推理中获得较为成功的应用,但是专家控制的实际应用相对还是比较少。
模糊逻辑模糊逻辑用模糊语言描述系统,既可以描述应用系统的定量模型也可以描述其定性模型。
模糊逻辑可适用于任意复杂的对象控制。
但在实际应用中模糊逻辑实现简单的应用控制比较容易. 简单控制是指单输入单输出系统(SISO) 或多输入单输出系统(MISO)的控制. 因为随着输入输出变量的增加,模糊逻辑的推理将变得非常复杂.遗传算法遗传算法作为一种非确定的拟自然随机优化工具,具有并行计算、快速寻找全局最优解等特点,它可以和其他技术混合使用,用于智能控制的参数、结构或环境的最优控制。
神经网络文献综述吴一凡(西南交通大学峨眉校区,四川 峨眉 614202)摘 要:本文着重介绍了神经网络的发展、优点及其应用、发展动向,文中着重论述了神经网络目前的几个研究热点,对神经网络有一个全面系统的概括。
关键词:神经网络 模糊控制 遗传算法 专家系统 小波分析Abstract :Development,merits and application of neural network are introduced in this paper. Then,the trends are presented.And its several main research directs.This paper can give you a comprehensive and systematic exposition of the neural network.Keywords :Neural network Fuzzy control Genetic algorithm Expert system Wavelet analysis0 绪论神经网络最早的研究是20世纪40年代心理学家Mcculloch 和数学家Pitts 合作提出的,他们提出的MP 模型拉开了神经网络研究的序幕,其结构如图1所示。
图1 人工神经元示意图图1中,n I I I ,,,21 表示其他n 个神经元的突触输出,n W W W ,,,21 为其他n个神经元的突触连接,其值可正可负,分别表示兴奋性突触和抑制性突触。
∑θ为阀值,神经元的输出()θf 称为变换函数,一般采用的形式有线性函数、阶跃函数、Sigmoid 函数及双曲正切函数等。
神经网络的发展大致经三个阶段:1947~1969年为初期。
在这期间科学家们提出了许多神经元模型和学习规则,如MP模型、HEBB学习规则和感知器等;1970~1986年为过渡期。
这个期间神经网络研究经过了一个低潮,继续发展。
在此期间,科学家们做了大量的工作,如Hopfield教授对网络引入能量函数的概念,给出了网络的稳定性判据,提出了用于联想记忆和优化计算的途径。
1984年,Hiton教授提出Boltzman机模型。
1986年Kumelhart等人提出误差反向传播神经网络,简称BP网络。
目前,BP网络已成为广泛使用的网络;1987年至今为发展期。
在此期间,神经网络受到国际重视,各个国家都展开研究,形成神经网络发展的另一个高潮。
神经网络具有以下优点:1)可以充分逼近任意复杂的非线性关系。
2)具有很强的鲁棒性和容错性,因为信息是分布贮于网络内的神经元中。
3)并行处理方法,使得计算快速。
4)可以处理不确定或不知道的系统,因神经网络具有自学习和自适应能力。
5)具有很强的信息综合能力,能同时处理定量和定性的信息,能很好地协调多种输入信息关系,适用于多信息融合和多媒体技术。
1 神经网络应用现状神经网络以其独特的结构和处理信息的方法,在许多实际应用领域中取得了显著的成效,主要应用如下:1)自动控制领域:神经网络方法已经覆盖了控制理论中的绝大多数问题,主要有系统建模与辨识、PID参数整定、极点配置、内模控制、优化设计、预测控制、最优控制、自适应控制、滤波与预测容错控制、模糊控制和学习控制等。
典型的例子是世纪,20世纪60年代初,美国“阿波罗”登月计划中,Kilmer和Mc-Clloch等人根据脊椎动物神经系统中网状结构的工作原理,提出了一个模型,以使登月车在远距离复杂环境下具有一定的自制能力;2)处理组合问题:最典型的例子是成功地解决了TSP问题,即旅行推销员问题(Travelling Salesman Problem),另外还有最大匹配问题、装箱问题和作业调度等;3)模式识别:已成功应用于手写字符、汽车牌照、指纹和声音识别,还可用于目标的自动识别和定位、机器人传感器的图像识别以及地震信号的鉴别等;4)图像处理:对图像进行边缘监测、图像分割、图像压缩和图像恢复5)传感器信号处理:传感器输出非线性特性的矫正、传感器故障检测、滤波与除噪、环境影响因素的补偿、多传感器信息融合;6)机器人控制:对机器人眼手系统位置进行协调控制,用于机械手的故障诊断及排除、智能自适应移动机器人的导航;7)卫生保健、医疗。
比如通过训练自主组合的多层感知器可以区分正常心跳和非正常心跳网络的波形分类和特征提取在计算机临床诊断中的应用。
8)经济。
能对商品价格、股票价格和企业的可信度等进行短期预测。
9)化工领域。
能对制药、生物化学和化学工程等进行分析。
如:进行蛋白质结构分析、谱分析和化学反应分析等。
10)地理领域。
在遥感图像分类中有广泛的应用,在GIS方面应用人工神经网络理论,提高系统对数据进行复杂的综合分析的功能。
11)另外,在数据挖掘、电力系统、交通、军事、矿业、农业和气象等方面亦有应用。
2 神经网络发展趋势神经计算的基础理论框架以及生理层面的研究仍需深入。
这方面的工作虽然很困难,但为了神经计算的进一步发展却是非做不可的。
增强神经网络的可理解性是神经网络界需要解决的一个重要问题。
这方面的工作在今后若干年中仍然会是神经计算和机器学习界的一个研究热点。
神经计算技术与其他技术尤其是进化计算技术的结合以及由此而来的混合方法和混合系统,正成为一大研究热点。
神经网络用于控制时还有许多问题值得研究:现行的学习算法收敛速度低,存在局部最优问题;分布式并行处理方式的网络内部机理并不清楚,选择网络层数、每层神经元个数,还得凭经验;泛化能力不足,制约了控制系统的鲁棒性;需要创造更适合于控制的专用神经网络;网络建立模算法和控制系统的收敛性与稳定性需进一步研究。
3 神经网络研究热点3.1 神经网络与模糊逻辑的结合模糊逻辑是一种处理不确定性、非线性问题的有力工具。
它比较适合于表达那些模糊或定性的知识,其推理方式比较类似于人的思维方式,这都是模糊逻辑的优点。
但它缺乏有效的自学习和自适应能力。
神经网络具有并行计算、分布式信息存储、容错能力强以及具备自适应学习能力等一系列优点。
但一般来说,神经网络不适于表达基于规则的知识,因此在对神经网络进行训练时,由于不能很好地利用已有的经验知识,常常只能将初始值取为零或随机数,从而增加了网络的训练时间或者陷入非要求的局部极值而将模糊逻辑与神经网络结合,则网络中的各个结点及所有参数均有明显的物理意义,因此这些参数的初值可以根据系统的模糊或定性的知识来加以确定,然后利用学习算法可以很快收敛到要求的输入输出关系,这是模糊神经网络比单纯的神经网络的优点所在。
同时,由于它具有神经网络的结构,因而参数的学习和调整比较容易,这是它比单纯的模糊逻辑系统的优点所在。
模糊神经网络控制已成为一种趋势,它能够提供更加有效的智能行为、学习能力、自适应特点、并行机制和高度灵活性,使其能够更成功地处理各种不确定的、复杂的、不精确的和近似的控制问题。
模糊神经控制包括两个方面:1)基于神经网络的模糊控制:它将模糊系统设计方法与神经网络的连接主义结构和学习方法结合起来,把模糊系统表达成连接主义方式的网络结构,模糊控制的模糊化、模糊推理和解模糊化三个基本过程全都用神经网络来实现;2)模糊神经网络:它在传统的神经网络中增加一些模糊部分,除了具有神经网络的功能外,还能处理模糊信息,完成模糊推理功能。
模糊神经控制的未来研究应集中于以下几个方面:1)研究模糊逻辑与神经网络的对应关系,将对模糊控制器的调整转化为等价的神经网络的学习过程,用等价的模糊逻辑来初始化神经网络;2)完善模糊神经控制的学习算法,以提高控制算法的速度与性能,可引入遗传算法、BP算法中的模拟退火算法等,以提高控制性能;3)模糊控制规则的在线优化,可提高控制器的实时性与动态性能;4)需深入研究系统的稳定性、能控性、能观性以及平衡吸引子、混沌现象等非线性动力学特性;5)关于神经网络与模糊逻辑相结合的研究已有很多,比如用于氩弧焊、机器人控制等。
3.2 神经网络与遗传算法的结合遗传算法是1962年由美国的Hollad提出的。
遗传算法是基于自然选择和基因遗传学原理的全局优化搜索算法,因其简单通用,鲁棒性强,适于并行处理,已成为人们用来解决高度复杂问题的一个新思路和新方法。
目前已被广泛用于许多实际问题。
遗传算法与神经网络的结合主要体现在以下几个方面:网络连接权重的进化训练;网络结构的进化计算;网络结构和连接权重的同时进化;训练算法的进化设计。
基于进化计算的神经网络设计和实现已在众多领域得到应用,如模式识别、机器人控制、财政预测等,并取得了较传统神经网络更好的性能和结果。
但从总体上看,这方面研究还处于初期阶段,理论方法有待于完善规范,应用研究有待于加强提高。
神经网络与进化算法相结合的其他方式也有待于进一步研究和挖掘。
3.3 神经网络与专家系统的结合人工神经网络是基于输入/输出的一种直觉性反射,适于发挥经验知识的作用,进行浅层次的经验推理;专家系统是基于知识、规则匹配的逻辑知识的作用,进行深层次的逻辑推理。
专家系统的特色是符号推理,神经网络擅长数值计算。
因此将两者科学地结合,可以取长补短。
基于神经网络与专家系统的混合系统的基本出发点立足于将复杂系统分解成各种功能子系统模块,各功能子系统模块分别由神经网络或专家系统实现。
其研究的主要问题包括:混合专家系统的结构框架和选择实现功能子系统方式的准则两方面。
由于该混合系统从根本上抛开了神经网络和专家系统的技术限制,是当前研究的热点。
3.4 神经网络与小波分析的结合神经网络与小波分析的结合小波变换是对Fourier分析方法的突破。
它不但在时域和频域同时具有良好的局部化性质,而且对低频信号在频域和对高频信号在时域里都有很好的分辨率,从而可以聚集到对象的任意细节。
目前可以将它与神经网络相结合实现间接辨识与建模。
在结合方法上,可以将小波函数作为基函数构造神经网络形成小波网络,或者以小波变换的多分辨率特性对过程状态信号进行处理,实现信噪分离,并提取出对加工误差影响最大的状态特性,作为神经网络的输入。
4 结论经过近半个世纪的发展,神经网络理论在模式识别、自动控制、信号处理、辅助决策、人工智能等众多研究领域取得了广泛的成功,但其理论分析方法和设计方法还有待于进一步发展。
相信随着神经网络的进一步发展,其将在工程应用中发挥越来越大的作用。
本文只简单介绍了神经网络的神经网络的发展、优点及其应用、发展动向,文中着重论述了神经网络目前的几个研究热点,对神经网络有一个全面系统的概括。
参考文献1.孙增圻,张再兴,邓志东.智能控制理论与技术[M].北京:清华大学出版社.19972.王学武,谭得健.神经网络的应用与发展趋势[J].计算机工程与应用,2003.33.周志华,何佳洲,陈世富.神经网络国际研究动向[J].模式识别与人工智能,2000.13。