等效负载转矩计算
- 格式:ppt
- 大小:914.00 KB
- 文档页数:2
![[说明]电机转动惯量匹配](https://uimg.taocdn.com/7b834108c4da50e2524de518964bcf84b9d52dba.webp)
在伺服系统选型及调试中,常会碰到惯量问题。
其具体表现为:在伺服系统选型时,除考虑电机的扭矩和额定速度等等因素外,我们还需要先计算得知机械系统换算到电机轴的惯量,再根据机械的实际动作要求及加工件质量要求来具体选择具有合适惯量大小的电机;在调试时,正确设定惯量比参数是充分发挥机械及伺服系统最佳效能的前提。
此点在要求高速高精度的系统上表现尤为突出,这样,就有了惯量匹配的问题。
一、什么是“惯量匹配”?1、根据牛顿第二定律:“进给系统所需力矩T = 系统传动惯量J ×角加速度θ角”。
加速度θ影响系统的动态特性,θ越小,则由控制器发出指令到系统执行完毕的时间越长,系统反应越慢。
如果θ变化,则系统反应将忽快忽慢,影响加工精度。
由于马达选定后最大输出T值不变,如果希望θ的变化小,则J应该尽量小。
2、进给轴的总惯量“J=伺服电机的旋转惯性动量JM +电机轴换算的负载惯性动量JL。
负载惯量JL由(以平面金切机床为例)工作台及上面装的夹具和工件、螺杆、联轴器等直线和旋转运动件的惯量折合到马达轴上的惯量组成。
JM为伺服电机转子惯量,伺服电机选定后,此值就为定值,而JL则随工件等负载改变而变化。
如果希望J变化率小些,则最好使JL所占比例小些。
这就是通俗意义上的“惯量匹配”。
二、“惯量匹配”如何确定?传动惯量对伺服系统的精度,稳定性,动态响应都有影响。
惯量大,系统的机械常数大,响应慢,会使系统的固有频率下降,容易产生谐振,因而限制了伺服带宽,影响了伺服精度和响应速度,惯量的适当增大只有在改善低速爬行时有利,因此,机械设计时在不影响系统刚度的条件下,应尽量减小惯量。
衡量机械系统的动态特性时,惯量越小,系统的动态特性反应越好;惯量越大,马达的负载也就越大,越难控制,但机械系统的惯量需和马达惯量相匹配才行。
不同的机构,对惯量匹配原则有不同的选择,且有不同的作用表现。
不同的机构动作及加工质量要求对JL与JM大小关系有不同的要求,但大多要求JL与JM的比值小于十以内。

机电一体化系统设计主观题复习提纲一、填空题1.系统论、、是机电一体化技术的理论基础,是机电一体化技术的方法论。
2.机电一体化的概念已不再局限于某一具体产品的范围,而是扩大到和被控制系统相结合的产品制造和过程控制的大系统,如柔性制造系统、计算机集成制造系统及各种工业过程控制系统。
3.根据不同的使用目的,要求机电一体化系统能对输入的物质、(即工业三大要素)进行某种处理。
4.机电一体化产品不仅是人的手与肢体的延伸,还是人的与的延伸,具有“智能化”的特征是机电一体化与机械电气化在功能上的本质差别。
5.要从、6.要从伺服控制系统稳、、的要求认识机电一体化共性关键技术。
7.构成机电一体化系统的要素或子系统之间必须能顺利地进行物质、能量和信息的传递8.丝杠螺母机构四种基本传动形式包括:螺母固定、丝杆转动并移动,丝杆固定、螺母转动并移动,丝杆转动、螺母移动和螺母转动、丝杆移动9.10.机电一体化系统对机械系统要求是较高的定位精度和良好的动态响应特性11.传感器按其能量传递方式可分为(能量转换型(或发电型传感器))和(能量控制型(或参量型传感器))两种。
12.13.信号不随时间变化而变化或变化很缓慢,而后者所表现的信号随时间的变化而变化。
14.15.16.根据对滑尺绕组供电方式的不同以及对输出信号的检测方式不同,感应同步器分为(鉴相型测量)和(鉴幅型测量)。
17.描述二阶传感器系统动态特性的微分方程中包括的系统参数为静态灵敏度、(固有频率)和(阻尼比)。
1.四、简答题1、机电一体化产品与传统机电产品的主要区别有哪些?参考答案:(1)机电一体化产品功能的实现是所有功能单元共同作用的结果,而传统机电设备中机械与电子系统相对独立,可以分别工作。
(2)机电一体化产品可以用最简单的机械结构来实现高精度的复杂运动,而传统的机电产品必须用十分复杂的机械才能实现,有的甚至根本无法实现。
(3)机电一体化产品具有“柔性”,而传统的机电产品往往是“刚性”的。
机械电子工程课程设计指导书浙江大宁波理工学院目录第一章概述 (2)一、机电专业课程设计目的 (2)二、机电专业课程设计的任务和要求 (2)三、机电专业课程设计的时间及进度安排 (2)第二章课程设计流程分析 (4)一、课程设计的应知与应会 (4)二、课程设计中的创新与综合 (4)三、课程设计的基本流程 (4)第三章总体方案设计 (6)一、驱动控制方式选择 (6)二、传动形式确定 (6)第四章步进电机的参数计算与选型 (7)第一节 步进电动机的分类 (7)第二节 步进电机的参数计算 (8)第三节 常用步进电机特性参数 (13)第五章机械系统设计计算 (21)第一节 齿轮传动副的选用 (21)第二节 滚珠丝杠设计计算 (23)第三节 滚动导轨设计计算 (30)第四节 联轴器的选用 (32)第五节 机械系统装配图基本要求 (33)第六章二坐标工作台数控装置设计与分析 (36)第一节 数控工作台电气原理图设计要求 (36)第二节 步进电机控制电路 (36)第三节 输入/输出通道设计 (39)第四节 人机交互通道配置与接口 (41)第五节 光电隔离电路设计与应用 (44)第六节 电源设计与选择 (48)第七节 典型数控工作台电气原理图分析 (52)第七章设计说明书撰写 (61)一、基本要求 (61)二、主要内容 (61)第八章课程设计资料提交与答辩 (62)一、设计资料提交 (62)二、答辩准备 (62)三、成绩评定 (62)附录 (63)第一章概述一、机电专业课程设计目的本课程设计是学生在完成专业课程学习后,所进行的机电一体化设备设计的综合性训练。
通过该环节达到下列目的:1、巩固和加深专业课所学的理论知识;2、培养理论联系实际,解决工程技术问题的动手能力;3、进行机电一体化设备设计的基本功训练,包括以下10个方面的基本功:1)查阅文献资料; 2)分析与选择设计方案;3)机械结构设计; 4)电气控制原理设计;5)机电综合分析; 6)绘制工程图;7)运动计算; 8)动力计算和精度计算;9)撰写设计说明书; 10)贯彻设计标准。
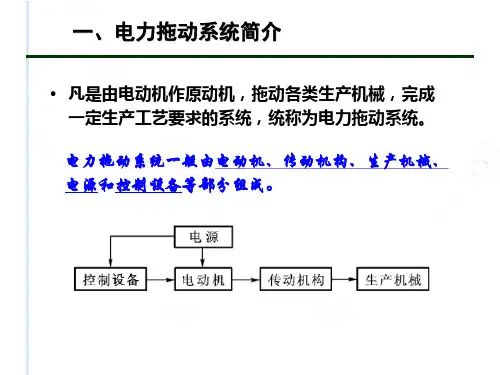
机电有机结合之一---机电一体化系统稳态设计考虑方法一、负载分析机电伺服务系统的被控对象作机械运动时,该被控对象就是系统的负载,它与系统执行元件的机械传动联系有多种形式。
负载的运动形式有直线运动、回转运动、间歇运动等,具体的负载往往比较复杂,为便于分析,常将它分解为几种典型负载,结合系统的运动规律再将它们组合起来,使定量设计计算得以顺利进行。
1.典型负载:包括惯性负载、外力负载、弹性负载、摩擦负载(滑动摩擦负载、粘性摩擦负载、滚动摩擦负载)等。
具体系统的负载可能是以上一种或几种典型负载的组合。
2.负载的等效换算在第二章/第三节齿轮传动比分配的“等效转动惯量最小原则”中曾提高过等效转动惯量的计算方法,本节将更详细地讨论。
为使执行元件的额定转矩(或力、功率)、加减速控制等,与被控对象的固有参数(如质量、转动惯量等)相互匹配,需要将被控对象相关部件的固有参数及其所受的负载(力或转矩等)等效换算到执行元件的输出轴上,即计算其输出轴承受的等效转动惯量和等效负载转矩(回转运动)或计算等效质量和等效力(直线运动)。
F面以图示的机床工作台伺服进给系统为例加以说明。
所示系统由一个移动部件和n个转动部件组成。
M、v和F分别为移动部件的质量(kg)、运动速度(m⑸和所受的负载力(N);Jj、nj(j)和Tj分别为转动部件的转动惯量(kgm2)、转速(r/min或rad/s)和所受负载转矩(N m)。
(1)求等效转动惯量Jeq,根据能量守恒定律有:丄/ 加二丄十驹r r丄亠J J』七£尸】所叭等效转动惯量为:J2 “ — l 歿丿 用工程上常用单佞时,可拓上式改写为血丿J A 血丿 r=—4兀~ 移动部分为丝杠螺母传动时:跟丝杠连接的齿轮是第 n 个齿轮:(2)求等效负载转矩Teq 上述系统在时间t 内克服负载所作功的总和等于执行元件所做功,即:⑴心凤—土巧呼 户!所以*等效贡菽轻矩为:f 廿、寸 丄;*工r;7S 1用工程上常用单位时,可特上式改写为 —F — 2彳”:F tLyr/|^ ■ B 1速比之间的关系参见前面等效转动惯量部分。
10.16638/ki.1671-7988.2021.06.029变速箱中不同轮系等效转动惯量的计算方法吉丹霞,陈潇,严思敏(陕西法士特齿轮有限责任公司,陕西西安710119)摘要:在配有同步器的重型汽车或拖拉机等负载较大的车辆上经常需要考虑等效转动惯量,通过得出变速器等效转动惯量来计算等效转矩,从而获得准确的发动机输入转矩,文章通过给出变速箱中不同轮系下等效转动惯量的计算方法,从而为后续准确计算等效转动惯量提供参考,为准确判断发动机性能提供可靠依据。
关键词:变速器;等效转动惯量;计算方法中图分类号:U463.212 文献标识码:A 文章编号:1671-7988(2021)06-93-03Calculation Method for Equivalent Moment of Inertia of Different GearTrains in GearboxJi Danxia, Chen Xiao,Yan Simin( Shaanxi Fast Gear Co., Ltd., Shaanxi Xi’an 710119 )Abstract: The equivalent moment of inertia often needs to be considered in the heavy-duty vehicle or tractor equipped with synchronizer. The equivalent moment of inertia of the transmission is obtained to calculate the equivalent torque, so as to obtain the accurate engine input torque. In this paper, the calculation method for the equivalent moment of inertia of different gear trains in gearbox is given, so as to provide a reference for the subsequent accurate calculation of the equivalent moment of inertia and provide a reliable basis for accurately judging the engine performance.Keywords: Transmission; Equivalent moment of inertia; Calculation methodCLC NO.: U463.212 Document Code: A Article ID: 1671-7988(2021)06-93-03前言在变速器设计优化中,转动惯量作为设计优化的重要参数之一,对整车性能的改善具有重要意义。
1、 履带电机选型设定机器人的行走速度为1m/s ,履带直径d=300mm ,因此从履带齿轮出来的转速rpm r v T n 6460*)15.0*14.3*2/(360*12/2//1=====ππω,考虑机器人的总重量m=15kg ,底面有两根履带,由于机器人行走时受到摩擦力作用,在此设定其摩擦系数5.0=μ,则所需力矩M=m N m N mgr ⋅=⋅=6.515.0*10*5.7*5.0μ,基于上述计算得出以下两个关键数据:从履带齿轮出来的转速:n=64rpm ;履带上需提供的扭矩T=5.6N.m ; 电机功率计算:首先计算出电机负载功率,****0.5*7.5*10*137.5p f v m g v w μ====,经初步估计电机经减速箱的减速比不会很大因此将减速箱的传动效率设定为0.8,将中间机械结构的传动效率设定为0.5,因此这个传动结构的机械效率0.8*0.5*0.4η==,由此根据电机功率传递不变原则,计算出电机功率/37.5/0.32117p p w η===负载,在此设定电机功率为150w 。
由于所选电机功率为150w 且所选电机为直流有刷伺服电机,暂选定电机的额定电压为24V,基于此两项可选定RE 40系列中订货号为:148867的电机;额定转速为6930rpm ,根据履带出来转速可知总传动比6930/64109i ==。
电机扭矩校核:考虑传动机构中的传动损耗,应有M=**T i η额定转矩=0.17*0.4*109=7.4Nm 大于负载扭矩满足要求。
综上所述,选取电机型号为:RE 40系列中订货号为:148867的电机;总减速比为109,功率为150w 。
这个减速比为减速箱和中间齿轮这两者减速比之积。
电机参数 单位 额定电压下数值 额定电压 v 24 空载转速 rpm 7580 空载电流 mA 137 额定转速 rpm 6930 额定转矩 mNm 170 额定电流 A 5.77 堵转扭矩 mNm 2280 堵转电流 A 75.7 最大效率%912、 提升电机选型机器人的质量为15kg ,考虑到机器人可能出现陷入泥泞中这种特别糟糕的情况,因此将每个电机负载设定为150N,将电机提升机器人的速度设定为0.5m/s ;因此负载功率为75w ,其中中间传动过程存在传动效率问题,主要有减速箱的传动效率、中间机械结构的传动效率,在此设定减速箱的传动效率为80%(基于上述值做粗略估算),中间机械结构(蜗轮蜗杆)的传动效率为50%,因此电机功率P=75/(0.8*0.5)=187W ;由于订货单中无200w 直流有刷电机,因此粗略估算电机功率选定为250w 。
<机电一体化复习题和答案>一.填空I. 通常一个较完善的机电一体化系统包含:动力___________ 、执行器_____________ 、传感器、计算机________________________和_________________ 五部分。
2传感器的静态特性指标主要有:线性度___________ 、灵敏度、迟滞度、分辨力______________ 和重复度_______________ 等。
3. 电感式位移传感器是通过检测电感量的变化来检测被测量的位移。
4. 滚珠丝杠副中采用双螺母是为了便于螺旋弧轴向_______________ 间隙的调整。
5. 在光栅式位移传感器中,莫尔条纹对光栅的栅距起到了放大作用。
6. 谐波齿轮传动的三个主要部件是:刚轮 ___________ 、柔轮和谐波发生器________ 。
7. 直流伺服电机的优点是稳定性好、可靠性好、响应速度快和扭矩大______________无刷直流伺服电动机的优点是无换向器、可控性好和稳定性好—等。
8. 机电一体化技术是机械与微电子的结合;10. 传感器的灵敏度反映了被测量的数值处在稳定状态时,输出量的变化量与输入量______ 的变化量的比值。
II. 电容式位移传感器是将被测物理量转换为电容变化的装置。
12. 滚珠丝杠副中滚珠的循环方式有内循环和外循环两种。
13. 测速发电机的负载电阻越大,其线性度越好。
14. 步进电机的步距角指在电脉冲 _______ 的作用下,电机转子转过的角位移。
15、直流伺服电机的机械特性指当电枢电压一定时,转矩与转速之间的关系;调节特性指在负载转矩一定时,电枢电压与转速之间的关系。
16、滚珠丝杆副中滚珠的循环方式有内循环和外循环两种17、在谐波齿轮传动中,若柔轮固定、谐波发生器主动、刚轮从动,则主、从动件转向_相同 ________ 。
18、传感器的迟滞特性是指输入量在增加和减少的过程中,同一输入量下其输出量的差别。
步进电机的计算与选型对于步进电动机的计算与选型,通常可以按照以下几个步骤:1) 根据机械系统结构,求得加在步进电动机转轴上的总转动惯量eq J ;2) 计算不同工况下加在步进电动机转轴上的等效负载转矩eq T ;3) 取其中最大的等效负载转矩,作为确定步进电动机最大静转矩的依据;4) 根据运行矩频特性、起动惯频特性等,对初选的步进电动机进行校核。
1. 步进电动机转轴上的总转动惯量eq J 的计算加在步进电动机转轴上的总转动惯量eq J 是进给伺服系统的主要参数之一,它对选择电动机具有重要意义。
eq J 主要包括电动机转子的转动惯量、减速装置与滚珠丝杠以及移动部件等折算到电动机转轴上的转动惯量等。
2. 步进电动机转轴上的等效负载转矩eq T 的计算步进电动机转轴所承受的负载转矩在不同的工况下是不同的。
通常考虑两种情况:一种情况是快速空载起动(工作负载为0),另一种情况是承受最大工作负载。
(1)快速空载起动时电动机转轴所承受的负载转矩eq1Teq1amax f 0T =T +T +T (4-8)式中 amax T ——快速空载起动时折算到电动机转轴上的最大加速转矩,单位为N ·m ;f T ——移动部件运动时折算到电动机转轴上的摩擦转矩,单位N ·m ;0T ——滚珠丝杠预紧后折算到电动机转轴上的附加摩擦转矩,单位为N ·m 。
具体计算过程如下:1)快速空载起动时折算到电动机转轴上的最大加速转矩:amax eq 2T =J =60eq ma J n t πε (4-9)式中 eq J ——步进电动机转轴上的总转动惯量,单位为2kg m ⋅;ε——电动机转轴的角加速度,单位为2/rad s ;m n ——电动机的转速,单位r/min ;a t ——电动机加速所用时间,单位为s ,一般在0.3~1s 之间选取。
2)移动部件运动时折算到电动机转轴上的摩擦转矩:f T =2F i πη摩h P (4-10)式中 F 摩——导轨的摩擦力,单位为N ;h P ——滚珠丝杠导程,单位为m ;η——传动链总效率,一般取0.70.85η=;i ——总的传动比,/s m i n n =,其中m n 为电动机转速,s n 为丝杠的转速。
由上看出,转化法的关键是确定等效转动惯量Jv和等效力矩Mv,也即是机械中各构件质量的转化和外力的转化。
比较式(10.2.1-2)和式(10.2.1-5)可知,为保证是“等效”的转化,必须遵守以下两个原则:动能相等原则转化件的等效转动惯量所具有的动能应与原机械的总动能相等。
功率相等原则转化件的等效力矩所作的元功(或瞬时功率)应与原机械上作用的全部外力所作的元功(或瞬时功率)相等。
由此可写出等效转动惯量Jv和等效力矩Mv的普遍公式。
按动能相等的原则,列出转化件与一般机械的动能等式由此得(10.2.2-1)(10.2.2-2)式中───—转化件的角速度;n ───机械中的活动构件数;i ───构件号;m i───第i构件的质量;v si───第i构件质心的速度。
───第i构件的移动动能;J si───第i构件绕质心的转动惯量;i───第i构件的角速度;───第i构件的转动动能;由式(10.2.2-2)看出,Jv总是为正。
按功率相等的原则,列出转化件与一般机械上作用外力的功率等式(10.2.2-3)由此得(10.2.2-4)式中Pi ───作用在第i构件上的力;vi ───第i构件上力Pi作用点的速度;ai ───力Pi方向与速度vi方向的夹角;Mi ───作用在第i构件上的力矩;wi ───第i构件的角速度。
思考题在式(10.2.2-4)中如何反应出作用在第i构件上力Pi或力矩Mi为驱动力还是工作阻力?夹角ai<90°,(Pivicosai)为正,说明Pi为驱动力。
反之,ai>90°,(Pivicosai)为负,则Pi为工作阻力。
若Mi方向与wi同向,则Mi为驱动力矩,Mi、wi乘积前取“+”号;反之,取“-”号。
同理,若按式(10.2.2-4)计算得Mv为正,则表示Mv与w方向一致,反之,说明方向相反。
有时也按功率相等的原则,分别将驱动力和工作阻力转化成等效驱动力矩MD和等效阻力矩MR。