GYS258短程纺牵伸机控制系统研究
- 格式:pdf
- 大小:3.09 MB
- 文档页数:3

《装备维修技术》2021年第8期—57—ZJ112卷烟机设备控制参数标准化研究常建宏(陕西中烟工业有限责任公司宝鸡卷烟厂)前言 ZJ112是从德国HAUNI 公司引进PROTOS 90E 专有技术生产的新一代高速卷接机组,其设计生产速度为10000 支/分。
这条生产线由VE 100E 喂丝机、SE 90E 烟条成形机和MAX 90E 滤嘴接装机组成。
先进的控制技术需要大量的控制参数来保证运行的平稳,协调,可靠,对控制参数的标准化研究意义重大,是我们提高设备运行效率,提高产品质量的重要保证。
1、ZJ112卷烟机参数数据结构:ZJ112整个机器的参数数据通过MLP 可视化PC 系统来完成。
它协调经由 CAN 总线传输的全部数据通讯。
它是系统内所有CAN 总线用户的高级显示和控制装置。
它汇集处理用户信息数据,并从这种数据中计算出基本数据。
在整个参数可以分为牌号参数和机器参数两类,ZJ112卷烟机整个参数集存储在M L P 的硬盘中对应的文件夹\f u n c X X 存储牌号参数的文件B 0 0 0 X X 0 0 .I N I 和存储机器参数的文件P a r a X X 0 0 .I N I 中。
按照整个系统分类将设备参数分为机器参数和品牌参数两类:每一类参数都包括了上面8个方面的内容:设备控制参数共139个,其中品牌参数49个,机器参数90个。
在这些参数中,有一部分参数的值是固定的,绝对不能修改,一旦数值改变将会造成设备无法正常运行。
这类参数我们不作为本次研究的重点内容,只是将参数统计出来作为记录,为设备维修提供依据。
本次课题我们研究的参数主要集中在对烟支重量有较大影响的设备控制参数。
2、重量控制相关参数研究2.1、ZJ112烟条成型和烟支重量控制原理。
针辊将烟支所需的烟丝由计量料槽中带出经过两次分选后进入流化床,在流化床中,烟丝由空气喷嘴输送到风室装置。
风室装置通过负压气流将烟丝吸附在吸丝带上。
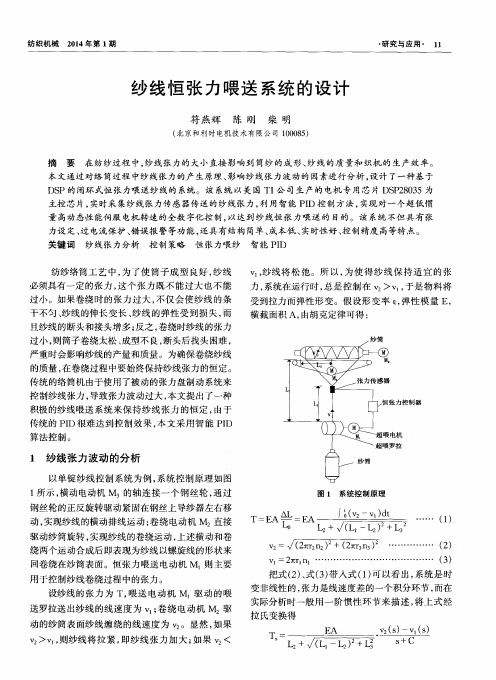


名词解释握持力:罗拉钳口对须条的摩擦力。
牵伸力:牵伸区内前钳口握持的快速纤维从慢速纤维中抽引出来时所需克服摩擦阻力的总和称牵伸力。
控制力:以后罗拉速度运动的慢速纤维作用于牵伸区内某一根浮游纤维整个长度上的力称控制力。
引导力:以前罗拉速度运动的快速纤维作用于牵伸区内某一根浮游纤维整个长度上的力称为引导力。
摩擦力界:在牵伸区内,纤维与纤维之间,纤维与牵伸装部件之间的摩擦力所作用的空间称为摩擦力界。
管导:粗纱机采用锭翼加捻,依靠筒管与锭翼之间的转速差异而实现卷绕。
筒管的转速大于锭翼转速时称管导。
翼导:粗纱机采用锭翼加捻,依靠筒管与锭翼之间的转速差异而实现卷绕。
锭翼的转速大于筒管转速时称翼导。
捻回重分布现象:当张力和截面粗细改变时,捻回重新发生转移,称为捻回重分布现象。
粗纱伸长率:以同一时间内,筒管上卷绕的实测长度与前罗拉输出,计算长度之差对前罗拉输出的计算长度之比。
L1——前罗拉输出的计算长度。
L2——同一时间内筒管上卷绕的实际长度.胶辊滑溜率:胶辊与下罗拉表面速度产生的差异,用滑溜率ξ(%)表示:Vb ——罗拉线速,Vt ——胶辊线速粗纱张力:一般筒管的卷绕速度略大于前罗拉的输出速度,这样能保证粗纱有一定的张力,而使粗纱成形良好,这个张力称粗纱张力。
捻度:纱条相邻截面间相对回转一周称为一个捻回,单位长度纱条上的捻回数称为捻度。
当线密度(细度)用Tex 时,捻度单位为:捻回数/10cm 。
用Tt 表示。
假捻:当纱条两端被握持,中间加捻时,纱条的两端所加捻回相等而方向相反,当加捻的外力除去后,纱条上的捻回即相互抵消。
这种暂时存在的捻回称为假捻。
捻幅:单位长度纱线加捻时,截面上任意一点在该截面上相对转动的幅长。
简答题 ☆1、并合工序的任务 答:并合:改善条子的长,中片段均匀度,使熟条的重量不匀率降到1%以下。
牵伸:提高纤维的伸直度和分离度。
混和:保证条子的混棉成分。
尤其是混纺纱线,通过并合的方法,使纤维充分混和,避免了染色的“色差”。
20XX年复习资料大学复习资料专业:班级:科目老师:日期:实验A 纺纱11 写出清梳联的任务。
答:开松,除杂,混合,梳理,成条。
(清:开松、除杂、混合;梳:梳理、成条。
)2 写出清梳联合机台的名称及工艺过程。
答:AS20XXXX4喂棉机→AFC20XXXX2双轴流开棉机→MCM六仓混棉机→CNT3三罗拉清棉机→DX385除微尘机→DK820XXXX梳棉机。
3 简述三滚筒开棉机各滚筒的针布型式,三个滚筒速度是如何变化的。
答:第一打手(粗针罗拉),第二打手(锯齿),第三打手(细锯齿)。
第二打手是第一打手的1.7倍,第三打手是第二打手的1.7倍。
4 画出盖板梳棉机工艺简图,标出各机件名称,标出针齿方向,运动方向,相互作用。
答:图2-3-1。
锡林——刺辊:剥取作用锡林——盖板:分梳作用锡林——道夫:分梳作用5 画出罗拉梳理机工艺简图,标出各机件名称,说出锡林,工作辊及剥取辊间的作用,标出针齿方向,运动方向,作用性质。
答:图2-4-1A-锡林 B-工作辊 C-剥取辊 D-道夫锡林——工作辊:分梳作用锡林——剥取辊:剥取作用ABCD剥取辊——工作辊:剥取作用实验B 纺纱2精梳1 精梳机的作用是什么?去短留长:去除不符合精梳制品要求的短纤维;平行顺直:提高纤维的平行伸直度;去除杂质:去除棉结和细小杂质2 精梳机是如何完成对纤维的梳理的?圆梳梳理须丛的前端,在拔出过程中,顶梳梳理须丛的后端3 拔取隔距的定义。
答:拔取车摆动到最后端时,拔取罗拉到下钳板的距离。
4 梳下的短纤维及杂质落到哪?答:落入短毛箱。
5 精梳机喂入与输出的特点?答:间歇式地喂入和输出。
针梳机、自调匀整装置1 画出针梳机工艺简图,标出各机件名称。
答:图2-7-1。
2 针板的作用是什么?针板是如何传动运动的?答:梳理纤维,带动纤维向前传递。
当针板被工作螺杆推到最前端时,受到三叶凸轮的打击,针板落入规程螺杆的螺旋导槽。
3 针梳机前隔距指哪?牵伸区是单牵伸还是双牵伸?答:针板与前小罗拉之间的距离。
2021年10月甘 肃 农 业 大 学 学 报第56卷第5期159~168JOURNALOFGANSUAGRICULTURALUNIVERSITY双月刊犇犗犐:10.13432/j.cnki.jgsau.2021.05.021基于自动对行的四垄八行花生条铺收获机设计与试验马宁,王东伟,尚书旗,何晓宁,胥南,郭鹏,赵泽龙,赵壮(青岛农业大学机电工程学院,山东青岛 266109)摘要:【目的】针对目前我国花生条铺收获机对不同种植模式和作业环境适应性差、收获效率低、收获效果欠佳等问题,设计了一种四垄八行花生条铺收获机.【方法】对收获机的整体结构、关键部位的设计思路及工作原理进行了分析.该收获机关键装置包括:挖掘装置、夹持输送装置、自动对行装置、机架折叠装置等,并对影响收获性能指标的主要因素进行试验分析与参数优化.【结果】该收获机能够一次性完成四垄八行花生收获作业,当前进方向发生偏离时可实现自动对行,具有机架折叠功能.优化得到最优参数组合,当机具前进速度1.36m/s,夹持链轮转速300r/min,挖掘深度146mm时,埋果率1.06%,带土率10.31%,作业效率1.39hm2/h.【结论】田间试验表明,该机具作业性能良好,各项性能指标均优于相关设计要求和技术标准.关键词:花生;条铺收获机;四垄八行;自动对行;折叠中图分类号:S225文献标志码:A开放科学(资源服务)标识码(犗犛犐犇):文章编号:1003 4315(2021)05 0159 10第一作者:马宁,硕士研究生.E mail:957431735@qq.com通信作者:王东伟,教授,博士,主要从事根茎类作物智能农机装备研究.E mail:w88030661@163.com基金项目:国家重点研发计划项目(2016YFD0702103);山东省重大科技创新工程项目(2018CXC0219);山东省农机装备研发创新计划项目(2018YF008).收稿日期:2021 01 27;修回日期:2021 03 30犇犲狊犻犵狀犪狀犱狋犲狊狋犻狀犵狅犳狆犲犪狀狌狋狊狋狉犻狆 犾犪狔犻狀犵犺犪狉狏犲狊狋犲狉狅犳犳狅狌狉狉犻犱犵犲狊犪狀犱犲犻犵犺狋狉狅狑狊犫犪狊犲犱狅狀犪狌狋狅犿犪狋犻犮犪犾犻犵狀犿犲狀狋MANing,WANGDongwei,SHANGShuqi,HEXiaoning,XUNan,GUOPeng,ZHAOZelong,ZHAOZhuang(CollegeofMechanicalandElectricalEngineering,QingdaoAgriculturalUniversity,Qingdao266109,China)犃犫狊狋狉犪犮狋:【Objective】Duetotheproblemsofcurrently usedpeanutharvestersinChina,suchasthepooradaptabilitytodifferentplantingpatternsandworkingenvironment,thelowharvestefficiency,andthepoorharvestperformance,apeanutstrip layingharvestingmachineoffourridgesandeightrowswasdesigned.【Method】Theoveralldesignschemewasdescribed,andthekeydevicesincludedexcavationde vice,clampingandconveyingdevice,automaticalignmentdevice,rackfoldingdevice,etc.Themainfactorsaffectingharvestperformancewerealsoanalyzedandoptimizedinthisstudy.【Result】Theharvestercouldfinishpeanutharvestforfour ridgeandeight rowstripatonetime.Furthermore,theharvesterhadframe foldingandautomatic alignmentfunctionswhentheforwarddirectiondeviates.Theoptimalparametercombinationwasasfollows:theforwardvelocityof1.36m/s,theclampingsprocketspeedof300r/min,甘肃农业大学学报2021年andtheexcavationdepthof146mm.Withsuchparametercombination,theharvesterhadarateofpeanutburiedinsoilof1.06%,acontaining soilrateof10.31%,anoperationalefficiencyof1.39hm2/h.【Conclusion】Fieldtestsshowedthatthemachineworkedwellandhadhighertechnical performanceindexthantherelevantrequirementstechnicalstandards.犓犲狔狑狅狉犱狊:peanut;striplayharvester;fourridgesandeightrows;automaticalignment;fold 花生作为世界范围内广泛种植的经济作物和油料作物,是国家重点扶持发展且极具竞争力的出口创汇农产品[1].近年来花生种植面积稳步增长,主要集中在河南、山东、河北以及安徽等地区[2].根据国家统计局数据显示,2019年我国花生种植面积达463.348万hm2,花生总产量达1751.96万t[3],均居世界前列.然而,目前我国花生收获机械化水平发展缓慢,仅为44.76%[4 5],部分花生主产区仍以简单的小型挖掘收获机辅助人工收获为主,严重制约了花生生产机械化水平的提升.欧美等发达国家对花生收获机械的研究起步较早,尤其是美国在两段式收获方面的技术和装备一直处于世界领先地位.目前主要有KMC、AMA DAS、FERGUSON、COLOMBO、PEARMAN等公司生产的2~8行铲链式和铲夹式花生起收机,机械化程度高,性能可靠[6].但美国花生主要以蔓生型为主,与我国直立型花生收获存在较大差异,因此美国收获机不适用于我国花生收获实际需要.近年来,为推进我国花生收获机械化发展进程,相关领域的专家学者和科研单位陆续开展了系列研究.目前应用于我国花生两段式收获方式的机型主要包括4H 1500型花生挖掘收获机、4H 800型花生挖掘收获机[7]、4HCDS 100型挖掘收获机[8]、振动式铺放型花生挖掘收获机[9]等,通过挖掘铲与振动筛或升运链相结合的方式,对花生进行挖掘、输送、去土、铺放,在一定程度上实现了花生收获的机械化作业,代替人工收获,降低了劳动强度.虽然多种类型的花生起收机得到了相应的推广应用,但大多为小型机械[10],收获效率低,对各花生主产区的垄距、垄宽、行距等不同种植模式和作业环境适应性差,收获效果欠佳.我国对宽幅高效、性能可靠、具有自动对行功能的多垄多行花生条铺收获装备的研究匮乏.围绕我国花生种植模式,结合农机农艺相融合的要求,设计四垄八行花生条铺收获机,当机具前进方向与花生垄发生偏离时能够实现自动对行,具有机架折叠功能,以期一次性完成四垄八行花生挖掘拔取、夹持输送、梳刷去土、有序条铺收获作业,以期提高花生收获效率,降低埋果率和带土率,为多垄多行花生条铺收获装备的研究提供参考.1 整体方案设计1.1 结构组成四垄八行花生条铺收获机主要由挖掘装置、夹持输送装置、去土装置、有序条铺装置及折叠装置、自动对行装置等组成,其结构设计如图1所示.1.2 工作原理整机配套70kW拖拉机,采用后悬挂的方式进 1:悬挂架;2.变速箱;3:机架;4:折叠装置;5:传动装置;6:液压缸;7:挖掘装置;8:位移传感器;9:夹持链;10:夹持输送架:11:有序条铺装置;12:去土装置;13:仿形轮;14:控制装置;15:超声波传感器;16:限深装置.1:Headstock;2:Gearbox;3:Frame;4:Foldingdevice;5:Gear ing;6:Hydrauliccylinder;7:Excavationdevice;8:Displacementtransducer;9:Clampingchain;10:Frameofclampingandconve ying;11:Orderedstriplayingdevice;12:Removing soildevice;13:Profilingwheel;14:Controldevice;15:Ultrasonicsensor;16:Depthlimitingdevice.图1 四垄八行花生条铺收获机结构Figure1 Thestructureofpeanutharvestingmachineoffourridgesandeightrows061第5期马宁等:基于自动对行的四垄八行花生条铺收获机设计与试验行作业.拖拉机后动力输出轴与收获机变速箱连接,动力由传动装置进行传递,通过万向节带动齿轮组工作;动力由齿轮组传递到链轮进而带动夹持链运转.田间作业开始前,控制装置调节液压缸活塞杆,通过折叠装置使两侧机架向下翻转展开.作业过程中,若前进方向发生偏离,通过自动对行装置偏离探测机构感知反馈,控制装置调节夹持输送架横向移动,使夹持输送架前端的挖掘铲与花生垄对齐,实现自动对行.挖掘铲将花生植株从土壤中挖出,夹持链同时进行夹持拔取,使其进入夹持输送装置并输送至机具尾部;在输送过程中去土杆以梳刷方式将粘附在根系及荚果上的土壤去除;花生植株在条铺引导板的作用下以条状按同一方向整齐有序铺放于田间.2 关键部件的设计与分析2.1 挖掘装置挖掘铲作为挖掘装置的重要组成部分,应具有良好的入土性能[11],能够松碎土壤,将花生植株完全挖出,不损伤花生荚果;还需对作物施加一个向上托起的力,使其能够顺利进入夹持输送环节[12].在四垄八行花生挖掘作业过程中,挖掘铲两侧翻起的土壤易造成壅土堵塞;对行调节过程中,挖掘铲在土下随夹持输送架左右横向移动,受到土壤阻力较大且易缠绕杂草.针对上述问题,设计对置式平面双铲,采用前后交错排列的方式,能有效避免壅土堵塞与缠绕杂草,减小挖掘阻力.挖掘装置结构如图2所示.1:连接杆;2:铲柄;3:挖掘铲.1:Connectingrod;2:Shovelshaft;3.Diggingshovel.图2 挖掘装置结构图Figure2 Thestructureofexcavationdevice 挖掘铲的入土角和铲刃顶角是影响挖掘铲阻力大小及挖掘效果的主要因素.挖掘铲在工作过程中土壤和铲面受力分析如图3~4所示. 1:土壤;2:铲面;1:Soil;2:Shovelsurface.图3 土壤受力分析Figure3 Forceanalysisofsoil图4 铲面受力分析Figure4 Forceanalysisofshovelsurface 由土壤和铲面受力分析可知,挖掘铲在作业过程中受力情况满足:犉=犌犣+犆狊1+犅犣(sinβ+μ2cosβ)+犆犪犃1犣(sinθ+μ1cosθ)(1)式中:犉为挖掘铲在工作中受到的牵引力(N);犌为铲面上方土壤所受的重力(N);犣为常数;犆为土壤内凝聚力因数(N/m2);狊1为土壤剪切面积(m2);犅为土壤沿挖掘铲面运动的加速力(N);β为前失效倾角(°);θ为挖掘铲的入土角(°);μ1为土壤与挖掘铲之间的摩擦因数;μ2为土壤与土壤之间的摩擦因数;犆犪为土壤的附着力因数(N/m2);犃1为铲面面积(m2).图3~4中:犳1=μ1犖1(2)犳2=μ2犖2(3)式中:犖1为挖掘铲的法向载荷(N);犖2为前失效面的法向载荷(N);犞犿为机具前进速度(m/s).根据铲面受力情况,为使挖掘铲铲起的土壤向后运动,建立关于入土角的受力平衡方程:犉cosθ-犜-犌sinθ=0(4)犚-犌cosθ-犉sinθ=0(5)161甘肃农业大学学报2021年犜=犚μ1(6)式中:犉为挖掘铲在工作中受到的牵引力(N);犚为土壤对铲的作用力(N);犜为铲面所受的摩擦力(N);犌为铲面上方土壤所受的重力(N);θ为挖掘铲的入土角(°);μ1=tanφ,φ为铲面与接触物的摩擦角(°).化简可得犉≥犌tan(θ+φ)(7)由以上关系可知:铲面受到的力与入土角的大小呈正相关关系;挖掘铲受到的牵引阻力与入土角的关系为:当0°<θ<15°时牵引阻力随入土角的增大逐渐上升;当15°<θ<25°时牵引阻力随入土角的增大上升缓慢;当θ<25°时牵引阻力随入土角的增大急剧上升.因此,挖掘铲的入土角应取15°~25°为宜,取入土角为20°.挖掘铲切割性能主要取决于铲刃顶角[13].铲刃顶角过大时,铲刃易被根系缠结造成堵塞;铲刃顶角过小时,铲刃不易切断根蔓而发生滑脱,铲刃的滑切受力分析如图5所示.图5 铲刃滑切受力分析Figure5 Forceanalysisofedgeofshovelslidingcutting为保证挖掘铲具有良好滑切性能,使土壤及花生根系顺利经过铲面,铲刃顶角的设计应满足:犕=犘cosγ(8)犈=犘sinγ(9)犖=犈tanφ(10)产生滑切的条件是:犕>犖,即犘cosγ>犘sinγtanφ(11)经化简得:γ<90°-φ(12)式中:γ为铲刃顶角(°);犘为挖掘铲所受阻力(N);犕为挖掘铲所受阻力的分力(N);犖为滑移摩擦力(N);犈为铲刃对接触物的作用力(N).在适宜的角度区间内变化时,γ越小,滑切性能越好,但γ减小会增加挖掘铲长度,使整机的纵向尺寸增大,不利于整机的提升和行走[13],因此γ不宜过小.土壤与钢的摩擦系数tanφ一般为0.4~0.8,γ取48°左右为宜.2.2 夹持输送装置夹持输送是花生收获作业过程中的重要环节.夹持输送装置主要由夹持链轮、夹持链、张紧链轮、张紧杆、夹持输送架组成.挖掘出土的花生植株经夹持链夹持拔起后被输送至机具尾部,夹持输送装置结构如图6所示. 1:夹持链轮;2:夹持链;3:张紧链轮;4:张紧杆;5:夹持输送架.1:Clampingsprocket;2:Clampingchain;3:Tightenersprock et;4:Nuttedrod;5:Frameofclampingandconveying.图6 夹持输送装置结构Figure6 Thestructureoftheclampingconveyingdevice 夹持输送速度是保证装置正常运行的关键参数.收获机采用挖拔夹持组合方式,要求花生挖掘、夹持拔取几乎同步进行;若夹持输送速度过低,将导致花生植株在被夹持前出现倒伏,不利于后续夹持输送;若夹持输送速度过快,将造成先拔后挖,导致秧蔓断裂,埋果率、带土率升高,影响收获效果[14].因此,夹持输送速度与机具前进速度在水平矢量上应相等,才能保证夹持输送顺利进行.夹持输送速度和机具前进速度示意如图7所示.图7 夹持输送装置速度示意图Figure7 Speedoftheclampingconveyingdevice261第5期马宁等:基于自动对行的四垄八行花生条铺收获机设计与试验犞犼cosα=犞犿(13)犞犼=犞犿cosα(14)式中:犞犿为机具前进速度(m/s);犞犼为夹持链输送速度(m/s);α为夹持链与机器前进方向速度的夹角(°);对夹持输送速度进行分解,如图8所示.图8 夹持输送速度分解图Figure8 Velocitydecompositiondiagramoftheclampingconveying由速度分解图可知:犞→ 犻=犞→ 犿+犞→ 犼(15)犞犻=犞犿2+犞犼2+2犞犿犞犼cos槡α(16)犪犫=犞犼sin(ω-α)=犞犿sinω(17) 则:犞犼犞犿=sinωsin(ω-α)=犓(18)当犓<1即犞犼<犞犿,角ω>π-时,绝对速度犞犻和花生植株角度会产生相对倾斜,不利于夹持输送装置的正常运行;当犓>1即犞犼>犞犿,角ω<π—时,绝对速度犞犻的方向与夹持链运动方向一致并与水平方向形成夹角.根据田间经验并结合机器前进速度、变速箱传动关系,通过查阅相关资料确定夹角为10°~20°,当α=20°,犓=1.47~1.89可达到最佳工作状态.2.3 折叠装置折叠装置主要分为4组,每组由两个圆头条形连杆,4个圆角弧边固定座组成.两个连杆的一端与液压缸缸头的耳环相连,当液压缸活塞杆回缩时,拉动连杆,从而带动两侧机架翻起完成折叠.折叠装置结构如图9所示.作为大型宽幅机具,折叠装置能够使其完成翻转折叠,在未工作状态下减小整机所占空间,有效解决宽幅机具运输和田间转弯不便的难题.2.4 自动对行装置我国各花生主产区种植模式和农艺要求存在差1:机架横梁;2:固定座;3:液压缸;4:活塞杆;5:液压缸耳环;6:圆头条形连杆;7:圆角弧边固定座.1:Framebeam;2:Fixedstructure;3:Hydrauliccylinder;4;Pis tonrod;5.Hydrauliccylinderring;6.Connectingrodofroundheadstrip;7.Fixedstructure;ofcircularedge.图9 折叠装置结构图Figure9 Thestructureoffoldingdevice异,垄距、垄宽、行距不一致导致机具在收获过程中前进方向与花生垄发生偏离,挖掘铲出现漏挖、少挖、伤果现象.驾驶员为使机具对行作业,致使劳动强度和难度加大,且对行作业的准确性易受人为因素影响,降低收获效率,增加收获损失[15].针对上述问题,综合采用机 电 液一体化控制技术,设计了一种自动对行装置,包括偏离探测机构、夹持输送架横向移动机构、液压控制系统.偏离探测机构通过感知垄沟位置偏移的方式,对机具在收获作业过程中是否准确对行进行实时探测,适用于花生、马铃薯等生长于地下的作物自动对行收获.偏离探测机构如图10所示.1:机架;2:夹持输送架;3:超声波传感器;4:滑块;5:滑轨;6:滑动套筒;7:仿形轮连接杆;8:仿形轮.1:Frame;2:Frameofclampingandconveying;3:Ultrasonicsensor;4:Slidingblock;5:Sliderail;6:Slidingsleeve;7:Profilingwheelconnectingrod;8:Profilingwheel.图10 偏离探测机构示意图Figure10 Diagramofdeviationdetectionmechanism361甘肃农业大学学报2021年机具在田间作业时,仿形轮沿垄沟行走,若仿形轮偏离垄沟,则连接杆在滑动套筒内相应向上滑动,安装在滑动套筒顶端的超声波传感器探测到仿形轮连接杆顶端与其距离变小,说明此时前进方向发生偏离.根据时间差测距法,通过超声波传感器发射声波的传导速度与返回时间测算出距离,公式如下:狊=狋狏(19)式中:狊为超声波通过的距离(mm);狋为超声波返回所用时间(min);狏为超声波移动速度(m/s).通过使谐振频率与谐振阻抗保持一致,确保探测时间差的准确性,公式如下:犳犿=12π犔1犆槡1(20)犳狀=12π犔1(犆0犆1犆0+犆1槡)(21)式中:犳犿为谐振频率(Hz);犳狀为阻抗频率(Hz);犔1为等效电感(H);犆0为静态电容(F);犆1为等效电容(F).当无机械损耗时:犳犿=犳狀.当有机械损耗时:犳犿<犳狀.为保证机具自动对行顺利完成,设计夹持输送架横向移动机构.夹持输送架通过两组滑动套筒、圆柱滑轨设置于机架下方,与机架相连,可在液压缸作用下实现左右横向移动,完成自动对行.机架横向移动机构如图11所示.1:机架;2:滑动套筒;3:圆柱滑轨;4:位移传感器;5:液压缸;6:活塞杆;7:夹持输送架.1:Frame;2:Slidingsleeve;3:Cylindricalsliderail;4:Displace menttransducer;5:Hydrauliccylinder;6:Pistonrod;7:Frameofclampingandconveying.图11 机架横向移动机构示意图Figure11 Diagramofframelateralmovingmechanism自动对行液压控制系统主要包括油箱、单向定量液压泵、电磁换向阀、流量阀、液压缸、位移传感器.自动对行装置工作时,控制器将偏离探测机构发出的信号,由比例放大器进行功率放大后传递给电磁换向阀,电磁阀按比例移动阀芯的位置,即可控制液流的流量并改变其方向,进而控制液压缸活塞杆的伸缩,使夹持输送架在横向移动机构的作用下左右移动,完成自动对行.液压控制系统原理如图12所示. 1:油箱;2:液压泵;3:电磁换向阀;4:流量阀;5:位移传感器;6:液压缸.1:Fueltank;2:Hydraulicpump;3:Mageneticexchangevalve;4:Flowvalve;5:Displacementtransducer;6:Hydrauliccylinder.图12 液压控制系统原理图Figure12 Schematicdiagramofhydrauliccontrolsystem自动对行和两侧机架折叠均依靠液压缸完成,对液压缸主要规格尺寸进行设计.本设计采用工程常用的近似计算方法,即按最大负载力犉Lmax确定液压缸的规格尺寸[16].负载力由摩擦力犉f、惯性力犉a和外作用负载犉e组成,无弹性负载,需满足:犉犔max=犉犳+犉犪+犉犲(22)犉犳=犳犕狋犵(23)犉犪=犕狋犪max(24)犪max=犞狀2π犳-3犱犫(25)式中:犕狋为运动部件总质量(kg);犵为重力加速度,取犵=9.8m/s2;犪max为最大纠偏加速度(m/s2);犞狀为纠偏速度,取犞狀=8.3×10-2m/s;犳-3犱犫为常数,犳-3犱犫=3;犳为摩擦因数,取犳=0.08.461第5期马宁等:基于自动对行的四垄八行花生条铺收获机设计与试验按负载最佳匹配原则,取负载压力狆 =2 狆狊.所以,液压缸有效面积犃狆为(取犱/犇=0.5).犃狆=犉犔犘犔=3犉犔2犘狊(26)犃狆=π4(犇2-犱2)(27)式中:犇为液压缸活塞直径(m);犱为活塞杆直径(m).经计算,得:犱=4犃狆3槡π=0.0279(28)按GB/T2348 1993《液压缸缸内径和活塞杆直径系列》圆整为犱=0.028,犿=28mm,犇=55mm.结合横向移动机构及折叠装置设计尺寸和安装位置,液压缸主要结构参数见表1.表1 液压缸结构参数Table1 Structureparametersofhydrauliccylindermm名称Title活塞杆直径Pistonroddia缸内径Cylinderinnerdia缸外径Outerdiaofcylinder行程Stroke对行油缸Contra linecylinder285560400折叠油缸Foldingcylinder2345601703 田间性能试验3.1 试验条件选取山东省青岛市平度市店子镇花生试验田进行样机田间试验,如图13所示.花生品种为鲁花11号,株型紧凑、结构整齐,种植土壤为壤土,种植模式为单垄双行,垄距800~850mm,垄宽550~600mm,行距250~300mm,株高300~380mm,株距80~100mm.3.2 试验方案设计试验选取5个收获试验区进行重复试验,每组试验选择4垄、长为20m的区域,试验结果取平均值[17].选择机具前进速度、夹持链轮转速、挖掘深度作为试验因素,选取埋果率、带土率作为试验指标,参照《NY/T2204 2012花生收获机械质量评价技图13 样机田间试验Figure13 Fieldexperimentofprototype术规范》,各试验指标定义如下:埋果率:收集试验区内埋在土层下的荚果称其质量;收集掉落在土层表面的荚果称其质量;将花生植株上的花生荚果摘下称其质量.按式(29)计算埋果率,并求出5次重复试验的平均值.犛犕(%)=犠犕犠犙×100%(29)式中:犛犕为埋果率,(%);犠犕为埋在土层中的荚果质量,(g);犠犙为收获区试验区荚果总质量,(g);带土率:收集试验区内的花生植株(尽量保证粘附的土壤与其他杂质不掉落),称其总质量;将粘附在花生植株上的土壤进行清理收集,称其质量;按式(30)计算带土率,并求出5次重复试验的平均值.犛犜(%)=犠犜犠犙犣×100%(30)式中:犛犕为带土率,(%);犠犜为花生植株带土质量,(g);犠犙犣为花生植株清理土壤前总质量,(g).采用三因素三水平二次旋转正交组合设计试验,试验因素与水平编码如表2所示[18].3.3 试验结果分析根据Box Behnken中心组合设计三因素三水平试验,试验方案与结果如表3所示[19].根据表3中的试验结果,通过Design Expert10.0.4软件进行多元回归拟合分析,建立二次多项式响应面回归模型,并对回归模型进行显著性检验与方差分析,如表4所示.561甘肃农业大学学报2021年表2 试验因素与水平Table2 Experimentalfactorsandlevels水平Levels犡1机具前进速度/(m·s-1)Advancingvelocity犡2夹持链轮转速/(r·min-1)Speedofclampingsprocket犡3挖掘深度Excavationdepth/mm-11.2721013801.4428014611.61350154 犢1=1.19+0.20犡1+0.31犡2+0.16犡3-0.14犡1犡2+0.13犡1犡3+0.095犡2犡3+0.57犡12+0.32犡22+0.91犡32(31) 犢2=10.49+0.28犡1+0.20犡2+0.35犡3-0.21犡1犡2+0.26犡1犡3-0.25犡2犡3+犡12+1.45犡22+1.13犡32(32)其中犡1为机具前进速度;犡2为夹持链轮转速;犡3为挖掘深度;犢1为埋果率;犢2为带土率.由表4分析可知,埋果率犢1和带土率犢2响应面回归模型的犘值均小于0.0001,表明两回归模型极显著(犘<0.01);失拟项犘值均大于0.05,表明失拟项不显著,模型拟合度高;决定系数犚2的值分别为0.9932、0.9902,均大于99%,表明两个回归模型能够解释99%的响应值变化.因此,两模型可以用来优化收获机相关参数.各试验因素犘值的大小可以反映其对指标的影响程度.在埋果率回归模型中,犡1、犡2、犡3、犡12、犡22、犡32(犘<0.01)6个回归项对模型影响极显著,犡1犡2、犡1犡3、犡2犡3(犘<0.05)对模型影响显著;带土率回归模型中,犡1、犡3、犡22、犡32(犘<0.01)对模型影响极显著;犡2、犡1犡2、犡1犡3、犡2犡3、犡12(犘<0.05)对模型影响显著.根据响应面回归模型分析结果,应用Design Expert10.0.4软件绘制响应曲面图;机具前进速度、夹持链轮转速、挖掘深度对埋果率、带土率的响应面分析如图14~15所示.表3 试验方案与试验结果Table3 Experimentalprojectandresults序号No.犡1机具前进速度/(m·s-1)Advancingvelocity犡2夹持链轮转速/(r·min-1)Speedofclampingsprocket犡3挖掘深度/mmExcavationdepth犢1埋果率/%Intergroundpeanutrate犢2带土率/%Soilcarryingrate1-1-101.4111.5921-102.1612.463-1102.2712.3841102.4812.415-10-12.3611.55610-12.4211.697-1012.4611.5881013.0412.7490-1-11.9412.191001-12.4113.11110-112.0313.54120112.8813.47130001.1910.66140001.2410.53150001.0510.31160001.2510.63170001.2110.32661第5期马宁等:基于自动对行的四垄八行花生条铺收获机设计与试验表4 回归方程方差分析Table4 RegressionequationofVarianceanalysis来源Source埋果率/%Intergroundpeanutrate平方和Sumofsquares自由度Degreeoffreedom犉值犉value显著水平SignificantlevelP带土率/%Soilcarringrate平方和Sumofsquares自由度Degreeoffreedom犉值犉value显著水平SignificantlevelP模型Model6.509113.52<0.000118.37978.28<0.0001犡10.32150.300.00020.61123.200.0019犡20.781122.81<0.00010.32112.120.0102犡30.20132.190.00080.97137.320.0005犡1犡20.073111.460.01170.1816.770.0354犡1犡30.068110.630.01390.2619.980.0160犡2犡30.03615.670.04870.2519.400.0182犡121.381217.70<0.00010.30111.450.0117犡220.43167.14<0.00018.901341.26<0.0001犡322.751432.66<0.00015.411207.56<0.0001残差Residual0.04570.187失拟项Lackoffit0.01830.940.49900.07130.850.5341误差Pureerror0.0264犚20.99320.114犚20.9902总和Total6.5416Adj犚20.984418.5516Adj犚20.9775 犘<0.01(极显著),犘<0.05(显著).图14 因素间交互作用对埋果率的影响Figure14 Interactionsbetweenfactorsontheintergroundpeanutrate图15 因素间交互作用对带土率的影响Figure15 Interactionsbetweenfactorsonthesoilrate761甘肃农业大学学报2021年 由图14 A~C可以看出:埋果率随机具前进速度增大呈先缓慢增长后快速增长的趋势,这是由于机具前进速度变化越大,挖掘装置和夹持输送装置的工作效果差距越大.机具前进速度过快时,挖掘铲对花生植株的挖掘不充分,夹持输送链无法对花生植株完成正常的夹持拔取,出现落果、埋果现象,导致埋果率持续上升;随挖掘深度的增大埋果率先快速下降后缓慢增长,这是由于当挖掘深度逐渐增大时,挖掘铲能够将花生植株充分挖掘出土,但挖掘深度过大时,挖掘铲的阻力较大,挖掘效果变差,导致埋果率缓慢增长.埋果率随夹持链轮转速的增大变化趋势相对平缓.由图15 A~C可以看出:带土率随机具前进速度的增大变化趋势相对平缓;随夹持链轮转速增大,呈下降趋势;随挖掘深度的增大呈增长趋势,这是由于当夹持链轮转速较大时,被夹持输送链夹持拔起的花生植株运动速度较快,粘附的土壤会相应掉落,导致带土率下降;当挖掘深度增大时,由挖掘铲挖掘出土的花生植株根系粘附的土壤较多,导致带土率上升.利用Design Expert10.0.4软件对2个指标的回归模型进行最优化求解[20].最优参数组合为:机具前进速度为1.36m/s,夹持链轮为300r/min,挖掘深度为146mm.四垄八行花生有序条铺收获机田间试验结果见表5.由表5试验结果可以看出,机具各项技术性能指标均满足《NY/T2204 2012花生收获机械质量评价技术规范》,符合相关设计要求.表5 田间试验结果Table5 Resultsoffieldexperiment项目Item埋果率/%Intergroundpeanutrate带土率/%Soilcarringrate作业效率/(hm2·h-1)Workefficiency技术要求Teahnicalrequirement≤2.0≤20≥0.3检测结果Detectionresult1.0610.311.394 结论1) 设计的四垄八行花生有序条铺收获机能够一次性完成四垄八行花生的挖掘拔取、夹持输送、梳刷去土、整齐铺放工作,可实现自动对行、机架折叠等功能,对花生垄距、垄宽、行距等不同种植模式和作业环境适应性强,收获效果好,收获效率高.2) 设计的自动对行装置通过偏离探测机构对前进方向是否偏离花生垄进行探测;横向移动机构能实现夹持输送架左右横向移动,完成自动对行,最大程度避免漏挖、少挖伤果现象,降低了收获损失,保证了收获效果;折叠装置能使两侧机架完成翻转折叠,减小整机所占空间,有效解决大型宽幅机具运输及田间转弯不便的难题.3) 优化后的最优参数组合为机器具进速度1.36m/s,夹持输送速度300r/min,挖掘深度146mm,此时埋果率1.06%,带土率10.31%,作业效率1.39hm2/h.各项参数均符合设计要求和相关技术标准,满足实际生产要求.参考文献[1] 郭伟宏,郭辉,于欣东,等.基于两段式收获工艺的花生起收机设计与试验[J].中国农机化学报,2020,41(7):34 39.[2] 王东伟,尚书旗,李想,等.花生联合收获机L型输送清选分离机构研究[J].农业机械学报,2013,44(S2):6874,51.[3] 中华人民共和国统计局.中国统计年鉴[M].北京:中国统计出版社,2019.[4] 高连兴,陈中玉,CharlesChen,等.美国花生收获机械化技术衍变历程及对中国的启示[J].农业工程学报,2017,33(12):1 9.[5] 王冰,胡志超,彭宝良,等.半喂入四行花生联合收获机弹指筛结构运行参数优化[J].农业工程学报,2017,33(21):20 28.[6] 陈中玉,高连兴.美国花生收获机械现状与发展[J].农机市场,2020(8):57 59.[7] 胡志超.半喂入花生联合收获机关键技术研究[D].南京农业大学,2011.[8] 张亚萍,胡志超,游兆延,等.双筛体多功能花生收获机设计与试验[J].农机化研究,2018,40(11):151 161.[9] 鲁建秋.振动式铺放型花生收获机的设计与仿真[D].秦皇岛:河北科技师范学院,2015.[10] 高连兴,王得伟,董华山,等.链杆式花生起收机翻转放铺装置的设计与试验[J].沈阳农业大学学报,2016,47(1):57 63.(下转第177页)861。
筒子纱自动包装系统的设计与研究的开题报告一、选题背景及意义纱线包装是纱线生产的重要组成部分,包装质量的好坏直接关系到纱线的市场竞争力和客户的满意度。
“筒子纱自动包装系统”的研发,可以提高纱线生产的自动化水平,保证包装质量,减少人力成本。
二、研究目的本项目旨在设计一种筒子纱自动包装系统,解决现有包装机器难以实现自动化、包装速度较慢和包装质量不稳定等问题。
三、研究内容1.系统设计:包括硬件设计和软件设计。
硬件设计主要是机械结构的设计,包括纱线卷盘的传送系统、包装机械手的设计以及机器的外壳设计。
软件设计主要是控制系统的设计和开发,包括微控制器的编程、PLC编程、界面设计等。
2.系统测试:对设计出来的筒子纱自动包装系统进行测试,检测其包装速度、包装质量以及系统的稳定性等。
3.系统改进:在测试的过程中发现存在的问题进行改进,包括机械结构的改善、控制系统的优化等。
四、预期成果设计出一种筒子纱自动包装系统,实现纱线的自动包装,提高包装质量和包装速度,降低人力成本。
五、研究方法采用文献资料法、实地调研法、试验验证法和数据分析法等研究方法,通过查阅相关文献,了解纱线包装系统的结构和原理,对市场上已有的包装机器进行分析和测试,评估其优缺点,对纱线包装系统的自动化设计进行探讨,设计出符合实际需要的筒子纱自动包装系统。
六、研究计划进度安排本项目的总工期为一年,按照以下进度安排进行:1.前期调研和文献搜集(一个月)2.系统设计和机械制造(三个月)3.软件编程和控制系统测试(四个月)4.系统整体测试和改进(两个月)5.撰写毕业论文(两个月)七、研究过程中可能遇到的困难及解决方法1.系统设计难度大:通过查阅相关文献和与专业人士交流,完善设计方案,充分利用数字化技术和计算机模拟分析,提高设计水平。
2.机械结构制造精度问题:严格控制零部件的加工精度和尺寸偏差,设计较高的加工要求,确保整个机械结构的精度。
3.系统稳定性问题:多次测试和优化控制系统,改善程序的算法,提高系统的稳定性和可靠性。