长安大学自动控制2015
- 格式:docx
- 大小:16.36 KB
- 文档页数:4
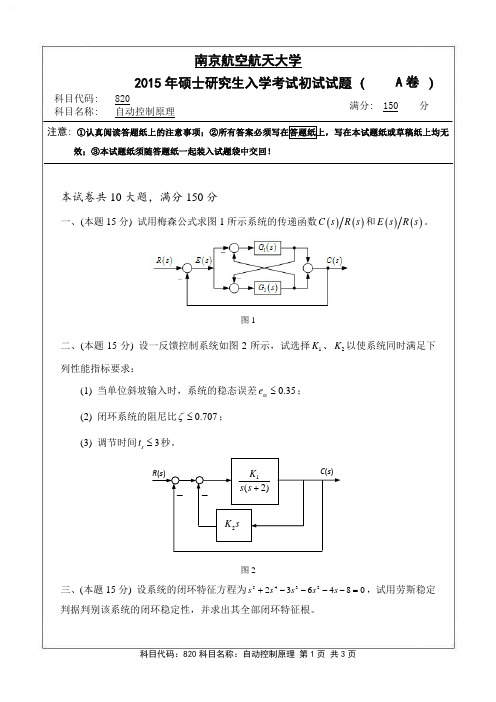
南京航空航天大学2015年硕士研究生入学考试初试试题(A 卷)科目代码: 820科目名称:自动控制原理满分: 150分注意: ①认真阅读答题纸上的注意事项;②所有答案必须写在答题纸上,写在本试题纸或草稿纸上均无效;③本试题纸须随答题纸一起装入试题袋中交回!本试卷共10大题,满分150分一、(本题15分) 试用梅森公式求图1所示系统的传递函数()()C s R s 和()()E s R s 。
图1二、(本题15分) 设一反馈控制系统如图2所示,试选择1K 、2K 以使系统同时满足下列性能指标要求:(1) 当单位斜坡输入时,系统的稳态误差0.35ss e ≤; (2) 闭环系统的阻尼比0.707ζ≤;(3) 调节时间3s t ≤秒。
图2三、(本题15分) 设系统的闭环特征方程为0846322345=−−−−+s s s s s ,试用劳斯稳定判据判别该系统的闭环稳定性,并求出其全部闭环特征根。
1(2)K s s +2K sR (s )C (s )四、(本题15分) 设系统的闭环特征方程为2()(1)0s s a K s +++=,)0(>a1.当10a =时,绘制K : 0~∞变化时的系统闭环根轨迹,并求出系统阶跃响应分别为无超调、阻尼振荡时K 的取值范围;2.若使根轨迹只具有一个非零分离点,求出此时a 的取值?并画出此a 值下K : 0~∞变化时的系统闭环根轨迹。
五、(本题15分) 设单位反馈控制系统的开环传递函数为21)(sas s G +=,试确定相角裕度为45°时的a 值。
六、(本题15分) 如图3所示,最小相位系统开环对数幅频渐近特性为)(ωL ′,串联校正装置对数幅频特性渐近特性为)(ωc L 。
1.求未校正系统开环传递函数)(0s G 及串联校正装置)(s G c ;2.在图中画出校正后系统的开环对数幅频渐近特性)(ωL ′′,并求出校正后系统的相位裕度γ′′;3.简要说明这种校正装置的特点。



现代控制理论智慧树知到课后章节答案2023年下长安大学长安大学绪论单元测试1.下列语句中,不正确的是()。
A:现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。
B:现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统;C:20世纪50年代中期,空间技术的迅速发展迫切要求建立新的控制原理,以解决诸如把宇宙火箭和人造卫星用最少燃料或最短时间准确地发射到预定轨道一类的控制问题;D:在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时间域方法;答案:现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。
2.通过测量输出量,产生一个与输出信号存在函数关系的信号的元件称为()。
A:给定元件B:放大元件C:反馈元件D:比较元件答案:比较元件3.闭环控制系统的控制方式为()。
A:按扰动信号控制B:按输入信号控制C:按偏差信号控制D:按反馈信号控制答案:按偏差信号控制4.经典控制理论描述系统的数学模型是由高阶线性常微分方程演变来的传递函数,适合分析和设计下列哪种系统()A:非线性系统B:单输入单输出系统C:线性定常系统D:多输入多输出系统答案:单输入单输出系统;线性定常系统5.现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,比经典控制理论所能处理的控制问题要广泛得多,适合分析和设计下列哪种系统()A:非线性系统B:线性时变系统C:多输入多输出系统D:线性定常系统答案:非线性系统;线性时变系统;多输入多输出系统;线性定常系统第一章测试1.系统状态空间实现中选取状态变量不是唯一的,其状态变量的个数是唯一的()A:对 B:错答案:对2.多输入-多输出系统的U-Y 间的传递函数为()A:错 B:对答案:对3.由一个状态空间模型可以确定多个传递函数。

《自动控制原理》习题解答(教学参考用书)自动控制原理教学组西北工业大学自动化学院2009年7月前言这本《自动控制原理习题解答》与西北工业大学自动化学院自动控制原理教学组编写(卢京潮主编)、西北工业大学出版社出版的国家教委“十一五”规划教材《自动控制原理》配套使用。
供任课教师在备课和批改作业时参考。
新的“十一五”规划教材是在原《自动控制原理》教材基础上经修改完成的,新教材基本保留了原教材的体系结构,主要在具体内容上作了进一步的完善和充实,习题也做了相应调整。
这本习题解答的内容主要由负责各章编写任务的老师提供。
为方便教学,在习题解答之后编入了课程进程表和教学大纲(96学时),供任课教师参考查阅。
对教材或习题解答中发现的错误和不妥之处,恳请各位读者及时记录,并转告编者,以便尽快纠正。
谢谢!。
联系人:卢京潮电 话:88431302 (办公室)135******** (手机)Email: lujc0129@编者2009.5目录一.习题解答 (1)第1章习题及解答 (1)第2章习题及解答 (10)第3章习题及解答 (32)第4章习题及解答 (64)第5章习题及解答 (86)第6章习题及解答 (133)第7章习题及解答 (157)第8章习题及解答 (181)二.课程进程表 (208)三.自动控制原理教学大纲 ( 96时) (210)一、 习 题 及 解 答第1章习题及解答1-1 根据图1-15所示的电动机速度控制系统工作原理图,完成:(1) 将a ,b 与c ,d 用线连接成负反馈状态;(2) 画出系统方框图。
解 (1)负反馈连接方式为:,d a ↔c b ↔;(2)系统方框图如图解1-1 所示。
1-2 图1-16是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开、闭的工作原理,并画出系统方框图。
图1-16 仓库大门自动开闭控制系统解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。

电气工程及其自动化专业培养计划一、学制四年制本科。
二、业务培养目标本专业培养具备电工电子技术、自动控制系统、计算机控制技术、近代电力电子技术、电气设计与自动化、建筑智能化等工程技术基础和一定的专业知识,能从事自动控制系统、计算机系统仿真、电力系统及其自动化、城市轨道交通、建筑电气及自动化等方面的研究、设计、开发与应用工作,并富有创新精神的宽口径型的高级专门人才。
三、业务基本要求本专业学生主要学习电路理论、电子技术、控制理论、电磁场理论、电气工程、计算机应用技术、网络技术、建筑智能化技术等方面的基础知识、专业知识,接受较好的工程实践基础训练,具备系统分析与设计、开发与研究、以及计算机软硬件应用等方面的基本能力。
四、毕业生应获得的知识和能力1. 具有较为扎实的本专业必需的自然科学基础知识;2. 系统地掌握本专业较扎实的技术基础理论知识和必要的专业理论知识;3. 具有较好的计算机软硬件基础知识和较强的计算机应用能力;4. 具有较好的英语综合能力,达到国家英语四级或以上水平;5. 较好地掌握远动控制、电力电子技术、信息处理、建筑智能化技术等方面的知识;6. 具有较强的电工电子技术方面的动手能力和必要的自动化方面的工程技能训练;7. 对电气工程及其自动化和电子信息领域的新技术、新动态有一定的了解;8. 具有较宽广的工作适应性,能适应各种领域的电气工程及其自动化和电子信息方面的科技与管理工作;9. 具有一定的人文社会科学、经济管理知识及相关的工程技术知识。
五、主干学科电气工程与自动化、电子信息、控制科学与工程。
六、主要课程电路理论、模拟电子技术、数字电子技术、电子技术实验、微机原理与接口技术、自动控制原理、信号与系统、软件技术基础、电机学、电磁场理论、电力电子技术、单片机原理与应用、电器学、工厂供电、电气传动控制系统、电机矢量分析与控制、轨道交通供电系统、计算机网络、微机控制系统、电气照明等。
七、主要实践环节包括公益劳动、军训、金工实习、计算机程序设计、课程实验、应用软件、综合设计、毕业实习、毕业设计(论文)等。
长安大学
§自动控制原理参考书目:
《自动控制原理(第五版)》胡寿松著,科学出版社2007年
§自动控制原理考试大纲:
《自动控制原理》考试内容包括: 经典控制理论和现代控制理论两大部分。
第一章自动控制的一般概念知识点:控制系统的一般概念:名词术语、发展史、控制系统的分类、控制系统的组成、典型外作用、对控制系统的基本要求基本要求:掌握反馈控制的基本原理、根据系统工作原理图绘制原理方块图第二章控制的数学模型知识点:控制系统动态微分方程的列写用拉普拉斯变换求解线性微分方程的零初态响应与零输入响应运动模态的概念传递函数的定义和性质、典型元部件传递函数的求法控制系统结构图的绘制、等效变换、梅逊公式在结构图和信号流图中的应用基本要求:1.利用复阻抗建立电路结构图 2.熟悉控制系统常用元部件的传递函数 3.掌握控制系统结构图的绘制方法及基本等效变换 4.用等效变换或梅逊公式求结构图或信号流图的各种传递函数第三章线性系统的时域分析法知识点:控制系统时域动态性能指标的定义与计算、误差的定义与稳态误差的计算系统稳定性的定义与判断法则、系统动态性能分析不作要求的内容: 过阻尼二阶系统性能指标的估算公式非零初始
条件下二阶系统的响应过程高阶系统的动态性能估算、赫尔维茨稳定判据动态误差系数、采用串级控制抑制内回路扰动基本要求:1.学会求出一阶系统的阶跃响应、会推导一阶系统动态性能指标的计算公式 2.典型欠阻尼二阶系统动态性能指标的计算、性能指标与特征根的关系 3.改善二阶系统动态性能指标的方法 4.主导极点与偶极子的概念及其应用 5.劳斯判据的应用 6.静态误差系数、系统型别、稳态误差的计算。
7.扰动引起的误差的定义与计算方法8.减小和消除稳态误差的方法第四章线性系统的根轨法知识点:根轨迹的基本概念、根轨迹的模值条件与相角条件、根轨迹绘制的基本法则广义根轨迹、系统性能的分析不作要求的内容: 根轨迹簇基本要求:1.学会由系统的特征方程求开环增益从零到无穷变化时的根轨迹方程(或开环零点、或开环极点从零到无穷变化)2.理解根轨迹的模值方程与相角方程的几何意义3.掌握零度根轨迹与1800度根轨迹的绘制法则4.学会由根轨迹分析系统稳定性、分析参数的选择对系统运动模态的影响第五章线性系统的频域分析法知识点:频率特性的概念及其图示法、开环频率特性的绘制奈奎斯特稳定判据、稳定裕度不作要求的内容: 对数幅相曲线随机信号的频谱、确定闭环频率特性的图解方法基本要求:1.切记稳定系统的正弦响应的稳态输出是与输入同频率的正弦信号,幅值相角均随频率改变;其稳态误差也是与输入同频率的正弦信号,且幅
值相角均改变。
2.掌握频率特性的计算方法 3.掌握典型环节的频率特性,其中振荡环节的两组特征点要记住。
4.开环系统幅相曲线的绘制,对数曲线的绘制,对数坐标系的应用5.由最小相角系统的对数幅频渐近曲线求传递函数 6.奈奎斯特稳定判据、对数稳定判据7.稳定裕度的物理意义,熟练掌握稳定裕度的计算第六章线性系统的校正方法知识点:系统的设计与校正问题、常用校正装置及其特性、串联校正、复合校正不作要求的内容: 串联综合法校正、串联工程设计方法、反馈校正基本要求:串联超前校正网络的设计、串联迟后校正网络的设计串联迟后-超前校正网络的设计、PID校正的特点、复合校正网络的设计第七章线性离散系统的分析与校正知识点:离散系统的基本概念、信号的采样与保持、Z变换定理、离散系统的数学模型离散系统的稳定性与稳态误差、动态性能分析、离散系统的数字校正基本要求:1.采样与保持的物理描述与数学描述、香农采样定理2.掌握零阶保持器的数学描述与频率特性 3.差分方程的概念、差分方程的求取与求解和 4.脉冲传递函数的概念与求法、离散系统输出Z变换的求法 5.z域稳定判据、w域稳定判据、朱利稳定判据 6.离散系统的分析方法第八章非线性控制系统分析知识点:非线性控制系统概述、常见非线性特性及其对系统运动的影响、相平面法、描述函数法不作要求的内容: 由相轨迹绘制时间曲线、非线性控制的逆系统方法基本要求:
(相平面法和描述函数法两种方法自取一种即可)线性系统的相轨迹、等倾线法、开关线、奇点及其类型、非线性系统的相轨迹非线性系统的等效变换、负倒描述函数曲线的绘制、非线性系统稳定性的判断自激振荡的判断、自振参数的确定第九章线性系统的状态空间分析与综合基本要求:1.线性系统的状态空间描述(1) 状态空间的基本概念(2)状态空间表达式的建立(3)状态空间表达式求解方法、状态转移矩阵及其性质(4)传递函数阵 2.线性系统的可控性与可观性(1) 线性系统可控性与可观性的基本概念(2)线性系统可控性与可观性判据(3) 可控标准型与可观标准型 3.线性定常系统的线性变换(1)状态空间线性变换定义和性质(2)对偶原理和规范分解 4. 线性定常系统的反馈结构及设计状态观测器(1)传递函数的实现问题(2)状态反馈与输出反馈(3)极点配置(4)状态观测器设计 5.李雅普洛夫稳定性分析(1)李雅普洛夫意义稳定性的基本概念(2)李亚普诺夫第一法和第二法(3)线性定常系统稳定性分析。