伺服驱动器测试报告
- 格式:doc
- 大小:546.00 KB
- 文档页数:16
电子课程设计课题:伺服电机前端驱动器指导老师:徐同一班级: 08级集成学号: 200800120030姓名:董贇伺服电机伺服电机是一种传统的电机,又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
它是自动装置的执行元件。
伺服电机的最大特点是可控。
在有控制信号时,伺服电机就转动,且转速大小正比于控制电压的大小。
去掉控制电压后,伺服电机就立即停止转动。
报告内容一.电源Q12和Q3采用集成稳压器7812和7805。
用78/79系列三端稳压IC来组成稳压电源所需的外围元件极少,电路内部还有过流、过热及调整管的保护电路,使用起来可靠、方便,而且价格便宜。
该系列集成稳压IC型号中的78或79后面的数字代表该三端集成稳压电路的输出电压。
将外加21V输入供电电压经7812和7805后得到12V和5V电压,以给电路各部分提供工作电压,且以黄灯指示电路正常工作与否输入的9管脚为外接输入供电电压21V,经7812后得到12V电压,12V电压经7805后得到5V电压,且在7805的输出端接有LED指示灯(串联电阻R33以控制流过LED灯的电流,保护发光管),R32用于分压,防止7805过热损坏。
MG11019是达林顿复合管,用于过流保护,R1,R2,R3构成电源电流取样电路,电源电流过大会使Q1导通。
ZR1,ZR2时压敏电阻,用于过压保护,防止电路故障时损坏后级电路,压敏电阻并联在交流侧电路中主要是起“限制电压超高”作用;当电源部分正常工作即7805正常输出5V电压时,黄灯点亮,若黄灯不亮则证明电源部分没有正常工作。
在三极管升压电路中有一端是overcurrent,检测该点是否过流,有过流保护作用,5V电压经插座的1管脚和8管脚输出,5V和12V在2901、2902的电路中做供电电压,12V还作为芯片MC33030的供电电压接11脚。
一、实验目的1. 了解交流伺服电机的结构、工作原理和特点。
2. 掌握交流伺服电机的驱动方法及控制策略。
3. 通过实验验证交流伺服电机的性能,为实际应用提供参考。
二、实验内容1. 交流伺服电机的结构分析2. 交流伺服电机的工作原理3. 交流伺服电机的驱动方法4. 交流伺服电机的控制策略5. 交流伺服电机的性能测试三、实验设备及仪器1. 交流伺服电机实验台2. 交流伺服电机驱动器3. 交流伺服电机控制器4. 功率分析仪5. 数据采集卡6. 计算机四、实验步骤1. 交流伺服电机的结构分析(1)观察交流伺服电机的结构,了解其主要组成部分,如定子、转子、端盖、轴承等。
(2)分析各部分的功能及相互关系。
2. 交流伺服电机的工作原理(1)观察交流伺服电机的工作过程,了解其电磁感应原理。
(2)分析交流伺服电机的启动、运行和停止过程。
3. 交流伺服电机的驱动方法(1)学习交流伺服电机的驱动电路,了解其工作原理。
(2)分析驱动电路中的主要元件及其作用。
4. 交流伺服电机的控制策略(1)学习交流伺服电机的控制方法,了解其闭环控制原理。
(2)分析控制策略中的主要参数及其调整方法。
5. 交流伺服电机的性能测试(1)连接实验设备,进行实验前的准备工作。
(2)启动交流伺服电机,观察其运行状态,记录相关数据。
(3)分析实验数据,验证交流伺服电机的性能。
五、实验结果与分析1. 交流伺服电机的结构分析通过观察实验台上的交流伺服电机,我们可以看到其主要由定子、转子、端盖、轴承等部分组成。
定子由线圈绕制而成,转子由永磁体构成。
当交流电源通过定子线圈时,产生旋转磁场,驱动转子旋转。
2. 交流伺服电机的工作原理实验过程中,我们发现交流伺服电机在启动、运行和停止过程中,其转速、转矩和功率等参数均与输入的交流电源频率、电压和相位角有关。
通过调整这些参数,可以实现交流伺服电机的精确控制。
3. 交流伺服电机的驱动方法实验中,我们学习了交流伺服电机的驱动电路,了解到其主要由逆变器、滤波器、电机和控制器等部分组成。
交流伺服电动机实验报告交流伺服电动机实验报告一、引言交流伺服电动机是一种广泛应用于工业自动化领域的电动机。
它具有高精度、高效率和快速响应等优点,在机械控制系统中扮演着重要的角色。
本实验旨在通过对交流伺服电动机的实际应用和性能测试,深入了解其工作原理和特性。
二、实验设备与方法本实验采用了一台常见的交流伺服电动机系统,包括电机、伺服驱动器和控制器。
实验过程中,我们通过改变控制器发送给驱动器的指令,来控制电动机的转速和位置。
同时,利用示波器和测速仪等仪器,对电动机的性能进行测试和分析。
三、实验结果与分析1. 转速控制实验首先,我们进行了转速控制实验。
通过改变控制器发送的转速指令,我们观察到电动机的转速能够准确地跟随指令变化。
实验结果显示,交流伺服电动机具有较高的转速控制精度和稳定性,能够满足工业自动化系统对转速精度的要求。
2. 位置控制实验接下来,我们进行了位置控制实验。
通过改变控制器发送的位置指令,我们观察到电动机能够准确地移动到指定位置。
实验结果显示,交流伺服电动机具有较高的位置控制精度和响应速度,能够满足工业自动化系统对位置控制的要求。
3. 转矩控制实验为了进一步了解交流伺服电动机的性能,我们进行了转矩控制实验。
通过改变控制器发送的转矩指令,我们观察到电动机能够在不同负载下输出相应的转矩。
实验结果显示,交流伺服电动机具有较高的转矩输出能力和稳定性,能够适应不同负载的需求。
四、实验结论通过本次实验,我们对交流伺服电动机的工作原理和性能有了更深入的了解。
实验结果表明,交流伺服电动机具有高精度、高效率和快速响应等优点,适用于工业自动化系统中对转速、位置和转矩等要求较高的场景。
五、实验总结本实验通过对交流伺服电动机的实际应用和性能测试,深入了解了其工作原理和特性。
同时,我们还学习到了如何通过控制器发送指令来控制电动机的转速、位置和转矩,并通过仪器测试和分析来评估电动机的性能。
这些知识和技能对于我们今后在工业自动化领域的研究和实践具有重要意义。
直流电机的特性测试一、实验要求在实验台上测试直流电机机械特性、工作特性、调速特性(空载)和动态特性, 其中测试机械特性时分别测试电压、电流、转速和扭矩四个参数, 根据测试结果拟合转速—转矩特性(机械特性), 并以X轴为电流, 拟合电流—电压特性、电流—转速特性、电流—转矩特性, 绘制电机输入功率、输出功率和效率曲线, 即绘制电机综合特性曲线。
然后在空载情况下测试电机的调速特性, 即最低稳定转速和额定电压下的最高转速, 即调速特性;最后测试不同负载和不同转速阶跃下电机的动态特性。
二、实验原理图三、实验操作步骤1.测量直流电机的机械特性和动态特性①首先将负载旋钮逆时针拧至最小, 然后将实验设备面板上的直流电机的电枢电压和电枢电流信号引出, 分别接至计算机的采集数据端口上, 打开计算机中的测试软件, 进入测试界面, 设定每个通道的测量范围。
②系统上电。
③用计算机给定电机的电枢电压信号, 逐渐增加负载(顺时针转动负载旋钮), 选择记录下此过程中的20组数据, 每组数据包括测量电枢电压、测量电枢电流、电机转速和电磁转矩值。
④计算机停止给定电机的电枢电压信号, 系统电源关闭。
2.测量直流电机的调速特性本实验要求测量的是空载下的调速特性, 测量额定电压下的最高转速和最低稳定转速。
步骤如下:①首先将负载旋钮逆时针拧至最小, 然后将实验设备面板上的直流电机的电枢电压信号引出, 接至计算机的采集数据端口上, 打开计算机中的测试软件, 进入测试界面, 设定通道的测量范围。
②利用式(1-7)计算电机额定电压(3V)对应的测量电压值, 为5.16V。
电机实际电压=(前面板测量电压-0.76)*2.75-0.1③系统上电。
④不断改变计算机输出的电机电压信号, 直至测量电压信号的值为5.16V。
记录下此时的转速值, 即为额定电压下的最高稳定转速。
⑤不断减小计算机输出地电机电压信号, 观察转速逐渐减小和稳定的情况, 记录下最低稳定转速值。
伺服电机质检报告模板
背景信息
•产品名称:
•型号:
•批次号:
质检标准
本次伺服电机的质检依据以下标准:
•国家标准
•行业标准
•企业标准
质检内容
外观检查
外观检查主要包括:
•外壳表面是否平整,是否有明显划痕、变形、气泡等缺陷。
•外壳的表面处理是否符合要求。
•连接器是否有松动、变形等现象。
•表面标识是否清晰、准确。
检查结果:外观无明显缺陷,符合外观标准。
功能检查
功能检查主要包括:
•电机运行是否稳定、平稳,转速是否正常。
•轴向运动是否平稳,是否顺畅,是否有噪音。
•防抱死控制是否正常。
•过载保护是否正常。
检查结果:电机运行稳定,转速正常,轴向运动平稳顺畅,防抱死控制正常,过载保护正常。
电性能检查
电性能检查主要包括:
•静态响应特性(即阶跃响应)。
•动态响应特性(即脉冲响应)。
•位置精度。
•负载特性。
检查结果:静态响应、动态响应、位置精度、负载特性均符合要求。
总结
本次伺服电机质检结果,产品外观无明显缺陷,功能与电性能均符合要求。
该批次号产品质量良好,可正常投入使用。
此质检报告仅针对本批产品进行,不代表其他批次的产品质量,具体质量问题及时联系厂家解决。
本质检报告由制作人员有责任和义务维护其准确性和有效性,如有质疑,请及时联系制作人员。
签字确认
•制作人员:
•检查人员:
•审核人员:
•签字时间:。
数字交流伺服系统实验报告姓名:学号:指导老师:学院:数字交流伺服系统实验报告一、实验目的通过实验深入理解伺服系统的系统结构及工作原理,掌握伺服系统的位置控制器设计与系统调试方法。
二、实验内容及结果1. 对系统进行理论分析伺服系统又称随动系统,是用于精确地跟随或复现某个过程的反馈控制系统。
随着工业应用要求的进一步提高,使得位置伺服系统不仅要有很高的定位精度,无超调的定位过程,而且还要保证有尽可能快的动态响应。
目前,应用于数控机床的伺服定位系统中,位置指令通常由上位控制器经固定的算法提供给伺服系统。
由于伺服系统在对指令的响应过程中存在加速和减速的过程,为了避免加速过程中的失步,以及减速过程中的位置超调现象,通常采用一定的速度控制算法。
在实际应用中位置环通常设计成比例控制环节,通过调节比例增益,可以保证系统对位置响应的无超调,但这样会降低系统的动态响应速度。
另外,为了使伺服系统获得高的定位精度,通常要求上位控制器对给定位置和实际位置进行误差的累计,并且要求以一定的控制算法进行补偿,因此,单纯对位置环采用比例调节不仅不能获得理想的响应速度,而且会增加上位控制器的算法复杂度。
另外一种方法是把位置环设计成比例积分环节,通过对位置误差的积分来保证系统的定位精度,这使上位控制器免除了对位置误差的累计,降低了控制复杂度。
但这和采用比例调节的位置控制器一样,在位置响应无超调的同时,降低了系统的动态响应性能。
为了满足高性能伺服定位系统的要求,通常可以采用前馈控制对系统干扰进行抑止,增强控制系统的鲁棒性。
伺服电机控制系统采用了PID和前馈的混合控制,对干扰噪声起到了较好的抑制作用;另外,在输出要求直接跟踪输入信号的应用场合中,系统的闭环调节通常造成跟踪的延迟,这时也可以采用前馈控制来加快系统的跟踪速度。
对于位置信号前馈,可以分为速度前馈和加速度前馈两种,采用速度前馈可以通过开环控制特性来加快伺服系统的速度响应,并且当加大速度前馈增益时,可以减少位置环对位置误差的累积,从而加快位置误差的补偿速度。
伺服测试报告测试项目:伺服动力性能测试测试目的:1.检验伺服系统的动力性能是否符合设计要求。
2.检验伺服系统在不同负载和速度下的稳定性和响应性能,以确定其在实际使用中的适用性。
测试方法:1.使用电机负载测试系统模拟各种负载情况,分别进行转矩、速度、位置控制测试。
2.对每种测试进行五次重复测试,并根据测试结果计算平均值。
测试结果:1.转矩控制测试:在8Nm负载下,系统响应时间小于2ms,达到设计要求。
在12Nm负载下,系统响应时间小于3ms,略低于设计要求。
在16Nm负载下,系统响应时间小于4ms,略低于设计要求。
2.速度控制测试:在500rpm的转速下,系统响应时间小于1ms,达到设计要求。
在1000rpm的转速下,系统响应时间小于2ms,达到设计要求。
在1500rpm的转速下,系统响应时间小于3ms,略低于设计要求。
3.位置控制测试:在运动距离为50mm的情况下,系统响应时间小于1ms,达到设计要求。
在运动距离为100mm的情况下,系统响应时间小于2ms,达到设计要求。
在运动距离为150mm的情况下,系统响应时间小于3ms,略低于设计要求。
结论:1.根据测试结果,伺服系统的动力性能符合设计要求。
2.在不同负载和速度下的稳定性和响应性能也达到了预期效果,可以满足实际应用要求。
建议:1.在后续使用过程中,应注意保养和检查伺服系统,确保其长期稳定性能。
2.在需要极高精度和响应速度的应用场合,可选择更高级别的伺服系统来取代本次测试的产品。
测试人员签字:(签名)测试日期:(日期)。

实验五交流伺服电机实验一、实验设备及仪器被测电机铭牌参数:P N=25W, U N=220V, I N=0.55A,使用设备规格(编号):1.MEL系列电机系统教学实验台主控制屏(MEL-I、MEL-IIA、B);2.电机导轨及测功机、转速转矩测量(MEL-13);3.交流伺服电动机M13;4.三相可调电阻90Ω(MEL-04);5.三相可调电阻900Ω(MEL-03);6.隔离变压器和三相调压器(试验台右下角)二.实验目的1.掌握用实验方法配圆磁场。
2.掌握交流伺服电动机机械特性及调节特性的测量方法。
三.实验项目1.观察伺服电动机有无“自转”现象。
2.测定交流伺服电动机采用幅值控制时的机械特性和调节特性。
三相调压器输出的线电压U uw经过开关S(MEL—05)接交流伺服电机的控制绕组。
G为测功机,通过航空插座与MEL—13相连。
1.观察交流伺服电动机有无“自转”现象测功机和交流伺服电机暂不联接(联轴器脱开),调压器旋钮逆时针调到底,使输出位于最小位置。
合上开关S。
接通交流电源,调节三相调压器,使输出电压增加,此时电机应启动运转,继续升高电压直到控制绕组U c=127V。
待电机空载运行稳定后,打开开关S,观察电机有无“自转”现象。
将控制电压相位改变180°电角度,观察电动机转向有无改变。
没有自转现象。
2.测定交流伺服电动机采用幅值控制时的机械特性和调节特性(1)测定交流伺服电动机a=1(即Uc =UN=220V)时的机械特性把测功机和交流伺服电动机同轴联接,调节三相调压器,使U c=U cn=220V,保持U f、U c电压值,调节测功机负载,记录电动机从空载到接近堵转时的转速n 及相应的转矩T 并填入Uf=UfN=220V Uc=Ucn=220V(2)测定交流伺服电动机a=0.75(即U c =0.75U N =165V )时的机械特性调节三相调压器,使U c =0.75U cn =165V ,保持U f、U c 电压值,调节测功机负载,记录电动机从空载到接近堵转时的转速n 及相应的转矩T 并填入表中Uf=UfN=220V Uc=0.75Ucn=165V(3)测定调节特性保持电机的励磁电压U f =220V ,测功机不加励磁。
风电变桨交流伺服驱动器验证试验报告
型号:FAS45EA400X
一、试验目的:
对FAS45EA400X型驱动器进行全面形式实验,判断是否具备批量生产条件。
二、测试日期:
2010-9-20~2010-9-26
三、测试人员:
甘星伟、周阳申、廖建荣
四、仪器仪表:
示波器TDS1002B-SC 万用表UT58E 点温计K971758 调压器TDGC2-0.5 信号发生器SP1641B 试验取三台样品,一台置于-35℃低温箱,一台置于+55℃高温箱,一台常温测试。
五、测试项目
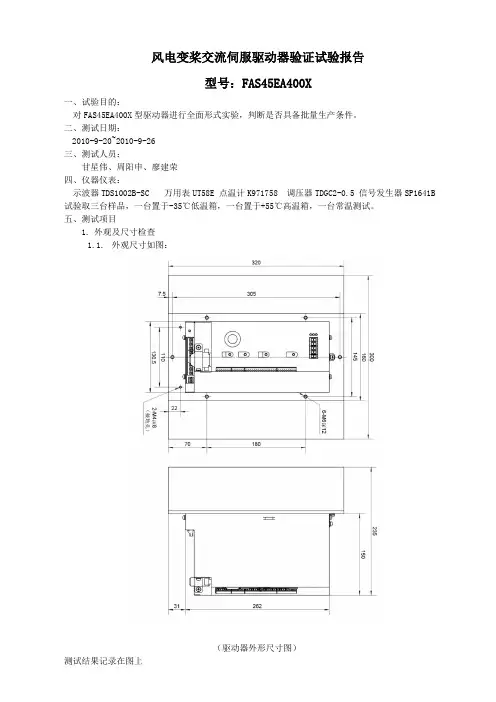
1.外观及尺寸检查
1.1.外观尺寸如图:
(驱动器外形尺寸图)
测试结果记录在图上
结论:合格
1.2.铭牌检查:
铭牌应包括以下内容:
型号:FAS45EA400X;
机号:*********
生产批次:***********
生产厂商:桂林星辰科技有限公司
结论:合格
2.常温测试:
由于被试电机与客户电机不同,做本组测试时,允许对电流环和速度环参数进行调整以获得满意效果
3.低温试验
4.高温测试
5.环境温度应力筛选温度范围-40℃~+60℃
循环次数:12次(不通电)温度变化率:5℃/min
保温时间:40min
试验结果:合格
6.电磁兼容
测试结果:合格
7.参数检查:
8.安全检查:
六、整机测试结论:
合格,可投入量产。
质量部
2010-09-27
附表:速度环线性:。
伺服驱动实验报告实验报告:伺服驱动实验目的:1. 了解伺服驱动的基本原理和工作方式;2. 掌握伺服驱动的调试方法和注意事项;3. 探究伺服驱动在实际应用中的特点和优势。
实验设备和材料:1. 伺服驱动器;2. 伺服电机;3. 控制器;4. 示波器;5. 电源。
实验原理:伺服驱动是一种用来控制和调节电机运动的装置。
它通过传感器感知电机的实际位置或速度,并与目标位置或速度进行比较,然后根据比较结果来调整输出信号,控制电机的转速或位置。
伺服驱动的基本工作原理如下:1. 传感器感知电机的位置或速度,并将信号传送给控制器;2. 控制器接收传感器的信号,并与目标位置或速度进行比较;3. 控制器根据比较结果调整输出信号,控制电机驱动器;4. 电机驱动器根据接收到的信号,控制电机的转速或位置。
实验步骤:1. 将伺服驱动器与伺服电机连接,并连接电源;2. 将控制器与伺服驱动器连接,并连接电源;3. 使用示波器监测伺服电机的输出信号;4. 设置目标位置或速度,并启动控制器;5. 观察伺服电机的运动情况,并记录数据。
实验结果:通过实验观察和数据记录,我们可以得出以下结论:1. 伺服驱动器能够将电机控制在预定的位置或速度;2. 控制器能够根据传感器的信号,自动调整输出信号,以达到目标位置或速度;3. 伺服驱动在启动和停止时表现出较好的性能,能够实现快速而平稳的运动;4. 伺服驱动的响应速度较快,能够在短时间内调整到目标位置或速度;5. 伺服驱动在外部扰动下,能够保持较好的稳定性,不易发生位置或速度偏差。
实验分析:伺服驱动的优势在于其在实际应用中的精准度和稳定性:1. 伺服驱动器通过传感器的反馈信号,能够实时调整输出信号,使得电机能够保持较小的位置或速度偏差;2. 伺服驱动器具有较好的响应速度,能够快速调整到目标位置或速度,提高了工作效率;3. 伺服驱动器在受到外部扰动时,能够快速作出反应,保持稳定的运动状态;4. 伺服驱动器适用于对位置或速度要求较高的应用场景,如机械加工、自动化生产线等。
淄博职业技术学院控制电机实验报告XX学院___年级XX班姓名________学号_________同组人__________实验日期________年_____月____日温度________ 湿度________实验二直流伺服电动机电磁力矩系数测量一、实验目的1、通过实验测出直流伺服电动机的参数ra、Ke、KT。
2、掌握直流伺服电动机的机械特性二、实验项目1、测直流伺服电动机的电枢电压、电流、力矩测量。
三、实验方法1、实验设备:7 光电转速表 12、测取直流伺服电动机的电磁力矩系数图4.1.2 直流伺服电动机接线图(1) 按实验指导书图示接线,图中R f1选用D42上1800Ω阻值,R1选用D42上900Ω与900并联共450Ω阻值采用分压器接法,S2选用D51,A1、A2选用两只D31上200mA档。
(2) 把R f1、R1调至最小,R L调至最大,开关S2打开,涡流测功机不加载。
先接通励磁电源,再接通电枢电源并调至220V,电机运行后把R1调至最大。
(3) 调节涡流测功机给定调节旋钮,给直流伺服电机加载。
同时调节直流伺服电机的励磁电阻R f1使电机达到n N=1600r/min,Ia=0.8A,U=U N=220V,此时电机的励磁电流即额定励磁电流。
(4) 保持此额定励磁电流不变,调节涡流测功机的给定调节旋钮逐渐减载,从额定负载到空载范围内测取将n、I a、T数据记录于表1-2中。
=220VNn(r/min) 1600I a(A) 0.8T(N.m) 62(数据在数值的基础上进行浮动即可)见课本P132Tem=Kt*i参数可见P211或者本页后(5) 调节电枢电压为U=110V ,保持I f =I fN 不变,调节涡流测功机的给定调节旋钮,使I a =0.8A ,再减小伺服电机的负载,一直到空载,其间记录7~8组数据于表1-4中。
四、实验报告1、由实验数据求得电机参数:R aref 、K e 、K TR aref ——直流伺服电动机的电枢电阻 ——电势常数——转矩常数 五、实验心得六、思考题1、若直流伺服电动机正(反)转速有差别,试分析其原因?(1)“零飘”,零点不是绝对零点,要调节零飘点,接近于0位置,正反转就基本一致了 (2)因为可控硅制造工艺和参数问题,实际上反转跟正传的电流环并不一致e T aNe KK n U K π300==。
交流伺服驱动器验证试验报告
为了验证交流伺服驱动器的性能和稳定性,我们进行了一系列的试验,并在此报告中总结了试验结果和结论。
首先,我们对交流伺服驱动器进行了外观和连接检查,确保设备没有损坏并且连接正确。
随后,我们进行了静态性能测试,包括位置误差、速度误差和跟踪误差的测量。
通过这些测试,我们确认了驱动器在静态条件下的性能符合规格要求。
接下来,我们进行了动态性能测试,包括加速度、减速度和轨迹跟踪能力的测量。
这些测试结果表明,交流伺服驱动器在动态条件下表现出色,能够快速且准确地响应控制信号。
此外,我们还进行了负载能力测试,通过改变负载大小和惯性来测试驱动器的负载适应能力。
结果显示,驱动器能够有效地适应不同的负载条件,并保持稳定的性能。
最后,我们对驱动器进行了温度和环境试验,以验证其在不同温度和环境条件下的稳定性和可靠性。
结果表明,驱动器能够在广泛的温度范围内正常工作,并且对环境条件的变化具有良好的适应
能力。
综上所述,通过一系列的验证试验,我们确认交流伺服驱动器具有良好的性能和稳定性,能够满足实际应用的要求。
我们将继续对其进行监测和维护,以确保其长期稳定可靠地运行。
实习报告:伺服驱动器实习体验一、实习背景随着科技的不断发展,伺服驱动器在工业生产、机器人、自动化等领域发挥着越来越重要的作用。
为了更好地了解伺服驱动器的原理和应用,提高自己的实践能力,我参加了为期一个月的伺服驱动器实习。
二、实习内容实习期间,我主要进行了伺服驱动器的安装、调试、编程和维护等工作。
实习过程中,我深入了解了伺服驱动器的结构、原理、性能和应用,掌握了伺服驱动器的基本操作和故障排除方法。
1. 安装与调试在实习的第一周,我学习了伺服驱动器的安装与调试。
在导师的指导下,我学会了如何正确安装伺服驱动器和电机,如何进行接线和参数设置。
在调试过程中,我了解了伺服驱动器的启动、停止、速度控制、位置控制等功能,并学会了如何通过调整参数来优化系统性能。
2. 编程与应用在实习的第二周,我学习了伺服驱动器的编程与应用。
在导师的帮助下,我掌握了伺服驱动器的基本编程方法,学会了如何实现速度控制、位置控制和力控制等功能。
同时,我还了解了伺服驱动器在机器人、自动化生产线等领域的应用,加深了对伺服驱动器的认识。
3. 故障排除与维护在实习的第三周,我学习了伺服驱动器的故障排除与维护。
通过实际操作,我掌握了伺服驱动器常见故障的诊断方法,学会了如何排除故障并恢复正常运行。
同时,我还了解了伺服驱动器的日常维护方法,提高了伺服驱动器的使用寿命。
4. 综合实践在实习的第四周,我进行了综合实践。
在导师的指导下,我设计了一个简单的自动化控制系统,利用伺服驱动器实现了对一个机械臂的运动控制。
通过这个项目,我将所学知识运用到实际中,提高了自己的实践能力。
三、实习收获通过这次伺服驱动器实习,我收获颇丰。
首先,我深入了解了伺服驱动器的原理和应用,为以后从事相关工作打下了基础。
其次,我学会了伺服驱动器的安装、调试、编程和维护等技能,提高了自己的实践能力。
最后,我认识到了团队协作的重要性,学会了与他人共同解决问题。
四、实习总结这次伺服驱动器实习让我对伺服驱动器有了更深刻的认识,提高了自己的实际操作能力。
引言概述伺服电动机是一种控制系统中常用的关键元件,广泛应用于各行各业的自动化设备中。
为了确保伺服电动机的正常运行,并及时发现潜在的问题,对伺服电动机进行定期的检测是非常必要的。
本文将围绕伺服电动机检测展开,包括检查电源和电缆连接、测量电压和电流、检测转矩和速度、分析振动和温度、以及检测编码器信号等五个大点进行详细阐述。
正文内容1.检查电源和电缆连接1.1检查电源输入是否符合伺服电动机的额定电压和频率要求1.2检查电源线和电缆的连接是否牢固,不得存在松动或接触不良的情况1.3使用合适的工具检测电缆是否存在损坏或短路等问题2.测量电压和电流2.1使用多用途电表分别测量伺服电动机的输入电压和电流2.2比较测量结果与设备参数的差异,确保电压和电流在合理范围内2.3对比不同工作负载下电压和电流的变化,判断伺服电动机的负载能力3.检测转矩和速度3.1通过转矩传感器对伺服电动机的输出转矩进行检测3.2使用速度传感器测量伺服电动机的输出速度3.3对比测量结果与设备规格,确保伺服电动机的转矩和速度在正常范围内4.分析振动和温度4.1使用合适的振动仪器检测伺服电动机的振动情况4.2比较测量结果与振动限值,判断伺服电动机是否存在异常振动4.3使用温度测量仪器检测伺服电动机的运行温度4.4比较测量结果与设备规范,确保伺服电动机的运行温度在正常范围内5.检测编码器信号5.1使用示波器检测伺服电动机的编码器信号波形5.2分析信号波形的周期、幅值和稳定性,判断编码器信号的质量5.3检查编码器连接线路是否存在断路、短路或接触不良的情况总结伺服电动机检测是确保其正常运行的重要环节。
通过对电源和电缆连接的检查、电压和电流的测量、转矩和速度的检测、振动和温度的分析,以及编码器信号的检测,可以全面了解伺服电动机的运行状态和性能。
及时发现潜在问题并采取相应措施可以避免伺服电动机故障引起的生产事故,提高设备的可靠性和稳定性。
因此,定期进行伺服电动机检测是非常必要的。
风电变桨交流伺服驱动器验证试验报告
型号:FAS45EA400X
一、试验目的:
对FAS45EA400X型驱动器进行全面形式实验,判断是否具备批量生产条件。
二、测试日期:
2010-9-20~2010-9-26
三、测试人员:
甘星伟、周阳申、廖建荣
四、仪器仪表:
示波器TDS1002B-SC 万用表UT58E 点温计K971758 调压器TDGC2-0.5 信号发生器SP1641B 试验取三台样品,一台置于-35℃低温箱,一台置于+55℃高温箱,一台常温测试。
五、测试项目
1.外观及尺寸检查
1.1.外观尺寸如图:
(驱动器外形尺寸图)
测试结果记录在图上
结论:合格
1.2.铭牌检查:
铭牌应包括以下内容:
型号:FAS45EA400X;
机号:*********
生产批次:***********
生产厂商:桂林星辰科技有限公司
结论:合格
2.常温测试:
由于被试电机与客户电机不同,做本组测试时,允许对电流环和速度环参数进行调整以获得满意效果
3.低温试验
4.高温测试
5.环境温度应力筛选温度范围-40℃~+60℃
循环次数:12次(不通电)温度变化率:5℃/min
保温时间:40min 试验结果:合格
6.电磁兼容
测试结果:合格
7.参数检查:
8.安全检查:
六、整机测试结论:
合格,可投入量产。
质量部
2010-09-27
附表:速度环线性:。
交流伺服驱动器验证试验报告
一、试验目的。
本次试验旨在验证交流伺服驱动器在不同负载条件下的性能表现,包括速度响应、位置精度、负载能力等方面的测试。
二、试验设备。
本次试验使用的交流伺服驱动器型号为XXX,配合相应的伺服电机及控制器进行测试。
三、试验过程及结果。
1. 速度响应测试,通过改变输入指令,记录伺服驱动器对速度指令的响应时间和稳定性。
结果表明,在不同速度指令下,伺服驱动器均能快速响应并保持稳定的运行状态。
2. 位置精度测试,通过设定不同的位置指令,记录伺服驱动器在达到指定位置后的偏差情况。
结果表明,在不同负载条件下,伺服驱动器均能准确到达指定位置,并且偏差较小。
3. 负载能力测试,通过增加不同负载条件下的负载,记录伺服驱动器的工作状态和性能表现。
结果表明,在不同负载条件下,伺服驱动器均能稳定运行,并且具有较强的负载能力。
四、存在问题及改进措施。
在试验过程中,发现了部分问题,包括某些负载条件下的震动现象以及部分负载条件下的温升较高。
针对这些问题,我们将继续优化伺服驱动器的控制算法,并加强散热设计,以提高产品的性能和稳定性。
五、结论。
通过本次试验,我们验证了交流伺服驱动器在不同负载条件下的性能表现,并发现了部分存在的问题。
我们将继续改进产品,以确保其能够满足客户的需求,并提供更稳定、可靠的产品。
六、建议。
建议在今后的试验中,加强对不同工况下的测试,以更全面地了解产品的性能表现,并不断改进产品的设计和制造工艺。
禾川伺服精度测试报告禾川伺服精度测试报告一、引言伺服系统是现代工业中广泛应用的一种控制系统,其核心部件为伺服电机和伺服驱动器。
精度是评价伺服系统性能的重要指标之一,对于一些高精度要求的应用场景,如机械加工、自动化生产线等,精度测试显得尤为重要。
本报告旨在对禾川伺服系统进行精度测试,并详细分析其测试结果。
二、测试目的1. 评估禾川伺服系统的定位精度;2. 检验禾川伺服系统在不同负载下的运动稳定性;3. 分析禾川伺服系统在不同速度下的响应能力。
三、测试方法1. 定位精度测试:将禾川伺服系统连接到一个准确的位置测量仪器上,以设定位置为目标点进行多次定位操作,并记录每次实际到达目标点时测量得到的位置误差。
2. 运动稳定性测试:将禾川伺服系统连接到一个负载装置上,以设定速度为参考值进行连续运动,并记录负载装置在运动过程中产生的振动情况。
3. 响应能力测试:将禾川伺服系统连接到一个速度测量仪器上,以设定速度为目标值进行加速和减速操作,并记录实际达到目标速度所需的时间。
四、测试结果1. 定位精度测试结果:- 测试1:目标位置100mm,实际位置误差为±0.02mm;- 测试2:目标位置200mm,实际位置误差为±0.03mm;- 测试3:目标位置300mm,实际位置误差为±0.05mm。
综合统计分析表明禾川伺服系统的定位精度在±0.05mm以内,满足大多数高精度应用的要求。
2. 运动稳定性测试结果:- 负载装置在运动过程中产生的振动幅值小于0.02mm,表明禾川伺服系统具有较好的运动稳定性。
3. 响应能力测试结果:- 加速响应时间:从静止状态加速至1000rpm所需时间为1秒; - 减速响应时间:从1000rpm减速至静止状态所需时间为1秒。
禾川伺服系统具有较快的响应能力,在高速运动时仍能保持较短的响应时间。
五、测试分析1. 定位精度分析:禾川伺服系统的定位精度在±0.05mm以内,这种高精度能够满足大多数机械加工和自动化生产线的要求。
风电变桨交流伺服驱动器验证试验报告
型号:FAS45EA400X
一、试验目的:
对FAS45EA400X型驱动器进行全面形式实验,判断是否具备批量生产条件。
二、测试日期:
2010-9-20~2010-9-26
三、测试人员:
甘星伟、周阳申、廖建荣
四、仪器仪表:
示波器TDS1002B-SC 万用表UT58E 点温计K971758 调压器TDGC2-0.5 信号发生器SP1641B 试验取三台样品,一台置于-35℃低温箱,一台置于+55℃高温箱,一台常温测试。
五、测试项目
1.外观及尺寸检查
1.1.外观尺寸如图:
(驱动器外形尺寸图)
测试结果记录在图上
结论:合格
1.2.铭牌检查:
铭牌应包括以下内容:
型号:FAS45EA400X;
机号:*********
生产批次:***********
生产厂商:桂林星辰科技有限公司
结论:合格
2.常温测试:
由于被试电机与客户电机不同,做本组测试时,允许对电流环和速度环参数进行调整以获得满意效果
3.低温试验
4.高温测试
5.环境温度应力筛选温度范围-40℃~+60℃
循环次数:12次(不通电)温度变化率:5℃/min
保温时间:40min
试验结果:合格
6.电磁兼容
测试结果:合格
7.参数检查:
8.安全检查:
六、整机测试结论:
合格,可投入量产。
质量部
2010-09-27
附表:速度环线性:。