第五章 频率响应法3
- 格式:ppt
- 大小:1.94 MB
- 文档页数:81

第 5 章频率响应法频率响应法是控制理论的重要组成部分,是分析和综合控制系统的一种工程实用方法。
它不仅适用于单变量系统,而且也可以推广至多变量系统。
它的特点是:不必求解系统的高阶微分方程,可直接根据频率特性曲线的形状及其特征量来研究系统的性能。
其突出的优点是:物理意义明确,可用实验的方法求出系统的频率特性和传递函数;而且计算量小,方法形象和直观,因而广为工程界所采用。
根据它在系统分析和综合中的应用,将频率响应法分为两部分:频率响应分析法和频率响应综合法,并分别在第 5 章和第6 章讨论。
在这一章里主要介绍:频率响应法的基本概念和控制系统频率特性曲线的绘制方法,以及它在系统分析与综合中的应用,重点在于其基本概念和应用。
5.1 频率特性频率响应法起源于通讯学科。
它的基本思想是:将控制系统的变量也看作是信号;这些信号通过傅里叶(Fourier) 分析,对于周期信号可展开为傅氏级数,对于非周期信号可进行傅氏变换,它们均可视为由不同频率成分的正弦信号所合成的;线性定常系统各个变量的运动,就是系统对各个不同频率信号响应叠加的结果。
频率响应法的优点:第一,这种方法具有鲜明的物理意义。
第二,可以用实验方法测出系统的频率特性,并获得其传递函数以及其它形式的数学模型。
第三,它是一种图解法,形象直观、计算量小。
频率响应法也存在一定的局限性:首先它只适用于线性定常系统。
其次,频率响应法的筒便和实用性是以它的工程近似性为代价的。
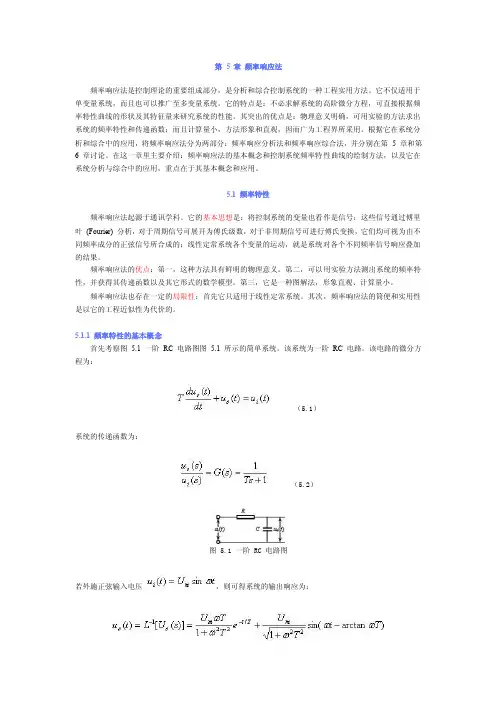
5.1.1 频率特性的基本概念首先考察图 5.1 一阶RC 电路图图 5.1 所示的简单系统。
该系统为一阶RC 电路。
该电路的微分方程为:(5.1)系统的传递函数为:(5.2)图 5.1 一阶 RC 电路图若外施正弦输入电压,则可得系统的输出响应为:式中等号右边的第一项为输出响应的暂态分量,第二项为输出响应的稳态分量。
当t趋于无穷大时第一项的暂态分量将趋于零,故系统的稳态输出响应为:可以看到:在正弦输入电压作用下系统的稳态输出,是与输入同频率的正弦电压,其幅值为输入幅值的倍,相角比输入的迟后arctgωT。
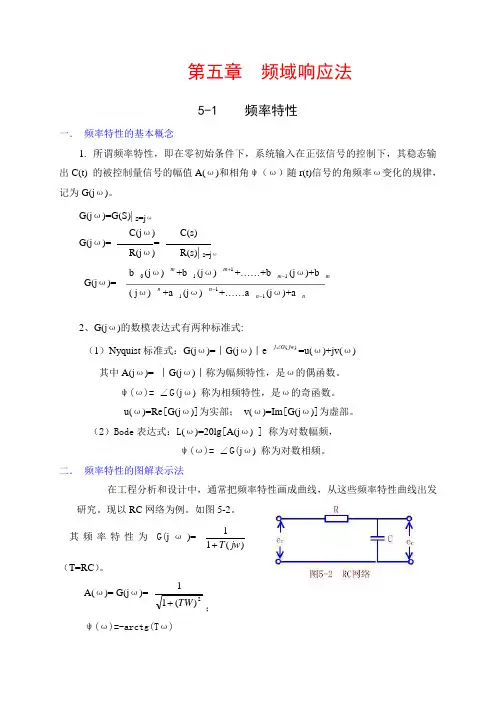
第五章 频域响应法5-1 频率特性一. 频率特性的基本概念1. 所谓频率特性,即在零初始条件下,系统输入在正弦信号的控制下,其稳态输出C(t) 的被控制量信号的幅值A(ω)和相角ψ(ω)随r(t)信号的角频率ω变化的规律,记为G(j ω)。
G(j ω)=G(S)| s=j ω C(j ω) C(s)G(j ω)== R(j ω) R(s)| s=j ωb 0(j ω) m +b 1(j ω) 1+m +……+b 1-m (j ω)+b m G(j ω)=( j ω) n +a 1(j ω) 1-n +……a 1-n (j ω)+a n2、G(j ω)的数模表达式有两种标准式: (1)Nyquist 标准式:G(j ω)=︱G(j ω)︱e)(jw G j ∠=u(ω)+jv(ω)其中A(j ω)= ︱G(j ω)︱称为幅频特性,是ω的偶函数。
ψ(ω)= ∠G(j ω) 称为相频特性,是ω的奇函数。
u(ω)=Re [G(j ω)]为实部; v(ω)=Im [G(j ω)]为虚部。
(2)Bode 表达式:L (ω)=20lg [A(j ω) ] 称为对数幅频,ψ(ω)= ∠G(j ω) 称为对数相频。
二. 频率特性的图解表示法在工程分析和设计中,通常把频率特性画成曲线,从这些频率特性曲线出发研究。
现以RC 网络为例。
如图5-2。
其频率特性为G(j ω)=)(11jw T +(T=RC )。
A(ω)= G(j ω)=2)(11TW +;ψ(ω)=-arctg(T ω)1.极坐标图----Nyquist图当ω=0→∞变化时,A(ω)和φ(ω)随ω而变,以A(ω)作幅值,φ(ω)作相角的端点在s平面上形成的轨迹,称Nyquist曲线(幅相频率特性曲线)简称幅相曲线即Nyquist图,是频率响应法中常用的一种曲线。
2、对数坐标图----Bode图对数频率特性曲线又称Bode曲线,包括对数幅频和对数相频两条曲线。
学习方法1、熟悉数学工具——解决抽象问题。
(自找原型,自作图等)2、熟练使用图形等设计方法——避开复杂的数学运算。
1、机械:线性齐次常微分方程Æ特征方程Æ劳斯判据飞球调速器等线性定常系统分析与设计方法——反馈系统的动态特性2、通讯:反馈放大器等频率响应法1932,Nyquist;1942,Bode;根轨迹法(航空、飞机等)1948,Evans。
线性定常系统分析与设计方法——反馈系统的动态特性3、航空、航天:状态空间法精确模型、高精度传感器、优化指标。
第五章——频率响应设计法原理复杂,方法简单,含义深刻本次课要点1、为什么将频率响应法引入自动控制系统的分析与设计?——优点2、如何将频率响应法应用于自动控制系统的分析与设计?——本章脉络3、频率响应定义及建模方法引言——频域法与自控系统为什么将频域法引入自动控制系统的分析与设计?系统响应(性能)的描述当速度设定值改变或负载变化,蒸气机速度可能会在设定值附近不断振荡,长时间无法收敛。
为描述振荡波动特征,•超调量、调节时间等(时域)•周期、幅度等(频率)M功率放大器负载减速器θ为什么?系统频率响应法优点——在动态反馈控制系统中的应用主要优点:实验确定系统特性:将系统(对象)看作信号变换环节。
可靠的设计方法:对象模型存在不确定性因素(尤其是不确定的小惯性或高频谐振环节)时,仍能得到满意的设计结果。
最简单的补偿设计方法:较少次试探即可得到满意设计结果。
本次课要点1、为什么将频率响应法引入自动控制系统的分析与设计?——优点2、如何将频率响应法应用于自动控制系统的分析与设计?——本章脉络3、频率响应定义及建模方法M功率放大器减速器θM功率放大器负载减速器θ本次课要点1、为什么将频率响应法引入自动控制系统的分析与设计?——优点2、如何将频率响应法应用于自动控制系统的分析与设计?——本章脉络3、频率响应定义及建模方法——频率响应法采用何种模型?第一节频率特性的基本概念(P189,模型及建模方法)频率响应法采用何种模型刻画系统特性?数学描述(点)1.幅相频率特性(Nyquist 曲线、极坐标图)Æ(ω: 0Æ∞)频率特性的图示法——1、Nyquist 曲线对串联组合能手工快捷绘——2、Bode图展示宽广频段系统特性。