第六章——简单的超静定问题
- 格式:doc
- 大小:73.23 MB
- 文档页数:6

杆件的变形 简单超静定问题一 、基本要求1.熟练掌握拉(压)杆变形计算2.熟练掌握圆轴扭转变形计算与刚度条件 3.掌握积分法求梁的弯曲变形4.熟练掌握叠加法求弯曲变形与梁的刚度计算5.理解超静定概念,熟练掌握简单超静定问题的求解方法 6.了解弹性体的功能原理,掌握杆件基本变形的应变能计算二、 内容提要1.拉(压)杆的轴向变形、胡克定律拉(压)杆的轴向变形为l ∆,l l l -=∆1,式中l 、1l 分别为变形前、后杆的长度。
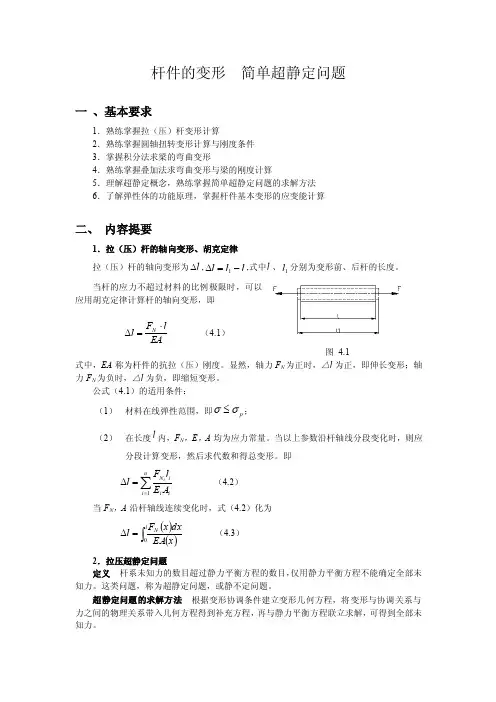
当杆的应力不超过材料的比例极限时,可以应用胡克定律计算杆的轴向变形,即EAlF l N ⋅=∆ (4.1) 图 4.1式中,EA 称为杆件的抗拉(压)刚度。
显然,轴力F N 为正时,△l 为正,即伸长变形;轴力F N 为负时,△l 为负,即缩短变形。
公式(4.1)的适用条件:(1) 材料在线弹性范围,即p σσ≤;(2) 在长度l 内,F N ,E ,A 均为应力常量。
当以上参数沿杆轴线分段变化时,则应分段计算变形,然后求代数和得总变形。
即∑==∆ni ii i N A E l F l i 1(4.2)当F N ,A 沿杆轴线连续变化时,式(4.2)化为 ()()⎰=∆lN x EA dxx F l 0 (4.3)2.拉压超静定问题定义 杆系未知力的数目超过静力平衡方程的数目,仅用静力平衡方程不能确定全部未知力。
这类问题,称为超静定问题,或静不定问题。
超静定问题的求解方法 根据变形协调条件建立变形几何方程,将变形与协调关系与力之间的物理关系带入几何方程得到补充方程,再与静力平衡方程联立求解,可得到全部未知力。
解题步骤: (1) 画出杆件或节点的受力图,列出平衡方程,确定超静定次数; (2) 根据结构的约束条件画出变形位移图,建立变形几何方程; (3) 将力与变形间的物理关系代入变形几何方程,得补充方程; (4)联立静力平衡方程及补充方程,求出全部未知力。
超静定结构的特点:(1) 各杆的内力按其刚度分配;(2) 温度变化,制造不准确与支座沉陷等都可能使杆内产生初应力。
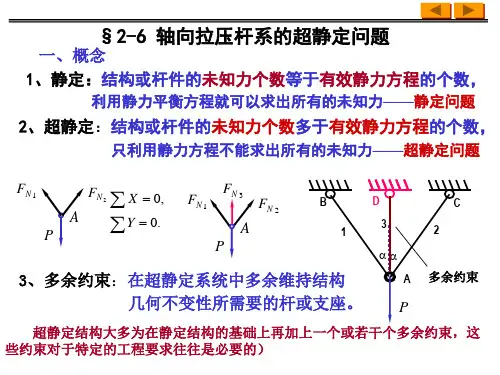
第六章简单的超静定问题知识要点1.超静定问题的概念(1)静定问题结构或结构的约束反力或内力均能通过静力学平衡方程求解的问题。
(2)超静定问题结构或构件的约束反力或内力不能仅凭静力学平衡方程全部求解的问题。
(3)超静定次数未知力(约束反力或内力)数超过独立的静力平衡方程书的数目。
(4)多余约束力超静定问题中,多余维持静力平衡所必需的约束(支座或杆件)。
(5)多余未知力与多余(支座或杆件)相应的支座反力或内力。
(6)基本静定系在求解静定结构时,解除多余约束,并代之以多余未知力,从而得到一个作用有荷载和多余未知力的静定结构,称之为原超静定结构的基本体静定系。
2.静不定问题的解题步骤(1) 静力平衡条件——利用静力学平衡条件,列出平衡方程。
(2) 变形相容条件——根据结构或杆间变形后应保持连续的变形相容条件,作出位移图,由位移图的几何关系列出变形间的关系方程。
(3) 物理关系——应用胡克定律列出力与变形间的关系方程。
(4) 将物理关系代入变形相容条件,得补充方程 。
补充方程和静力平衡方程,二者方程数之和正好等于未知数的个数,联立平衡方程和补充方程,求解全部未知数。
习题详解6-1 试作题6-1图(a )所示等直杆的轴力图。
解 解除题6-1图(a )所示等直杆的约束,代之以约束反力,作受力图,如题6-1图(b )所示。
由静力学平衡条件,03,0=-+=∑F F F FB A Y和变形协调条件0=∆+∆+∆DB CD AC 并将()EAa F EA a F F EA a F B DB A CD A AC -=∆-=∆=∆,22,代入式②,可得 联立式①,③,解得45,47F F F F B A == 轴力如图6-1图(c )所示6-2 题6-2图(a )所示支架承受荷载F=10 kN,1,2,3各杆由同一材料制成,其横截面面积分别为232221200,150,100mm A mm A mm A ===。
试求各杆的轴力。

![[工学]第六章简单的超静定问题](https://uimg.taocdn.com/0639a72708a1284ac95043cb.webp)
第 1 页/共 3 页第六章 容易的超静定问题6-1 一次超静定解除A 端约束,加反力F A 变形协调 0=∆=∆L A 补充方程 0])3()2(2[1=-+-+=∆a F F a F F a F EAL A A A 解得 F F A 47=轴力图: 6-4 一次超静定解除杆2约束,加反力F E 变形协调 EAl F EA lF C C E E C E =∆=∆∆=∆,,2 补充方程 C E F F 2=平衡 F F F M C E A 320=+⇒=∑ 解得 kN F F kN F F C E 30536056====, 从而可得轴力 kN F kN F N N 603021==,应力 MPa AFMPa A F N N 60302211====σσ, 6-9 若杆未碰到支座B ,计算δ>∆L ,则杆必碰到支座B ,一次超静定解除下端支座B ,加反力F B变形协调 δ=∆=∆L B 补充方程 []δ=-++-+-=∆a F F F a F F EAEA a F L B D C B C B )()(221解得 kN aEAF F F D C B 155253=-+=δ (其中a =1.2m ,A =300mm 2)kN F F F F B D C A 85=-+= 轴力图:6-11 一次超静定解除B 端约束,加反力偶M B 变形协调 0=BA ϕ 补充方程 0)(221=-+=p e B p B BA GI aM M GI a M ϕ 解得 e B M M 331=,从而e A M M 3332= 扭矩图:6-14 拉杆EF 与GH 相同,且变形同为C 端位移,故两杆拉力相等 一次超静定第 3 页/共 3 页解除两杆约束,加反力F C 变形协调 ,,2122/EA L F L d LC CA =∆∆=ϕ []L d F M l d F GI C e C p CA )(1111-+-=ϕ (其中L =1m ) 补充方程21114)2(EA F d F M GI d C C e p =- 解得 kN d M F eC 1071==从而AB 段 m kN M T e ⋅==676max 最大切应力 MPa d T W T p 6.3016/31maxmax max ===πτ 6-15(a) 一次超静定解除B 端约束,加反力F B 变形协调 0==∆B B w补充方程 0931433=-=EIa F EI Fa w B B 解得 F F B 2714= 6-16 一次超静定基础梁AB 与CD 间的约束,加互相作使劲F C 变形协调 C B w w =补充方程 23213133)(EI l F EI l F F C C =- 解得 FF C 167135=。