基于等效静态载荷法的平面四杆机构的结构动态优化设计
- 格式:pdf
- 大小:638.90 KB
- 文档页数:4

项目3 平面连杆机构设计由若干个构件通过低副联接而成的机构,称为平面连杆机构,又称平面低副机构。
由四个构件通过低副联接而成的平面连杆机构称为平面四杆机构,它是平面连杆机构中最常见的形式。
平面四杆机构可分为铰链四杆机构和衍生平面四杆机构两大类,前者是平面四杆机构的基本形式,后者由前者演化而来。
本项目通过按给定连杆位置设计平面四杆机构、按给定行程速度变化系数K设计曲柄摇杆机构与曲柄滑块机构,以及平面四杆机构的制作四个工作任务的实施,使学生掌握平面四杆机构设计与机构制作的方法和步骤,完成平面四杆机构的设计与制作。
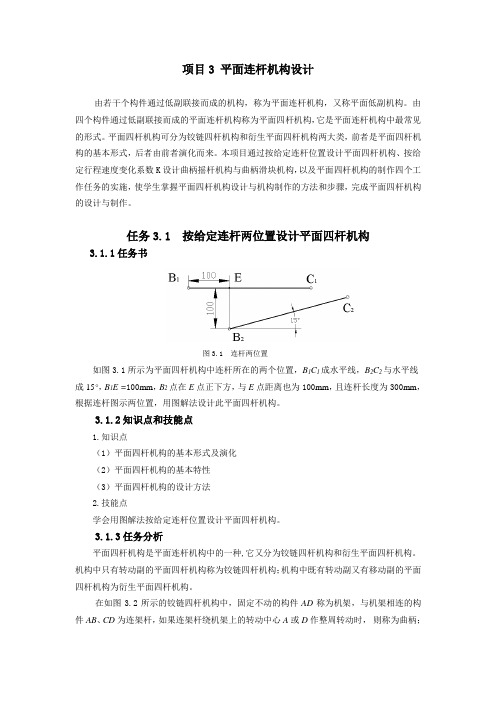
任务3.1 按给定连杆两位置设计平面四杆机构3.1.1任务书图3.1 连杆两位置如图3.1所示为平面四杆机构中连杆所在的两个位置,B1C1成水平线,B2C2与水平线成15°,B1E=100mm,B2点在E点正下方,与E点距离也为100mm,且连杆长度为300mm,根据连杆图示两位置,用图解法设计此平面四杆机构。
3.1.2知识点和技能点1.知识点(1)平面四杆机构的基本形式及演化(2)平面四杆机构的基本特性(3)平面四杆机构的设计方法2.技能点学会用图解法按给定连杆位置设计平面四杆机构。
3.1.3任务分析平面四杆机构是平面连杆机构中的一种,它又分为铰链四杆机构和衍生平面四杆机构。
机构中只有转动副的平面四杆机构称为铰链四杆机构;机构中既有转动副又有移动副的平面四杆机构为衍生平面四杆机构。
在如图3.2所示的铰链四杆机构中,固定不动的构件AD称为机架,与机架相连的构件AB、CD为连架杆,如果连架杆绕机架上的转动中心A或D作整周转动时,则称为曲柄;如果只能在小于360°的某一角度范围内往复摆动,则称为摇杆。
不与机架相连的构件BC 称为连杆。
图3.2 铰链四杆机构结构简图平面四杆机构的设计,是根据给定的机构运动条件,确定机构运动简图的尺寸参数。
为了使机构设计得可靠、合理,往往要考虑几何条件和动力条件。

优秀设计平面四杆机构的运动性能研究摘要:平面四杆机构是主要的常用基本机构之一,应用十分广泛,也是其他多杆机构的基础。
由于连杆机构的性能受机构上繁多的几何参数的影响,呈复杂的非线性关系,无论从性能分析上还是性能综合上都是一个比较困难的工作,尚需作进一步深入研究。
本文基于平面四杆机构的空间模型,将机构实际尺寸转化为相对尺寸,在有限的空间内表示出无限多的机构尺寸类型,从而建立起全部机构尺寸类型和空间点位的一一对应关系,为深入研究平面四杆机构的运动性能与构件尺寸之间的关系提供了基础。
根据曲柄摇杆机构、双曲柄机构、双摇杆机构、单滑块四杆机构的不同特点,详细分析各类机构的运动性能参数与构件尺寸之间的关系,指出构件尺寸的变化对机构运动性能的影响,并绘制相关的运动性能图谱。
针对具有急回特性的Ⅰ、Ⅱ型曲柄摇杆机构,通过深入分析极位夹角与构件尺寸之间的内在关系,获得了Ⅰ型曲柄摇杆机构极位夹角分别小于、等于或大于90°的几何条件以及Ⅱ型曲柄摇杆机构极位夹角一定小于90°的结论,揭示了曲柄摇杆机构设计时作为已知条件的极位夹角和摇杆摆角之间应满足的要求。
本文得出的图谱和相关结论,为工程应用中机构性能分析和机构综合提供了理论依据。
关键词:平面四杆机构空间模型运动性能Plane four clubs institutions of Sports performance research Abstract:The planar four-bar linkages are one type of basic mechanisms, and they are applied very extensively. The performances of the linkages depend on their geometrical parameters and present the complicated non-linear relations. It is necessary to make the further research on them for analysis, synthesis and application of linkages.By using of the three-dimensional models of the planar four-bar mechanisms, the actual sizes of mechanisms are transformed relative ones, and all size types of mechanisms can be figured by spatial coordinates. It is the foundation for research on the relations between the link dimensions and kinematic capability parameters.Aimed at the different characteristics of crank-rocker mechanism, double-crank mechanism, double-rocker mechanism and single-slider mechanism, some inherent relations between the link dimensions and the kinematic capability parameters are deeply analyzed, then the relative kinematic capability diagrams are obtained.Based on deeply analysis of inherent relations between the extreme position angle and the link dimensions of typeⅠand typeⅡcrank-rocker mechanisms with quick return characteristics, the geometrical conditions are put forward in this paper, by which we can judge whether the extreme position angle of typeⅠcrank-rocker mechanisms is less than, equal to or lager than 90°. It is proved that the extreme position angle of typeⅡcrank-rocker mechanism is certainly less than 90°. The relations between the extreme position angle and the angular stroke of the rocker are brought to light, which should be satisfied during the kinematic design of crank-rocker mechanisms.The diagrams and conclusions obtained in this paper provide theoretic foundation for the capability analysis and synthesis of mechanisms.Keyword:Planar four-bar linkage Space model Sports Performance如需源程序联系扣扣 194535455目录1 序言1.1 连杆机构 (1)1.2 平面连杆机构运动学分析 (2)1.3 本论文所作的主要工作 (3)2 平面四连杆机构的类型2.1 分类概念 (3)2.2 分类 (4)3 平面四杆机构运动分析3.1.1 连杆上任意点的轨迹分析 (6)3.1.2 Non-grashof机构的运动分析 (8)3.2 速度分析 (9)3.3 加速度分析 (10)4 平面连杆机构曲线分类基准及分类4.1 曲率 (11)4.2 弧长 (12)4.3 回转数 (12)4.4 结点 (13)4.5 变曲点、曲率极大点与极小点 (19)4.6 机构数据库的建立 (20)4.7 连杆曲线的分类结果 (20)5 平面连杆机构的仿真设计5.1 初始运行界面及程序 (23)5.2 部分仿真结果 (42)结论 (49)参考文献 (51)致谢 (52)1 序言连杆机构,是由许多刚性构件通过低副联结而成,也称低副机构。
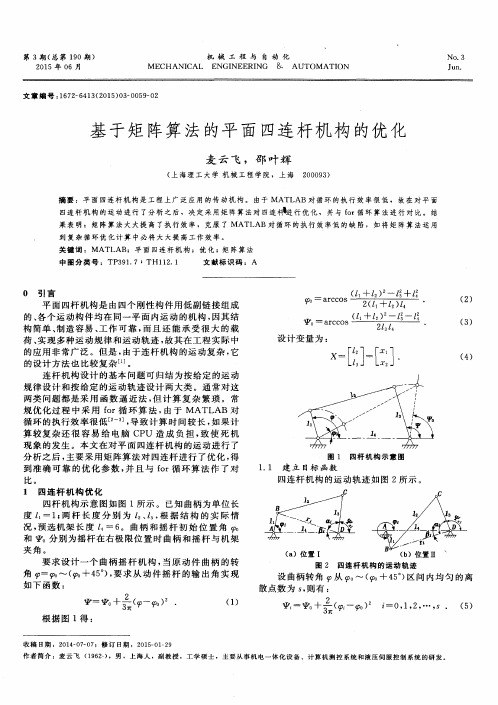
MATLAB 编写的程序来分析优化结果. 1 模糊优化设计的数学模型设计一曲柄摇杆机构,其机构运动简图如图 1所示要求曲柄 L 1 从θ0 转到θi =θ0 + 90°时,摇杆L 3 的输出角满足函数关系:φi =φ0 + 2(θi - θ0 )2 /(3π) ,θ0 和φ0 分别对应于摇杆在右极限位置时的曲柄和摇杆的位置角,其允许传动角γmin ≥45°. 1.1 选取设计变量由文献[1]知 ,平面四杆机构按主、从动的角度对应关系进行设计时 ,独立参数有 5 个:3根杆长和主、从动件的输入输出起始位置角.取主动件长度 L 1 =1 ,机架长度L 4=5 由图 1 可得如下关系式:θ0=arccos[)(2)(2142324221L L L L L L L +-++]φ0=arccos[4323242212)(L L L L L L --+]式中:L 1 、L 4 已知,只有 L 2 、L 3 为独立的变量故设计计变量为 L 2 和 L 3 . 1.2 确定目标函数由设计变量的分析可知 ,对于本问题只涉及到两个独立参数 ,因此仅仅利用平面四杆机构一般化设计只能近似地实现给定的运动规律 ,故目标函数可根据已知的运动规律和实际运动规律之间偏差的最小为目标来建立,表达式为f ( x) =∑(φi - φni )2式中:φi 为摇杆 L 3 的期望输出角,φni 为实际输出角,且 φni ={ii iiβαπβαπ+---)2()0(πθππθ≤<≤<i iαi = arccos[3232222RL L L R +-]βi = arccos[4242122RL L L R +-]R 2= 21L + 24L -2 L 1 L 4cos θi1.3 建立模糊优化约束条件。
模糊约束分为性能约束和几何约束[2].性能约束应考虑设计水平、制造水平、使用条件等因素的影响;几何约束主要是考虑边界的模糊性.因此各设计变量的模糊性应该建立如下约束条件[2]: 1) 机构传动角约束条件:为保证机构传动良好45°≤γ≤135°机构最小压力角产生于曲柄和机架共线时,些时满足条件:arcos[3223241222)(L L L L L L ++-]≥[γ]min机构最大压力角产生于曲柄和机架重合时,此时满足条件:arcos[3223241222)(L L L L L L ++-]≤[γ]min2) 杆长约束条件:L 2 ≥0 L 3 ≥0 3) 曲柄存在条件:L 1 + L 2 - L 3 - L 4 ≤0 L 1 + L 3 - L 2 - L 4 ≤0 L 1 + L 4 - L 2 - L 3 ≤02 模糊约束隶属函数的选择隶属函数是模糊集理论应用于实际的基石 ,对于具体的模糊性对象 ,只有写出切合实际的隶属函数 ,才能应用模糊学方法做具体的定量分析.对于四杆机构的设计变量边界取其模糊性 ,并依据约束条件采用斜线型隶属函数[3 ,4] :μσ={11-----σσσσυυ 其他情况---≤≤≤u σσσσσ 11式中:u -σ 、1-σ为过渡区间的上、下界 ,采用扩增系数法确定.3模糊约束的非模糊化处理针对上述数学模型按非对称模糊优化问题处理 ,综合考虑设计水平、制造水平、材料好坏、工作条件和重要程度这五个因素 ,采用二级模糊综合评判法[5] ,按最大隶属度原则求出最优水平截集λ* ,将非对称模糊优化问题转化为最优水平截集上的普通优化问题[6] 1) 建立因素集以及因素等级 ,见表 1. 令各因素下的等级权重集为 W 1 = (0.45,0.25,0.20,0.10) W 2 = (0.50,0.40,0.10,0.00) W 3 = (0.30,0.40,0.20,0.10) W 4 = (0.40,0.40,0.10,0.10) W 5 = (0.30,0.50,0.10,0.10) 则综合评判矩阵为R = [W1 ,W2 ,W3 ,W4 ,W5 ] T2)确定五个因素权重集W = (0.30,0. 20,0. 20,0.20,0. 10)3) 进行一级模糊综合评判.由模糊矩阵乘法规则变换得到模糊综合评价集B= W ·R,其中R 为综合评判矩阵.选择模型M( ∧, ∨)进行一级模糊评判得到B1= (0.30,0.25,0. 20,0.10) .选择模型M( ·, +)进行一级模糊评判得到B2= (0.405,0.365,0. 150,0.080) .选择模型M(乘幂, ∧)进行一级模糊评判得到B3 = (0.786,0. 660,0.617,0) .选择模型M( ∧,)进行一级模糊评判得到B4= (1.00,0.95,0. 70,0.40) .4) 进行二级模糊评判设二级评判指标集为U0 = { B1 ,B2 ,B3 ,B4 } ,各个指标权重分配为A0 = (0. 2 ,0.3 ,0. 3,0.2) ,二级综合评判矩阵为R0 = [B1 ,B2 ,B3,B4 ] T ,根据加权平均模型M( ·, +)得到二级模糊综合评价集为B= A0·R0 = (0.617 ,0.548 ,0.410 ,0.124) ,所以由最大隶属度原则得到最优水平截集λ* =0.617.4 非模糊优化问题的求解及其分析λ* 的值作为模糊约束的最优水平截集,将非对称模糊优化问题转化为常规非线性约束化问题[7] ,可以利用MATLAB 优化工具箱中的fmincon函数来求解[7 ,8] .目标函数M 文件myfun. m 和my2con. m 内容如下:function f = myfun(x)f =0a0 =acos(((1 + x(1)) ^2 - x(2) ^2 + 25)/ (10* (1 +x(1))))b0 =acos(((1 + x (1)) ^2 - x (2) ^2 - 25)/ (10* x(2)))for a= a0:pi/ 18:(a0 +1.570 7)b= b0 +2 3 (a- a0)^2/ (3 3pi)r= sqrt(26 – 10*cos(a))m =acos((r^2 + x(2) ^2 - x(1) ^2)/ (2* r * x(2)))n=acos((r^2 +24)/ (10*r))bb=pi - m - ni = (bb- b) ^2f = f + iendfunction [c,ceq] = mycon(x)c= [ x(1) ^2 + x(2) ^2 - 1.414* x(1)* x(2) - 16;36- x(1) ^2 - x(2) ^2 - 1.414 * x(1)* x(2) ];ceq= [ ]然后在MA TLAB 的command window 窗口中键入如下程序:format long;x0 = [6 ,5];A = [ - 1 - 1;1 - 1; - 1 1];b= [ - 6;4;4];lb=zeros(2 ,1) ;options =optimset‘( largescale’‘, off’) ;[ x ,fval] = fmincon( @myfun , x0 ,A , b,[ ] ,[ ] ,lb,[ ] , @mycon ,options)运行后,得到结果:x =5.650 631 235 437 21,4.169 692 585 518 78fval =0.051 092 590 198 11因此目标函数的值 f ( x) = 0. 051 1. 若利用传统的惩罚函数法得到优化结果为f ( x) = 0. 058[9] ,模糊优化与常规优化比较,目标函数的值减少了11.89 %,即已知运动轨迹和实际机构的运动轨迹之间偏差的平方和减小了11.89 %,大大提高了设计精度.5 结论由于模糊设计综合考虑了影响机构设计的各种模糊因素,因此更接近于客观实际.从模糊优化结果上可以看出,采用模糊优化设计使已知运动轨迹和实际机构的运动轨迹之间偏差的平方和减少了11.89 %,充分体现了模糊集理论优化设计的优越性,效果明显.参考文献:[1] 郑文纬,吴克坚.机械原理[M].北京:高等教育出版社,2002:67- 103.[2] 黄洪钟.非对称模糊优化设计的基本理论及其方法[J ]. 机械设计,1997 ,14(2) :40-45.[3] 陈水利,李敬功. 模糊2集理论及其应用[M]. 北京:科学出版社,2005:702-132.[4] 王坚强.动态多指标系统增长决策问题研究[J ].系统工程与电子技术,1999,21(7):27 -29.[5] 战仁军.摩擦学设计综合评价模型的研究[J ].机械工程学报,1997 ,33(3) :142-20.[6] 席平原.基于MA TLAB 的机械优化设计问题分析[J].煤矿机械,2003 ,24(9) :30-33.[7] 王的睿,郭卫. 用MATLAB 优化工具箱求解机械最优化问题[J].械,2000,21(7):6- 8.[8] ZADEH L A. Fuzzy sets [J ]. Information and Control ,1965 ,8(6) :338-353.[9] 刘惟信.机2械最优化设计[M].北京:清华大学出版社,1994.。