学习笔记-最小均方(LMS)自适应滤波
- 格式:docx
- 大小:109.07 KB
- 文档页数:3
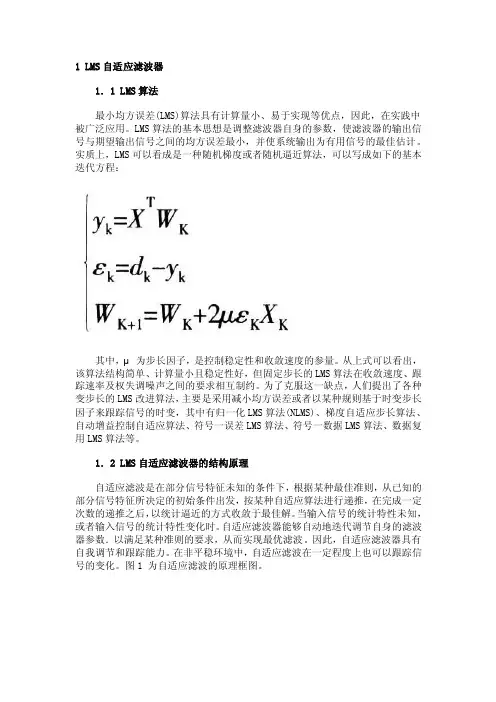
1 LMS自适应滤波器1.1 LMS算法最小均方误差(LMS)算法具有计算量小、易于实现等优点,因此,在实践中被广泛应用。
LMS算法的基本思想是调整滤波器自身的参数,使滤波器的输出信号与期望输出信号之间的均方误差最小,并使系统输出为有用信号的最佳估计。
实质上,LMS可以看成是一种随机梯度或者随机逼近算法,可以写成如下的基本迭代方程:其中,μ为步长因子,是控制稳定性和收敛速度的参量。
从上式可以看出,该算法结构简单、计算量小且稳定性好,但固定步长的LMS算法在收敛速度、跟踪速率及权失调噪声之间的要求相互制约。
为了克服这一缺点,人们提出了各种变步长的LMS改进算法,主要是采用减小均方误差或者以某种规则基于时变步长因子来跟踪信号的时变,其中有归一化LMS算法(NLMS)、梯度自适应步长算法、自动增益控制自适应算法、符号一误差LMS算法、符号一数据LMS算法、数据复用LMS算法等。
1.2 LMS自适应滤波器的结构原理自适应滤波是在部分信号特征未知的条件下,根据某种最佳准则,从已知的部分信号特征所决定的初始条件出发,按某种自适应算法进行递推,在完成一定次数的递推之后,以统计逼近的方式收敛于最佳解。
当输入信号的统计特性未知,或者输入信号的统计特性变化时。
自适应滤波器能够自动地迭代调节自身的滤波器参数.以满足某种准则的要求,从而实现最优滤波。
因此,自适应滤波器具有自我调节和跟踪能力。
在非平稳环境中,自适应滤波在一定程度上也可以跟踪信号的变化。
图1 为自适应滤波的原理框图。
2 LMS滤波器的仿真与实现2.1 LMS算法参数分析传统的LMS算法是最先由统计分析法导出的一种实用算法.它是自适应滤波器的基础。
通过Matlab仿真对LMS算法中各参数的研究,总结出其对算法的影响。
现针对时域LMS算法的各参数进行一些讨论。
(1)步长步长μ是表征迭代快慢的物理量。
由LMS算法可知:该量越大,自适应时间μ越小,自适应过程越快,但它引起的失调也越大,当其大于1/λmax时,系统发散;而该值越小,系统越稳定,失调越小,但自适应过程也相应加长。
基于LMS算法的自适应滤波器设计自适应滤波器是信号处理中常用的一种技术,可以根据输入信号的统计特性来调整滤波器参数,以实现信号的去噪、谱线增强等功能。
LMS (Least Mean Square,最小均方误差)算法是自适应滤波器中最常用的一种算法,它通过调整滤波器的权值,使得滤波器的输出信号与期望输出信号之间的均方误差最小。
本文将详细介绍基于LMS算法的自适应滤波器设计。
首先,我们先来了解LMS算法的原理。
LMS算法的核心思想是通过不断迭代调整滤波器的权值,使得滤波器的输出信号最小化与期望输出信号之间的均方误差。
算法的迭代过程如下:1.初始化滤波器权值向量w(0)为0;2.对于每个输入信号样本x(n),计算滤波器的输出信号y(n);3.计算实际输出信号y(n)与期望输出信号d(n)之间的误差e(n);4.根据误差信号e(n)和输入信号x(n)来更新滤波器的权值向量w(n+1);5.重复步骤2-4,直到满足停止条件。
在LMS算法中,滤波器的权值更新公式为:w(n+1)=w(n)+μ*e(n)*x(n)其中,w(n+1)为更新后的权值向量,w(n)为当前的权值向量,μ为步长参数(控制权值的调整速度),e(n)为误差信号,x(n)为输入信号。
1.确定输入信号和期望输出信号的样本数量,以及步长参数μ的值;2.初始化滤波器的权值向量w(0)为0;3.依次处理输入信号样本,在每个样本上计算滤波器的输出信号y(n),并计算出误差信号e(n);4.根据误差信号e(n)和输入信号x(n)来更新滤波器的权值向量w(n+1);5.重复步骤3-4,直到处理完所有的输入信号样本;6.得到最终的滤波器权值向量w,即为自适应滤波器的设计结果。
在实际应用中,自适应滤波器设计的性能往往与步长参数μ的选择密切相关。
较小的步长参数会使得权值更新速度过慢,容易出现收敛慢的问题;而较大的步长参数可能导致权值在稳定后开始震荡,使得滤波器的性能下降。
使用LMS算法设计FIR自适应滤波器自适应滤波器是统计信号处理的一个重要组成部分。
在实际应用中,由于没有充足的信息来设计固定系数的数字滤波器,或者设计规则会在滤波器正常运行时改变,因此我们需要研究自适应滤波器。
凡是需要处理未知统计环境下运算结果所产生的信号或需要处理非平稳信号时,自适应滤波器可以提供一种吸引人的解决方法,而且其性能通常远优于用常方法设计的固定滤波器。
此外,自适应滤波器还能提供非自适应方法所不可能提供的新的信号处理能力。
通过《现代信号处理》这门课程的学习,掌握了自适应滤波器的基本理论、算法及设计方法。
本文中对最小均方误差(LMS)算法进行了认真的回顾,最终采用改进的LMS 算法设计FIR结构自适应滤波器,并采用MATLAB进行仿真。
一、自适应滤波器理论基础1、基本概念凡是有能力进行信号处理的装置都可以称为滤波器。
在近代电信装备和各类控制系统中,滤波器应用极为广泛;在所有的电子部件中,使用最多,技术最复杂要算滤波器了。
滤波器的优劣直接决定产品的优劣,所以,对滤波器的研究和生产历来为各国所重视。
滤波器是一种用来消除干扰杂讯的器件,将输入或输出经过过滤而得到纯净的交流电。
您可以通过基本的滤波器积木块——二阶通用滤波器传递函数,推导出最通用的滤波器类型:低通、带通、高通、陷波和椭圆型滤波器。
传递函数的参数——f0、d、hHP、hBP 和hLP,可用来构造所有类型的滤波器。
转降频率f0为s项开始占支配作用时的频率。
设计者将低于此值的频率看作是低频,而将高于此值的频率看作是高频,并将在此值附近的频率看作是带内频率。
阻尼d用于测量滤波器如何从低频率转变至高频率,它是滤波器趋向振荡的一个指标,实际阻尼值从0至2变化。
高通系数hHP是对那些高于转降频率的频率起支配作用的分子的系数。
带通系数hBP是对那些在转降频率附近的频率起支配作用的分子的系数。
低通系数hLP是对那些低于转降频率的频率起支配作用1的分子的系数。
数字信号处理中的自适应滤波算法自适应滤波算法在数字信号处理领域中扮演着重要的角色。
它们能够自动地根据输入信号的特性调整滤波器参数,以达到最佳的滤波效果。
本文将介绍几种常见的自适应滤波算法及其应用。
一、最小均方(LMS)算法最小均方(Least Mean Square, LMS)算法是最简单、常用的自适应滤波算法之一。
它的基本思想是通过最小化预测误差的均方差来更新滤波器参数。
LMS算法的原理如下:1. 初始化滤波器系数向量w和适当的步长参数μ。
2. 对于每个输入信号样本x(n),计算滤波器输出y(n)。
3. 计算预测误差e(n) = d(n) - y(n),其中d(n)是期望输出。
4. 更新滤波器系数向量w(n+1) = w(n) + 2μe(n)x(n)。
5. 重复步骤2至4,直到达到收敛条件。
LMS算法的优点是实现简单,适用于多种信号处理问题。
然而,它对信号的统计特性敏感,收敛速度较慢。
二、最小均方归一化(NLMS)算法最小均方归一化(Normalized Least Mean Square, NLMS)算法是对LMS算法的改进,可以有效地解决LMS算法中的收敛速度慢的问题。
NLMS算法的主要改变是利用输入信号的能量对步长参数进行归一化。
其具体步骤如下:1. 初始化滤波器系数向量w和适当的步长参数μ。
2. 对于每个输入信号样本x(n),计算滤波器输出y(n)。
3. 计算预测误差e(n) = d(n) - y(n)。
4. 计算输入信号能量ρ(n) = x(n)·x(n)。
5. 更新滤波器系数向量w(n+1) = w(n) + (2μ/ρ(n))e(n)x(n)。
6. 重复步骤2至5,直到达到收敛条件。
NLMS算法通过对步长参数进行归一化,使其与输入信号能量相关联。
这样一来,相对于LMS算法,它能够更快地收敛。
三、迫零(RLS)算法迫零(Recursive Least Squares, RLS)算法是一种递归算法,也是自适应滤波算法中最常用的一种。
LMS自适应滤波器是使滤波器的输出信号与期望响应之间的误差的均方值为最小,因此称为最小均方(LMS)自适应滤波器。
function [yn,W,en]=LMS(xn,dn,M,mu,itr)% LMS(Least Mean Squre)算法%输入参数:% xn 输入的信号序列(列向量)% dn 所期望的响应序列 (列向量)% M 滤波器的阶数(标量)% mu 收敛因子(步长) (标量)要求大于0,小于xn的相关矩阵最大特征值的倒数% itr 迭代次数 (标量) 默认为xn的长度,M<itr<length(xn)% 输出参数:% W 滤波器的权值矩阵 (矩阵)% 大小为M x itr,% en 误差序列(itr x 1)(列向量)% yn 实际输出序列(列向量)%参数个数必须为4个或5个if nargin == 4 % 4个时递归迭代的次数为xn的长度itr = length(xn);elseif nargin == 5 % 5个时满足M〈itr〈length(xn)if itr〉length(xn) | itr〈Merror(’迭代次数过大或过小!');endelseerror(’请检查输入参数的个数!’);end%初始化参数en = zeros(itr,1);%误差序列,en(k)表示第k次迭代时预期输出与实际输入的误差W = zeros(M,itr); % 每一行代表一个加权参量,每一列代表-次迭代,初始为0%迭代计算for k = M:itr % 第k次迭代x = xn(k:—1:k-M+1);%滤波器M个抽头的输入 y = W(:,k-1).' * x;%滤波器的输出en(k) = dn(k)— y ; % 第k次迭代的误差% 滤波器权值计算的迭代式W(:,k) = W(:,k—1) + 2*mu*en(k)*x;end% 求最优时滤波器的输出序列yn = inf * ones(size(xn));for k = M:length(xn)x = xn(k:—1:k—M+1);yn(k) = W(:,end)。
最小均方算法(lms)的原理
最小均方算法(LMS)是一种用于信号处理和自适应滤波的算法,它是一种迭代算法,
用于最小化预测误差的均方值。
在该算法中,滤波器的系数会根据输入信号实时地调整,
以使得滤波器的输出能够尽可能地接近期望输出。
LMS算法的核心理念是通过不断迭代,不断的调整滤波器的系数,使其能够最大限度
地降低误差。
该算法首先需要确定一组初始系数,并计算出当前的滤波器输出以及误差。
然后,根据误差的大小和方向来调整滤波器的系数,并重复这个过程,直到误差的均方值
达到最小。
这个过程的数学原理可以用一个简单的公式来表示:
w(n+1) = w(n) + µe(n)X(n)
其中, w(n)是当前滤波器的系数,µ是一个可调节的步长参数,e(n)是当前的误差,
X(n)是输入数据的向量。
在该算法中,步长参数µ的大小对LMS算法的性能有重要的影响。
如果其选择过大,
会导致算法不稳定,收敛到一个错误的值;而如果µ的值过小,则算法收敛速度慢。
此外,在使用LMS算法时,还需要进行一些预处理。
比如,在对输入信号进行滤波时,通常需要进行预加重处理,以便在高频段上增强信号的弱化部分。
同时,在为滤波器确定
初始系数时,还需要利用一些特定的算法来进行优化,以使得滤波器的性能能够得到进一
步的提升。
lms自适应滤波器原理LMS自适应滤波器原理引言:LMS(Least Mean Square)自适应滤波器是一种常用的数字信号处理技术,它被广泛应用于自适应滤波、信号降噪、通信系统和控制系统等领域。
本文将介绍LMS自适应滤波器的原理及其应用。
一、LMS自适应滤波器简介LMS自适应滤波器是一种基于最小均方(Least Mean Square)误差准则的自适应滤波器。
其基本原理是通过不断调整滤波器的权值,使得输出信号尽可能接近期望输出信号,从而达到滤波的目的。
LMS算法是一种迭代算法,通过不断更新滤波器的权值,逐步逼近最优解。
二、LMS自适应滤波器的工作原理1. 输入信号与滤波器权值的乘积LMS自适应滤波器的输入信号经过滤波器产生的输出信号,与期望输出信号进行比较,得到误差信号。
误差信号与滤波器权值的乘积,即为滤波器的输出。
2. 更新滤波器权值LMS算法通过不断更新滤波器的权值,使得滤波器的输出逐步接近期望输出。
权值的更新是根据误差信号和输入信号的乘积,以及一个自适应因子进行的。
自适应因子的选择对算法的收敛速度和稳定性有重要影响。
3. 收敛判据LMS自适应滤波器的收敛判据是通过计算滤波器的平均误差来判断滤波器是否已经达到稳态。
当滤波器的平均误差小于一定阈值时,认为滤波器已经收敛。
三、LMS自适应滤波器的应用LMS自适应滤波器广泛应用于信号降噪、通信系统和控制系统等领域。
1. 信号降噪LMS自适应滤波器可以通过不断调整滤波器的权值,将噪声信号从输入信号中滤除,从而实现信号的降噪处理。
在语音信号处理、图像处理等领域有着重要的应用。
2. 通信系统LMS自适应滤波器可以用于通信系统中的均衡处理。
在通信信道中,由于传输过程中的噪声和失真等因素,信号会发生失真和衰减。
LMS自适应滤波器可以通过适当调整滤波器的权值,实现信号的均衡,提高通信系统的性能。
3. 控制系统LMS自适应滤波器在控制系统中常用于系统辨识和自适应控制。

LMS自适应滤波算法1960年Widrow和Hoff提出最小均方误差算法(LMS),LMS算法是随机梯度算法中的一员。
使用“随机梯度”一词是为了将LMS算法与最速下降法区别开来。
该算法在随机输入维纳滤波器递归计算中使用确定性梯度。
LMS算法的一个显著特点是它的简单性。
此外,它不需要计算有关的相关函数,也不需要矩阵求逆运算。
由于其具有的简单性、鲁棒性和易于实现的性能,在很多领域得到了广泛的应用。
1LMS算法简介LMS算法是线性自适应滤波算法,一般来说包含两个基本过程:(1)滤波过程:计算线性滤波器输出对输入信号的响应,通过比较输出与期望响应产生估计误差。
(2)自适应过程:根据估计误差自动调整滤波器参数。
如图1-1所示,用表示n时刻输入信号矢量,用表示n时刻N阶自适应滤波器的权重系数,表示期望信号,表示误差信号,是主端输入干扰信号,u是步长因子。
则基本的LMS算法可以表示为(1)(2)图1-1 自适应滤波原理框图由上式可以看出LMS算法实现起来确实很简单,一步估计误差(1),和一步跟新权向量(2)。
2迭代步长u的作用2.1 理论分析尽管LMS算法实现起来较为简单,但是精确分析LMS的收敛过程和性能却是非常困难的。
最早做LMS收敛性能分析的是Widrow等人,他们从精确的梯度下降法出发,研究权矢量误差的均值收敛特性。
最终得到代价函数的收敛公式:′(3)式(3)揭示出LMS算法代价函数的收敛过程表现为一簇指数衰减曲线之和的形式,每条指数曲线对应于旋转后的权误差矢量的每个分量,而他们的衰减速度,对应于输入自相关矩阵的每个特征值,第i条指数曲线的时间常数表示为τ小特征值对应大时间常数,即衰减速度慢的曲线。
而大特征值对应收敛速度快的曲线,但是如果特征值过大以至于则导致算法发散。
从上式可以明显看出迭代步长u在LMS算法中会影响算法收敛的速度,增大u可以加快算法的收敛速度,但是要保证算法收敛。
最大步长边界:稳态误差时衡量LMS算法的另一个重要指标,稳定的LMS算法在n时刻所产生的均方误差,其最终值∞是一个常数。
RLS 和LMS 自适应算法分析摘要:本文主要介绍了自适应滤波的两种算法:最小均方(LMS, Least Mean Squares)和递推最小二乘(RLS, Recursive Least Squares)两种基本自适应算法。
我们对这两种基本的算法进行了原理介绍,并进行了Matlab 仿真。
通过仿真结果,我们对两种自适应算法进行了性能分析,并对其进行了比较。
用Matlab 求出了LMS 自适应算法的权系数,及其学习过程曲线,和RLS 自适应权系数算法的学习过程。
关键词:自适应滤波、LMS 、RLS 、Matlab 仿真Abstract: this article mainly introduces two kinds of adaptive filtering algorithms: Least Mean square (LMS), further Mean Squares) and Recursive Least Squares (RLS, Recursive further Squares) two basic adaptive algorithm. Our algorithms of these two basic principle is introduced, and Matlab simulation. Through the simulation results, we have two kinds of adaptive algorithm performance analysis, and carries on the comparison. Matlab calculate the weight coefficient of the LMS adaptive algorithm, and its learning curve, and the RLS adaptive weight coefficient algorithm of the learning process.Keywords:, LMS and RLS adaptive filter, the Matlab simulation课题简介:零均值、单位方差的白噪声通过一个二阶自回归模型产生的AR 过程。
⾃适应滤波:最⼩均⽅误差滤波器(LMS、NLMS)作者:桂。
时间:2017-04-02 08:08:31链接:声明:欢迎被转载,不过记得注明出处哦~【读书笔记08】前⾔西蒙.赫⾦的《⾃适应滤波器原理》第四版第五、六章:最⼩均⽅⾃适应滤波器(LMS,Least Mean Square)以及归⼀化最⼩均⽅⾃适应滤波器(NLMS,Normalized Least Mean Square)。
全⽂包括: 1)LMS与维纳滤波器(Wiener Filter)的区别; 2)LMS原理及推导; 3)NLMS推导; 4)应⽤实例;内容为⾃⼰的读书记录,其中错误之处,还请各位帮忙指出!⼀、LMS与维纳滤波器(Wiener Filter)的区别这⾥介绍的LMS/NLMS,通常逐点处理,对应思路是:随机梯度下降;对于Wiener Filter,给定准则函数J,随机/批量梯度都可以得出最优解;LMS虽然基于梯度下降,但准则仅仅是统计意义且通常引⼊误差,可以定义为J_0,简⽽⾔之J通常不等于J_0,得出的最优解w_o⾃然也通常不等于维纳最优解;分析LMS通常会分析稳定性,稳定性是基于Wiener解,。
但LMS是Wiener解的近似,所以:迭代步长的稳定性,严格适⽤于Wiener 解,对于LMS只是⼀种近似参考,并没有充分的理论依据。
下⽂的分析仍然随机梯度下降的思路进⾏。
⼆、LMS原理及推导LMS是时间换空间的应⽤,如果迭代步长过⼤,仍然有不收敛的问题;如果迭代步长过⼩,对于不平稳信号,还没有实现寻优就⼜引⼊了新的误差,屋漏偏逢连夜⾬!所以LMS系统是脆弱的,信号尽量平稳、哪怕短时平稳也凑合呢。
给出框图:关于随机梯度下降,可以。
这⾥直接给出定义式:利⽤梯度下降:- \nabla J = {\bf{x}}{\left( {{{\bf{w}}^T}{\bf{x}} - {d}} \right)^T}给出LMS算法步骤:1)给定\bf{w}(0),且1<\mu<1/\lambda_{max};2)计算输出值:y\left( k \right) = {\bf{w}}{\left( k \right)^T}{\bf{x}}\left( k \right);3)计算估计误差:e\left( k \right) = d\left( k \right) - y\left( k \right);4)权重更新:{\bf{w}}\left( {k + 1} \right) = {\bf{w}}\left( k \right) + \mu e\left( k \right){\bf{x}}\left( k \right)三、NLMS推导看到Normalized,与之联系的通常是约束条件,看到约束不免想起拉格朗⽇乘⼦。
lms算法自适应滤波器应用于自适应回声消除matlab基本步骤1.引言1.1 概述LMS算法自适应滤波器应用于自适应回声消除是一种有效的信号处理技术。
在通信系统、音频处理等领域,回声是一个常见的问题,它会导致信号质量下降和通信效果的恶化。
为了解决这个问题,自适应滤波器和LMS算法被广泛采用。
本文旨在介绍LMS算法自适应滤波器在自适应回声消除中的应用,并详细讲解其基本步骤。
首先,我们将对LMS算法和自适应滤波器进行介绍,包括其原理和基本概念。
然后,我们将探讨自适应回声消除的原理,并介绍LMS算法在回声消除中的具体应用。
通过研究本文,读者将了解到LMS算法自适应滤波器的基本原理和应用场景,以及如何利用该算法实现回声消除。
此外,我们还将对LMS算法自适应滤波器的性能进行分析和评价。
最后,我们将对本文进行总结,并展望其在未来的研究和应用中的发展前景。
通过本文的介绍,读者将具备一定的理论基础和实践经验,能够应用LMS算法自适应滤波器解决实际问题,提高信号处理的效果,从而为通信系统和音频处理领域的发展做出贡献。
文章结构部分应该包括对整篇文章的章节和内容进行简要介绍和概述。
以下是文章1.2文章结构部分的一个例子:1.2 文章结构本文主要介绍了LMS算法自适应滤波器在自适应回声消除中的应用,文章共分为以下几个部分:2. 正文2.1 LMS算法在本节中,我们将详细介绍LMS算法的原理和步骤。
我们将解释LMS算法是如何通过迭代过程来逼近系统的输入和输出之间的关系,从而实现滤波器的自适应调整。
2.2 自适应滤波器本节将重点介绍自适应滤波器的原理。
我们将分析自适应滤波器是如何通过反馈机制和参数调整来实现信号滤波的自适应性。
并探讨了自适应滤波器在实际应用中的一些典型场景。
2.3 自适应回声消除在本节中,我们将详细讨论回声消除的原理和技术。
我们将解释回声是如何产生的以及对通信信号产生的影响。
并介绍LMS算法在回声消除中的应用,以解决回声干扰带来的问题。
自适应滤波LMS算法及RLS算法及其仿真1.引言2.自适应滤波LMS算法LMS(Least Mean Square)算法是一种最小均方误差准则的自适应滤波算法。
其基本原理是通过不断调整滤波器的权值,使得输出信号的均方误差最小化。
LMS算法的迭代公式可以表示为:w(n+1)=w(n)+μ*e(n)*x(n)其中,w(n)为滤波器的权值向量,μ为步长因子,e(n)为误差信号,x(n)为输入信号。
通过迭代更新权值,LMS算法逐渐收敛,实现了自适应滤波。
3.RLS算法RLS(Recursive Least Square)算法是一种递归最小二乘法的自适应滤波算法。
相比于LMS算法,RLS算法具有更好的收敛性能和适应性。
RLS算法基于最小二乘准则,通过递归式地计算滤波器权值矩阵,不断优化滤波器的性能。
迭代公式可以表示为:P(n)=(P(n-1)-P(n-1)*x(n)*x(n)'*P(n-1)/(λ+x(n)'*P(n-1)*x(n))) K(n)=P(n)*x(n)/(λ+x(n)'*P(n)*x(n))w(n+1)=w(n)+K(n)*e(n)其中,P(n)为滤波器的协方差矩阵,K(n)为最优权值,λ为遗忘因子(用于控制算法的收敛速度),e(n)为误差信号。
4.仿真实验为了验证LMS算法和RLS算法的性能,我们进行了一组仿真实验。
假设输入信号为一个正弦信号,噪声为高斯白噪声。
我们分别使用LMS和RLS算法对输入信号进行自适应滤波,比较其输出信号和原始信号的均方误差。
在仿真中,我们设置了相同的滤波器长度和步长因子,比较LMS和RLS算法的收敛速度和输出质量。
实验结果表明,相对于LMS算法,RLS 算法在相同条件下具有更快的收敛速度和更低的均方误差。
这验证了RLS 算法在自适应滤波中的优越性。
5.结论本文介绍了自适应滤波LMS算法和RLS算法的原理及其在仿真中的应用。
实验结果表明,相对于LMS算法,RLS算法具有更好的收敛性能和适应性。
lms 自适应滤波算法在mvdr 波束形成中的运用概述说明1. 引言1.1 概述本文旨在探讨LMS自适应滤波算法在MVDR波束形成中的运用。
随着科技的飞速发展,无线通信系统越来越普及和重要,而波束形成技术作为一种提高通信性能和降低干扰的关键技术,在无线通信领域得到了广泛应用。
LMS自适应滤波算法是一种经典且常用的自适应滤波方法,具有快速收敛和较好的稳定性等优势。
本文将分析LMS自适应滤波算法的原理、工作原理以及特点与优势,然后探究MVDR波束形成技术的基本原理、算法流程以及应用场景。
最后将重点研究LMS自适应滤波算法在MVDR波束形成中的运用,并进行实验结果与讨论。
1.2 文章结构文章结构如下所示:首先引言部分对本文进行概述说明;之后,第二部分将详细介绍LMS自适应滤波算法的原理、工作原理以及特点与优势;第三部分将介绍MVDR波束形成技术的基本原理、算法流程以及应用场景;第四部分将重点探究LMS自适应滤波算法在MVDR波束形成中的运用,包括研究背景、算法设计与分析以及实验结果与讨论;最后,第五部分将给出结论和展望,总结研究成果,并对未来研究方向进行展望。
1.3 目的本文的目的是通过概述说明LMS自适应滤波算法在MVDR波束形成中的运用。
旨在深入了解LMS自适应滤波算法的原理和特点,并探讨其在MVDR波束形成中的优势和适用性。
通过分析实验结果和讨论,掌握LMS自适应滤波算法在MVDR波束形成中的性能表现,为无线通信系统设计和优化提供参考依据。
最终目标是推动无线通信技术的发展,提高通信质量和系统性能。
2. LMS自适应滤波算法2.1 原理介绍LMS自适应滤波算法是一种常见的自适应信号处理方法。
它基于最小均方误差准则,通过不断调整滤波器系数,使得滤波后的输出信号与期望信号之间的均方误差最小化。
该算法可以有效地抑制干扰和噪声,并提高系统性能。
在LMS算法中,假设输入信号为x(n),期望输出为d(n),滤波器的系数为w(n)。
LMS自适应滤波算法1960年Widrow和Hoff提出最小均方误差算法(LMS),LMS算法是随机梯度算法中的一员。
使用“随机梯度”一词是为了将LMS算法与最速下降法区别开来。
该算法在随机输入维纳滤波器递归计算中使用确定性梯度。
LMS算法的一个显著特点是它的简单性。
此外,它不需要计算有关的相关函数,也不需要矩阵求逆运算。
由于其具有的简单性、鲁棒性和易于实现的性能,在很多领域得到了广泛的应用。
1LMS算法简介LMS算法是线性自适应滤波算法,一般来说包含两个基本过程:(1)滤波过程:计算线性滤波器输出对输入信号的响应,通过比较输出与期望响应产生估计误差。
(2)自适应过程:根据估计误差自动调整滤波器参数。
如图1-1所示,用表示n时刻输入信号矢量,用表示n时刻N阶自适应滤波器的权重系数,表示期望信号,表示误差信号,是主端输入干扰信号,u是步长因子。
则基本的LMS算法可以表示为(1)(2)图1-1 自适应滤波原理框图由上式可以看出LMS算法实现起来确实很简单,一步估计误差(1),和一步跟新权向量(2)。
2迭代步长u的作用2.1 理论分析尽管LMS算法实现起来较为简单,但是精确分析LMS的收敛过程和性能却是非常困难的。
最早做LMS收敛性能分析的是Widrow等人,他们从精确的梯度下降法出发,研究权矢量误差的均值收敛特性。
最终得到代价函数的收敛公式:′(3)式(3)揭示出LMS算法代价函数的收敛过程表现为一簇指数衰减曲线之和的形式,每条指数曲线对应于旋转后的权误差矢量的每个分量,而他们的衰减速度,对应于输入自相关矩阵的每个特征值,第i条指数曲线的时间常数表示为τ小特征值对应大时间常数,即衰减速度慢的曲线。
而大特征值对应收敛速度快的曲线,但是如果特征值过大以至于则导致算法发散。
从上式可以明显看出迭代步长u在LMS算法中会影响算法收敛的速度,增大u可以加快算法的收敛速度,但是要保证算法收敛。
最大步长边界:稳态误差时衡量LMS算法的另一个重要指标,稳定的LMS算法在n时刻所产生的均方误差,其最终值∞是一个常数。
实验报告实验名称:基于LMS算法的自适应滤波实验报告实验名称:基于LMS算法的自适应滤波实验内容:最小均方算法即LMS是一种自适应滤波算法,这里的Matlab程序根据LMS对一个线性噪声系统进行滤波。
实验原理:最小均方算法是一种以期望响应和滤波器输出信号之间误差的均方值最小为原则,依据输入信号在迭代过程中估计梯度矢量,并更新权系数以达到最佳的自适应迭代算法。
实验程序:clear;clc;grid off;%周期信号的产生t=0:99;sn=10*sin(0.5*t);figure(1)subplot(2,1,1)plot(t,sn);title('原始的周期信号')grid on;%噪声信号的产生randn('state',sum(100*clock));noise=randn(1,100);subplot(2,1,2)plot(t,noise);title('噪声信号')grid on;%信号滤波xn=sn+noise;xn=xn.';dn=sn.';M=20;figure(2)subplot(2,1,1)plot(t,xn)title('加噪声后的信号波形')grid on;%初始化r_max=max(eig(xn*xn.'));mu=rand()/r_max;itr=length(xn);en=zeros(itr,1);w=zeros(M,itr);%LMSfor k=M:itrx=xn(k:-1:k-M+1);y=w(:,k-1).'*x;en(k)=dn(k)-y;%加权因子w(:,k)=w(:,k-1)+2*mu*en(k)*x;endyn=inf*ones(size(xn));for k=M:itrx=xn(k:-1:k-M+1);yn(k)=w(:,end).'*x;end%画图subplot(2,1,2)plot(t,yn)title('滤波器输出信号')grid on;figure(3)hold on;plot(t,dn,'g',t,yn,'b',t,dn-yn,'r'); grid on;legend('期望输出','滤波器输出','误差')实验结果仿真:实验总结:LMS算法是一种梯度最速下降算法,其显著特点是简单、计算量小、易于实现。
自适应滤波原理:
Lms– least mean square
自适应滤波是一套反馈控制系统,是指利用前一时刻的结果,自动调节当前时刻的滤波器参数,以适应信号和噪声未知或随机变化的特性,得到有效的输出,主要由参数可调的数字滤波器和自适应算法两部分组成,如图1所示
图1自适应滤波器原理图
∙首先假设输入信号是所要信号和干扰噪声之和
∙可变滤波器有有限脉冲响应结构,这样结构的脉冲响应等于滤波器系数。
阶滤波器的系数定义为
.
∙误差信号或者叫作代价函数,是所要信号与估计信号之差
可变滤波器通过将输入信号与脉冲响应作卷积估计所要信号,用向量表示
为
其中
是输入信号向量。
另外,可变滤波器每次都会马上改变滤波器系数
其中是滤波器系数的校正因子。
自适应算法根据输入信号与误差信号生成这个校正因子,根据修改矫正因子的方式不同可以区分为不同的自适应算法。
自适应滤波器的自适应过程是:用自适应算法(Update Algorithm)调节FIR或IIR滤波器的系数,使误差信号逼近于0。
疑问:在实际应用中如何获得d(n)期望输出信号?或者如何获得噪声信号?。
最小均方(LMS)自适应滤波
自适应滤波器实际上是一种能够自动调整本身参数的特殊维纳滤波器,在设计时不需要预先知道关于输入信号和噪声的统计特性,它能够在工作过程中逐步“了解”或估计出所需的统计特性,并以此为依据自动调整自身的参数,以达到最佳滤波效果
图 2.1 自适应滤波器的原理图
自适应滤波器的特性变化是由自适应算法通过调整可编程滤波器系数来实现的。
一般而言,自适应滤波器由可编程滤波器(滤波部分)和自适应算法(控制部分)两部分组成。
自适应滤波器可以构成自适应的噪声抵消器,它可以消除叠加在信号上的,在同一频段内的不相关的噪声。
自适应噪声抵消器模型,如图 2.2 所示。
图 2.2 自适应噪声抵消器模型
最小均方(LMS )算法是基于最小均方误差(MMSE )准则的维纳滤波器和最陡下降法的基础上,由 Widrow 和 Hoff 于 1960 年提出的。
固定步长最小均方(LMS )自适应算法也常称为标准 LMS 算法,它以期望响应和滤波输出信号之间误差的均方值最小为目标,它依据输入信号在迭代过程中估计梯度矢量,并更新权系数以达到最优的自适应迭代算法。
下面以横截型结构的自适应 FIR 滤波器为例,进行最小均方算法的公式推导。
图 2.3 自适应横截型滤波器结构框图
设滤波器系数矢量为()()()()T M n w n w n w n w ][121-= ,滤波器抽头输入信号矢量为()()()()T M n x n x n x n x ]11[+--= ,自适应横截型滤波器结构框图,如图 3.1 所示。
滤波器输出信号()n y 为:
()()()()()i n x n w n x n w n y M i i T
-=*=∑-=1
0 上式中“T ”表示转置,n 为时间指针,M 为滤波器长度。
那么滤波器误差信号 e(n)表示为:
()()()()()()n x n w n d n y n d n e T *-=-=
基于 Widrow Hoff 的 LMS 算法,即随机梯度法,采用瞬时()()n x n e 2-来替代上式()()[]n x n e E 2-的估计运算,则有迭代公式:
()()()()n x n e n w n w **+=+μ21
其中 µ 是步长因子。
基于最小均方误差准则的最小均方(LMS )算法设计流程为:
(1)自适应滤波算法的参数初始化:N(自适应滤波器长度)、 µ (步长因子,LMS 算法稳定的收敛条件为:0 <µ <1/λmax ,λmax 是输入信号自相关矩阵的最大特
征值);
(2)设置初始条件: w(0) =0 或由先验知识确定;
(3)自适应信号处理:取得 x(n) , d(n) ,对每一时刻 n=1,2,…进行迭代计算
滤波:)()()(n x n w n y T =
误差估计:)()()(n y n d n e -=
权向量更新:)()(2)()1(n x n e n w n w μ+=+
要使 LMS 算法权向量收敛于均值,步长因子 µ 需满足下面条件:
max 10λμ<<
式中λmax 是输入信号自相关矩阵 R 的最大特征值,且 λmax 不可能大于 R
的轨迹(R 的对角元素之和),由于 tr[R]正好是(M+1)倍输入信号功率,M 为滤波器长度。
权向量均值的收敛条件可定义为:
输入信号功率)1(1
0+<<M μ
LMS 算法的收敛速度,主要取决于输入信号的特性。
其特征值的分散程度可以通过输入信号的最大和最小谱幅度的比率估计。
对于具有相对平坦的幅频特性的信号,例如白噪声,它可以得到较快的收敛速度。
但是对于一些其他信号,如语音信号,由于它们包含有一些功率差异比较大的信号成分,因而其特征值比较分散,从而导致算法的收敛速度比较慢。