LMS算法及改进
- 格式:doc
- 大小:55.50 KB
- 文档页数:5
改进变步长LMS 算法在系统辨识中的应用及性能分析马二涛,李建海,刘保华,罗 京(空军工程大学工程学院 陕西西安 710038)摘 要:提出一种改进的自适应变步长最小均方(L M S)算法,该算法利用e 4(n)和遗忘因子K (n)共同调整步长,同时具有在初始阶段和未知系统时变阶段自适应步长增大而稳态时步长变小的特点,更好地解决了稳态误差与收敛时间之间的矛盾。
将该算法应用到系统辨识中,与一般的变步长算法相比,改进算法具有更快的参数辨识速度和更小的稳态误差,同时还具有很好地跟踪多时变系统的能力。
关键词:最小均方算法;变步长;自适应滤波;系统辨识中图分类号:T N911.7 文献标识码:A 文章编号:1004-373X(2010)06-145-04Application and Performance Analysis of LMS Algorithm withVariable Step Size in System IdentificationM A Ertao,L I Jianhai,L IU Bao hua,L U O Jing(T he Eng i neeri ng Institut e ,Air Fo rce Engineering U niv ersity ,Xi c an,710038,China)Abstract :A n impr ov ed L east M ean Squar e(L M S)alg or ithm w ith adaptiv e step size is pr oposed.U tilizing the fo ur th pow er of instantaneo us er ro r and fo rg etting factor to adjust the step size,the improv ed alg or ithm incr eases adaptiv ely at t he beg inning of the alg or ithm or unkno wn system changing wit h time,and it is sma ller during the steady state.M eanw hile the alg or ithm ef -ficient ly o ver co me the discr epancy bet ween the co nv erg ence rate and t he steady er ror.W hen this algo rithm is applied to system identification,a significant impr ovement can be achieved in the identify ing speed,smaller steady er ro r and bett er tracking capa -bility ,as compared with the tr aditio nal alg or ithms with adaptive step size.Keywords :L M S alg or ithm;va riable step size;adaptiv e filter;sy stem identificat ion收稿日期:2009-11-170 引 言自适应滤波技术以其而自学习能力很强、自跟踪能力和算法简单易实现而广泛应用于噪声干扰的抵消、雷达阵列处理、通信系统的自适应均衡和系统辨识等方面[1]。
关键词:光谱识别;lms算法;变步长自适应滤波lms(least mean second)算法是在工程中应用非常广泛的一种自适应信号处理算法。
lms 算法的突出优点是算法简单,易于实现且不要求离线计算,因此这种算法在实时信号处理中应用非常广泛。
然而基本的lms算法采用了固定的收敛因子,导致了失调误差与收敛速度的矛盾。
许多文献都从改变收敛因子着手,也较好的协调了这一矛盾。
但是众多文献[1~3]中对这一理论的改进所引用的信号源大部分都是理想状态下的仿真信号,具有理想的期望输出信号。
笔者认为lms算法由于它的四条独立性假设,使其在处理理想仿真信号时与处理各种实际信号时具有较大的差异。
因此在实际问题中研究lms算法并加以改进是有必要的。
1.1基本lms算法基本lms算法所处理的信号需要满足独立性假设:假定横向滤波器的输入向量是彼此统计独立的向量序列。
当它们之间不满足统计独立的条件时,基本lms算法的性能将下降,尤其是收敛速度会比较慢。
因此基本lms算法处理零均值平稳随机过程可以得到较好的效果。
在仿真模拟中噪声一般采用高斯白噪声得到的处理效果令人满意。
对于图1所示的lms自适应横向滤波器,输入信号的输入矢量为x(n)=[xn,xn-1,…,xn-m+1]t(1)滤波器抽头系数矢量为滤波器的输出为y(n)相对于滤波器期望输出d(n)的误差为e(n)=d(n)-y(n)=d(n)-ω(n)tx(n)(4)根据最小均方误差准则,最佳的滤波器参量应使得性能函数―均方误差为最小。
基本lms算法的迭代方程为ω(n+1)=ω(n)+2μe(n)x(n)(5)其中,μ为控制收敛速度的常量,称为自适应增益,也称为步长因子。
为了保证迭代后收敛,μ必须满足00为修正系数,为误差系数。
这种算法在理想仿真信号环境下可以取得不错的效果,但是应用在本文所提到的信号环境下即陷于发散。
2 改进后的可变步长lms算法改进后的算法避免了在暂态时步长因子过小而导致的收敛速度慢,同时达到稳态后收敛速度加快。
第11卷第5期空 军 工 程 大 学 学 报(自然科学版)V o.l11N o.5 2010年10月J OUR NAL OF A I R FORCE ENGI NEERI NG UNI VERS I TY(NATURAL SC IENCE EDI T I ON)O ct.2010改进的L MS算法及其在雷达干扰对消系统中的应用龙戈农, 童宁宁, 李洪兵, 田 野(空军工程大学 导弹学院,陕西 三原 713800)摘 要:为提高雷达系统在复杂电磁环境下的抗干扰能力,对雷达干扰对消系统及其自适应滤波算法进行了分析,给出了一种改进的变步长L M S自适应滤波算法。
该算法利用类S i g m o id函数去调节步长,减少了运算量,并在类S i g m o id函数中利用误差信号的自相关值调整步长,从而解决了算法较快的收敛速度与较小的稳态误差之间的矛盾,并且降低了算法对输入噪声的敏感性。
将该算法应用到自适应干扰对消系统中进行了计算机仿真验证,计算机仿真结果与理论分析一致,表明了该算法具有一定的可行性和优越性。
关键词:L M S算法;自适应干扰对消;收敛速度;收敛结果DO I:10 3969/j issn 1009-3516 2010 05 007中图分类号:TN975 文献标识码:A 文章编号:1009-3516(2010)05-0031-04现代战争的突出特点是首先打击敌方的雷达指挥系统,造成防空体系瘫痪[1]。
为提高雷达系统在复杂电磁环境下的抗干扰能力,针对雷达系统的各种电子防御技术也受到各国的高度重视,研究出更加有效的抗干扰技术、方法和手段,确保雷达在复杂电磁干扰中发挥作战效能,成为从事雷达装备设计、使用和作战人员的一项重要任务。
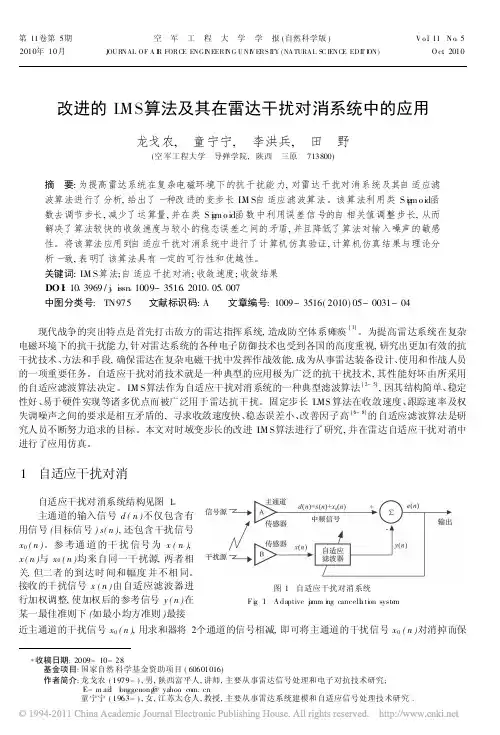
自适应干扰对消技术就是一种典型的应用极为广泛的抗干扰技术,其性能好坏由所采用的自适应滤波算法决定。
L M S算法作为自适应干扰对消系统的一种典型滤波算法[2-5],因其结构简单、稳定性好、易于硬件实现等诸多优点而被广泛用于雷达抗干扰。
LMS算法及改进LMS(Last Mean Square)算法是最小均方差算法的一种,主要用于解决线性系统的参数估计问题。
它通过对样本数据进行迭代处理,不断调整参数的数值,使得模型的预测值与实际观测值的均方差最小。
1.初始化参数:开始时,先给定参数的初始估计值,通常可以将其初始化为0或一个较小的随机数。
2.数据输入:将样本数据输入到算法中。
3.计算预测值:根据当前的参数估计值,计算系统的输出值,即模型的预测值。
4.计算误差:将预测值与实际观测值进行比较,得到误差的值。
5.更新参数:根据误差的值,调整参数的估计值,使得误差越来越小。
通常采用梯度下降的方法来更新参数,即不断地按照误差的负梯度方向更新参数。
6.重复迭代:重复进行步骤3~5,直到参数的估计值收敛,或达到最大迭代次数。
1. Normalized LMS算法:为了提高收敛速度和稳定性,引入了归一化因子来调整步长。
归一化因子可以根据当前误差的方差来自适应地调整步长,从而避免了大步长时参数估计值的剧烈波动。
2. Leaky LMS算法:该算法通过引入衰减因子,将过去的误差对当前的参数估计值的贡献进行衰减。
这样可以减小误差的影响,提高了算法的稳定性和鲁棒性。
3. Recursive Least Squares(RLS)算法:RLS算法是LMS算法的一种改进,它通过引入协方差矩阵和递归更新方法,提高了算法的收敛速度和鲁棒性。
相比于LMS算法,RLS算法在计算复杂度上更高,但在应对非平稳环境时具有更好的性能。
除上述改进算法外,还有很多其他的改进算法被提出,如Affine Projection(AP)算法、Variable Step Size(VSS)算法等。
这些改进算法在不同的应用场景下都具有独特的优势。
总之,LMS算法是一种经典的最小均方差算法,广泛应用于线性系统的参数估计问题。
然而,由于其自身的局限性,研究者们提出了一系列的改进算法,如Normalized LMS算法、Leaky LMS算法和RLS算法等,以提高算法的性能。
软件纵横 计算机与信息技术 ·57·变步长LMS 自适应滤波算法的改进及分析蔡卫菊 金波(长江大学,湖北 荆州 434000)摘 要 在对传统LMS 算法、变步长LMS 算法及其改进算法分析的基础上,提出了一种改进的变步长LMS 算法。
新算法通过建立步长因子与误差信号之间的非线性函数关系,使其初始阶段和时变阶段步长自适应增大和稳态阶段步长很小,具有收敛速度快,稳态误差小,迅速跟踪跃变系统的变化,并且不易受噪声影响的特点。
理论分析和计算机仿真结果表明该算法优于传统算法。
关键词 LMS 算法;变步长;误差信号1 引言最小均方误差LMS 算法最早由Widrow 和Hoff 于20世纪60年代提出,由于其结构简单,性能稳定,计算复杂度低,便于硬件实现等特点,一直是自适应滤波经典算法之一,因而被广泛应用于系统辨识,信号处理和自动控制等领域,具体包括神经网络的学习过程,噪声背景下的信号检测,天线旁瓣干扰的对消,电话线路中的回波消除等。
传统的LMS 算法采用固定步长,其缺点是在收敛速度和收敛精度之间存在矛盾。
为解决这一问题,人们提出许多改进的LMS 算法,其中很大类是变步长LMS 算法。
即在算法收敛过程中动态改变步长的大小。
这些算法的基本思想是算法初始阶段采用一个较大的步长,使算法具有较快的收敛速度和跟踪速度,然后随着收敛的加深逐渐减小步长来减小稳态误差。
本文在基本的LMS 算法和变步长LMS 算法分析的基础上,提出了新的自适应变步长算法,使其具有较快的收敛速度,较高的收敛精度和良好的跟踪时变系统的能力,同时具有较好的抗噪声性能。
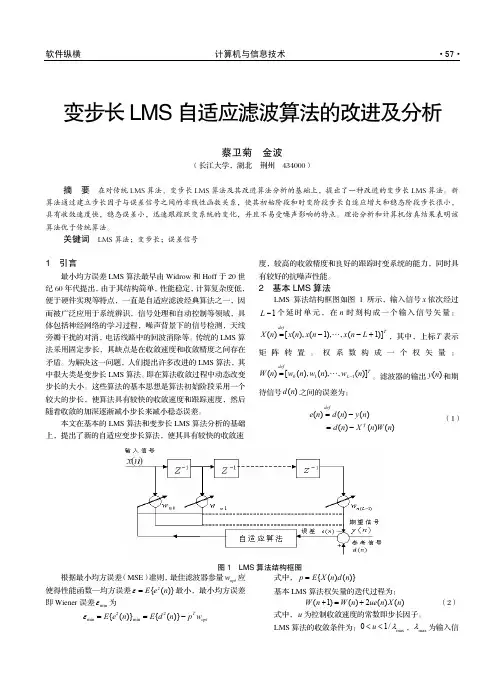
2 基本LMS 算法LMS 算法结构框图如图1所示,输入信号x 依次经过1−L 个延时单元,在n 时刻构成一个输入信号矢量:T defL n x n x n x n X )]1(,),1(),([)(+−−=L ,其中,上标T 表示矩阵转置。
权系数构成一个权矢量:T L defn w n w n w n W )](,),(),([)(110−=L 。
第07卷 第05期 中 国 水 运 Vol.7 No.05 2007年 05月 China Water Transport May 2007收稿日期:2007-1-27作者简介:刘迎冬 男(1980—) 武汉理工大学信息工程学院 硕士研究生刘 岚 男(1956—) 武汉理工大学信息工程学院 教授研究方向:嵌入式系统应用 嵌入式系统集成一种改进的LMS 算法刘迎冬 刘 岚摘 要:在一种变步长LMS 算法的基础上,引进动量因式,提出了一种新的改进LMS 的算法。
新算法整体性能优于变步长LMS 算法以及LMS 算法。
通过理论分析,比较了新的算法和变步长LMS 算法以及LMS 算法的收敛性和稳态性,提出了一种设想以提高新算法的稳态性。
仿真试验证明了新算法的优越性以及设想的在仿真条件下的正确性。
关键词:LMS 算法 变步长 收敛性 稳态性中图分类号:TP14 文献标识码:A 文章编号:1006-7973(2007)05-0142-03 一、引言LMS 自适应算法由于运算量小,易实现,目前在工程应用上较为广泛。
但由于是以平方误差代替均方误差,会带来很大的梯度估计噪声,在实际的系统中表现为稳态性差,收敛缓慢。
对于改进LMS 自适应算法的收敛性,目前主要有三种方法[1]。
本文所提出的一种改进的LMS 是在一种变步长LMS 算法的基础上,利用该算法较好的稳态性,在其基础上引进动量因子以加快算法的收敛而实现的。
改进的LMS 算法能达到较好的收敛性与稳态性的平衡,且收敛性与稳态性均优于传统的LMS 算法,整体性能也高于变步长LMS 算法。
仿真试验结果证明了该算法的优越性。
二、传统LMS 算法 1.LMS 算法LMS 算法是为了求解自适应滤波的最佳权系数而提出的一种在实际工程上应用的算法。
LMS 的核心思想是从在搜索最佳的权系数时,用平方误差代替均方误差,以方便实现。
本文以LMS 算法运用在自适应滤波器对含噪声的信号进行消噪为例来分析算法。
目录一、绪论 (2)1.1 论文背景及研究意义 (2)1.2 音频简介 (2)1.3 自适应滤波理论的发展 (3)1.3.1 FIR滤波器的结构 (5)1.4 自适应滤波算法简介 (6)1.4.1 基于维纳滤波理论的算法 (6)1.4.2 基于卡尔曼滤波理论的算法 (7)1.4.3 基于最小二乘法的算法 (8)1.4.4 基于神经网络的算法 (8)1.5自适应LMS算法的发展 (9)1.5.1 LMS算法的历史 (9)1.5.2 LMS算法的发展现状 (10)1.5.3 LMS算法的发展前景 (10)1.6 变步长LMS算法 (11)二、最小均方算法 (12)2.1 LMS算法原理 (12)2.2 LMS算法性能分析 (13)2.2.1 收敛性 (13)2.2.2 收敛速度 (15)2.2.3 稳态误差 (16)2.2.4 计算复杂度 (17)2.3 变步长的LMS (17)三、实验过程 (19)3.1 LMS算法实现 (19)3.1.1 音频读取 (19)3.1.2 参考噪声及带噪信号的获得 (19)3.1.3 LMS算法 (21)3.1.4 代码实现 (23)3.2 VSSLMS算法实现 (25)3.2.1 VSSLMS算法 (25)3.2.2 代码实现 (27)3.3 本章总结 (29)四、总结与展望 (30)4.1 论文总结 (30)4.2 展望 (30)五、参考文献 (31)一、绪论1.1 论文背景及研究意义自适应信号处理是现代通信处理的一个重要分支学科。
与传输函数恒定的滤波器相比,自适应滤波器能根据环境自动调节抽头系数以达到最佳工作状态,被广泛应用于通信、雷达、系统控制和生物医学工程等领域。
自适应信号处理的主要应用有均衡、系统辨识、阵列信号的波束成形、噪声对消和预测编码等。
在音频降噪方面,自适应信号处理也应用诸多。
音频中降噪方法很多,按照是否有参考信号可以将降噪分为主动降噪和被动降噪。
一.LMS算法LMS算法即最小均方误差(least-mean-squares) 算法,是线性自适应滤波算法,包括滤波过程和自适应过程。
基于最速下降法的LMS算法的迭代公式如下:e ( n) = d ( n)- w ( n - 1) x ( n) (1)w ( n) =w ( n - 1) + 2μ( n) e ( n) x ( n) (2)式中,x ( n)为自适应滤波器的输入;d ( n)为参考信号;e ( n)为误差;w ( n)为权重系数;μ( n)为步长。
LMS算法收敛的条件为:0 <μ< 1/λmax ,λmax是输入信号自相关矩阵的最大特征值。
二.LMS算法的改进由于LMS算法具有结构简单,计算复杂度小,性能稳定等特点,因而被广泛地应用于自适应均衡、语音处理、自适应噪音消除、雷达、系统辨识及信号处理等领域。
但是这种固定步长的LMS 自适应算法在收敛速率、跟踪速率和稳态误差特性之间的要求是相互矛盾的,不能同时得到满足,其性能由步长来控制。
初始收敛速度、时变系统跟踪能力及稳态失调是衡量自适应滤波算法优劣的三个最重要的技术指标。
在LMS算法中最简单的学习速率参数选择是取μ( n)为常数,即:μ( n) =μ0 <μ<1/λmax式中:λmax是输入信号自相关矩阵的最大特征值。
然而,这种方法会引起收敛与稳定性能的矛盾,即大的学习速率能够提高滤波器的收敛速率,但稳态性能就会降低;反之,为了提高稳态性能而采用小的学习速率时,跟踪速度和收敛就会慢,因此,学习速率的选择应该兼顾稳态性能与收敛速率。
简单而有效的方法就是在不同的迭代实践使用不同的学习速率参数,即采用时变的学习速率。
这就是变步长LMS自适应滤波算法。
这些变步长的LMS 自适应算法的指导思想是:在初始收敛阶段或未知系统参数发生变化时,步长应比较大,这使得算法有较快的收敛速度或对时变系统的跟踪速度,然后随着收敛的加深而逐渐减小步长来减小稳态误差。
改进的变步长LMS改进算法张晶晶;周菲菲;许帅【摘要】在基于Lorentzian函数的变步长LMS自适应滤波算法的基础上,进行进一步改进,提出了一种新的自适应LMS滤波算法,通过建立新的误差信号e(n)与变步长因子μ(n)之间的关系,消除不相关噪声的影响。
并用Matlab对其进行仿真验证,表明该算法解决了收敛速度和稳态误差之间的矛盾,在保证算法的计算复杂度较低的同时,使得算法的抗干扰能力进一步提高,适用于低信噪比条件下的信号提取及滤波,为实际应用提供了更大的灵活性。
%A new adaptive LMS filtering algorithm is proposed by improving the Lorentzian function-based variable step size LMS adaptive filtering algorithm. Through establishing the relationship between error signal e(n) and variable step size factorμ(n) to undo the uncorrelated noise. The algorithm is simulated by Matlab,and the results show that the improved algorithm has solved the contradiction between the convergence rate and steady-state error. The anti-interference ability of the algorithm is im-proved while guaranteeing the computational complexity is lower. It is suitable for low SNR signal extraction and filtering,and provides greater flexibility for the practical application.【期刊名称】《现代电子技术》【年(卷),期】2014(000)001【总页数】3页(P11-13)【关键词】自适应滤波;噪声抵消;收敛速度;抗干扰能力【作者】张晶晶;周菲菲;许帅【作者单位】装甲兵工程学院,北京 100072;装甲兵工程学院,北京 100072;装甲兵工程学院,北京 100072【正文语种】中文【中图分类】TN91-341960年Widrow和Hoff提出了最小均方误差(Least-Mean-Square,LMS)算法,该算法可以将自适应滤波系统的参数自动调整到最佳状态。
频域lms算法频域LMS算法是一种常用的自适应滤波算法,主要用于信号处理和系统辨识等领域。
本文将介绍频域LMS算法的原理、应用以及优缺点。
一、频域LMS算法原理频域LMS算法是基于最小均方(Least Mean Square,LMS)准则的自适应滤波算法。
其主要思想是通过最小化误差信号的均方差,来不断调整滤波器的系数,从而实现滤波器的自适应更新。
具体来说,频域LMS算法将输入信号和滤波器系数都转化到频域进行处理。
首先,将输入信号和滤波器系数都进行傅里叶变换,得到它们的频域表示。
然后,根据LMS准则,通过计算误差信号的均方差梯度来更新滤波器系数。
最后,将更新后的频域滤波器系数进行反傅里叶变换,得到时域滤波器系数,从而实现滤波器的更新。
二、频域LMS算法应用频域LMS算法在信号处理和系统辨识等领域有着广泛的应用。
以下是几个常见应用场景:1. 自适应滤波:频域LMS算法可以用于自适应滤波,通过不断调整滤波器系数,从输入信号中提取出所需的信息,抑制不需要的噪声和干扰。
这在语音增强、图像去噪等领域有着重要的应用。
2. 信道均衡:在通信系统中,信道的非理想性会引入干扰和失真,影响系统性能。
频域LMS算法可以用于信道均衡,通过自适应滤波来抵消信道引入的失真,从而提高系统的传输性能。
3. 系统辨识:频域LMS算法可以用于系统辨识,通过分析输入信号和输出信号之间的关系,从中提取出系统的特征和参数。
这在控制系统设计和模型建立中起到了重要作用。
三、频域LMS算法优缺点频域LMS算法具有以下优点:1. 计算效率高:由于频域LMS算法将信号和滤波器系数都转化到频域进行处理,可以利用快速傅里叶变换等高效算法,提高计算效率。
2. 收敛速度快:频域LMS算法可以通过选择合适的步长参数和初始化滤波器系数,提高算法的收敛速度。
3. 适用性广:频域LMS算法可以应用于各种信号处理和系统辨识问题,具有较好的通用性。
然而,频域LMS算法也存在一些缺点:1. 算法复杂度高:频域LMS算法需要进行频域转换和反转换操作,增加了算法的复杂度和计算开销。
自适应滤波LMS算法及RLS算法及其仿真1.引言2.自适应滤波LMS算法LMS(Least Mean Square)算法是一种最小均方误差准则的自适应滤波算法。
其基本原理是通过不断调整滤波器的权值,使得输出信号的均方误差最小化。
LMS算法的迭代公式可以表示为:w(n+1)=w(n)+μ*e(n)*x(n)其中,w(n)为滤波器的权值向量,μ为步长因子,e(n)为误差信号,x(n)为输入信号。
通过迭代更新权值,LMS算法逐渐收敛,实现了自适应滤波。
3.RLS算法RLS(Recursive Least Square)算法是一种递归最小二乘法的自适应滤波算法。
相比于LMS算法,RLS算法具有更好的收敛性能和适应性。
RLS算法基于最小二乘准则,通过递归式地计算滤波器权值矩阵,不断优化滤波器的性能。
迭代公式可以表示为:P(n)=(P(n-1)-P(n-1)*x(n)*x(n)'*P(n-1)/(λ+x(n)'*P(n-1)*x(n))) K(n)=P(n)*x(n)/(λ+x(n)'*P(n)*x(n))w(n+1)=w(n)+K(n)*e(n)其中,P(n)为滤波器的协方差矩阵,K(n)为最优权值,λ为遗忘因子(用于控制算法的收敛速度),e(n)为误差信号。
4.仿真实验为了验证LMS算法和RLS算法的性能,我们进行了一组仿真实验。
假设输入信号为一个正弦信号,噪声为高斯白噪声。
我们分别使用LMS和RLS算法对输入信号进行自适应滤波,比较其输出信号和原始信号的均方误差。
在仿真中,我们设置了相同的滤波器长度和步长因子,比较LMS和RLS算法的收敛速度和输出质量。
实验结果表明,相对于LMS算法,RLS 算法在相同条件下具有更快的收敛速度和更低的均方误差。
这验证了RLS 算法在自适应滤波中的优越性。
5.结论本文介绍了自适应滤波LMS算法和RLS算法的原理及其在仿真中的应用。
实验结果表明,相对于LMS算法,RLS算法具有更好的收敛性能和适应性。
改进的变误差宽度变阶数LMS算法: In order to solve the order mismatch problem of the adaptive filter, an improved variable error width variable fractional tap?length LMS algorithm is proposed. The parameter selection of the error width function isn′t limited by the noise prior knowledge in the algorithm, and its foundation is given. The simulation analysis are performed for the algorithm under the environments of low noise, high noise and changing noise. The simulation results show that the algorithm can be applied to the environments of the unknown system noise or changing noise,has good performance, can obtain fast order convergence rate and small steady?state error in high noise environment, and its applications are extensive.Keywords: adaptive filter; model mismatch; variable fractional tap?length; variable error width0 引言在自适应滤波应用中,大多数算法一般假设滤波器阶数(或抽头长度)是适配的;但如果滤波器阶数小于实际阶数,将会增大均方误差值;相反,滤波器阶数过大,不仅会带来很大计算量,同时会增大稳态误差。
浅析LMS算法的改进及其应用摘要:本文简单介绍了LMS算法,以及为了解决基本LMS算法中收敛速度和稳态误差之间的矛盾,提出了一种改进的变步长LMS 算法,并将其应用于噪声抵消和谐波检测中去。
关键字:LMS算法;变步长;噪声抵消;谐波检测引言自适应滤波处理技术可以用来检测平稳和非平稳的随机信号,具有很强的自学习和自跟踪能力,算法简单易于实现,在噪声干扰抵消、线性预测编码、通信系统中的自适应均衡、未知系统的自适应参数辨识等方面获得了广泛的应用。
自适应滤波则是利用前一时刻已获得的滤波器参数等结果,自动地调节现时刻的滤波器参数,以适应信号和噪声未知的或随时间变化的统计特性,从而实现最优滤波。
所谓“最优”是以一定的准则来衡量的,根据自适应滤波算法优化准则不同,自适应滤波算法可以分为最小均方误差(LMS)算法和递推最小二乘(RLS)算法两类最基本的算法。
基于最小均方误差准则,LMS算法使滤波器的输出信号与期望输出信号之间的均方误差最小,因此,本文在基本LMS算法基础上,提出一种新的变步长自适应滤波算法,将其应用于噪声抵消和谐波检测中去。
一.LMS算法LMS算法即最小均方误差(least-mean-squares) 算法,是线性自适应滤波算法,包括滤波过程和自适应过程。
基于最速下降法的LMS算法的迭代公式如下:e ( n) = d ( n)- w ( n - 1) x ( n) (1)w ( n) =w ( n - 1) + 2μ( n) e ( n) x ( n) (2)式中,x ( n)为自适应滤波器的输入;d ( n)为参考信号;e ( n)为误差;w ( n)为权重系数;μ( n)为步长。
LMS算法收敛的条件为:0 <μ< 1/λmax ,λmax是输入信号自相关矩阵的最大特征值。
二.LMS算法的改进由于LMS算法具有结构简单,计算复杂度小,性能稳定等特点,因而被广泛地应用于自适应均衡、语音处理、自适应噪音消除、雷达、系统辨识及信号处理等领域。
但是这种固定步长的LMS 自适应算法在收敛速率、跟踪速率和稳态误差特性之间的要求是相互矛盾的,不能同时得到满足,其性能由步长来控制。
初始收敛速度、时变系统跟踪能力及稳态失调是衡量自适应滤波算法优劣的三个最重要的技术指标。
在LMS算法中最简单的学习速率参数选择是取μ( n)为常数,即:μ( n) =μ0 <μ<1/λmax式中:λmax是输入信号自相关矩阵的最大特征值。
然而,这种方法会引起收敛与稳定性能的矛盾,即大的学习速率能够提高滤波器的收敛速率,但稳态性能就会降低;反之,为了提高稳态性能而采用小的学习速率时,跟踪速度和收敛就会慢,因此,学习速率的选择应该兼顾稳态性能与收敛速率。
简单而有效的方法就是在不同的迭代实践使用不同的学习速率参数,即采用时变的学习速率。
这就是变步长LMS自适应滤波算法。
这些变步长的LMS 自适应算法的指导思想是:在初始收敛阶段或未知系统参数发生变化时,步长应比较大,这使得算法有较快的收敛速度或对时变系统的跟踪速度,然后随着收敛的加深而逐渐减小步长来减小稳态误差。
实践表明,该算法可以保证较快的收敛速度和较小的失调,能有效地去除不相关噪声的干扰,而且算法本身引入的参数和计算量比较少,且易于硬件实现,可以很好地应用于自适应噪声对消系统中。
在变步长LMS自适应滤波算法的研究过程中,人们首先提出了使步长因子μ正比于误差信号e ( n) 的大小。
然后提出了一种时间平均估值梯度的自适应滤波算法。
再此之后又提出了另一种变步长自适应滤波算法,其步长因子μ与e ( n)和x ( n) 的互相关函数的估值成正比。
在分析了上述变步长自适应滤波算法之后,高鹰等人提出了一种新的变步长算法,如下式所示:W ( n + 1) = W ( n) + 2μ( n) e( n) X ( n) (3)μ( n) =β(1 - exp ( - αe( n) 2 ) ) (4)其中,参数α> 0 控制函数的形状,参数β> 0 控制函数的取值范围。
该算法简单且在参数稳定后具有缓慢变化的特性。
然而,此算法仍然对噪声比较敏感,在低信噪比环境下,该算法的收敛速度. 跟踪速度和稳态误差并不十分理想,这就大大制约了其应用范围。
而本文改进的算法中,不直接用信号误差的平方即e2( n) 调节步长,而是通过将误差信号延长一定的时间从而使噪声信号的自相关性减到零,即用误差的相关值e( n) e ( n - D) (其中D 为正整数,D选为小于输入信号的时间相关半径而大于噪声的时间相关半径)去调节步长。
由于噪声信号的自相关性减到了零,所以噪声信号对步长因子的影响大大降低,从而降低了变步长LMS 算法对噪声的敏感性。
本文改进算法的步长公式即:μ( n) =β(1 - exp ( -αe( n) e( n - D) ) ) (5)此算法用误差信号的相关值e ( n) e ( n - D) 去调节步长,兼顾了收敛速度和误差等性能,并且降低了LMS 算法对自相关性较弱的噪声的敏感性。
本文将此算法应用于自适应噪声抵消中,从理论和实践上都证明此算法效果明显。
三.LMS算法的应用(1)自适应噪声抵消自适应噪声抵消是自适应滤波器LMS 算法的一种应用,自适应噪声抵消以噪声干扰为处理对象,将它们抑制掉或进行非常大的衰减,以提高信号传递和接收的信噪比质量。
噪声抵消是利用干扰信号的相关性把它们抑制掉,但对不相关或相关性很弱的噪声信号无能为力,这些噪声信号不但不能被抵消,反而会对滤波器产生干扰,使算法效果受到影响。
而本文改进的算法可以克服这一缺点。
为了区分这两种干扰噪声信号,本文把滤波器要抵消的强相关性干扰噪声称为加性干扰噪声信号n0,把那些不相关和相关性较弱的干扰噪声信号称为噪声信号v。
图1 自适应噪声抵消框图图1为自适应噪声抵消的原理框图。
如图1 所示,主输入中含有希望提取的相关信号s 和加性干扰信号n0、噪声信号v,参考输入为n1,信号s 与v 、n0、n1 均不相关,n0和n1相关,与v 不相关。
s、v、n0、n1都为零均值信号。
由图1 可知,自适应滤波器的输出y 为n1的滤波信号。
因此,自适应抵消系统的输出为:e = s + n0 + v - y上式两边平方后取数学期望,即对时间n 取长时平均,由于s 与v 、n0、n1不相关,由此得:E( e2 ) = E[ ( s + v)2] + E[ ( n0 - y) 2 ] (6)当调节滤波器参数使E(e2 ) 最小化时,E[ ( s + v) 2 ] 不受影响,从而使最小输出能量为:Emin ( e2 ) = E[ ( s + v) 2 ] + Emin [ ( n0 - y) 2 ] (7)当E( e2 ) 最小时,E[ ( n0 - y)2 ] 也同时为最小,所以滤波器输出y 即为n0 的最佳估计值,从而达到噪声抵消的目的。
在噪声比较严重的应用环境下,v ( n) 将大大影响LMS 算法的性能,使自适应算法很难达到最优解,只能在其周围上下波动。
式(5)对算法进行了改进,采用e( n) e( n - D) 调节步长因子,改进的算法不再对噪声敏感,且仍然具有原算法的优点。
在滤波开始阶段,e (n) 较大,μ( n) 也较大。
由于噪声v (n) 的不相关或弱相关性,延时D 后v ( n) 与v ( n - D) 不再相关,所以v ( n) v ( n - D) 对μ( n) 的贡献很小,因此v (n) 对μ( n) 的影响大大降低。
于是当e (n) 变小趋于稳定时,μ(n)也变小趋于稳定,而不是像式(4)那样μ( n) 大大地受到v( n) 影响。
改进的算法步长与噪声v (n) 无关,只与输入信号和有用信号有关,克服了原算法对噪声的敏感性,仍然保留了原算法的优点,而且在低信噪比的环境中仍能保持良好的性能,大大地拓宽了该算法的应用范围。
(2)谐波检测假设流过非线性负载的电流为:(8)式中:i 1 (t) 为基波电流;i h (t) 为高次谐波电流总和。
把自适应算法应用于谐波检测的基本思想如图2所示。
将总输入电流的所有谐波总和,视i h (t)为要输出的干扰信号;i 1 (t)为要去除的基波信号。
参考输入为基波电压及其经过90°移相后的信号,因为电压信号的畸变很小。
其输出iy 在幅值和相位上逼近i 1 (t) ,进而能够抵消掉输入信号中的i 1 (t),因此e 端输出所有谐波信号的总和i h (t),即APF 的补偿指令信号。
图2 自适应谐波电流检测自适应谐波电流检测如图2所示。
建立一个二阶自适应滤波器,两个权值w 1,w 2可以使得组合后的正弦波的幅度和相位都可以调整,因为两个权表示有两个自由度待调整。
经过组合相加后得到iy ,其幅度和相位都可以与原始输入中的i 1 (t)相同,使输出e 中的单频得以抵消。
参考输入选取电压信号u ﹡(t)。
经过实验仿真比较,固定步长算法有着固有的内在缺陷,即算法收敛慢、跟踪性能差, 不适合在谐波检测的低信噪比条件下使用。
反之,在可变步长算法下,系统超调小、收敛快、跟踪性能好。
结束语因原算法对噪声的敏感性, 本文改进的算法采用e( n) e( n- D)调整步长因子而不是原算法的e( n)2,克服了对自相关较弱的噪声的敏感性,同时又保留了原算法的优点,因此性能得到明显改善。
本文将此算法应用到自适应噪声抵消和谐波检测中,得到了良好的效果。
此算法还可以应用到自适应LMS 算法的其它应用领域中,同理可以克服算法对自相关性较弱的噪声的敏感性。
因此,改进的算法具有更为广阔的应用前景。
-90° + LMSi 1=i l +i hw 1w 2eu ﹡(t)参考文献[1] 冯冬青, 孙长峰, 费敏锐. 一种新的变步长LMS算法研究及其应用[J]. 自动化仪表, 2007,28(8): 67-69.[2] 孙娟, 王俊, 刘斌. 一种新的变步长LMS算法及其应用[J]. 雷达科学与技术, 2007, 5(5): 379-383.[3] 张玲玲, 唐晓英, 刘伟峰. 一种新的变步长LMS自适应滤波算法性能分析[J]. 生命科学仪器, 2005, 3(5): 39-41.。