基于AT89C51单片机设计的简易智能机器人的设计
- 格式:doc
- 大小:121.50 KB
- 文档页数:6

基于AT89C51单⽚机和ULN2003驱动芯⽚的步进电机控制及驱动电路系统的设计摘要 (1)Abstract (2)第⼀章.绪论 (2)1.1设计背景 (4)1.2关于国内外同类产品的发展和应⽤ (4)1.3 本⽂所做的⼯作 (5)1.4 研究内容与安排 (5)第⼆章系统总体⽅案设计 (7)2.1 设计原理 (7)2.2 主要元器件介绍 (8)2.2.1 四相六线步进电机的介绍 (8)2.2.2 AT89C51单⽚机芯⽚介绍 (10)2.2.3 ULN2003芯⽚介绍 (11)2.2.4 LED七段数码管介绍 (12)第三章步进电机控制及驱动系统电路设计实现 (13)3.1 硬件设计 (13)3.2 软件设计 (17)第四章电路调试 (18)第五章总结 (20)致谢 (21)参考⽂献 (22)附录 (23)摘要本⽂主要研究了⼀种基于AT89C51单⽚机和ULN2003驱动芯⽚的步进电机控制及驱动电路系统的设计。
该系统可分为:控制模块、驱动模块、显⽰模块、⼈机交互模块四⼤部分。
其中采⽤AT89C51单⽚机作为控制模块的核⼼,利⽤单⽚机编程实现了对步进电机启动停⽌、正转反转、加速减速等功能的基本控制。
驱动模块由芯⽚ULN2003A驱动步进电机⼯作;显⽰部分由七段LED共阴数码管组成;⼈机互换部分由相应的按键实现相应的功能。
通过实际测试表明本设计系统的性能优于传统步进电机控制器,具有结构简单、可靠性⾼、实⽤性强、⼈机接⼝简单⽅便、性价⽐⾼等特点。
此外,本⽂还介绍了步进电机的基本原理及AT89C51单⽚机的性能特点。
关键词:步进电机;ULN2003; AT89C51;AbstractThis article mainly introduced the basic principle of stepping motor and the performance characteristics of AT89C51.Design research based on AT89C51 and ULN2003 stepper motor driver chips control and drive circuit system.The system can be divided into: control module, drive module, display module, human–computer interaction module.The AT89C51 single chip microcomputer as the core of the control module, microcontroller programming has realized the start stop the stepper motor, forward reverse, speed reducer, and other functions of basic control.Driver module driven by chip ULN2003A stepper motor;Display section is made up of seven segment digital tube LED, Yin;Man-machine interchangeable parts by the corresponding button to achieve the corresponding function.Through the actual test show that the system performance is superior to the traditional stepping motor controller is designed, with simple structure, high reliability and strong practicability, simple and convenient man-machine interface, high cost performance, etc.Key words: stepper motor;ULN2003;AT89S52 devices.摘要 (1)Abstract (2)第⼀章.绪论 (4)1.1设计背景 (4)1.2 关于国内外同类产品的发展和应⽤ (4)1.3 本⽂所做的⼯作 (5)1.4 研究内容与安排 (5)第⼆章系统总体⽅案设计 (7)2.1 设计原理 (7)2.2 主要元器件介绍 (8)2.2.1 四相六线步进电机的介绍 (8)2.2.2 AT89C51单⽚机芯⽚介绍 (10)2.2.3 ULN2003芯⽚介绍 (11)图2.6 ULN2003逻辑图 ..................................................................................................................... 11 2.2.4 LED 七段数码管介绍............................................................................................................... 12 图2.7六位LED 共阴数码显⽰管图 (12)第三章步进电机控制及驱动系统电路设计实现 (13)3.1 硬件设计 (13)1B 11C 162B 22C 153B 33C 144B 44C 135B 55C 126B 66C 117B77C10COM 9U2ULN2003AXTAL218XTAL119ALE 30EA31PSEN 29RST9P0.0/AD039P0.1/AD138P0.2/AD237P0.3/AD336P0.4/AD435P0.5/AD534P0.6/AD633P0.7/AD732P1.01P1.12P1.23P1.34P1.45P1.56P1.67P1.78 P3.0/RXD 10P3.1/TXD 11P3.2/INT012P3.3/INT113P3.4/T014P3.7/RD17P3.6/WR 16P3.5/T115P2.7/A1528P2.0/A821P2.1/A922P2.2/A1023P2.3/A1124P2.4/A1225P2.5/A1326P2.6/A1427U1AT89C51 ............................................................................................................................................................ 14 3.2 软件设计.. (17)第四章电路调试 ................................................................................................... 18 第五章总结............................................................................................................. 20 致谢......................................................................................................................... 21 参考⽂献................................................................................................................. 22 附录 . (23)第⼀章.绪论1.1设计背景电⽓时代的今天,电动机⼀直在现代化的⽣产和⽣活中起着⼗分重要的作⽤。

重庆科技大学本科毕业论文基于AT89C51单片机的步进电动机控制系统设计考生姓名: XXXXX X 准考证号: XXXXXXXXXXXX 专业层次:本科院(系):XXXXXXXXXXXXXXXXXXX 指导教师: XXXXXX 职称:讲师重庆科技大学二O一二年月日基于AT89C51单片机的步进电动机控制系统设计考生姓名: XXXXXX准考证号: XXXXXXXXXXXX专业层次:本科指导教师: XXXXXXX院(系):机械与动力工程学院重庆科技大学二O一二年九月二十日摘要随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
步进电机是一种能将电脉冲信号转换成角位移或线位移的机电元件,步进电机控制系统主要由步进控制器,功率放大器及步进电机等组成。
采用单片机控制,用软件代替上述步进控制器,使得线路简单,成本低,可靠性大大增加。
软件编程可灵活产生不同类型步进电机励磁序列来控制各种步进电机的运行方式。
本设计是采用AT89C51单片机对步进电机的控制,通过I/O口输出的时序方波作为步进电机的控制信号,信号经过芯片ULN2003驱动步进电机。
实践证明,基于单片机控制的步进电机比传统的步进控制器具有更好的性能,更加简单、方便、可靠。
本设计的主要研究对象就是开环伺服系统中最常用的执行器件——步进电机。
关键词:步进电机,单片机,正反转控制,键盘控制,LCD液晶显示Based on the AT89C51 single-chip stepper motor controlsystem designABSTRACTWith the development of microelectronics and computer technology, the stepper motor demand grow with each passing day, which is widely used in printers, electric toys and other consumer products, industrial robots and CNC machine tools, medical equipment and other mechanical and electrical products, the national economy in various fields are applied. Study of stepping motor control system, to improve the control precision and response speed, energy saving etc have important significance.A stepper motor can be converted into electric pulse signal of angular displacement or line displacement of the mechanical and electrical components, a stepper motor control system is mainly composed of a stepping controller, a power amplifier and a stepper motor. Using single chip microcomputer control, using software to replace the stepping controller, which has the advantages of simple circuit, low cost, reliability is increased. Software programming can produce different types of step motor excitation sequence to control stepper motor operation mode.This design is the use of AT89C51 single-chip stepper motor control, through the I/O port output timing square wave as a stepper motor control signal, the signal through the ULN2003 chip stepper motor driver.Practice has proved, based on the single chip microcomputer to control the step motor than the traditional stepping controller has better performance, more simple, convenient, and reliable. The design of the main research object is the open loop servo system in the most commonly used executive device -- stepping motor.Keywords:Stepper motor, MCU, Positive control, Keyboard control, LCD liquid crystal display目录中文摘要 (I)英文摘要 (II)1 绪论 (1)1.1 步进电机及其发展 (1)1.2 步进电机在我国的发展应用及前景 (1)1.3 设计研究内容 (2)2 控制系统硬件分析与设计 (3)2.1 步进电机 (3)2.1.1 步进电机的原理 (3)2.1.2 步进电机的特点 (4)2.1.3 步进电机的分类 (4)2.1.4 永磁步进电机的控制原理 (5)2.2 单片机的选择 (6)2.2.1 单片机的引脚功能 (6)2.2.2 主要特性 (6)2.3 步进电机控制系统的组成 (7)2.3.1 键盘控制电路 (7)2.3.2 LCD液晶显示电路 (8)2.3.3 步进电机驱动电路 (10)3 控制系统软件分析与设计 (13)3.1 程序流程图 (13)3.2 读键盘子程序流程图 (14)3.3 键盘处理子程序流程图 (14)3.4 电机控制中断程序流程图 (15)4 调试与改进 (17)4.1 调试与改进 (17)4.2 运行结果 (17)结论 (19)致谢 (20)参考文献 (21)附录一 (22)附录二 (27)论文原创性声明1 绪论1.1 步进电机及其发展步进电机又称为脉冲电动机或阶跃电动机,它是基于最基本的电磁感应作用,将电脉冲信号转变为角位移或线位移的开环控制元件。

基于AT89C5仲片机的最小系统设计组员:田竹、王维、袁倍明摘要:本次实验课题为设计一个基于AT89C51单片机的最小系统。
用P1 口设计流水灯,用P2 口和P0 口分别作段选和位选设计了六位数码管的静动态显示和简易的电子钟,用P3 口设计了一个4*4的矩阵键盘,并用蜂鸣器实现了唱歌功能和键盘按下的声响,用62256扩展内部RAM,还扩展并实现了LCD1602的静动态显示,最后通过ADC0809和DAC0832分别实现了A/D、D/A转换功能。
一、系统电源用MC7805集成稳压器将输入电压转为+5V稳压给系统供电二、晶振(12MHZ )及复位电路采用12MHz的外部晶振,给系统提供时钟信号。
并采用了按键复位电路。
LJMP LOOPDLY:MOV R7,#250 ;延时子程序 DLY1: MOV R6,#200DJNZ R6,$ DJNZ R7,DLY1 RET 源程序:ORG 0000HLJMP START ORG 0100H START:MOV P0,#0 MOV P2,#0F9HSETB P0.0 LCALL DELAY CLR P0.0 MOV P2,#0C4H源程序: 流水灯116 D3U1 2 1T°3■EKSK"--------- ---1 1亠门7 rS-------- 1^EHZFHk.11~6二93ICMrn寸9日。
日日日。
日且Q26LEDq o pJ3 p1…「zgLo o 二o1 d—-1--1、流水灯功能描述:让8个led 灯循环闪烁 D2*5V| LEDORes Pack436ORPIOPll P12P13P14P15P16数码管动态显示窝21END四、数码管功能描oSETB P0.1LCALL DELAYCLR P0.1MOV P2,#0D0HSETB P0.2LCALL DELAYCLR P0.2MOV P2,#99HSETB P0.3LCALL DELAYCLR P0.3MOV P2,#92HSETB P0.4LCALL DELAYCLR P0.4MOV P2,#82HSETB P0.5LCALL DELAYCLR P0.5LJMP STARTDELAY: MOV R5,#10D1: MOV R6,#20D2: MOV R7,#248DJNZ R7,$DJNZ R6,D2DJNZ R5,D1RETEND五、4*4矩阵键盘和蜂鸣器功能描述:通过按键让数码管显示0-F,按键按下时,蜂鸣器响一下LSIP2_ Speaker —GND源程序:ORG 0000HLJMP MAINORG 0100HMAIN: MOV P0,#0FFHMOV B,#4MOV P3,#0F0H;列置0,看行电平JNB P3.4,L1JNB P3.5 ,L2JNB P3.6 ,L3JNB P3.7 ,L4AJMP MAINL1: MOV R1,#0AJMP LL1L2: MOV R1,#1AJMP LL1L3: MOV R1,#2AJMP LL1L4: MOV R1,#3AJMP LL1LL1: ACALL DL10MS;消抖MOV A,P3XRL A,#0F0HJZ MAINMOV P3,#0FH;行置0,看列电平JNB P3.0,L5JNB P3.1 ,L6JNB P3.2 ,L7JNB P3.3 ,L8L5: MOV 20H,#0AJMP KEYL6: MOV 20H,#1AJMP KEYL7: MOV 20H,#2AJMP KEYL8: MOV 20H,#3AJMP KEYKEY:MOV A,R1; 计算键值并查表赋值MUL ABADD A,20HMOV R2,AMOV DPTR,#TABLEMOV A,R2MOVC A,@A+DPTRMOV P2,ACALL BEEP_BLLCALL DELAYLJMP MAINBEEP_BL: CLR P2.7;蜂鸣器子程序ACALL DELAY SETBP2.7 RETDELAY: MOV R5,#50延时D1: MOV R6,#20D2: MOV R7,#50DJNZ R7,$DJNZ R6,D2DJNZ R5,D1RETDL10MS:MOV R7,#05HLOOP1: MOV R6,#0F9HLOOP2:NOPNOPDJNZ R6,LOOP2DJNZ R7,LOOP1RETTABLE:DB 0A0H,0F9H,0C4H,0D0H,99HDB 92H,82H,0F8H,80H,90HDB 88H,83H,0A6H,0C1H,86H DB 8EHEND六、时钟功能描述:在数码管上实现时钟功能,并通过矩阵键盘的调时,调分。

基于单片机的自动避障小车设计一、本文概述随着科技的发展和的日益普及,自动避障小车作为智能机器人的重要应用领域之一,其设计与实现具有重要意义。
本文旨在探讨基于单片机的自动避障小车设计,包括硬件平台的选择、传感器的配置、控制算法的实现以及整体系统的集成。
本文将首先介绍自动避障小车的背景和研究意义,阐述其在实际应用中的价值和潜力。
接着,详细分析单片机的选型依据,以及如何利用单片机实现小车的避障功能。
在此基础上,本文将深入探讨传感器的选取和配置,包括超声波传感器、红外传感器等,以及如何通过传感器获取环境信息,为避障决策提供数据支持。
本文还将介绍控制算法的设计与实现,包括基于模糊控制、神经网络等先进控制算法的应用,以提高小车的避障性能和稳定性。
本文将总结整个设计过程,展示自动避障小车的实物样机,并对其性能进行评估和展望。
通过本文的研究,旨在为读者提供一个全面、深入的自动避障小车设计方案,为推动相关领域的发展提供有益参考。
二、系统总体设计在自动避障小车的设计中,我们采用了单片机作为核心控制器,利用其强大的数据处理能力和灵活的编程特性,实现了小车的自动避障功能。
整个系统由硬件部分和软件部分组成,其中硬件部分包括单片机、电机驱动模块、避障传感器等,软件部分则包括控制算法和程序逻辑。
硬件设计方面,我们选择了具有高性价比的STC89C52RC单片机作为核心控制器,该单片机具有高速、低功耗、大容量等特点,非常适合用于自动避障小车的控制。
电机驱动模块采用了L298N电机驱动芯片,该芯片具有驱动能力强、稳定性好等优点,能够有效地驱动小车的直流电机。
避障传感器则选用了超声波传感器,通过测量超声波发射和接收的时间差,可以计算出小车与障碍物之间的距离,为避障控制提供数据支持。
软件设计方面,我们采用了模块化编程的思想,将整个控制程序划分为多个模块,包括初始化模块、电机控制模块、避障控制模块等。
在初始化模块中,我们对单片机的各个端口进行了初始化设置,包括IO口、定时器、中断等。

基于单片机控制的智能玩具娃娃摘要:随着社会的不断进步和科学技术、经济的不断发展,人们生活水平得到很大提高,智能玩具娃娃也将会随即进入生活中,方便家长照看小孩。
本课题设计由硬件电路和软件编程的设计,通过联调,能够自动检测小孩在无家长看护的情况下,是否在指定区域内。
由于小孩睡醒后会发出哭声,能够检测小孩是否睡醒。
或在小孩睡醒后会爬行离开指定区域,娃娃会检测小孩是否在指定区域内,发出音乐提醒大人。
通过这两个功能帮助大人照看小孩能力,当在做其他事情以便及时知道小孩的情况。
本设计利用热释电红外传感器和BISS0001芯片组成红外检测电路。
红外电路功能是利用热释电红外传感器特性,检测小孩是否在指定区域内,输出信号通过CPU进行处理,实现功能。
声音检测电路利用驻极体话筒进行检测,输入符合TTL信号给单片机,单片机根据电压,判断小孩是否哭泣,并作出正确的处理。
关键词:自动检测;智能玩具娃娃;红外检测电路;驻极体话筒Based on SCM control intelligent toy dollAbstract: With the continuous progress of science and technology, economic development, people's living standards have greatly improved, and smart toys baby will also soon enter the life of the convenience of parents caring for children.The project design consists of hardware and software programming design, Through the alignment , Can automatic detection children in foster care without parents , whether in designated areas.As a child cries after waking up, able to detect whether the child woke up.Or after the child woke up crawling to leave the designated area, baby will detect whether a child in the specified area, given music to remind adults.With these two features to help adults and ability to care for children, as do other things in order to know the child's situation in a timely manner.This design uses pyroelectric infrared sensor and infrared detection circuit BISS0001 chips.infrared circuit function is the use of characteristics of pyroelectric infrared sensor to detect whether a child in the designated areas, the output signal through the CPU for processing, and function.Electret microphone sound detection circuit used for testing, enter a TTL signal to the microcontroller, microcontroller according to voltage, to determine whether a child cry, and make the right treatment.Keywords: Automatic detection; intelligent toy doll; Infrared detection electric circuit; Electret microphone目录前言 (1)第1章总体方案设计 (2)1.1设计内容及要求 (2)1.2预期成果及组成框图 (2)第2章硬件设计 (3)2.1 单片机最小系统设计 (3)2.1.1 AT89C51功能特性描述 (3)2.1.2单片机的应用 (6)2.1.3单片机最小系统 (7)2.2热释电红外电路设计 (9)2.2.1热释电红外传感器 (9)2.2.2热释电传感器的基本原理 (10)2.2.3 红外热释电处理芯片BISS0001 (11)2.2.4 BISS0001的热释电红外开关应用电路图 (14)2.3 拾音电路设计 (15)2.3.1驻极体话筒 (15)2.3.2 拾音电路 (17)2.4 语音电路设计 (21)2.4.1 语音芯片 (21)2.4.2扬声器 (21)2.4.3 语音电路 (22)第3章软件设计 (23)3.1主程序设计 (23)3.2热释电红外电路设计 (24)3.2.1软件程序部分 (24)第4章系统软硬件调试 (25)4.1硬件部分 (25)4.2软件部分 (25)4.3软硬件联调 (27)结束语 (29)参考文献 (30)致谢 (31)附录一程序清单.......................................... 错误!未定义书签。
基于51单片机居家智能灭火机器人循迹系统的设计作者:肖明俊等来源:《电子世界》2013年第13期【摘要】本系统的设计是使小车在预定轨道上按要求稳定、准确地运行,采用了单片机AT89C51单片机微处理器作为小车的检测和控制系统。
通过红外发射和接收一体探头传感器检测路面黑色循迹线,使小车按预定轨道行驶,通过步进电机扫描系统对路径进行扫描,最终实现了小车按预定轨道行驶。
【关键词】AT89C51单片机;循迹线;红外发射接收一体探头;步进电机随着科技的不断发展,安全隐患也日趋严重,怎样解决这一事态,一直是社会的一大难题。
目前市面上的一些灭火机器人在探寻路径方面,还存在一些缺陷,凭借单一的火焰传感器去寻找火源,盲目性比较突出,而且不利于进行反复探测。
本循迹系统的设计很好的解决了这一问题,采用AT89C51单片机作为微处理器,四路循迹传感器来探测路径,能及时调整电机进行反复寻找火源,具有实时性强、灵敏度高等特点。
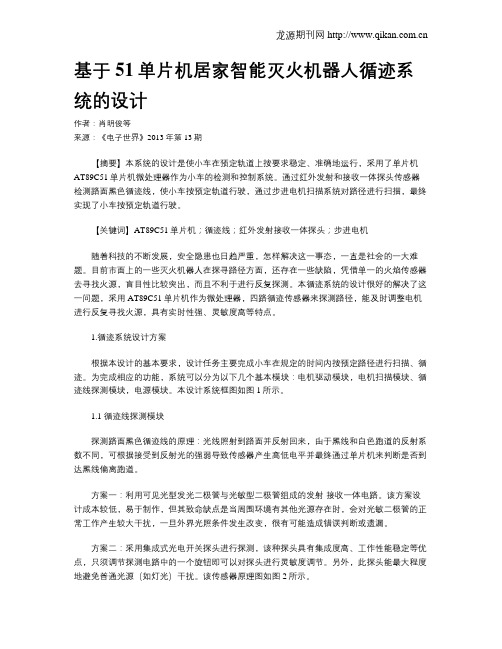
1.循迹系统设计方案根据本设计的基本要求,设计任务主要完成小车在规定的时间内按预定路径进行扫描、循迹。
为完成相应的功能,系统可以分为以下几个基本模块:电机驱动模块,电机扫描模块、循迹线探测模块,电源模块。
本设计系统框图如图1所示。
1.1 循迹线探测模块探测路面黑色循迹线的原理:光线照射到路面并反射回来,由于黑线和白色跑道的反射系数不同,可根据接受到反射光的强弱导致传感器产生高低电平并最终通过单片机来判断是否到达黑线偏离跑道。
方案一:利用可见光型发光二极管与光敏型二极管组成的发射-接收一体电路。
该方案设计成本较低,易于制作,但其致命缺点是当周围环境有其他光源存在时,会对光敏二极管的正常工作产生较大干扰,一旦外界光照条件发生改变,很有可能造成错误判断或遗漏。
方案二:采用集成式光电开关探头进行探测,该种探头具有集成度高、工作性能稳定等优点,只须调节探测电路中的一个旋钮即可以对探头进行灵敏度调节。
另外,此探头能最大程度地避免普通光源(如灯光)干扰。
计算器(Calculator)是微型电子计算机的一种特殊类型。
它与一般通用计算机的主要区别在于程序输入方式的不同。
计算器的程序一般都已经固定,只需按键输入数据和运算符号就会得出结果,很容易就能掌握。
而一般计算机的程序可以根据需要随时改动,或重新输入新的程序。
简易计算器主要用于加减乘除;科学计算器,又增添了初等函数运算(有的还带有数据总加、求平均值等统计运算)。
现代电子计算器首次问世是1963年。
那时的计算器是台式的,在美国波士顿的电子博览会上展出过。
与计算机相比,它小巧玲珑,计算迅捷,一般问题不必事先编写复杂的程序。
随着微电子技术的不断发展,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成CPU、存储器、定时器/计数器、并行和串行接口、看门狗、前置放大器、A/D转换器、D/A转换器等多种电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统。
这种技术促使机器人技术也有了突飞猛进的发展,目前人们已经完全可以设计并制造出具有某些特殊功能的简易智能机器人。
随着社会需求,计算器也从原有单一的数字加减计算演变为复杂的多种运算。
现在不在单一的在某一方面而是涉及到生活的方方面面.由于我对知识掌握的不够熟练,重点不够清楚,导致在重点与非重点处花费的时间不成比例,进度缓慢,这是设计没能全部完成的部分原因。
目前只做到按键与显示的结合(即在显示器上可以显示数字键还有命令键+-*/ =清零);加法子程序已经编写成功并严整无误,但在整体调试中未能圆满实现,本部分正在调试中。
等调试成功后,其它运算子程序的问题将迎刃而解。
引言 (1)目录 (2)1.简易计算器的设计方案 (3)1.1硬件部分设计方案 (3)1.2软件部分设计 (3)1.3 硬件设计原理图 (4)2. 简易计算器部分电路设计 (5)2.1 AT89C51常用指令 (5)2.2 显示及显示接口 (11)2.3 键盘、液晶显示的组合接口 (15)2.4 算术逻辑运算处理 (18)3.总设计电路及调试 (19)致谢 (21)参考文献 (22)1.简易计算器的设计方案1.1硬件部分设计方案1 单片机部分单片机以AT89C51来做为核心元器件。
AT89C51单片机频率计的设计摘要基于在电子领域内,频率是一种最基本的参数,并与其他许多电参量的测量方案和测量结果都有着十分密切的关系。
由于频率信号抗干扰能力强、易于传输,可以获得较高的测量精度。
因此,频率的测量就显得尤为重要,测频方法的研究越来越受到重视。
频率计作为测量仪器的一种,常称为电子计数器,它的基本功能是测量信号的频率和周期频率计的应用范围很广,它不仅应用于一般的简单仪器测量,而且还广泛应用于教学、科研、高精度仪器测量、工业控制等其它领域。
随着微电子技术和计算机技术的迅速发展,特别是单片机的出现和发展,使传统的电子侧量仪器在原理、功能、精度及自动化水平等方面都发生了巨大的变化,形成一种完全突破传统概念的新一代侧量仪器。
频率计广泛采用了高速集成电路和大规模集成电路,使仪器在小型化、耗电、可靠性等方面都发生了重大的变化。
目前,市场上有各种多功能、高精度、高频率的数字频率计,但价格不菲。
为适应实际工作的需要,本次设计给出了一种较小规模和单片机(AT89C51)相结合的频率计的设计方案,不但切实可行,而且体积小、设计简单、成本低、精度高、可测频带宽,大大降低了设计成本和实现复杂度。
频率计的硬件电路是用Ptotues绘图软件绘制而成,软件部分的单片机控制程序,是以KeilC做为开发工具用汇编语言编写而成,而频率计的实现则是选用Ptotues仿真软件来进行模拟和测试。
关键词:单片机;AT89C51;频率计;汇编语言选题的目的意义数字频率计的主要功能是测量周期信号的频率。
其基本原理就是用闸门计数的方式测量脉冲个数。
频率是单位时间( 1s )内信号发生周期变化的次数。
如果我们能在给定的 1s 时间内对信号波形计数,并将计数结果显示出来,就能读取被测信号的频率。
数字频率计首先必须获得相对稳定与准确的时间,同时将被测信号转换成幅度与波形均能被数字电路识别的脉冲信号,然后通过计数器计算这一段时间间隔内的脉冲个数,将其换算后显示出来。
单片机应用——智能循迹小车设计智能循迹小车是一种基于单片机技术的智能机器人,它可以自动跟随线路进行行驶,具有很高的应用价值,被广泛地应用在工业控制和家庭娱乐等领域。
本次智能循迹小车的设计采用的是AT89C51单片机,通过巧妙的编程和外接传感器的配合来实现小车的自动识别和跟踪线路的功能。
下面我们来具体阐述一下智能循迹小车的设计过程。
一、硬件设计智能循迹小车的硬件系统包括电机驱动电路、传感器电路、控制板电路、电源电路等几个部分。
其中,电机驱动电路是实现小车行驶的关键,它通过外接减速电机来带动小车的轮子,从而实现前进、后退、转弯等基本动作。
传感器电路则用来检测小车当前所处的位置和前方的路况,从而将这些信息传递给单片机进行处理。
控制板电路是整个硬件系统的核心部分,它包括AT89C51单片机、EEPROM存储器、逻辑电路等。
其中,AT89C51单片机是控制整个系统的“大脑”,它通过编写相应的程序来实现小车的跟踪功能。
EEPROM存储器则用来保存程序和数据,以便实现数据的长期存储。
逻辑电路则用来实现各个硬件组件之间的协调工作,从而保证整个系统的正常运转。
二、软件设计软件设计是智能循迹小车系统中最为关键的一环,它直接决定了小车的行驶效果。
为了实现小车的自动跟踪功能,我们采用了双路反馈控制系统,并在此基础上进行了进一步优化和改进。
具体来说,我们先使用PID算法对传感器采集到的数据进行处理,得到当前位置和偏差值。
然后再通过控制电机的转速和方向,使小车能够自动跟随线路前进。
三、应用价值智能循迹小车是一种非常实用的机器人,它具有很高的应用价值。
例如,在农业生产中,可以利用智能循迹小车来进行田间作业,大大提高工作效率和质量;在家庭娱乐方面,智能循迹小车可以作为一种智能玩具,为人们带来更加丰富的娱乐体验。
四、总结通过本次智能循迹小车的设计,我们不仅深入了解了单片机及传感器的原理和应用,而且具备了一定的硬件和软件开发能力。
基于AT89C51单片机设计的简易智能机器人的设计
字体:[ 大中小 ] 2007-04-19
关键词:AT89C51
引言
随着微电子技术的不断发展,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成CPU、存储器、定时器/计数器、并行和串行接口、看门狗、前置放大器、A/D转换器、D/A转换器等多种电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统。
这种技术促使机器人技术也有了突飞猛进的发展,目前人们已经完全可以设计并制造出具有某些特殊功能的简易智能机器人。
1 设计思想与总体方案
1.1 简易智能机器人的设计思想
本机器人能在任意区域内沿引导线行走,自动绕障,在有光源引导的条件下能沿光源行走。
同时,能检测埋在地下的金属片,发出声光指示信息,并能实时存储、显示检测到的断点数目以及各断点至起跑线间的距离,最后能停在指定地点,显示出整个运行过程的时间。
1.2 总体设计方案和框图
本设计以AT89C5l单片机作为检测和控制核心。
采用红外光电传感器检测路面黑线及障碍物,使用金属传感器检测路面下金属铁片,应用光电码盘测距,用光敏电阻检测、判断车库位置,利用PWM(脉宽调制)技术动态控制电动机的转动方向和转速。
通过软件编程实现机器人行进、绕障、停止的精确控制以及检测数据的存储、显示。
通过对电路的优化组合,可以最大限度地利用51单片机的全部资源。
P0口用于数码管显示,P1口用于电动机的PWM驱动控制,P2,P3口用于传感器的数据采集与中断控制。
这样做的优点是:充分利用了单片机的内部资源,降低了总体设计的成本。
该方案总体方案见图1。
2 系统的硬件组成及设计原理
此系统的硬件部分由单片机单元、传感器单元、电源单元、声光报警单元、键盘输入单元、电机控制单元和显示单元组成,如图2所示。
AT89C51
2.1 单片机单元
本系统采用AT89C51单片机作为中央处理器。
其主要任务是扫描键盘输入的信号启动机器人,在机器人行走过程中不断读取传感器采集到的数据,将得到的数据进行处理后,根据不同的情况产生占空比不同的PWM脉冲来控制电机,同时将相关数据送显示单元动态显示,产生声光报警信号。
其中,P0用于数码管动态显示,P1.0一P1.5控制2个电机,P1.6、P1.7为独立式键盘接口,P2接传感器,P3.2接计里程的光电码盘,P3.7接声光报警单元,P3.4、P3.5、P3.6接用于显示断点数目的发光二极管。
2.2 电机控制单元
本机器人采用了双电机双轮驱动的小车作为其底座。
2个电机分别独立控制其左右两边的车轮,靠两边电机的转速的不同来实现转弯功能,还可让其原地转弯,便于控制。
而传统的小车是靠动力电机和转向电机驱动,转弯角度难以控制,不便于使用。
电机控制电路采用大功率对管BDl39、BDl40组成的H型驱动电路,通过单片机产生占空比不同的PWM脉冲,精确调整电机的转速。
这种电路由于工作在晶体管饱和或截止状态,避免了在线性放大区工作时晶体管的管耗,可以最大限度地提高效率;H型电路保证了可以简单地实现电机转速和方向的控制;电子开关的速度和稳定性也完全可满足需要,整套驱动电路是一种被广泛采用的电机驱动技术。
电路见图3。
2.3 传感器单元
整个机器人共采用了9个传感器,分布在整个机器人的不同部位,相互配合起不同的作用,见图4。
图4中各传感器说明如下:
传感器1置于机器人正前方朝下的金属探测传感器,用于探测金属。
传感器2置于机器人正前方朝前的超声波传感器,用于检测障碍物。
超声波来源于555产生40 kHz的方波信号,经超声波发射头发出。
发射头不断发出信号,当遇到障碍物时,信号会被反射回来,从而接收头会接受到信号,将信号送入单片机进行相应的判断和处理。
传感器3置于机器人正前方朝下的红外光电传感器,用于检测停止线。
红外发射管发出信号,经不同的反射介质反射,根据红外接收管是否接收到信号做出相应的判断。
传感器4、5置于机器人底座下方朝下的红外光电传感器,用于检测地面的引导线,原理同传感器3。
传感器6、7置于机器人正前方朝前的光敏电阻传感器,用于寻找光源。
当机器人前方有光源照射时,光敏电阻的大小将会改变,将2个传感器的改变量进行比较处理后送入单片机,单片机将会产生相应的调整信号,使机器人朝光强的方向行走。
传感器8置于机器人后方两侧朝外的超声波传感器,用于在机器人遇到障碍物时的转弯处理,判断机器人是否完全绕开障碍物,原理同传感器2。
传感器9置于机器人正后方的光电码盘,用于计里程,借助于鼠标原理,选用直径为2.6 cm 的塑料小轮自制光电码盘,经过打磨使其周长为8 cm,再在该小轮上打等距离的8个孔,如图5所示。
最小测距精度可达到1 cm,足以满足要求,两侧装上光电传感器,将其安装在车尾,使之与车的行驶同步。
就实际情况自制出来的各个孔之间的距离无法精确相等,但经过具体测量该光电码盘,能保证行驶50 cm产生50个脉冲,于是采用其作为计算距离的基准单位。
在直道区,可由该电路产生的脉冲数,计算出铁片中心线至起跑线间的距离。
此外,为了清楚直观地观察到各传感器的工作状态,电路中还专门为每个传感器设计了工作指示灯,实时显示每个传感器的工作状态
2.4 键盘输入单元
键盘输入单元采用独立式键盘,由2个按键组成,其中一个为启动键,另一个为显示切换键,当机器人行走完全程后,按下该键,将显示整个行走过程的时间。
2.5 显示单元
显示单元由2个7段数码管组成,为了减少整个系统的功耗,采用了由单片机软件译码,动态显示,实时显示每个断点到起点的距离以及整个运行过程的时间。
2.6 声光报警单元
用555作为振荡源,用单片机触发振荡源驱动电磁讯响器作为声音指示器和1只发光二极管作为光指示装置,从而组成声光报警单元。
2.7 电源单元
本系统采用2套电源分别对电机和控制电路进行单独供电。
系统控制电路采用经7805稳压后的输出供电(5V),电机则采用4节AA电池来供电。
3 系统的软件设计
该系统配套的软件程序采用模块结构,由C语言编写完成。
主要由初始化程序、偏道调整程序、偏离光源调整程序、声光指示子程序、读传感器状态、显示程序、定时器0的中断服务程序、定时器1的中断服务程序、外部中断0的服务程序、停车处理等模块组成。
系统的主体流程如图6所示。
4 结束语
该机器人在认为设定的跑道上经过多次实验,达到了预期的效果,但是其智能化程度还远远不够。
随着人工智能和神经网络技术的不断研究和深入,智能机器人的发展前景将会越来越广阔。
共4页。