数字信号处理 第五章04
- 格式:pdf
- 大小:324.65 KB
- 文档页数:27

第五章习题与上机题5.1 已知序列12()(),0 1 , ()()()nx n a u n a x n u n u n N =<<=--,分别求它们的自相关函数,并证明二者都是偶对称的实序列。
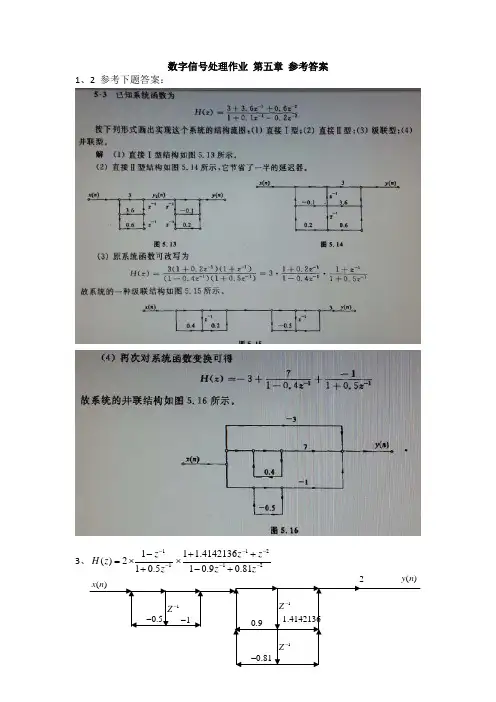
解:111()()()()()nn mx n n r m x n x n m a u n au n m ∞∞-=-∞=-∞=-=-∑∑当0m ≥时,122()1mmnx n ma r m aaa∞-===-∑ 当0m <时,122()1m mnx n a r m aaa -∞-===-∑ 所以,12()1mx ar m a =-2 ()()()()N x n u n u n N R n =--=22210121()()()()()1,0 =1,00, =()(1)x NN n n N mn N n m N r m x n x n m Rn R n m N m N m N m m Nm N m R m N ∞∞=-∞=-∞--=-=-=-=-⎧=--<<⎪⎪⎪⎪=-≤<⎨⎪⎪⎪⎪⎩-+-∑∑∑∑其他从1()x r m 和2()x r m 的表达式可以看出二者都是偶对称的实序列。
5.2 设()e()nTx n u n -=,T 为采样间隔。
求()x n 的自相关函数()x r m 。
解:解:()()()()e()e ()nTn m T x n n r m x n x n m u n u n m ∞∞---=-∞=-∞=-=-∑∑用5.1题计算1()x r m 的相同方法可得2e()1e m Tx Tr m --=-5.3 已知12()sin(2)sin(2)s s x n A f nT B f nT ππ=+,其中12,,,A B f f 均为常数。
求()x n 的自相关函数()x r m 。
解:解:()x n 可表为)()()(n v n u n x +=的形式,其中)2sin()(11s nT f A n u π=,=)(n v 22sin(2)s A f nT π,)(),(n v n u 的周期分别为 s T f N 111=,sT f N 221=,()x n 的周期N 则是21,N N 的最小公倍数。

第五章离散时间信号的数字处理Q5.1运行程序P5.1,产生连续时间序号及其抽样形式,并显示它们。
clf;t = 0:0.0005:1;f = 13;xa = cos(2*pi*f*t);subplot(2,1,1)plot(t,xa);gridxlabel('时间, msec');ylabel('振幅');title('连续时间序号 x_{a}(t)');axis([0 1 -1.2 1.2])subplot(2,1,2);T = 0.1;n = 0:T:1;xs = cos(2*pi*f*n);k = 0:length(n)-1;stem(k,xs);grid;xlabel('时间 n');ylabel('振幅');title('离散事件序号 x[n]');axis([0 (length(n)-1) -1.2 1.2])Q5.2 正弦信号的频率是多少赫兹?抽样周期是多少秒?正弦信号的频率f=13Hz,抽样周期T=0.1s。
Q5.3 解释两个axis命令的效果。
给x,y轴标刻度。
Q5.4 以比在程序P5.1中列出的抽样周期低的两个抽样周期和高的两个抽样周期的四个其他值,运行程序P5.1.评论你的结果。
T=0.04s T=0.08sT=0.15s T=0.3s由上图可以发现:当取的T越小时,得到的图形越接近原图形。
Q5.5 通过将正弦信号的频率分别变为3HZ和7HZ,重做习题Q5.1。
相应的等效离散时间信号与习题Q5.1中产生的离散时间信号之间有差别么?若没有,为什么没有?f=3Hz f=7Hz由图可以看出,变换频率得到的两个图没有区别,因为他们的抽样周期一样。
Q5.6 运行程序P5.2,产生离散时间信号x[n]及其连续时间等效ya[t],并显示它们。
clf;T = 0.1;f = 13;n = (0:T:1)';xs = cos(2*pi*f*n);t = linspace(-0.5,1.5,500)';ya = sinc((1/T)*t(:,ones(size(n))) - (1/T)*n(:,ones(size(t)))')*xs;plot(n,xs,'o',t,ya);grid;xlabel('时间, msec');ylabel('振幅');title('重构的连续时间序号 y_{a}(t)');axis([0 1 -1.2 1.2]);图1 图2Q5.7 在程序P5.2中,t的范围和时间增量的值是什么?在图中,t的范围是什么?改变t的范围,显示上述程序所计算的全范围ya[t]并再次运行程序P5.2,。
5.4 Relationship between magnitude and phaseFor SY described by rational system functions, there is some constraint between magnitude and phase.magnitude magnitudethe number of poles and zeros⎛ ⎞ 1 ⎟ jω * | H (e jω ) |2 = H (e jω )H * (e jω ) = H(e )H ⎜ jω * ⎟ ⎜ e z = e jω ⎝ ⎠ * *Explore the possible choices of system function, given the square of the magnitudeC( z) = H ( z)H (1/ z )M( )1/rrθ* 1/ ckaafinite choices for the phase finite choices for the phasephase phasethe number of poles and zeros* (1 − ck z −1 ) (1 − ck z ) ⎛ b0 ⎞ ∏ ⎛ b0 ⎞ ∏ k =1 k =1 =⎜ ⎟ N ⋅⎜ ⎟ N ⎝ a0 ⎠ (1 − d z −1 ) ⎝ a0 ⎠ (1 − d * z )Mck∏kk =1 M∏k =1kaafinite choices for the magnitude finite choices for the magnitude⎛b ⎞ =⎜ 0 ⎟ ⎝ a0 ⎠2∏ (1 − c zk k =1 N k k =1−1)(1 − c z )* k * )(1 − d k z )∏ (1 − d z−1zeros: poles:* ck ,1/ ck* d k ,1 / d kOccur in conjugate Occur in conjugate reciprocal pairs reciprocal pairsExample 5.112(1 − z−1 )(1+ 0.5z −1 ) H1 ( z) = (1− 0.8e jπ / 4 z−1 )(1− 0.8e− jπ / 4 z −1)Geometric explanation(1− z−1)(1+ 2z−1) H2 ( z) = (1− 0.8e jπ / 4 z−1)(1− 0.8e− jπ / 4 z−1)z = e jωv1v3z = e jωv4−0.5w4−2w1w3w2v2− 0.5−2| H1 (e jω ) |= K1v3 v4 v1 v2Z2z = e jωw4| H2 (e jω ) |= K2θv4Z1ωw3 w4 w1 w2C1(z)C2 ( z)−2 − 0.5* C2 ( z) = H2 ( z)H2 (1/ z* )C1 ( z) = H1 ( z)H1* (1/ z* )r1/ r| H1 (e jω ) | K1 v4 K1 = ⋅ = ⋅ r — constant | H 2 (e jω ) | K 2 w4 K2C1 ( z ) = C2 ( z )| H1 (e jω ) |2 =| H 2 (e jω ) |2形状相同 形状相同So, | H1 (e jω ) |=| H 2 (e jω ) |, butH1 (e jω ) ≠ H 2 (e jω )Example 5.12C(z) = H(z)H* (1/ z* )how? how?H1(z) :{Z 1 , Z 2 } , Z 3z1H 2 ( z) :{Z1 , Z 2 } , Z 6z1 p1j Im(z)p1z3 p2 p3determine the zeros and poles to associate with H(z) H(z): causal and stable SY H(z): causal and stable SY Poles of H(z): P, P , P 1 2 3 Let H(z) be real SY, Let H(z) be real SY,Re (z)p3z6z2 p2z2H 1 ( e jω ) = H 2 ( e jω )H 3 ( z) :z4 p1{Z 4 , Z 5 } , Z 3H 4 ( z) :z4{Z 4 , Z 5 } , Z 6p1H 3 ( e jω ) = H 4 ( e j ω ){Z1, Z2} or {Z4 , Z5} , {Z3} or {Z6}p3z3 p2p3p2z5z6zeros and poles either are real or zeros and poles either are real or occur in complex conjugate pairs. occur in complex conjugate pairs.z5=(constant=1)=1If the number of poles and zeros of H(z) is unspecified, then, the number of choices for H(z) would be unlimited.j Im(z)Summary1) zeros and poles of H(z)expand ⎧H1(z)p1z3 p2Re (z)z1C1 ( z)1⎫ ⎧ 1⎫ ⎨ck , * ⎬ , ⎨ d k , * ⎬ ⎩ ck ⎭ ⎩ d k ⎭p3z21 a*C(z) z =ejω| H(ejω )|2⎧ H (z): c1k , d1k 2) Let ⎨ 1 , if ⎩H2 (z): c2k , d2k 3) C(z) = H(z)H* (1/ z* )* 1 = A —constant ⎧ c1k =1/ c2k ⎪ , then ⎨| H2 (e jω ) | ⎨ * d1k =1/ d2k ⎪ H (e jω ) ≠ H (e jω ) ⎩ ⎩ 1 2aj Im(z)⎧ | H (e jω ) |1 a*z1 ap1z3 p2Re (z)H ( z ) = H1 ( z ) ⋅z −1 − a* 1 − az −1p3z2C ( z)N* z−1 − ak In general, if H(z) = H1(z) ⋅ ∏ , then C( z) = C1 ( z) −1 k =1 1− ak zthe number of poles and zerosCausal and stable H(z), not unique, same magnitude5.5 All-pass systemsDefinition: | H (e ) |= 1jω2) General AP-SY:H ap ( z ) = A∏* z −1 − a k ——N th-order AP-SY Let −1 k =1 1 − ak z * 1/ ak conjugate reciprocal pairs ak Na = re jθ— all-pass system (AP-SY)H ap ( z ) = z −1 − a * 1 − az −11) AP factor (First-order AP-SY):1 a*zeros: poles:H ap (e jω ) = AN ⎛ ⎡ r sin(ω − θ k ) ⎤ ⎞ H ap (e jω ) = ∑ ⎜ −ω − 2 arctan ⎢ ⎥⎟ ⎜ ⎟ k =1 ⎝ ⎣1 − r cos(ω − θ k ) ⎦ ⎠ For real Nth-order AP-SYazero: 1/ a pole: a*conjugate reciprocal pairH ap (e jω ) = 1⎡ r sin(ω − θ ) ⎤ jθ H ap (e jω ) = −ω − 2 arctan ⎢ ⎥ (Let a = re ) ⎣1 − r cos(ω − θ ) ⎦H ap ( z ) = A ⋅ ∏* z −1 − d k M c ( z −1 − ek )( z −1 − ek ) ( N = M r + 2M c ) ⋅ −1 ∏ −1 * −1 k =1 1 − d k z k =1 (1 − ek z )(1 − ek z ) Mrreal poles/zeros complex conjugate poles/zerosPropertiesThe zeros and poles occurs in conjugate reciprocal pairs. For a stable and causal AP-SY, the group delay is always positive, and the continuous phase is always nonpositive for 0 < ω < π.grd [ H ap (e jω )] > 0 arg[ H ap (e )] ≤ 0, 0 < ω < πjωExample: a second-order and real AP-SY.H ap ( z ) = ( z −1 − a * ) ( z −1 − a ) ⋅ (1 − az −1 ) (1 − a * z −1 )conjugate reciprocal pairsa∗Leta = re jθ1zeros: 1/ a * , 1/ a poles: a,H ap (e jω ) = 1a*a*a1a⎡ r sin(ω − θ ) ⎤ ⎡ r sin(ω + θ ) ⎤ Hap (e jω ) = −2ω − 2arctan ⎢ ⎥ − 2arctan ⎢1− r cos(ω + θ ) ⎥ ⎣1 − r cos(ω −θ ) ⎦ ⎣ ⎦2ApplicationsAny rational system can be expressed as: H(z) = Hmin(z)Hap(z) Used as compensators for phase (group-delay) distortion (相位失真的补偿器)H d ( z ) :非线性相位系统H ap ( z ):全通系统线性相位Example. Transform an unstable SY into stable SY by cascading a AP-SY1 d*1 d*H ( z ) = H d ( z ) H ap ( z )幅度关系:?×H ( z)d=H s ( z)dH (e jω ) = H d (e jω )H ap ( z )相位关系: ϕ (ω ) = ϕ d (ω ) + ϕ ap (ω )τ 群延迟关系: (ω ) = τ d (ω ) + τ ap (ω )要使H(z)具有线性相位,只需构造 τ ap (ω ) ,使H s ( z ) = H ( z ) H ap ( z )H s (e ) = H (e )jω jω—— stableτ (ω ) = τ d (ω ) + τ ap (ω ) = τ 0 (常数)Homework5.4, 5.6, 5.8, 5.24, 5.363。
————第五章————数字滤波网络5.1 学 习 要 点本章主要介绍数字滤波器的系统函数()z H 与其网络结构流图之间的相互转换方法,二者之间的转换关系用Masson 公式描述。
由于信号流图的基本概念及Masson 公式已在信号与系统分析课程中讲过,所以下面归纳IIR 系统和FIR 系统的各种网络结构及其特点。
5.1.1 IIR 系统的基本网络结构1. 直接型结构如果将系统函数()z H 化为标准形式(5.1)式:()∑∑=-=--=Nk kkMk kkz az bz H 11 (5.1) 则可根据Masson 公式直接画出()z H 的直接II 型网络结构流图如图5.1所示(取N=4,M=3)。
二阶直接II 型网络结构最有用,它是级联型和并联型网络结构的基本网络单元。
优点:可直接由标准形式(5.1)或差分方程()()()∑∑==-+-=Mk kN k kk n x b k n y a n y 01画出网络结构流图,简单直观。
缺点:对于高阶系统:(1)调整零、极点困难;(2)对系数量化效应敏感度高;(3)乘法运算量化误差在系统输出端的噪声功率最大。
2. 级联型结构将(5.1)式描述的系统函数()z H 分解成多个二阶子系统函数的乘积形式()()()()z H z H z H z H m 21⋅= (5.2) (),1221122110------++=zzzzz H i i i i i i ααβββ m i ,,2,1 = (5.3)画出的级联型方框图如图5.2所示。
图中每一个子系统均为二阶直接型结构,根据()z H 的具体表达式确定()z H i 的系数i i i i 1210,,,αβββ和i 2α后,可画出()z H i 的网络结构流图如图5.3所示。
优点:(1)系统结构组成灵活;(2)调整零、极点容易,因为每一级二阶子系统()z H i 独立地确定一对共轭零点和一对共轭极点;(3)对系数量化效应敏感度低。