数字信号处理-答案第五章
- 格式:pdf
- 大小:299.14 KB
- 文档页数:14
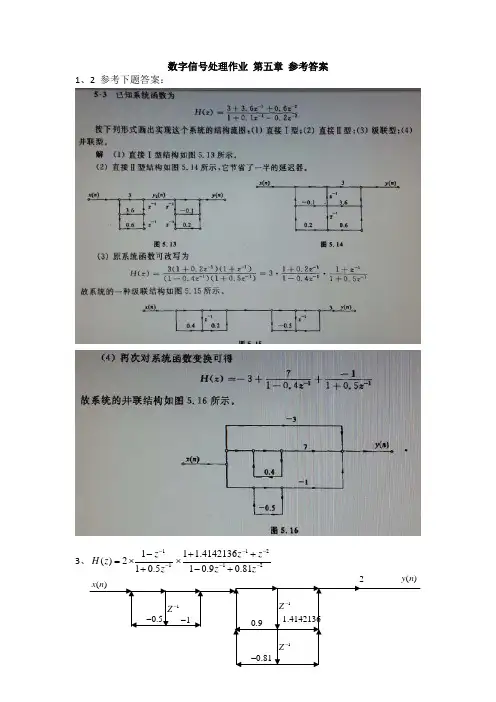
数字信号处理第5章答案史林赵树杰编著第五章练习题答案%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%5.8 已知复序列()()()f n x n jy n =+的8点DFT 为()[()](07)F k DFTf n k =≤≤,其值为(0)13,(1)24,(2)37,(3)45,(4)25,(5)12,(6)48,(7)6,F j F j F j F j F j F j F j F j =-=-+=+=--=+=--=-=不计算()F k 的离散傅里叶逆变换(IFFT ),试求实序列()x n 和()y n 的8点DFT ()X k 和()Y k 。
解:利用DFT 的共轭对称性()()()f n x n jy n =+[]()()()()F k DFT f n X k jY k ==+[]Re ()()()f n Fep k x n ??[]Im ()()()j f n Fop k y n ??所以[][]*()()R e ()()1(())(())()2N N N X k D FT x n D FT f n Fep k F k F N k R k ??====+-?[][]*1()()Im ()()1(())(())()2N N N Y k D FT y n D FT f n Fep k j F k F N k R k j ??====--?%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%5.9 设()x n 和()y n 是长度为N 的两个实序列。
已知()[()](01)X k DFT x n k N =≤≤-,()[()](01)Y k DFT y n k N =≤≤-。
现在希望根据()X k 和()Y k 求()x n 和()y n ,为了提高运算效率,试设计一种算法,用一次N 点IFFT 来完成。

第五章习题与上机题5.1 已知序列12()(),0 1 , ()()()nx n a u n a x n u n u n N =<<=--,分别求它们的自相关函数,并证明二者都是偶对称的实序列。
解:111()()()()()nn mx n n r m x n x n m a u n au n m ∞∞-=-∞=-∞=-=-∑∑当0m ≥时,122()1mmnx n ma r m aaa∞-===-∑ 当0m <时,122()1m mnx n a r m aaa -∞-===-∑ 所以,12()1mx ar m a =-2 ()()()()N x n u n u n N R n =--=22210121()()()()()1,0 =1,00, =()(1)x NN n n N mn N n m N r m x n x n m Rn R n m N m N m N m m Nm N m R m N ∞∞=-∞=-∞--=-=-=-=-⎧=--<<⎪⎪⎪⎪=-≤<⎨⎪⎪⎪⎪⎩-+-∑∑∑∑其他从1()x r m 和2()x r m 的表达式可以看出二者都是偶对称的实序列。
5.2 设()e()nTx n u n -=,T 为采样间隔。
求()x n 的自相关函数()x r m 。
解:解:()()()()e()e ()nTn m T x n n r m x n x n m u n u n m ∞∞---=-∞=-∞=-=-∑∑用5.1题计算1()x r m 的相同方法可得2e()1e m Tx Tr m --=-5.3 已知12()sin(2)sin(2)s s x n A f nT B f nT ππ=+,其中12,,,A B f f 均为常数。
求()x n 的自相关函数()x r m 。
解:解:()x n 可表为)()()(n v n u n x +=的形式,其中)2sin()(11s nT f A n u π=,=)(n v 22sin(2)s A f nT π,)(),(n v n u 的周期分别为 s T f N 111=,sT f N 221=,()x n 的周期N 则是21,N N 的最小公倍数。
数字信号处理(Digital Signal Processing)智慧树知到课后章节答案2023年下聊城大学聊城大学绪论单元测试1.声音、图像信号都是()。
A:二维信号 B:一维信号 C:确定信号 D:随机信号答案:随机信号第一章测试1.序列的周期为()。
A:7 B:7 C:14 D:14答案:142.序列的周期为()。
A:10 B:10 C:8 D:8答案:103.对于一个系统而言,如果对于任意时刻n0,系统在该时刻的响应仅取决于此时刻及此时刻以前时刻的输入系统,则称该系统为____系统。
()A:线性 B:因果 C:稳定 D:非线性答案:因果4.线性移不变系统是因果系统的充分必要条件是______。
()A:n<0,h(n)=0 B:n>0,h(n)=0 C:n>0,h(n)>0 D:n<0,h(n)>0答案:n<0,h(n)=05.要想抽样后能够不失真的还原出原信号,则抽样频率必须,这就是奈奎斯特抽样定理。
()A:等于2倍fm B:小于等于2倍fm C:大于2倍fm D:大于等于2倍fm答案:大于等于2倍fm6.已知x(n)=δ(n),其N点的DFT[x(n)]=X(k),则X(N-1)= 1。
()A:对 B:错答案:对7.相同的Z变换表达式一定对应相同的时间序列。
()A:对 B:错答案:错8.滤波器设计本质上是用一个关于z的有理函数在单位圆上的特性来逼近所有要求的系统频率特性。
()A:错 B:对答案:对9.下面描述中最适合离散傅立叶变换DFT的是()A:时域为离散周期序列,频域也为离散周期序列 B:时域为离散有限长序列,频域也为离散有限长序列 C:时域为离散序列,频域也为离散序列 D:时域为离散无限长序列,频域为连续周期信号答案:时域为离散有限长序列,频域也为离散有限长序列10.巴特沃思滤波器的幅度特性必在一个频带中(通带或阻带)具有等波纹特性。
()A:错 B:对答案:错第二章测试1.N=1024点的DFT,需要复数相乘次数约()。

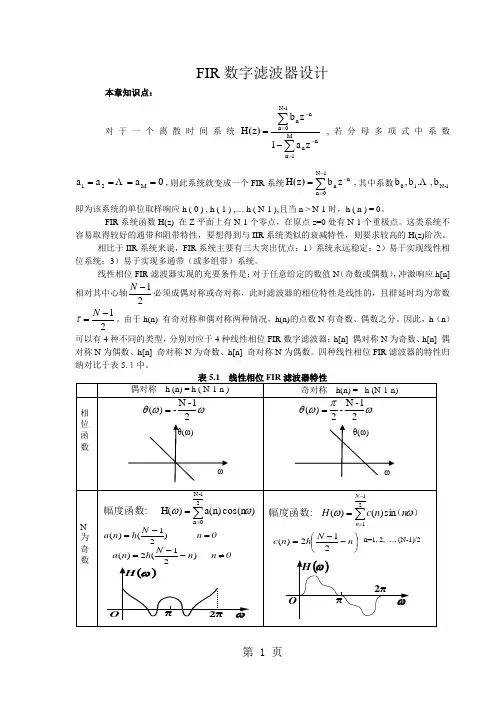
FIR 数字滤波器设计本章知识点:对于一个离散时间系统∑∑=-=--=M 1n nn 1-N 0n nnz a 1z bz H )(,若分母多项式中系数0a a a M 21====Λ,则此系统就变成一个FIR 系统∑-=-=1N 0n nn z b z H )(,其中系数1-N 10b ,.b ,b Λ即为该系统的单位取样响应h ( 0 ) , h ( 1 ) ,… h ( N-1 ),且当n > N-1时,h ( n ) = 0。
FIR 系统函数H(z) 在Z 平面上有N-1个零点,在原点z=0处有N-1个重极点。
这类系统不容易取得较好的通带和阻带特性,要想得到与IIR 系统类似的衰减特性,则要求较高的H(z)阶次。
相比于IIR 系统来说,FIR 系统主要有三大突出优点:1)系统永远稳定;2)易于实现线性相位系统;3)易于实现多通带(或多组带)系统。
线性相位FIR 滤波器实现的充要条件是:对于任意给定的数值N (奇数或偶数),冲激响应h[n] 相对其中心轴21-N 必须成偶对称或奇对称,此时滤波器的相位特性是线性的,且群延时均为常数 21-=N τ。
由于h(n) 有奇对称和偶对称两种情况,h(n)的点数N 有奇数、偶数之分。
因此,h (n )可以有4种不同的类型,分别对应于4种线性相位FIR 数字滤波器:h[n] 偶对称N 为奇数、h[n] 偶对称N 为偶数、h[n] 奇对称N 为奇数、h[n] 奇对称N 为偶数。
四种线性相位FIR 滤波器的特性归纳对比于表5.1中。
一.FIR DF 设计方法FIR DF 的设计实现不能像IIR DF 设计那样借助于模拟滤波器的设计方法来实现,其设计方法主要是建立在对理想滤波器频率特性进行不同程度逼近的基础上,主要的逼近方法有三种:窗函数法;频率抽样法;最佳一致逼近法。
1. 窗函数法窗函数法是设计FIR 滤波器的最直接方法,它通过采用不同时宽的窗函数,对理想滤波器的无限长冲激响应h d (n)进行截短,从而得到系统的有限长冲激响应 h (n),这一过程可用式5-1来描述:,021-N ||,(n)h )()()(d ⎪⎩⎪⎨⎧≤=其它= n n w n h n h R d (5.1)其中W R (n)是时宽为N 的窗函数。
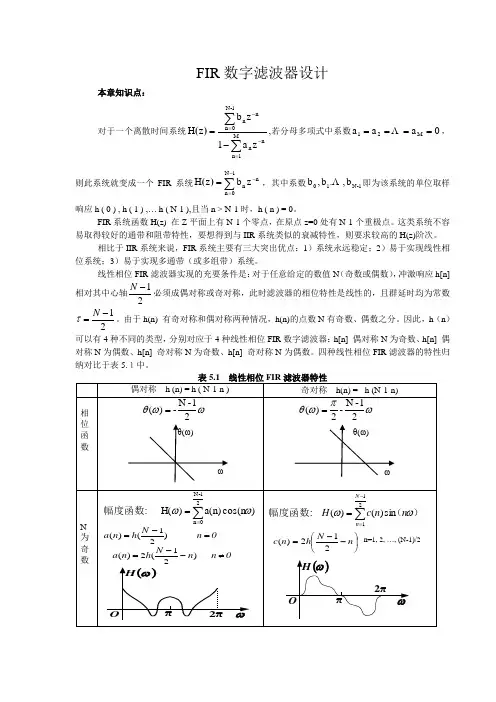
FIR 数字滤波器设计本章知识点:对于一个离散时间系统∑∑=-=--=M 1n nn 1-N 0n nnz a 1z bz H )(,若分母多项式中系数0a a a M 21==== ,则此系统就变成一个FIR 系统∑-=-=1N 0n n nz bz H )(,其中系数1-N 10b ,.b ,b 即为该系统的单位取样响应h ( 0 ) , h ( 1 ) ,… h ( N-1 ),且当n > N-1时,h ( n ) = 0。
FIR 系统函数H(z) 在Z 平面上有N-1个零点,在原点z=0处有N-1个重极点。
这类系统不容易取得较好的通带和阻带特性,要想得到与IIR 系统类似的衰减特性,则要求较高的H(z)阶次。
相比于IIR 系统来说,FIR 系统主要有三大突出优点:1)系统永远稳定;2)易于实现线性相位系统;3)易于实现多通带(或多组带)系统。
线性相位FIR 滤波器实现的充要条件是:对于任意给定的数值N (奇数或偶数),冲激响应h[n] 相对其中心轴21-N 必须成偶对称或奇对称,此时滤波器的相位特性是线性的,且群延时均为常数 21-=N τ。
由于h(n) 有奇对称和偶对称两种情况,h(n)的点数N 有奇数、偶数之分。
因此,h (n )可以有4种不同的类型,分别对应于4种线性相位FIR 数字滤波器:h[n] 偶对称N 为奇数、h[n] 偶对称N 为偶数、h[n] 奇对称N 为奇数、h[n] 奇对称N 为偶数。
四种线性相位FIR 滤波器的特性归纳对比于表5.1中。
一.FIR DF 设计方法FIR DF 的设计实现不能像IIR DF 设计那样借助于模拟滤波器的设计方法来实现,其设计方法主要是建立在对理想滤波器频率特性进行不同程度逼近的基础上,主要的逼近方法有三种:窗函数法;频率抽样法;最佳一致逼近法。
1. 窗函数法窗函数法是设计FIR 滤波器的最直接方法,它通过采用不同时宽的窗函数,对理想滤波器的无限长冲激响应h d (n)进行截短,从而得到系统的有限长冲激响应 h (n),这一过程可用式5-1来描述:,021-N ||,(n)h )()()(d ⎪⎩⎪⎨⎧≤=其它= nn w n h n h R d (5.1)其中W R (n)是时宽为N 的窗函数。

第五章 数字滤波器的基本结构1。
用直接I 型及典范型结构实现以下系统函数21214.06.028.02.43)(-----+++=z z z z z H分析:①注意系统函数H(z)分母的 0z 项的系数应该化简为1。
②分母), 2 , 1( ••••••=-i z i 的系数取负号,即为反馈链的系数。
解:21212.03.014.01.25.1)(-----+++=z z z z z H )2.03.0(14.01.25.12121----+--++=z z z z ∵)()(1)(1z X z Y z a zb z H Nn nn Mm mn=-=∑∑=-=- ∴3.01-=a ,2.02=a5.10=b ,1.21=b ,4.02=b2。
用级联型结构实现以下系统函数)8.09.0)(5.0()14.1)(1(4)(22++-+-+=z z z z z z z H 试问一共能构成几种级联型网络。
分析:用二阶基本节的级联来表达(某些节可能是一阶的)。
解: ∏------++=k k k k k z zz z A z H 2211221111)(ααββ )8.09.01)(5.01()4.11)(1(4211211------++-+-+=z z z z z z ∴ 4=A8.0 ,9.0 , 0,5.0 1,4.1 , 0 ,1 2212211122122111-=-====-===ααααββββ由此可得:采用二阶节实现,还考虑分子分母组合成二阶(一阶)基本节的方式,则有四种实现形式.3。
给出以下系统函数的并联型实现。
)8.09.01)(5.01(6.141.158.12.5)(211321------++--++=z z z z z z z H 分析:注意并联的基本二阶节和级联的基本二阶节是不一样的,这是因为系统函数化为部分分式之和,分子的1-z 的最高阶数比分母1-z 的最高阶数要低一阶,如果分子、分母多项式的1-z 的最高阶数相同,则必然会分解出一个常数项的相加(并联)因子。
5-1 An AM broadcast transmitter is tested by feeding the RF output into a 50-Ω (dummy) load. Tone modulation is applied. The carrier frequency is 850 kHz and the FCC licensed power output is 5,000 W. The sinusoidal tone of 1,000 Hz is set for 90% modulation.(a) Evaluate the FCC power in dBk (dB above 1 kW) units.(b) Write an equation for the voltage that appears across the 50-Ω load, giving numerical values for all constants.(c) Sketch the spectrum of this voltage as it would appear on a calibrated spectrum analyzer.(d) What is the average power that is being dissipated in the dummy load? (e) What is the peak envelope power? Solution :(a) FCC power:500010lg 6.99()1000dBK ⎛⎫= ⎪⎝⎭()()()():c o s 20001000900.9501cos m m m c c b Let m t A t f H z A s t A m t tπω==→=∴Ω=+⎡⎤⎣⎦是%调制负载上通过的电压为:()707[10.9 cos (2000)]cos[2850,000]s t t t ππ=+(c)])cos[(2)707(9.0])cos[(2)707(9.0cos 707)(t t t t s m c m c c ωωωωω++-+=212500050c A =707c A V=(d)50Ω负载上的平均功率:()222A V G real 210.921505020.95000170252c A st P w<>⎡⎤==+⎢⎥⎣⎦⎡⎤=+=⎢⎥⎣⎦(e) (){}[]222PEP P 1max 500010.918050250cA m t w =+=⨯+=⎡⎤⎣⎦⨯5-2 An AM transmitter is modulated with an audio testing signal given by()120.2sin 0.5cos m t t t ωω=+, where 1500f Hz =,2f =,and 100c A =.Assume that the AM signal is fed into a 50Ω load. (a) Sketch the AM waveform. (b) What is the modulation percentage?(c) Evaluate and sketch the spectrum of the AM waveform. Solution: ()()12100(10.2sin 0.5cos )cos c a s t t t t ωωω=++2222221110.9()()12222c c cs t A A m t A ⎡⎤<>=+<>=+⎢⎥⎣⎦5-4 Assume that an AM transmitter is modulated with a video testing signal given by ()10.20.6sin m t t ω=-+,where f 1=3.57MHz. Let A c =100. (a) Sketch the AM waveform.(b) What are the percentages of positive and negative modulation? (c) Evaluate and sketch the spectrum of the AM waveform about f c .Solution:()()()()()()1110.20.6sin 3.57;1001001cos 1000.80.6sin cos m c c c a m t t f f M H zA s t m t t t tωωωω=-+====+=+()m ax m in140100%pos.m od.40%10010020%neg.m od.80%100ccc cA A b A A A A --===--===()()()()()04015c c m c m c f Sff f j f f f f f f δδδ>=------+⎡⎤⎣⎦5-5 A 50,000-W AM broadcast transmitter is being evaluated by means of a two-tonetest.The transmitteris connected to a 50-Ω load, and()1111cos cos 2m t A t A t ωω=+, where f 1=500 Hz. Assume that a perfect AMsignal is generated.(a) Evaluate the complex envelope for the AM signal in terms of A 1 and ω1. (b) Determine the value of A 1 for 90% modulation.(c) Find the values for the peak current and average current into the 50-Ω load for the 90% modulation case. Solution:(a))]2cos (cos 1[2236)](1[)(V2236)50(2000,501112t t A t m A t g A A C c cωω++=+==⇒=(b)()1111111cos 2c c os 2os []cos A t t m t A t A t ωωωω=++=to find [m (t )]min : x (θ) = cos θ +cos2θ()sin 2sin 20dx d θθθθ=--=sin 4sin cos θθθ-=125.1)5.104(5.104-=︒︒=x θ()()()111min 104.51.12min 0.905.8om t A m A x At -=→=⎡==-⎡⎤⎣⎤⎣⎦⎦m ax 1M I N 1m ax m in112236[12]2236[1 1.125]3.1250.900.57622cA A A A A A A A A =+=--==⇒=另解:(c)m ax m ax m ax m ps1112236[12(0.8)]5813.6volts116.272 50()2236[10.8(cos cos 2)]cos 0 Av c c A A I A I s t t t tfor ωωωωω=+=====++⋅=>>m ax m ax m ax m ps1112236[12(0.576)]4811.9volts96.238 50()2236[10.576(cos cos 2)]cos 0 c c A A I A s t t t tfor ωωωωω=+====++⋅=>>另解:∴ mps A 0I Av =5-12 SSB signals can be generated by the phasing method shown in Fig. 5-5a, by the filter method, of Fig. 5-5b, or by the use of Weaver ’s method [Weaver, 1956], as shown in Fig. P5-12. For Weaver ’s method (Fig. P5-12), where B is the bandwidth of m (t ),(a) Find a mathematical expression that describes the waveform out of each block on the block diagram.(b) Show that s (t) is an SSB signal.Figure P5-12 Weaver ’s method for generating SSB.Solution:)cos(212cos )(1Bt t B t V ππ=⎪⎪⎭⎫⎝⎛⎪⎭⎫ ⎝⎛=⎥⎦⎤⎢⎣⎡++-=↔==)21()21(21)()cos()()()()(313B f M B f M f V Bt t m t V t m t V π⎥⎦⎤⎢⎣⎡++--=↔==)21()21(21)()sin()()()()(424B f M B f M j f V Bt t m t V t m t V π⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧<⎥⎦⎤⎢⎣⎡++-=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧<=elsewhere ,021||,)21()21(21elsewhere f ,021|| ),()(45f Bf B f M B f M B f f V f VLikewise ⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧<⎥⎦⎤⎢⎣⎡++--=elsewhere ,021||,)21()21(21)(6f B f B f M B f M f V ⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+=t B f t v t V c 212cos )()(59π⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧<++⎥⎦⎤⎢⎣⎡++++-++<--⎥⎦⎤⎢⎣⎡+--+---=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+++⎪⎭⎫ ⎝⎛--=⇒elsewhere 21|21|,0,)2121()2121(21|21|,)2121()2121(41 212121)(559f B B f f B B f f M B B f f M B B f f B B f f M B B f f M B f f V B f f V f V c c c c c c c ccc c c c c c c c c f f B f B B f f B f f f B B f f B B f BB f f B B B f f -<<--⇒<+++<<⇒++<<-+⇒<--<-⇒<--21|21| Likemise 21212121 21212121|21:|AsideThus,[][]⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧-<<--+++++<<-+--=elsewhere ,0,)()(41,)()(41)(9f f f B f B f f M f f M B f f f f f M B f f M f V c c c c c c c cLikewise⎪⎪⎪⎭⎪⎪⎪⎬⎫⎪⎪⎪⎩⎪⎪⎪⎨⎧<++⎥⎦⎤⎢⎣⎡+++--++<--⎥⎦⎤⎢⎣⎡+--+----=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+++⎪⎭⎫ ⎝⎛---=elsewhere 21|21|,0,)2121()2121(4121|21|,)2121()2121(41212121)(6610f BB f f B B f f M B B f f M B B f f B B f f M B B f f M B f f V B f f V j f V c c c c c c c c[][]⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧-<<--++-++<<-+---⇒elsewhere ,0,)()(41,)()(41)(10f f f B f B f f M f f M B f f f f f M B f f M f V c c c c c c c cputout=s(t) = v 9(t)+v 10(t ))()()(109f V f V f s +=⇒5-13 An SSB-AM transmitter is modulated with a sinusoid ()15cos m t t ω=, where1112,500,and 1c f f Hz A ωπ===. (a) Evaluate ()ˆmt . (b) Find the expression for a lower SSB signal.cc c f c -S(t) is a USSB signal⇒ USSBf f f B f f f M B f f f f f M f S c c c c c c =⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧-<<--++<<-=⇒elsewhere ,0),(21),(21)((c) Find the rms value of the SSB signal. (d) Find the peak value of the SSB signal.(e) Find the n ormalized average power of the SSB signal. (e) Find the normalized PEP of the SSB signal. Solution:()()1ˆ5sin a mt t ω= ()()()()()111ˆcos sin 5cos cos 5sin sin 5cos c c c c c b s t m t t mt t t t t t tωωωωωωωω=+=+=-()()15cos c s t t ωω=-()()22552rms c st V <>=→==()5P d V V =()()2252e st w <>=()252P E P f P w =5-18 A phasing-type SSB-AM detector is shown in Fig. P5-18. This circuit is attached to the IF out-put of a conventional superheterodyne receiver to provide SSB reception.(a) Determine whether the detector is sensitive to LSSB or USSB signals. How would the detector be changed to receive SSB signals with the opposite type of sidebands?(b) Assume that the signal at point A is a USSB signal with f c = 455 kHz. Find the mathematical expressions for the signals at points B through I . (c) Repeat part (b) for the case of an LSSB-AM signal at point A .(d) Discuss the IF and LP filter requirements if the SSB signal at point A has a3-kHz bandwidth.Figure P5-18Solution: (a)ˆ()()cos ()sin ''''A c c s t m t t m t t U SSBL SSBωω=-→+→()cos D c s t t ω=2ˆ()()()()cos ()sin cos ˆ()()(1cos 2)sin 222B A D c c c c c s t s t s t m t t mt t t m t m t t tωωωωω===+()()2c m t s t =()sin E c s t t ω=2()()()ˆ()sin cos ()sin ˆ()()sin 2(1cos 2)22F A E c c c c c s t s t s t m t t t m t t m t m t t t ωωωωω===-ˆ()()2G m t s t =()()()2H m t s t =-I :()()()()()()22,(),I c H m t m t s t s t s t U SSB m t LSSB=-=+⎧=⎨⎩To receive USSB signals, Additive V H (t ) from V C (t) at the summer.CHI(b) see part (a.) (c) see part (a.)(d) IF should be cantered atf c ±1.5 kH z,LSSBU SSBhave 3kHz BW and as small aroll-off factor as is economically feasible. LPF should have 3 kHz BW and as small a roll-off factor as is feasible, also.5-20 A modulated signal is described by the equations (t )=10 cos[(2π⨯108)t+10 cos (2π⨯103t )] Find each of the following: (a) Percentage of AM.(b) Normalized power of the modulated signal. (c) Maximum phase deviation. (d) Maximum frequency deviation. Solution: (a) ma xm i nc A AA ==0% A M∴ (b) W 502/10/2/22norm ===c A P()()()()()()310cos 2102210101502j tj t c org t e A eg t st g t wπθ===∴<>=<>=(c) m ax 10 radions θ∆=(d)kHz10102)2000(102)2000sin()2000(10)()(4===∆=∆-==πππωππθωd d F t dt t d t5-23 A MF signal has sinusoidal modulation with a frequency of f m =15KHzand modulation index of 2.0β=.(a) Find the transmission bandwidth by using carson ’s rule.(b)What percentage of the total FM signal power lies within the carson rule bandwidth?Solution:().cos 22(1)231590m m T m a m t A f tB f KHzπβ==+=⨯⨯=()()()()012320.223920.576720.352820.1289J J J J ====在卡森带宽内取了三次边频:()()()()()()()()2222222201232222201231111222222222.122222299.75%c c c c c A J A J A J A J b A J J J J ⎡⎤+⨯++⎢⎥⎣⎦∴⎡⎤=+⨯++=⎣⎦5-26 A modulated RF waveform is given by []1500cos 20cos c t t ωω+, where1112,1,100c f f K H z and f M H z ωπ===.(a) If the phase deviation constant is 100 rad/V , find the mathematical expression for the corresponding phase modulation voltage ()m t . What is the peak value and its frequency?(b) If the frequency deviation constant is 6110/rad V s ⨯⋅, find the mathematical expression for the corresponding FM voltage ()m t . What is the peak value and its frequency?(c)If the RF waveform appears across a 50Ω load, determine the average powerand the PEP.Solution:.:a PM.:b FM()22150012522s c RF P A KW ===波形的规一化功率:()12500025005050s real PEP P P W P Ω====通过50负载后:5-46 A digital baseband signal consisting of rectangular binary pulses occurring at a rate of 24 kbits/s is to be transmitted over a bandpass channel.(a) Evaluate the magnitude spectrum for OOK signaling that is keyed by a baseband digital test pattern consisting of alternating 1’s and 0’s.(b) Sketch the magnitude spectrum and indicate the value of the first null-to-null bandwidth . Assume a carrier frequency of 150 MHz.(c) For a random data pattern, find the PSD and plot the result. Compare this1()cos[()]500cos[20cos ]100()20cos 210001()cos 210005c c c P S t A t D m t t t m t tm t tωωωππ=+=+∴==[]()166()cos[()]500cos[20cos ]10()20cos 2100020()sin 2100021000104sin 21000100t c c c f t S t A t D m t dt t t m t dt t m t t tωωωπππππ-∞-∞=+=+∴==-=-⎰⎰result with that obtained in parts (a) and (b) for alternating data. Solution:(a) Evaluate the magnitude spectrum for OOK signaling that is keyed by a baseband digital test pattern consisting of alternating 1’s and 0’s.()()cos c c s t A m t t ω= , m (t )为单极性 OOK : ()()c g t A m t =0000000/4/4/4/4/2/20000()1sin(/2)2/2/2sin(/2)()()() 2/211 w here:22jn tn n T jn tT jn tc n c T T jn jn c c cn n n bg t C eA eC A edt T T jn A A e en T jn T n A n G f C f nf f nf n R f T T ωωωππωππππδδπ∞=-∞-----∞∞=-∞=-∞===⋅--==-⎡⎤=-=-⎢⎥⎣⎦===∑⎰∑∑*1()[()()]2c c S f G f f G f f =-+--(b) Sketch the magnitude spectrum and indicate the value of the first null-to-null bandwidth. Assume a carrier frequency of 150 MHz.48null B K H z =(c) For a random data pattern, find the PSD and plot the result. Compare this result with that obtained in parts (a) and (b) for alternating data.48null B K H z =The null-to-null bandwidth is the same for both (b) and (c). Both have sinx/x type spectral envelope.5-47 对于BPSK 调制,重做5.46的(a)(b)(c)()()U nipolar N R Zc g t A m t =→22sin ()()4cb g b b A fT P f f T fT πδπ⎡⎤⎛⎫⎢⎥=+ ⎪⎢⎥⎝⎭⎣⎦1()[()()]4s g g c c P f P f f P f f =-+--()()cos c c s t A m t t ω= ,(a)(b)()/2/2b b b b t T t T p t T T ⎡⎤⎡⎤+-=-⎢⎥⎢⎥⎣⎦⎣⎦∏∏ ()()()0nm t p t t nT δ=*-∑()()()()()2/22/22sin b b bbj fT j fT b b b b j fT j fT b b b b bP f T Sa fT eT Sa fT eT Sa fT e ej T Sa fT fT πππππππππ--=-⎡⎤=-⎣⎦=()()()()12sin()22sin()2/2sin(/2)2b b b nb b b b n b n b n Mf j T Sa fT fT f T T n jSa fT fT f T n j Sa n n f T ππδππδππδ⎛⎫=⋅- ⎪⎝⎭⎛⎫=- ⎪⎝⎭⎛⎫=- ⎪⎝⎭∑∑∑()()[()()]2c c c A S f Mf f f f f δδ=*-++(c) ()()cos c c s t A m t t ω= m(t)为极性NRZ()()c g t A m t =()()22sin b gc b b fT P f A T fT ππ⎛⎫= ⎪⎝⎭()()()14sgc g c P fP f f P f f ⎡⎤=-+--⎣⎦5-49 Evaluate the magnitude spectrum for an FSK signal with alternating 1 and 0 data. Assume that the mark frequency is 50 kHz, the space frequency is 55 kHz, and the bit rate is 2,400 bits/s. Find the first null-to-null bandwidth. Solution:The result if given by (5-86).f 1: : =50KHz f 2 : =55KHz R : = 2.4 Kbit/s where f2>f121f f h R-=A C := 1122c f f f +=Solution:By problem 5.46:0000*sin(/2)()()() 2/211w here:221()[()()]2c n bc c A n G f C f nf f nf n R f T T S f G f f G f f πδδπ∞∞-∞-∞⎡⎤=-=-⎢⎥⎣⎦====-+--∑∑()()1122()cos()cos()FSK n b c n n b c n s t a p t nT A t a p t nT A t ωθωθ⎡⎤=-⋅+⎢⎥⎣⎦⎡⎤+-⋅+⎢⎥⎣⎦∑∑()()nbnm t a p t nT =-∑null (5550)2 2.49.8kH zB =-+⨯=b.()()c g t A m t =22sin ()()4c b g b b A fT P f f T fT πδπ⎡⎤⎛⎫⎢⎥=+ ⎪⎢⎥⎝⎭⎣⎦1()[()()]4s g g c c P f P f f P f f =-+--null (5550)2 2.49.8kH zB =-+⨯=5.53 A binary baseband signal is pass through a raised cosine-rolloff filter with a 50% rolloff factor and is then modulated onto a carrier. The data rate is 64 kbits/s. Evaluate(a) The absolute bandwidth of a resulting OOK signal.(b) The approximate bandwidth of a resulting FSK s ignal when the mark freqwency is 150KHz and the space freqwency is 155KHz.(Note: It is interesting to compare these bandwidths with those obtained in probs. 5-46 and 5-49) Solution:()0643222R f K H z ===()()010.5321.548B f K H z =+=⨯= a. OOK()()0210.548296OOK B f KHz =+=⨯=b. FSK()()()212155150248101FSK B f f B KHz =-+=-+⨯=5-58 Assume that a QPSK signal is used to send data at a rate of 30 Mbits/s over asatellite transponder. The transponder has a bandwidth of 24 MHz.(a) If the satellite signal is equalized to have an equivalent raised cosine filter characteristic, what is the rolloff factor r required?(b) Could a rolloff factor r be found so that a 50-Mbit/s data rate could be supported?Solution:for QPSK M=4, l=2(a) If the satellite signal is equalized to have an equivalent raised cosine filtercharacteristic, what is the rolloff factor r required?0.6 6.130)24(2)1(230)1(24===+⇒+=⇒r or r r(b) Could a rolloff factor r be found so that a 50-Mbit/s data rate could besupported?()r f B +=10()021T B f r =+()021T B f r =+502424(1)(1)225r r ⇒=+⇒+=A rolloff factor ,r could not be found support 50Mb/s QPSK signaling5.62 Assume that a telephone line channel is equalized to allow bandpass data transmission over a frequency range of 400 to 3100Hz so that the available channel bandwidth is 2700Hz and the midchannel frequency is 1750Hz. Design a 16-symbol QAM signaling scheme that will allow a data rate of 9600 bits/s to be transferred over the channel. In you design, choose an appropriate rolloff factor r and indicate the absolute and 6-dB QAM signal bandwidth. Discuss why you selected the particular value of r that you used. 5.62 Solution:31004002700Q AM B H z =-= 49600162424004M l D Bd ==→=→==()()131004002400127000.125D r r r +=-→+=→=62400dB B D Hz ==习题:5.69 5.715.69 Plot the MSK Type I modulation waveforms x(t) and y(t).5.71 Plot the MSK TypeⅡmodulation waveforms x(t) and y(t).5.67 For π/4 QPSK signal,(a) Caculate the carrier phase shifts when the input data stream is 10110100101010 , where the leftmost bits are first applied to the transmitter.(b) Find the absolute bandwidth of the signal if r=0.5 raised cosine-rolloff filtering is used and the data rate is 1.5Mbits/s.Solution:For π/4 QPSK signal, M=4 ,l=2 0 1.52(1)(1)(1)(10.5) 1.1322T R B f r D r r M H z =+=+=+=+=。